Настоящее изобретение относится к области неразрушающих испытаний металлургических изделий, в частности, трубных изделий и точнее – трубных изделий, с переменным внутренним и/или внешним диаметрами.
Трубы большой длины широко используются в разных областях техники. Можно упомянуть, например, производство электроэнергии, в которых используются трубы, известные как «котлы», нефтедобывающая и газодобывающая промышленности, в которых трубы используются для бурения, добычи и транспортировки (магистральные трубопроводы), или же создание механических конструкций в гражданском строительстве или в автомобильной или авиационной областях.
Для лучшего понимания настоящего изобретения он описан в контексте изделий, главным образом трубных, в частности – труб, в качестве примеров металлургических изделий. Тем не менее, настоящее изобретение предназначено для более широкого применения к профилям, обладающим изменениями геометрии стенок вдоль их главной оси.
Согласно одному аспекту настоящее изобретение также предназначено для применения к трубным профилям, обладающим изменяемой толщиной по своей окружности, например трубы, имеющие полую структуру с квадратным или прямоугольным поперечными сечениями, которые называются профилями SHS (квадратными полыми профилями), а также к трубным профилям с шестиугольным сечением, а также к трубам с круглым внешним и шестиугольным внутренним поперечными сечениями, а также к другим типам поперечного сечения, которые являются результатами намеренных изменений локальной толщины трубы.
Как и большинство металлургических изделий, трубы могут иметь дефекты, связанные с их изготовлением, такие как включения материала в стали, трещины на внутренней поверхности или внешней поверхности, или же пористость. В общем, любая неоднородность стальной матрицы расценивается как изъян, который может ухудшить механическую прочность эксплуатируемой трубы.
По этой причине металлические трубы осматривают после их изготовления не только с целью обнаружения любых дефектов в них, а также, если это применимо, с целью определения полезной информации для оценки уровня риска этих дефектов, в частности, их размера, глубины, положения, типа или ориентации, и соответствие этих труб международным стандартам.
В частности, применяются технологии испытания, включающие использование ультразвуковых волн. Ультразвуковые волны генерируют таким образом, чтобы они распространялись в инспектируемой трубе, и из полученных в результате эхосигналов, исследуют те, которые не могут быть обусловлены геометрической формой трубы. Включения или случаи отсутствия материала приводят к изменениям в среде распространения волны, и соответственно, генерируют эхосигналы при столкновении с ультразвуковыми волнами. Эти изменения могут расцениваться как изъяны.
Интенсивность эхосигнала, созданного изъяном, зависит от угла, под которым волна сталкивается с изъяном. Для направления распространения ультразвуковой волны в трубе, в основном обнаруживают изъяны, ориентированные соответствующим образом, т.е. перпендикулярно направлению распространения, но, тем не менее, с небольшим допуском, порядка нескольких градусов; величина этого допуска обычно составляет от 2 градусов до приблизительно десяти градусов, в зависимости от выбранных устройств.
Изъян, возвращающий эхосигнал, который имеет амплитуду, превышающую пороговую величину, классифицируют как дефект. В целом значение ориентации связано с этим дефектом, который может быть логически выведен из направления проверки, которое представляет собой направление, придаваемое ультразвуковой волне, ультразвуковым датчиком, испускающим волну.
Эта пороговая величина предопределена посредством выборки. Как правило, позиционирующие засечки (глубина и ориентация) используются в качестве эталонных дефектов или стандартных дефектов, обладающих известными размерами, чаще всего – стандартизованных, расположенных в трубе для выборки.
Разные типы дефектов, которые чаще всего могут быть исследованы при испытаниях, описаны ниже:
- поверхностные дефекты:
○ продольные внутренние или внешние дефекты. Эти дефекты создают в ответ на всплеск ультразвуковых импульсов, имеющий по существу поперечное направление (т.е. всплеск, находящийся по существу в плоскости, перпендикулярной оси трубы, или, другими словами, в поперечном сечении трубы) эхосигнал, чья амплитуда больше предопределенной пороговой величины.
○ Внутренние или внешние поперечные дефекты также называют пересекающими дефектами. Эти дефекты создают в ответ на всплеск ультразвуковых импульсов, имеющий в общем продольное направление, т.е. всплеск, находящийся по существу в плоскости, содержащей ось трубы, эхосигнал, чья амплитуда больше другой предопределенной пороговой величины.
○ Наклонные дефекты. Эти дефекты создают в ответ на всплеск ультразвуковых импульсов, в общем отклоняющийся от направления плоскости, содержащей датчик и ось трубы, эхосигнал, чья амплитуда больше другой предопределенной пороговой величины. Наклонный дефект создает в ответ на всплеск, имеющий промежуточную ориентацию между продольной и поперечной ориентациями, эхосигнал, чья амплитуда больше другой предопределенной пороговой величины.
- Дефекты внутри стенок обычно называют «расслаиваниями». Эти дефекты создают в ответ на всплеск ультразвуковых импульсов в общем радиальном направлении, эхосигнал, чья амплитуда больше предопределенной пороговой величины.
На практике изъяны не являются полностью продольными или поперечными, но возвращают более или менее существенный эхосигнал в одном или другом из этих направлений. Ориентацию изъяна могут выбрать в качестве ориентации его наибольшей площади отражения.
Длительность испытания зависит в основном от количества осуществленных всплесков, времени, необходимого для движения ультразвуковых волн вперед и обратно в трубе, времени перехода по любой границе соединения между датчиком и сталью и в некоторой степени времени обработки принимаемых ответных сигналов.
Для того чтобы урегулировать требования, связанные со скоростью и безопасностью производства, обычно ограничивают количество всплесков ультразвуковых импульсов, и в каждой трубе исследуют только дефекты, обладающие определенными ориентациями.
Ограничение количества всплесков также позволяет ограничить электронную обработку данных, и таким образом ограничить затраты на аппаратное обеспечение, необходимое для обработки данных.
Существуют разнообразные ультразвуковые датчики, обычно отличающиеся своей сложностью.
Первый тип преобразователя представляет собой преобразователь с одним элементом (или однокристальный преобразователь). Этот тип датчика обладает направлением испускания ультразвуковых волн, которое зафиксировано конструкцией. В целях реализации настоящего изобретения этот датчик может быть механизированным таким образом, чтобы образовывать направленный датчик, способный испускать ультразвуковую волну с выборочной ориентацией испускания θe, т.е. обеспечивая возможность изменения ориентации испускания θe.
Второй тип преобразователя представляет собой ультразвуковой преобразователь, известный как преобразователь на фазированной решетке, или матрица с последовательным управлением, также известная как линейный преобразователь с несколькими элементами. Этот тип преобразователя содержит множество элементов электроакустического преобразователя, в форме пьезоэлектрических элементов, распределенных по активной поверхности преобразователя, в одном главном направлении. Например, эти пьезоэлектрические компоненты могут быть размещены таким образом, чтобы находиться на одной линии друг с другом и образовывать так называемый «стержневой преобразователь». Преобразователи, распределенные таким образом, называют «одномерными преобразователями». Элементы преобразователя активируются одновременно или с временными задержками, последовательно, согласно временной формуле, так чтобы объединять полученные таким образом ультразвуковые волны для образования отраженного, необязательно сфокусированного, волнового луча (с фокусной точкой перед датчиком), который позволяет исследовать трубу на наличие дефектов, ориентированных в соответствующем направлении.
Также известно испытательное устройство, использующее ультразвуковые волны и содержащее преобразователь, относящийся к одномерному типу с фазированной матрицей, чьи дискретные преобразователи распределены по исследуемой трубе. Такое устройство предоставляет возможность обнаружения продольных дефектов и расслоений, но только в уменьшенном сегменте трубы. Одномерные датчики на фазированной решетке используются наиболее часто, поскольку они более экономичные для практического применения и обеспечивают более быстрое исследование.
Устройство для проверки металлургических изделий также известно из документа WO2014/096700 и содержит ультразвуковой преобразователь, включающий множество дискретных преобразователей (29), которые могут работать независимо друг от друга и могут быть распределены в двумерной структуре. Этот тип преобразователя обеспечивает возможность обнаружения дефектов, имеющих какой-либо наклон, используя единственный датчик, путем предоставления возможности, в частности, ориентировать всплеск без каких-либо ограничений ориентации относительно главного направления датчика.
Также известны датчики EMAT (электромагнитные акустические преобразователи), способные создавать ультразвуковые волны с помощью электромагнитных устройств. Эти датчики обычно позволяют избавиться от потребности в соединительном элементе между датчиком и исследуемым элементом.
Установка для неразрушающего испытания металлургических изделий также известна из документа WO 2003/50527, в котором используется одномерный тип датчика на фазированной решетке. Каждый элемент преобразователя включается один раз, затем обрабатывающая схема анализирует общий отклик трубы на это одно испускание, известное в данной области техники как «всплеск». На основании всплеска, осуществленного в поперечном направлении трубы, можно определить наличие не только дефектов, расположенных перпендикулярно этому направлению, но также и дефектов, имеющих наклон относительно этого перпендикулярного направления, составляющий от +10° до -10°.
В остальной части настоящего текста ультразвуковой преобразователь в равной степени может быть обозначен терминами «датчик», или «щуп», или «преобразователь», хорошо известными специалисту в данной области.
На практике на стенде для испытаний трубного изделия, часто используют три преобразователя: два преобразователя, предназначенные для определения дефектов, ориентированных в продольном направлении, что предоставляет возможность осуществления испытаний в обоих направлениях движения, или обладающих наклоном относительно этого продольного направления, составляющим от +20° до -20°, и третий датчик для обнаружения дефектов, ориентированных в поперечном направлении относительно трубного изделия. Четвертый датчик обычно используется для проверки наличия расслаиваний и для измерения толщины стенок трубного изделия. Также может присутствовать пятый датчик, предназначенный для обнаружения пересекающих дефектов, в дополнение к вышеупомянутому третьему датчику, для осуществления обнаружения в обоих направлениях продольного перемещения трубного изделия.
Из документа FR 3000212 также известно устройство для ультразвуковых испытаний, способное исследовать металлургическое изделие, обнаруживая в нем дефекты, имеющие любую ориентацию. Рассматриваемое устройство использует одинарный датчик, приводимый в действие ограниченное количество раз, что предоставляет возможность сохранения хорошей скорости исследования.
Согласно определенным известным вариантам реализации датчики являются неподвижными и трубе придают винтовое движение.
Согласно другим известным вариантам реализации ультразвуковые датчики или преобразователи приводят во вращение со скоростью несколько тысяч оборотов в минуту вокруг трубы, движущейся вперед с линейной скоростью, которая может достигать приблизительно 1 метра в секунду.
В других известных вариантах реализации, например, в документе FR 2796153, используется датчик, состоящий из множества элементов ультразвукового преобразователя, окружающих трубу. Электронные компоненты позволяют образовывать ультразвуковой луч для вращения вокруг трубы путем переключения групп активированных элементов и последующей замены вышеописанного механического вращения датчиков электронным сканированием.
Эти три типа установок, все из которых хорошо известны специалисту в данной области соответственно как установки «с вращающейся головкой», установки «с вращающейся трубой» и установки с множеством окружающих элементов датчика. В случае использования датчиков, работающих посредством электронного сканирования, относительное вращение трубы/датчиков является виртуальным. В контексте настоящего документа выражение «относительное вращение/перемещение между трубой и конструкцией преобразователей» включает в себя случай, когда относительное вращение является виртуальным.
Все эти методики сегодня применяются к трубным изделиям, имеющим поперечное сечение, известное как постоянное. Термин «трубное изделие, имеющее постоянное поперечное сечение» обозначает трубные изделия, толщина которых является постоянной, или по меньшей мере толщина которых имеет постоянную номинальную величину и допускает небольшое изменение размеров, свойственное процессам производства таких труб, то есть непреднамеренные изменения; причем изменения находятся в пределах допустимых значений, определенных стандартами. Например, допуски размеров труб согласно стандарту Американского нефтяного института (АНИ) составляют порядка от -12,5% до +12,5% номинальной толщины для более распространенных номинальных значений диаметра и толщины.
Тем не менее, недавно были разработаны методики производства трубных изделий, которые теперь позволяют получать стальные трубы, необязательно большой длины и большого диаметра, имеющие сложные формы, т.е. имеющие преднамеренные изменения толщины и/или преднамеренные изменения своих внутренних диаметров и/или внешних диаметров, что приводит, в частности, к изменениям, превышающим допустимые значения, такие как вышеупомянутые от -12,5% до +10% номинальной толщины согласно стандарту АНИ.
В этом случае, ультразвуковые устройства для испытания на наличие дефектов в трубных изделиях не подходят для обнаружения дефектов в трубных изделиях, имеющих такие сложные формы. В частности, автоматизированные устройства для ультразвуковых испытаний, предназначенные для испытания трубных изделий после их изготовления в промышленных масштабах, в частности не подходят для исследования трубных изделий, имеющих сложные формы.
Таким образом, существует потребность в лучшем обнаружении любых дефектов в этих трубных изделиях, имеющих сложные формы.
Автор настоящей заявки разработал методики неразрушающих испытаний для стальных трубных изделий, необязательно большой длины, т.е. в общем до 20 метров, и большого диаметра, т.е. диаметрами до 30 дюймов, т.е. до приблизительно 77 см; имеющих сложные формы, т.е. обладающих изменениями внешнего и/или внутреннего диаметров. Например изменения размеров могут быть образованы утолщением трубы. Эти величины длины и диаметра не ограничивают области применения настоящего изобретения.
Эти трубы могут представлять разные типологии сегментов:
- сегмент, имеющий постоянную толщину и постоянные внешний и внутренний диаметры,
- сегмент, имеющий постоянный внутренний диаметр и внешний диаметр, изменяющийся в продольном направлении, что приводит к увеличению или уменьшению толщины стенки трубы,
- сегмент, имеющий постоянный внешний диаметр и внутренний диаметр, изменяющийся в продольном направлении, что приводит к увеличению или уменьшению толщины стенки трубы,
- сегмент, имеющий внешний и внутренний диаметры, каждый из которых изменяется, с продольным изменением толщины трубы или без него.
Современные автоматизированные стенды для испытаний подходят для обнаружения дефектов в трубах, чей внешний и внутренний диаметры являются постоянными, т.е. трубах, имеющих только один сегмент с постоянной толщиной и постоянными внешним и внутренним диаметрами, но автор настоящей заявки заметил, что эти известные стенды для испытаний не подходят для полного испытания трубных изделий, содержащих сегменты с разными типологиями, внешний и/или внутренний диаметры которых изменяются вдоль их оси. Фактически с помощью автоматического стенда для испытаний известного уровня техники можно провести испытания только основного сегмента, имеющего неизменный внешний и внутренний диаметр.
Фактически автор настоящей заявки заметил, что обнаружение дефекта посредством принципа испускания и приема ультразвукового луча основано на репрезентативном измерении пути ультразвукового луча, в частности – части падающего ультразвукового луча, которая достигает датчика (возвращается в датчик) после его отражения дефектом. Этот путь всплеска ультразвуковых импульсов имеет существенные характеристики: дистанция пути и ориентация траектории, амплитуда луча. Эти характеристики являются постоянными для каждого типа дефекта и каждой модели трубного изделия, имеющей поперечное сечение, известное как постоянное. Под «моделью трубы» подразумевается набор данных, включающий номинальный внешний диаметр, номинальный внутренний диаметр или номинальную толщину, используемую сталь и т.д.
Автор настоящей заявки заметил, что в случае, когда трубное изделие имеет изменяющееся поперечное сечение, т.е. с сегментами, имеющими разные типологии, такие как описаны выше, обнаружение с помощью известных устройств является неэффективным: эхосигнал всплеска ультразвуковых импульсов, измеренный на преобразователе, может иметь слишком низкую амплитуду для обнаружения, или сигнал вообще не обнаруживается.
Автор настоящей заявки заметил, что изменение поперечного сечения трубного изделия приводит к неточностям и отклонениям на пути ультразвукового луча. Будет очевидно, что настоящее изобретение будет компенсировать эффект изменения поперечного сечения трубного изделия для того, чтобы обеспечить оптимизированное промышленное исследование, улучшающее обнаружение дефектов в трубном изделии, имеющих изменяющееся поперечное сечение.
Таким образом, настоящее изобретение обеспечивает возможность улучшения способности обнаруживать дефекты, независимо от изменения размеров и/или формы стенок трубного изделия. Следовательно, его обозначают термином «сложное трубное изделие».
Согласно одному аспекту настоящего изобретения устройство и способ согласно настоящему изобретению предоставляют решение путем адаптации параметров команд испускания ультразвуковой волны из преобразователя в зависимости от местоположения преобразователя, в частности, от продольного положения датчика, путем изменения ориентации испускания преобразователя, или же путем изменения коэффициента усиления испускания преобразователя.
Согласно другому аспекту настоящего изобретения устройство и способ согласно настоящему изобретению предоставляют решение путем адаптации параметров приема ультразвукового сигнала в зависимости от продольного местоположения преобразователя, например, от коэффициента усиления приема или же от положения временного окна приема эхосигнала.
Согласно еще одному аспекту настоящего изобретения устройство и способ согласно настоящему изобретению предоставляют решение путем адаптации параметров команд испускания ультразвуковой волны из преобразователя и/или параметров приема ультразвукового сигнала в зависимости от местоположения на окружности преобразователя, таких как ориентация испускания, коэффициент усиления испускания или приема, или же положение временного окна приема эхосигнала.
- На фиг. 1 и 2 показана традиционная установка для испытания металлургических изделий, в виде спереди и сбоку, соответственно;
- на фиг. 3 изображен принцип облучения ультразвуком стенки трубы с помощью ультразвукового датчика;
- на фиг. 4 изображен схематичный вид в разрезе стенки трубы, имеющей сложную форму с изменяющимися внешним и внутренним диаметрами, и изображен всплеск от ультразвукового преобразователя на поперечный дефект;
- на фиг. 5 изображена развертка типа A всплеска ультразвуковых импульсов и его эхосигнала с течением времени;
- на фиг. 6a-c показано подробное поперечное сечение образца трубы, имеющей изменяющееся поперечное сечение, содержащее продольные дефекты, и два графика сравнения откликов всплесков ультразвуковых импульсов между устройством согласно известному уровню техники и устройством согласно варианту осуществления настоящего изобретения, в соответствии с аспектами отношения «сигнал-шум» ультразвуковых эхосигналов и амплитуды ультразвуковых эхосигналов;
- на фиг. 7a-e показано подробное поперечное сечение образца трубы с изменяющемся поперечным сечением, содержащим поперечные дефекты, и графики сравнения качества откликов всплесков ультразвуковых импульсов на поперечные дефекты между устройством известного уровня техники и устройством согласно одному варианту осуществления настоящего изобретения, в соответствии с аспектами отношения «сигнал-шум» ультразвуковых эхосигналов и амплитуды ультразвуковых эхосигналов, в двух направлениях исследования;
- на фиг. 8a-c показано подробное поперечное сечение образца трубы с изменяющемся поперечным сечением, содержащим дефекты в виде отверстий с плоским дном; а также графики сравнения качества откликов всплесков ультразвуковых импульсов на дефекты с плоским дном между устройством известного уровня техники и устройством согласно одному варианту осуществления настоящего изобретения, в соответствии с аспектами отношения «сигнал-шум» ультразвуковых эхосигналов, а также амплитуды ультразвуковых эхосигналов;
- на фиг. 9 показан пример реализации варианта осуществления настоящего изобретения на образце, содержащем дефекты в виде внутренней продольной засечки и полученная соответствующая развертка типа C;
- на фиг. 10 показан, подобно фиг. 9, другой пример реализации варианта осуществления настоящего изобретения и полученные соответствующие результаты обнаружения внутренних поперечных дефектов в направлении обнаружения;
- на фиг. 11 показан, подобно фиг. 9, другой пример реализации варианта осуществления настоящего изобретения и полученные соответствующие результаты обнаружения внутренних поперечных дефектов в направлении обнаружения;
- на фиг. 12 показана блок-схема маршрута получения и часть обрабатывающих электронных компонентов согласно одному варианту осуществления настоящего изобретения.
- на фиг. 13 показана блок-схема маршрута получения и часть обрабатывающих электронных компонентов согласно другому варианту осуществления настоящего изобретения.
Графические материалы и приложения содержат элементы с определенной характеристикой. Следовательно, они могут служить не только для описания настоящего изобретения, но также для его определения, где это применимо.
Настоящее изобретение будет описано далее в основном с точки зрения изменения параметров исследования в зависимости от продольного положения преобразователя, в соответствии с предпочтительным вариантом осуществления настоящего изобретения. Тем не менее, предусмотрено, что настоящее изобретение также применимо к изменению параметров исследования в зависимости от положения по окружности преобразователя, в сочетании или без сочетания с изменением этих параметров в зависимости от продольного положения датчика.
Настоящее изобретение относится к автоматическому устройству для неразрушающего испытания для обнаружения дефектов сложного трубного изделия (3), содержащему:
- по меньшей мере один ультразвуковой преобразователь (5), имеющий положение, определенное продольным положением (L) и положением (А) по окружности вдоль сложного трубного изделия (3), и расположенный с возможностью испускания ультразвукового луча (Em), обладающего ориентацией испускания θei(L, A),
- управляющие и обрабатывающие электронные компоненты (6), содержащие схему для приведения в действие датчика и приема ответных сигналов, и
- по меньшей мере один каскад (21, 31) усиления с коэффициентом усиления (Gi(L; A)),
- модуль временного фильтра (24), выполненный с возможностью применения временного фильтра (FTi(L; A)) к эхосигналу (Dv, Ds),
и управляющие и обрабатывающие электронные компоненты (6), выполненные с возможностью определения по меньшей мере одного параметра (Vi) всплеска ультразвуковых импульсов в зависимости от продольного положения (L) и/или положения (А) по окружности ультразвукового преобразователя с тем, чтобы обнаружить дефекты в стенке трубы, причем указанный по меньшей мере один параметр выбран из ориентации испускания всплеска (θei(L; A)), коэффициента усиления (Gi(L; A)) или положения временного фильтра (FTi(L; A)).
Согласно одному аспекту настоящего изобретения управляющие и обрабатывающие электронные компоненты (6) могут быть выполнены с возможностью определения по меньшей мере двух параметров всплеска ультразвуковых импульсов (Vi) в зависимости от положения (A) по окружности по меньшей мере одного ультразвукового преобразователя (5) с тем, чтобы обнаруживать дефекты в стенке трубы, причем указанный по меньшей мере один параметр выбран из ориентации испускания всплеска (θei(L; A)), коэффициента усиления (Gi(L; A)) или положения временного фильтра (FTi(L; A)).
В качестве альтернативы, управляющие и обрабатывающие электронные компоненты (6) могут быть выполнены с возможностью определения по меньшей мере двух параметров всплеска ультразвуковых импульсов (Vi) в зависимости от продольного положения (L) по меньшей мере одного ультразвукового преобразователя (5) с тем, чтобы обнаруживать дефекты в стенке трубы, причем указанный по меньшей мере один параметр выбран из ориентации испускания всплеска (θei(L; A)), коэффициента усиления (Gi(L; A)) или положения временного фильтра (FTi(L; A)).
Согласно одному аспекту управляющие и обрабатывающие электронные компоненты (6) выполнены с возможностью определения ориентации испускания всплеска (θei(L; A)), коэффициента усиления (Gi(L; A)) и положения временного фильтра (FTi(L; A)) всплесков ультразвуковых импульсов (Vi) в зависимости от продольного положения (L) по меньшей мере одного ультразвукового преобразователя (5). Таким образом, управляющие и обрабатывающие электронные компоненты (6) также могут быть выполнены с возможностью определения по меньшей мере одного параметра, выбранного из ориентации испускания всплеска (θei(L; A)), коэффициента усиления (Gi(L; A)) и положения временного фильтра (FTi(L; A)) всплесков ультразвуковых импульсов (Vi) в зависимости от положения (A) по окружности по меньшей мере одного ультразвукового преобразователя (5).
Дополнительно устройство может содержать по меньшей мере один датчик (7a) положения для определения продольного положения (L) по меньшей мере одного ультразвукового преобразователя 5 относительно сложного трубного изделия (3). В качестве альтернативы, устройство может содержать по меньшей мере один датчик (7a) положения для определения продольного положения (L) и положения (А) по окружности по меньшей мере одного ультразвукового преобразователя 5 относительно сложного трубного изделия (3).
По меньшей мере один датчик (7a) положения может быть выбран из инкрементального кодового датчика, кодового датчика, установленного в стойке, линейного кодового датчика, кодового датчика с натяжной проволокой, лазерного измерителя скорости, колесного кодового датчика или колесного инкрементального кодового датчика.
В качестве альтернативы, устройство может содержать по меньшей мере один таймер (7b) для определения относительного продольного (L) положения и положения (А) по окружности ультразвукового преобразователя 5.
Согласно другому аспекту по меньшей мере один каскад (21, 31) усиления может представлять собой каскад (21) усиления испускания, имеющий коэффициент усиления испускания (Gei(L; A)), и управляющие и обрабатывающие электронные компоненты (6) выполнены с возможностью изменения указанного коэффициента усиления испускания (Gei(L; A)) в зависимости от продольного положения (L) ультразвукового преобразователя (5).
В одном варианте по меньшей мере один каскад (21, 31) усиления может представлять собой каскад (31) усиления приема, имеющий коэффициент усиления приема (Gri(L; A)), и управляющие и обрабатывающие электронные компоненты (6) выполнены с возможностью изменения указанного коэффициента усиления приема (Gri(L; A)) в зависимости от продольного положения (L) ультразвукового преобразователя (5).
В другом варианте устройство может содержать каскад (21) усиления испускания, имеющий коэффициент усиления испускания (Gei(L; A)) и каскад (31) усиления приема, имеющий коэффициент усиления приема (Gri(L; A)), и в котором управляющие и обрабатывающие электронные компоненты (6) выполнены с возможностью изменения коэффициента усиления испускания (Gri(L; A)) или коэффициента усиления приема (Gri(L; A)) в зависимости от продольного положения (L) ультразвукового преобразователя (5).
Согласно другому аспекту управляющие и обрабатывающие электронные компоненты (6) могут содержать модуль параметрической памяти (MEMp), способный хранить данные в форме ассоциации между по меньшей мере одним продольным положением (L) по меньшей мере одного ультразвукового преобразователя (5) и по меньшей мере одним набором данных, соответствующим параметрам ориентации испускания всплеска (θei(L; A)), коэффициенту усиления (Gi(L; A)) и/или положению временного фильтра (FTi(L; A)).
Таким образом, управляющие и обрабатывающие электронные компоненты (6) могут содержать модуль параметрической памяти (MEMp), способный хранить данные в форме ассоциации между по меньшей мере одним положением (A) по окружности по меньшей мере одного ультразвукового преобразователя (5) и по меньшей мере одним набором данных, соответствующим параметрам ориентации испускания всплеска (θei(L; A)), коэффициенту усиления (Gi(L; A)) и/или положению временного фильтра (FTi(L; A)).
Дополнительно управляющие и обрабатывающие электронные компоненты (6) могут содержать модуль параметрической памяти (MEMp), способный хранить данные в форме ассоциации между парами продольного положения и положения по окружности (L; A) ультразвукового преобразователя 5 и по меньшей мере одним набором данных, соответствующим параметрам ориентации испускания всплеска (θei(L; A)), коэффициенту усиления (Gi(L; A)) и положению временного фильтра (FTi(L; A)).
Согласно одному аспекту настоящего изобретения модуль параметрической памяти (MEMp) может содержать по меньшей мере один набор данных, соответствующих параметрам коэффициента усиления (Gi(L; A)) в форме параметров коэффициента усиления приема (Gei(L; A)) и коэффициента усиления испускания (Gri(L; A)).
Согласно другому аспекту настоящего изобретения управляющие и обрабатывающие электронные компоненты (6) могут быть выполнены с возможностью испускания нескольких всплесков ультразвуковых импульсов (Vi) для одного положения ультразвукового преобразователя (5), причем всплески ультразвуковых импульсов (Vi) имеют углы испускания θej(L), находящиеся между минимальным углом ориентации положения θemini(L) и максимальным углом ориентации положения θemaxi(L).
Таким образом, управляющие и обрабатывающие электронные компоненты (6) могут быть расположены таким образом, чтобы осуществлять от 2 до 8 всплесков ультразвуковых импульсов (Vi) для положения по меньшей мере одного ультразвукового преобразователя (5).
Согласно одному аспекту настоящего изобретения по меньшей мере один ультразвуковой преобразователь (5) может представлять собой стержневой ультразвуковой преобразователь.
Согласно одному аспекту настоящего изобретения по меньшей мере один ультразвуковой преобразователь (5) может представлять собой датчик на фазированной решетке.
Настоящее изобретение также относится к автоматическому способу испытания трубных изделий, имеющих изменяющиеся внешний или внутренний диаметры, который включает следующие этапы:
a) по меньшей мере один ультразвуковой преобразователь (5) размещают в первом положении (P1),
b) осуществляют первый всплеск ультразвуковых импульсов (Vi) путем испускания ультразвукового луча (Em), имеющего первую ориентацию θei (P1) и первое усиление испускания с первым коэффициентом усиления испускания Gei(P1),
c) получают эхосигнал, возвращенный сложным трубным изделием (3) и принятый эхосигнал преобразуют в принятый сигнал, к которому применяют первый коэффициент усиления приема Gri(P1),
d) часть сигнала изолируют в первом временном окне (FTi(P1)),
e) осуществляют второй всплеск ультразвуковых импульсов, повторяя этапы a–d во втором положении (P2), с вторыми параметрами всплеска ультразвуковых импульсов, содержащими вторую ориентацию θei(P2), второй коэффициент усиления испускания Gei(P2), второй коэффициент усиления приема Gri(P2), второе временное окно (FTi(P2)),
и
по меньшей мере один из вторых параметров всплеска ультразвуковых импульсов из второй ориентации θei(P2), второго коэффициента усиления испускания Gei(P2), второго коэффициента усиления приема Gri(P2), второго временного окна (FTi(P2)), отличается от первой ориентации θei(P1), первого коэффициента усиления испускания Gei(P1), первого коэффициента усиления приема Gri(P1) или первого временного окна (FTi(P1)).
Согласно одному аспекту настоящего способа первое положение (P1) содержит первое продольное положение (L1) и первое положение (A1) по окружности и этап e) заменяют этапом f), на котором осуществляют второй всплеск ультразвуковых импульсов, повторяя этапы a–d во втором продольном положении (L2), причем вторые параметры всплеска ультразвуковых импульсов содержат вторую ориентацию θei(L2), второй коэффициент усиления испускания Gei(L2), второй коэффициент усиления приема Gri(L2), второе временное окно (FTi(L2))
и
по меньшей мере один из вторых параметров всплеска ультразвуковых импульсов из второй ориентации θei(L2), второго коэффициента усиления испускания Gei(L2), второго коэффициента усиления приема Gri(L2), второго временного окна (FTi(L2)) отличается от первой ориентации θei(P1), первого коэффициента усиления испускания Gei(P1), первого коэффициента усиления приема Gri(P1) или первого временного окна (FTi(P1)).
Следует понимать, что когда электронные компоненты выполнены с возможностью определения по меньшей мере одного параметра всплесков ультразвуковых импульсов Vi в зависимости от продольного положения L средства испускания ультразвука, с тем, чтобы обнаруживать дефекты в стенке трубы, причем указанный по меньшей мере один параметр выбран из ориентации испускания всплеска θei(L), коэффициента усиления Gi(L) или положения временного фильтра FTi(L); в то время, как электронные компоненты выполнены с возможностью определения по меньшей мере одного параметра всплесков ультразвуковых импульсов Vi в по меньшей мере одном первом продольном положении L1 средства испускания ультразвука, с тем, чтобы обнаруживать дефекты в стенке трубы, причем указанный по меньшей мере один параметр выбран из ориентации испускания всплеска θei(L), коэффициента усиления Gi(L) или положения временного фильтра FTi(L), и эти электронные компоненты также выполнены с возможностью определения по меньшей мере одного второго продольного положения L2 по меньшей мере одного параметра, выбранного из ориентации испускания всплеска θei(L), коэффициента усиления Gi(L) или положения временного фильтра FTi(L), отличающегося от выбранного параметра или параметров в указанном по меньшей мере одном первом продольном положении L1.
Приведена ссылка на фиг. 1 и 2.
Установка для испытания с помощью ультразвуковых волн содержит стенд 1 для испытаний, поддерживающий сложное трубное изделие 3 с осью X для испытания, и ультразвуковой преобразователь 5, расположенный вблизи периферийной поверхности сложного трубного изделия 3 и соединенный с управляющими и обрабатывающими электронными компонентами 6, содержащими электронную схему для приведения в действие датчика.
Сложное трубное изделие 3 можно привести в движение по спирали, так что устройство для испытаний исследует все сложное трубное изделие 3.
В одном варианте сложное трубное изделие 3 можно привести во вращение только относительно стенда 1 для испытаний, и преобразователь 5 сдвигается в продольном направлении стенда 1 для испытаний, синхронно с движением сложного трубного изделия 3, или последовательно. Преобразователь 5 может быть установлен на каретке, которая является подвижной относительно стенда 1 для испытаний. Согласно еще одному варианту, преобразователь 5 может поворачиваться вокруг сложного трубного изделие 3, во время перемещения последнего относительно стенда 1 для испытаний, синхронно или последовательно. Обычно в результате получают два типа траекторий исследования: первую траекторию, известную как спиральная траектория, или вторую траекторию, известную как пошаговая, по единичным сегментам. Пошаговая траектория по сегментам позволяет датчику сканировать окружность трубного изделия перед движением вперед на один шаг в продольном направлении для выполнения следующего сканирования окружности. Преимущество этого типа траектории может заключаться в упрощении электронных компонентов и, например, в минимизации изменений параметров исследования, когда последние зависят от продольного положения преобразователя.
Эти траектории позволяют исследовать все сложное трубное изделие 3, используя датчик с уменьшенной протяженностью относительно окружности сложного трубного изделия 3. В качестве замены, может быть предусмотрено большее количество датчиков, расположенных по кругу вокруг сложного трубного изделия 3, и обеспечивающих последовательность всплесков, которая гарантирует покрытие, когда сложное трубное изделие 3 сдвигается относительно преобразователя 5.
Соединительная среда или «контактирующая среда» в известной терминологии может находиться между преобразователем 5 и периферийной поверхностью сложного трубного изделия 3, например, в форме геля или воды. В одном варианте установка может содержать резервуар, наполненный водой, или любой другой жидкой контактирующей средой, в которую погружены сложное трубное изделие 3 и преобразователь 5. В другом варианте установка может содержать устройство с водяной струей, в этом случае поток воды образует контактирующую среду.
Установка предназначена для исследования сложного трубного изделия 3 с целью проверки наличия в нем дефектов с различными ориентациями. Направление исследования соответствует ориентации исследуемых дефектов внутри сложного трубного изделия 3.
Для обеспечения такой возможности, в откликах от сложного трубного
изделия 3, для того, чтобы отличать эхосигналы, являющиеся результатом дефектов, от эхосигналов, являющихся результатом изъянов, установка для испытаний должна быть откалибрована для каждого из направлений исследования.
Далее будут приведены ссылки на фиг. 3, где представлено трубное изделие, имеющее постоянное поперечное сечение с осью X, содержащей поперечный дефект или внутренний пересекающий дефект Dti, а также ультразвуковой преобразователь 5, выполняющий всплеск ультразвуковых импульсов, луч которого отражается на внутренний пересекающий дефект Dti и возвращается к преобразователю 5.
Современные методики обнаружения используют ультразвуковые преобразователи 5, расположенные вблизи трубного изделия, имеющего постоянное поперечное сечение. Эти датчики соединены опосредованно с трубой посредством жидкой контактирующей среды, обычно воды. Преобразователь 5 имеет главное направление, по существу перпендикулярное оси X сложного трубного изделия 3 и, следовательно, внешней стенке трубного изделия, имеющего постоянное поперечное сечение.
В общем ультразвуковые импульсы распространяются в пределах толщины трубного изделия до внутренней поверхности стенки указанного изделия и выполняют множество перемещений вперед и назад между внутренней поверхностью и внешней поверхностью трубного изделия. При отсутствии дефекта луч отражается несколько раз внутри сложного трубного изделия 3 и коэффициент поглощения металла способствует ослаблению ультразвуковой волны.
Для осуществления всплеска ультразвуковых импульсов, преобразователем 5 управляют таким образом, чтобы испустить ультразвуковую волну в контактирующую среду, например воду, имеющую коэффициент преломления nводы, с углом падения θi, например составляющим приблизительно 17° относительно перпендикуляра к границе воды/стали в месте, где волна встречается с этой границей. Эта волна распространяется в контактирующей среде до поверхности трубного изделия, и преломленная волна распространяется в материале трубного изделия, например стали, с коэффициентом преломления nстали, под углом отражения θr, например, составляющим приблизительно 40°. Связь между углом падения θi и углом отражения θr выражена законом Снеллиуса-Декарта.
sin (θi) / Vводы = sin (θr) / Vстали
где Vводы – скорость ультразвуковой волны в воде и Vстали – скорость волны в стали.
Этот угол отражения или угол облучения ультразвуком, составляющий приблизительно 40°, в материале трубы является очень эффективным углом для обнаружения внутренних или внешних дефектов, расположенных на внутренней поверхности и внешней поверхности. Фактически угол относительно дефекта θd, составляющий приблизительно 40°, обычно позволяет обеспечить возвращение ультразвуковой волны, отраженной дефектом, или эхосигнала по обратному пути к датчику.
Следует понимать, что случай, представленный на фиг. 3, соответствует традиционному случаю исследования трубы, имеющей постоянное поперечное сечение, и обнаружению внутреннего поперечного дефекта Dti. Тем не менее, когда исследуемая труба содержит сегменты, имеющие разные размеры, и сегменты, в которых изменяются внутренние и/или внешние диаметры трубы, внутренние и/или внешние поверхности могут представлять собой наклонные поверхности и, следовательно, становится тяжелее получить желаемый угол относительно дефекта θd, так чтобы эхосигнал всплеска ультразвуковых импульсов возвращался в преобразователь 5.
Это изображено на фиг. 4, которая представляет вид в продольном разрезе части сложного трубного изделия 3, имеющего изменяющееся поперечное сечение. Преобразователь 5 расположен в продольном направлении вдоль оси X с тем, чтобы испускать ультразвуковую волну, проникающую в сложное трубное изделие 3 на сегменте, в котором наклон внешней стенки трубы образует ненулевой угол α относительно продольной оси X трубного изделия: это сегмент, в котором изменяется внешний диаметр трубы. Следовательно, вместо ультразвукового луча, проникающего в стенку трубы, перпендикуляр к внешней поверхности трубы образует дополнительный угол α. Следовательно, этот угол α необходимо учитывать, когда желательно создать ультразвуковой луч, встречающийся с внутренним поперечным дефектом Dti под углом 40° относительно дефекта θd.
На фиг. 4 представлена дополнительная сложность, заключающаяся в том, что ультразвуковая волна встречается с внутренним поперечным дефектом Dti, расположенным на сегменте сложного трубного изделия 3, в котором внутренняя стенка имеет наклон с ненулевым углом β относительно продольной оси трубы. В этом случае угол относительно дефекта θd должен быть равен углу отражения θr, увеличенному на соответствующие углы наклона внутренней и внешней стенок α и β. Например, если необходимо приспособить ориентацию испускания θe таким образом, чтобы обеспечить угол θd=θr+α+β, приблизительно равный 40°, для того, чтобы обеспечить возвращение волны всплеска ультразвуковых импульсов, отраженной поперечным дефектом, в преобразователь 5.
В области ультразвуковых неразрушающих испытаний часто используют следующую терминологию:
- «сканирование» обозначает группу относительных положений трубы/датчика,
- «шаг» обозначает период сканирования (обратно пропорциональный частоте повторений или частоте всплесков ультразвуковых импульсов),
- «развертка типа А» обозначает график электрического напряжения, измеренного на клеммах ультразвукового преобразователя, с временем прохождения на оси X и представлением электрического напряжения, также называемым ультразвуковой амплитудой, на оси Y,
- «развертка типа B» обозначает изображение, относящееся к заданной величине шага, со сканированием, соответствующим всплеску ультразвуковых импульсов, на оси X, временем прохождения на оси Y, и в каждой точке –- с преобразованной ультразвуковой амплитудой на черно-белом или цветном изображении (электронное сканирование для датчика на фазированной решетке, механическое сканирование для датчика с одним элементом),
- «динамика эхосигнала» обычно обозначает график в виде кривой, представляющей максимальную амплитуду, принятую в зависимости от пошагового положения преобразователя, например, от количества всплесков, когда имеется один всплеск на одно положение преобразователя,
- «развертка типа С» обозначает изображение с эквивалентным положением в плоском пространстве точки всплеска ультразвуковой волны как на оси X, так и на оси Y, преобразованное в черно-белое или цветное, представляющее максимальную ультразвуковую амплитуду для этого всплеска записанную во временном селекторе из развертки типа А («амплитуда изображения»). В случае трубы точка на оси X развертки типа С соответствует положению на длине трубы, а точка на оси Y соответствует положению на окружности трубы.
○ В случае плоского изделия точка на оси X развертки типа С соответствует положению на длине плоского изделия, а точка на оси Y соответствует положению на ширине плоского изделия.
На фиг. 5 схематически показан временной профиль сигналов, принятых по возвращении, известный как развертка типа А. Такой сигнал содержит импульсы Em испущенного луча и импульсы эхосигналов, принятых по возвращении. Развертка типа А сигнал может содержать последовательность импульсов Em, за которой следуют импульсы Int эхосигналов от границы между водой и внешней поверхностью трубного изделия, при этом, при наличии дефектов на внутренней поверхности трубы и/или на ее внешней поверхности, эхосигналы относятся к дефектам на внутренней поверхности Dv и эхосигналы относятся к дефектам на внешней поверхности Ds. На практике, граничный эхосигнал Int имеет превосходство над эхосигналом Ds из-за дефекта на внешней поверхности трубного изделия и маскирует этот эхосигнал Ds. Поэтому эхосигнал Ds дефекта на внешней поверхности обычно принимают на луче, отраженном внутренней поверхностью трубного изделия.
При наличии дефекта на внутренней поверхности трубного изделия, максимальную интенсивность эхосигнала Dv обнаруживают, если интенсивность эхосигнала превышает пороговое значение S1 во временном окне Fe1.
При наличии дефекта на внешней поверхности трубного изделия, максимальную интенсивность эхосигнала Ds обнаруживают, если интенсивность эхосигнала превышает пороговое значение S2 во временном окне Fe2.
Таким образом, кривая динамики эхосигнала представляет максимальную амплитуду сигнала, принятого в окне испытания с течением времени для каждого осуществленного всплеска. В качестве альтернативы, кривая динамики эхосигнала может представлять максимальную амплитуду принятого сигнала в зависимости от продольного положения трубы.
На фиг. 5 изображен принцип селектора обнаружения, целью которого является выбор части эхосигналов для возможного обнаружения изъяна.
Каждый электронный канал содержит временной фильтр FT (например блокировочное устройство для получения дискретных значений), соединенный с элементом преобразователя для того, чтобы изолировать последовательные временные окна, которые могут содержать эхосигнал, относящийся к разыскиваемому дефекту (например внутреннему или внешнему дефекту).
Устройство согласно настоящему изобретению может содержать электронные компоненты с модулем 24 временного фильтра, выполненным с возможностью применения по меньшей мере одного временного фильтра FTi (L; A) для того, чтобы изолировать, в пределах соответствующего периода Tri (L; A), временное окно Fei(L; A), в котором вероятно могут присутствовать эхосигналы Dv и/или Ds, характерные для наличия дефектов.
Временное положение и ширина окна Fei(L; A) зависят от скорости распространения ультразвуковых волн в металле и от скорости распространения в высоте контактирующей среды, например высоте воды, периода всплеска Tr, внешнего диаметра и толщины металлической трубы.
Согласно настоящему изобретению положения и значения ширины временных окон Fei(L; A) можно сделать зависимыми от продольного положения (L) преобразователя, или от положения (А) по окружности датчика, или от сочетания (L; A) продольного положения и положения по окружности преобразователя. Фактически, поскольку внешний и/или внутренний диаметры трубы изменяются, путь ультразвуковой волны может отличаться в зависимости от продольного положения (L) преобразователя 5. Следовательно, главными изменяющимися параметрами являются: расстояние, пройденное в контактирующей среде, расстояние, пройденное в стали трубного изделия, расстояние границ стали/контактирующей среды или стали/воздуха относительно преобразователя 5, а также ориентации поверхностей границ относительно датчика. Например, в первом сегменте трубы путь может быть короче пути этой волны в другом сегменте трубы, в котором толщина трубы увеличена. Следовательно, преимущественным является регулировка положения и ширины временных окон Fei(L) в зависимости от положения датчика, с тем, чтобы избежать использования широких временных окон с большим потреблением ресурсов или с тем, чтобы уменьшить ложные обнаружения. Подобным образом, в трубе, имеющей изменяющуюся толщину вдоль своей окружности, путь ультразвуковой волны будет модифицирован этим изменением толщины, а также наклоном или наклонами, образованными на внешней и внутренней поверхностях.
Согласно другому аспекту устройство согласно настоящему изобретению может содержать один или несколько ультразвуковых преобразователей 5. Ультразвуковые преобразователи 5 содержат элементы преобразователя, способные испускать или принимать ультразвук.
Согласно настоящему изобретению устройство может содержать для ультразвукового преобразователя 5 электронные компоненты (6) для осуществления всплесков, позволяющие осуществлять несколько всплесков для заданного положения преобразователя 5. Указанные электронные компоненты для осуществления всплесков могут содержать обычные компоненты, используемые для каждого осуществляемого всплеска, и/или эксклюзивные компоненты, зарезервированные для каждого из всплесков, осуществляемых в заданном положении. Другими словами, электронные компоненты для осуществления всплесков могут содержать общий канал для разных всплесков или выделенный канал для каждого всплеска. В дальнейшем описании будет упомянут канал приема Vi, связанный с количеством всплесков i, независимо от структуры используемых электронных компонентов. Таким образом, общий канал может последовательно осуществлять n всплесков каналов Vi для i варианта, составляющего от 1 до n, или может быть n выделенных каналов для осуществления n всплесков. Например, электронные компоненты могут быть выполнены с возможностью осуществления от одного до восьми всплесков на одно положение преобразователя 5. Предпочтительно – от двух до шести всплесков.
Предпочтительно способность осуществлять несколько всплесков ультразвуковых импульсов для заданного положения преобразователя 5 позволяет применять к этим всплескам ультразвуковых импульсов несколько ориентаций испускания θei(L; A), находящихся между минимальным углом испускания положения θemini(L; A) и максимальным углом испускания положения θemaxi(L; A). Способность осуществлять несколько всплесков ультразвуковых импульсов для одного и того же положения ультразвукового преобразователя (5) с разными ориентациями испускания позволяет компенсировать непреднамеренные изменения исследуемого объекта. Это будет изображено на примерах.
Следовательно, каналы приема Vi выполнены с возможностью осуществления последовательностей всплесков ультразвуковых импульсов для заданного положения преобразователя 5.
На фиг. 12 показана блок-схема управляющих и обрабатывающих электронных компонентов 6, связанных посредством электронной схемы с ультразвуковым преобразователем 5 для неразрушающего испытания в примере установки, способной реализовать настоящее изобретение.
Цель этой схемы заключается в лучшей демонстрации определенных признаков настоящего изобретения; следовательно, этот вид является упрощенным и не специфичным для конкретного типа датчика; тем не менее, специалисту в данной области будет понятно, как приспособить эту схему в зависимости от типа датчика, используемого в устройстве.
Канал Vi на фиг. 12 содержит генератор 20 импульсов, управляющий испусканием элементов преобразователя.
Генератор 20 импульсов может быть связан с каскадом 21 усиления испускания, функцией которого является усиление импульсного сигнала путем применения коэффициента усиления испускания Gei(L). Этот каскад 21 усиления позволяет усиливать электрический сигнал, создающий всплеск ультразвуковых импульсов.
Этот каскад 21 усиления может быть выполнен с возможностью адаптации коэффициента усиления испускания Gei(L) в зависимости от положения датчика, в частности, от продольного положения L датчика 5, и с этой целью каскад 21 усиления может быть соединен с параметрической памятью MEMp, содержащей величины усиления относительно продольного положения (L) датчика 5.
Каскад 21 усиления испускания может быть соединен с направляющим каскадом 22, выполненным с возможностью применения ориентации θei(L) к лучу всплеска ультразвуковых импульсов. Предпочтительно этот каскад применяет временный закон приведения в действие единичных преобразователей ультразвукового датчика 5. В качестве альтернативы, в частности когда датчик 5 относится к типу с одним элементом, этот каскад управляет модулем ориентации датчика 5, например в форме механизированной опорной пластины датчика.
Каскад 21 усиления испускания и направляющий каскад 22 относятся к испускающим элементам E преобразователя и выполнены с возможностью отправки всплеска ультразвуковых импульсов, имеющего мощность, соответствующую примененному коэффициенту усиления испускания Gei(L), и направление, соответствующее выбранной ориентации испускания θei(L). Направляющий каскад 22 может быть соединен с параметрической памятью MEMp, содержащей значения ориентации относительно продольного положения L датчика 5.
Таким образом, каскад 21 усиления испускания и направляющий каскад 22 могут быть соединены с модулем параметрической памяти MEMp, содержащим параметры ориентации θei(L) и коэффициента усиления испускания Gei(L), зависящие от продольного положения датчика и от типа дефекта, который необходимо охарактеризовать.
Позиционирующий модуль 23 выполнен с возможностью отправки в модуль параметрической памяти положения датчика в форме продольного положения (L) и положения (A) по окружности. Позиционирующий модуль 23 содержит позиционирующие электронные компоненты и по меньшей мере один датчик 7a положения (не изображен на фиг. 12). Позиционирующий модуль 23 указывает модулю параметрической памяти MEMp величины активных параметров в канале Vi для всплеска, предназначенного для обнаружения дефектов определенного типа, в зависимости от положения датчика 5.
На фиг. 13 показана блок-схема управляющих и обрабатывающих электронных компонентов 6 варианта осуществления настоящего изобретения, способных адаптировать параметры всплеска ультразвуковых импульсов в зависимости от продольного положения L и положения А по окружности датчика 5. Каскады усиления испускания 21 и приема 31 могут быть выполнены с возможностью применения соответственно коэффициента усиления испускания Gei(L; A) или приема Gri(L; A) в зависимости от продольного положения L и положения А по окружности датчика 5. Подобным образом, направляющий каскад 22 выполнен с возможностью применения ориентации θei(L; A) к лучу всплеска ультразвуковых импульсов, и временной фильтр FTi(L, A) выполнен с возможностью применения временного окна в зависимости от продольного положения и положения по окружности датчика 5. В этом варианте осуществления, по меньшей мере один из этих параметров изменяется в зависимости от продольного положения L датчика 5 и по меньшей мере один из этих параметров изменяется в зависимости от положения А по окружности датчика 5. В этом случае параметрическая память MEMp адаптирована таким образом, чтобы содержать подходящие параметры. В этом случае позиционирующий модуль 23 выполнен с возможностью отправки в модуль параметрической памяти продольного положения (L) и положения A по окружности датчика.
Датчик 7a положения может представлять собой инкрементальный кодовый датчик, кодовый датчик, установленный в стойке, линейный кодовый датчик, кодовый датчик с натяжной проволокой, лазерный измеритель скорости, колесный кодовый датчик или колесный инкрементальный кодовый датчик.
В качестве альтернативы, позиционирующий модуль может содержать вместо датчика (7a) положения интервальный таймер 7b. Эта альтернатива является возможной, поскольку автоматические стенды для испытаний оснащены средствами относительного перемещения трубы относительно преобразователей, обеспечивая возможность создания повторяемой относительной траектории, определенной с течением времени. Тем не менее, интервальный таймер 7b может быть менее точным, чем датчик 7a положения.
Как было описано ранее, в первом варианте положение датчика 5 соответствует продольному положению (L) датчика 5. Во втором варианте положение датчика 5 соответствует продольному положению (L) и положению (А) по окружности датчика 5. В этом случае позиционирующий модуль 23 выполнен с возможностью отправки в модуль параметрической памяти продольного положения (L) и положения (А) по окружности датчика. В третьем варианте положение датчика 5 соответствует положению А по окружности датчика 5. В этом случае позиционирующий модуль 23 выполнен с возможностью отправки в модуль параметрической памяти положения (А) по окружности датчика.
Преобразователь акустической эмиссии Ei датчика 5 может испускать направленный луч ультразвуковых волн.
Канал Vi содержит принимающий преобразователь Ri, который может быть тем же преобразователем, что и преобразователь акустической эмиссии Ei, или другим преобразователем. Принимающий преобразователь Ri может принимать любой эхосигнал или эхосигналы испущенных сигналов и преобразовывать их в соответствующий электрический сигнал. Принимающий преобразователь Ri может быть соединен с каскадом 31 усиления приема, функция которого заключается в усилении электрического сигнала, принятого принимающим преобразователем Ri.
Каскад 31 усиления приема может быть выполнен с возможностью применения к принятому сигналу усиления с коэффициентом усиления приема канала Vi, обозначенным как Gri(L), который выбран в зависимости от продольного положения (L) и/или положения (А) по окружности преобразователя 5 и от характера исследуемого изъяна. Способность модулировать коэффициент усиления этого каскада усиления приема позволяет улучшать обнаружение дефектов, подобно настраиваемому усилению испускания. Когда этот каскад настроен с аналоговым усилением, это имеет преимущество, заключающееся в усилении принимаемого сигнала, одновременно в некоторой степени ограничивая усиление принимаемых помех. Когда этот каскад настроен с цифровым усилением, это позволяет усиливать принимаемый сигнал, но имеет недостаток, заключающийся в большем усилении помех, чем при аналоговом усилении.
Принимающие преобразователи Ri также могут быть соединены с модулем 24 временного фильтра, выполненным с возможностью применения одного или нескольких временных фильтров (FTi(L). Каждый временной фильтр FTi(L) изолирует временное окно, в котором вероятно будет находиться эхосигнал всплеска ультразвуковых импульсов. Таким образом, функция временного фильтра FTi(L) заключается в выборе части принимаемого сигнала, соответствующего временному окну, в котором эхосигнал Dv, Ds всплеска ультразвуковых импульсов, отклоненный обычным дефектом, вероятно вернется в принимающие преобразователи R, и в способности определенной обработки сигнала за выбранный период времени. Это позволяет уменьшить ресурсы памяти и производительность обработки электронных компонентов, и это также позволяет избежать измерения эхосигнала, не соответствующего ожидаемому эхосигналу от всплеска ультразвуковых импульсов, осуществленному с целью обнаружения типа дефекта, например, вторичного эхосигнала.
Модуль 24 временного фильтра может быть соединен с модулем параметрической памяти MEMp, содержащим параметры положения временных фильтров в зависимости от продольного положения датчика (L) и от типа дефекта, который необходимо охарактеризовать, и необязательно, в одном варианте, от положения (А) по окружности датчика и от его продольного положения (L).
Память MEMp может быть выполнена с возможностью содержания данных, относящихся к положениям и значениям ширины окон Fei(L) в зависимости от положения (L) датчика. Соответственно, модуль 24 временного фильтра содержит временные фильтры FTi(L), выполненные с возможностью модификации положений и значений ширины временных окон Fei(L) для каждого канала приема Vi.
В первом варианте селекторы обнаружения имеют одинаковую длительность или длину для одного и того же типа дефекта. В этом случае характерной переменной величиной является момент открытия селектора обнаружения или его начальное положение, которое обычно реализовано в форме задержки относительно осуществленного всплеска.
Во втором варианте начальное положение и конечное положение селектора обнаружения модифицированы и, таким образом, способны создавать селекторы обнаружения с изменяющейся длиной. Таким образом, в этом варианте используются две характерные переменные величины для настройки значений FTi(L).
За модулем 24 временного фильтра следует модуль 25 обработки, содержащий пороговый детектор, который сравнивает с эталонным значением максимальную интенсивность принятых сигналов Ds, Dv. Этот модуль 25 обработки соединен с регистрирующей памятью 26 каналов для того, чтобы зафиксировать максимальную интенсивность эхосигнала каждого канала Vi.
Когда каналы Vi имеют свои собственные электронные компоненты, регистрирующая память 26 каналов соединена таким же образом с аналоговыми каналами устройства, например память 26 соединена с каждым из каналов V1 V2 V3,…V8.
Когда присутствует единственный электронный компонент для нескольких всплесков, модуль 26 выполнен с возможностью хранения максимальной интенсивности сигнала, принятого от каждого канала Vi, связанного со всплеском ультразвуковых импульсов i.
Регистрирующая память 26 каналов может быть соединена с вычислительным модулем 27, выполненным с возможностью создания кривых динамики эхосигналов. Вычислительный модуль 27 также может создавать развертки типа А, развертки типа B из принятых сигналов с наибольшей интенсивностью среди i всплесков ультразвуковых импульсов, выполненных в заданном положении для выбранного типа дефекта, и этот вычислительный модуль 27 также может создавать развертку типа С исследуемого трубного изделия.
Регистрирующая память 26 каналов может быть соединена с блоком 28 сравнения с пороговым значением. Блок 28 сравнения с пороговым значением сравнивает максимальную интенсивность принятого эхосигнала и пороговый уровень инициирования предупреждения, сохраненный в выделенной памяти 29 для пороговых уровней предупреждения. Этот блок сравнения может инициировать работу модуля 30 предупреждения оператора.
В другом варианте осуществления настоящего изобретения электронные компоненты 6 выполнены с возможностью определения по меньшей мере одного параметра всплеска ультразвуковых импульсов в зависимости от продольного положения (L) и/или положения (А) по окружности средства испускания ультразвука с тем, чтобы обнаружить дефекты в стенке трубы, причем указанный по меньшей мере один параметр выбран из ориентации испускания всплеска θei(L; A), коэффициента усиления G(L; A) или положения временного фильтра FTi(L; A).
Автор настоящей заявки осуществил несколько серий испытаний на образцах трубных изделий, содержащих дефекты, созданных специально для определения качества обнаружения этих дефектов.
В первом примере образец трубы (1) с осью (X) на фиг. 6a имеет несколько сегментов 1a–1e, расположенным таким образом, что:
- cегмент 1a содержит постоянные внешний (Dext) и внутренний (Dint) диаметры,
- сегмент 1b содержит изменяющиеся внешний (Dext) и внутренний (Dint) диаметры, причем внешний диаметр (Dext) увеличивается от сегмента 1a к сегменту 1c и внутренний диаметр уменьшается в том же направлении,
- сегмент 1c содержит внешний диаметр, увеличивающийся от сегмента 1b к сегменту 1d, и внутренний диаметр является постоянным,
- сегмент 1d содержит внешний диаметр и внутренний диаметр, оба увеличивающиеся от сегмента 1c к сегменту 1e,
- сегмент 1e содержит постоянный внешний диаметр и внутренний диаметр, увеличивающийся от сегмента 1d.
Продольные засечки dli (обозначенные как dl1–dl10) длиной 25 мм были созданы на образце трубы на фиг. 6a. Глубина засечек является постоянной и, следовательно, нижняя стенка засечек по существу параллельна поверхности, в которой эти засечки выполнены, которая не изображена на фиг. 6a.
Труба на фиг. 6a была исследована с помощью автоматического устройства для обнаружения дефектов известного уровня техники, затем с помощью устройства согласно настоящему изобретению, с целью измерения интенсивностей обратных эхосигналов каждой продольной засечки dli. В этом устройстве согласно настоящему изобретению на канале приема изменялся только угол испускания θe(L).
Результат этого испытания показан на фиг. 6b и 6c, которые изображают графики, где количество засечек dli, соответствующее количеству засечек на фиг. 6a, показано на оси X, и отношение «сигнал-шум» для фиг. 6b и уменьшение амплитуды в дБ относительно эталонной засечки № 5 на фиг. 6c, показано на оси Y.
На графике 6b изображены три кривые:
- кривая порогового значения, ограничивающая минимальное отношение «сигнал-шум» выбранной засечки на 12 дБ,
- кривая отношений «сигнал-шум», зарегистрированных устройством согласно известному уровню техники (Lex),
- кривая отношений «сигнал-шум», зарегистрированных устройством согласно настоящему изобретению (Linv).
На графике 6c показаны две кривые:
- кривая уменьшения амплитуды в дБ относительно эталонной засечки № 5, зарегистрированной устройством согласно известному уровню техники (Lex),
- кривая уменьшения амплитуды в дБ относительно эталонной засечки № 5, зарегистрированной устройством согласно настоящему изобретению (Linv).
Очевидно, что засечки 5 и 10 зарегистрированы на одном и том же уровне устройством согласно известному уровню техники и устройством согласно настоящему изобретению, что является нормальным, поскольку засечки 5 и 10 расположены в сегменте трубы, имеющем постоянное поперечное сечение, и другая конструкция двух устройств не работает в этом сегменте.
С другой стороны, засечки 2, 3, 6, 7 отправляют очень слабые эхосигналы в устройство согласно известному уровню техники, с уровнями ниже порогового значения, которое может быть обнаружено, в то время, как устройство согласно настоящему изобретению позволяет получать эхосигналы высокого уровня, превышающего 23 дБ, во всех случаях.
Следовательно, из этого можно сделать логический вывод, что устройство согласно известному уровню техники не обнаруживает засечки 2, 3, 7 или даже 6 в режиме исследования изделий, в то время как устройство согласно настоящему изобретению позволяет обнаруживать эти засечки.
На фиг. 6c показано уменьшение амплитуды между эталонной засечкой, обозначенной здесь как dl5, и интенсивностью эхосигналов на других засечках. Уровень сигнала традиционно зафиксирован на 0дБ на эталонной засечке № 5 (или dl5). Наименьшая принятая интенсивность составляет менее 13 дБ при использовании устройства согласно настоящему изобретению, в то время как отклонение достигает 35 дБ в 3 дефектах при использовании устройства согласно известному уровню техники.
Образец трубы на фиг. 7a содержит поперечные засечки dti (dt1–dt18) на последовательности изменяющихся сегментов, подобных вышеописанному примеру. Следует напомнить, что поперечные дефекты могут быть обнаружены с помощью всплесков, имеющих выбранную ориентацию в продольной плоскости, как представлено на фиг. 3 и 4. Поперечные дефекты могут быть обнаружены в обоих продольных направлениях. На фиг. 7b, 7c, 7d, 7e показаны величины отношения «сигнал-шум» и амплитуды эхосигналов, измеренных в первом направлении исследования, а затем во втором направлении исследования, для устройства согласно известному уровню техники и устройства согласно настоящему изобретению, используемых в испытании на фиг. 6a-c, т.е. где только изменяется угол испускания θe(L) на канале приема.
Следует отметить, что для исследования в первом направлении на фиг. 7b, 7c ясно видно улучшение амплитуды обратного сигнала, измеренного на определенных поперечных дефектах, внутренних или внешних. Точнее, при использовании устройства согласно известному уровню техники, дефекты, обозначенные как Dt2, Dt3, Dt11, Dt15 и Dt16, могут быть обнаружены в ограниченной степени или не могут быть обнаружены, поскольку отношение «сигнал-шум» принятых эхосигналов равно или меньше 12 дБ.
При использовании устройства согласно настоящему изобретению все эти дефекты можно обнаружить. Кроме этого, уровень отношения «сигнал-шум» принятых эхосигналов, является высоким, более 20 дБ, что позволяет правильно дифференцировать эхосигнал фонового шума. Устройство согласно настоящему изобретению также обеспечивает возможность получения улучшенной однородности между разными зарегистрированными интенсивностями эхосигналов на внутренних поперечных дефектах, с разницей менее 12 дБ между дефектом Dt1 и дефектом Dt6. Эта разница составляет менее 25 дБ на внешних дефектах Dt10 и Dt12.
На фиг. 7b-e показано, что устройство согласно настоящему изобретению, которое изменяет угол ориентации всплеска, позволяет получать лучшие результаты, чем устройство согласно известному уровню техники, в частности, на сегменте трубы, поперечное сечение которого имеет внешний диаметр, изменяющийся в продольном направлении. В направлении обнаружения по фиг. 2, однородность зарегистрированных интенсивностей эхосигналов улучшается как для внутренних, так и для внешних поперечных дефектов, с отклонениями менее 12 дБ применительно к отношению «сигнал-шум», а также применительно к внутренним или внешним поперечным дефектам.
Ниже, на примерах, изображенных на фиг. 9–11, будет видно, что устройство согласно настоящему изобретению также может достигать очень хорошего уровня однородности путем изменения как ориентации испускания θei(L), так и коэффициента усиления Gi(L).
На фиг. 7c показано, что по-прежнему имеется снижение амплитуды эхосигналов на определенных дефектах, которое может считаться существенным, и особенно для внешних дефектов, которых, как следует напомнить, обнаружены посредством эхосигнала ультразвукового луча, отражающегося от внутренней поверхности трубного изделия; следовательно, путь является особенно длинным и ослабление обратного эхосигнала является более чувствительным к изменениям внутренних и внешних диаметров. Ослабление по-прежнему может составлять порядка 25 дБ на дефектах 12–14. Следовательно, этот отклик можно дополнительно улучшить, что будет описано далее в варианте осуществления, в котором электронные компоненты 6 расположены таким образом, чтобы изменять по меньшей мере два параметра всплесков ультразвуковых импульсов в зависимости от продольного положения (L) средства испускания ультразвука, выбранных из ориентации испускания всплеска θei(L), коэффициента усиления Gi(L) или положения временного фильтра FTi(L).
На фиг. 8a и 8b-c соответственно показан образец трубы, в котором было выполнено 4 отверстия с плоским дном Tfpi, используемые в качестве стандартных дефектов применительно к обнаружению дефектов в стенке, известных как «расслаивания», и сравнительные кривые устройства согласно известному уровню техники Lex и устройства согласно настоящему изобретению Linv, обе из которых относятся к измерению отношения «сигнал-шум» (фиг. 8b) и измерению амплитуды сигнала в дБ (фиг. 8c). Электронные компоненты устройства расположены таким образом, чтобы изменять параметр ориентации всплеска θei(L) и положение временного фильтра FTi(L) вдоль продольной оси, не изменяя коэффициент усиления, подобно испытаниям, осуществленным и описанным применительно к фиг. 6 и 7.
Отверстия с плоским дном Tfpi имеют диаметр 6 мм и глубину, равную половине локальной толщины детали. Было решено создать дно, параллельное оси трубы, а не параллельное внутренней стенке трубы.
На фиг. 8b показано улучшение, составляющее приблизительно 5 дБ, отношения «сигнал-шум» на сегменте, в котором внешний диаметр изменяется в продольном направлении. На фиг. 8c показано улучшение, составляющее более 15 дБ, уровня амплитуды ответного сигнала на этом же сегменте. Изменение лишь внутреннего диаметра сегмента не оказывает видимого влияния на качество измерения применительно к обнаружению отверстий с плоским дном.
Эти результаты показывают, что устройство согласно настоящему изобретению также позволяет улучшить способность к обнаружению дефектов, относящихся к типу расслаивания, поскольку интенсивности обратных эхосигналов больше у отверстий с плоским дном Tfp3 и Tfp2.
Не обнаружены различия применительно к отверстиям с плоским дном Tfp1 и Tfp4, поскольку эти отверстия созданы в сегментах трубы, имеющих постоянный внешний диаметр, и наклон внутренней стенки не оказывает влияния на измерение, так как всплеск ультразвуковых импульсов направлен на плоское дно. Улучшение этой ситуации возникает благодаря выбору ориентации испускания θe(L) и положения временных фильтров обнаружения FTi(L) в зависимости от продольного положения датчика.
Другие образцы труб с другими значениями толщины и конфигурациями изменений были исследованы и дали подобные результаты, т.е. демонстрировали значительные улучшения способности к обнаружению дефектов всех типов при использовании устройства согласно настоящему изобретению по сравнению с устройством согласно известному уровню техники.
Фиг. 9 состоит из фиг. 9a, 9b, 9c и предназначена для показа полной совокупности испытаний, где на фиг. 9a представлен профиль трубного изделия, имеющий изменяющиеся внешний и внутренний диаметры, содержащий три внутренние продольные засечки, обозначенные A, B, C.
На фиг. 9b изображена развертка 95 типа С, полученная после сканирования образца 93 трубы устройством согласно одному варианту осуществления настоящего изобретения, в котором три параметра Vi всплесков ультразвуковых импульсов изменяются в зависимости от продольного положения ультразвукового датчика 5.
Три зоны видны на развертке 95 типа С на фиг. 9b и соответствуют трем группам параметров исследования. Эти группы параметров изображены на фиг. 9c. На графике 97 показана минимальная и максимальная величины угла испускания θei(L) для каждой зоны и следует понимать, что исследованы все величины с шагом в 3° между минимальной величиной и максимальной величиной. Таким образом, в зоне 1 угол испускания θei(L) изменяется от 0° до 6°. Три всплеска осуществили для каждого положения исследования посредством трех электронных каналов с θe1([1])=0°; θe2([1])=3°; θe3([1])=6°. Условное обозначение [1] заменяет все осевые положения и положения по окружности, которые достигает датчик 5 в зоне 1 в целях исследования. В зоне 2 осуществляют два всплеска на одно положение под углом -6° и под углом -3°. Эти величины такие же в зоне 3. Со ссылкой на обнаружение продольных засечек, специалист в данной области понимает, что ориентация ультразвукового луча, испущенного в случае исследования продольных дефектов, включает в себя поперечный компонент, по существу содержащийся в поперечном сечении трубы и полученный механической ориентацией ультразвукового преобразователя 5, с «механическим» углом θm, с выбранной величиной приблизительно 17° относительно перпендикуляра к оси трубного изделия, проходящей через точку встречи испущенного луча и внешней поверхности трубного изделия, а также продольный компонент, соответствующий углу испускания θe(L), полученному в варианте осуществления на фиг. 9 электронным управлением преобразователем на фазированной решетке. В случае этого исследования механический угол θm является фиксированным, в то время как угол испускания θe(L) изменяется в зависимости от продольного положения L преобразователя 5.
На графике 98 показаны значения открывания и закрывания временного окна FTi(L) и, следовательно, позиционирование селектора обнаружения для каждой зоны, заданные в мм в воде. Селектор в зоне 3 замедлен относительно селектора в зоне 2, который, в свою очередь, отстает от селектора в зоне 1. Это позволяет учитывать более длинный путь ультразвуковой волны в зоне 3, где продольная засечка C наиболее удалена от преобразователя 5, по сравнению с зоной 1, где продольная засечка A расположена ближе к преобразователю 5.
Коэффициент усиления Gi(L) и его изменение относительно продольного положения преобразователя 5 представлено на графике 99. Коэффициент усиления увеличивается на 1 дБ в зонах 2 и 3 относительно коэффициента усиления, используемого в зоне 1. В этом примере коэффициент усиления приема Gri(L) модифицируют в зависимости от продольного положения преобразователя 5.
Полученная развертка 95 типа С показывает удовлетворительное обнаружение всех продольных засечек и отсутствие нежелательного эхосигнала, создающего «фантомный» дефект. Кроме этого, отношение «сигнал-шум» 96 является очень однородным во всех трех дефектах, составляя 13 или 12 дБ.
Фиг. 10 состоит из фиг. 10a, 10b, 10c, и показывает пример результата, полученного путем реализации изобретения для обнаружения внутренних пересекающих дефектов путем изменения только коэффициента усиления ультразвукового луча. В данном случае деталь исследуют в направлении 1, т.е. сканируют от дефекта A к дефекту I.
На фиг. 10a показано частичное поперечное сечение профиля 103 трубного изделия, содержащего поперечные засечки 104, распределенные в продольном направлении по внутренней поверхности трубного изделия 103 и обозначенные буквами A – I. Каждая засечка имеет длину 10 мм.
На фиг. 10b показана развертка 105 типа С, полученная в результате исследования трубного изделия 103 устройством согласно настоящему изобретению. Эта развертка типа С позволяет ясно идентифицировать каждую засечку A–I. Устройство согласно настоящему изобретению позволило идентифицировать все эти засечки. Пронумерованные зоны 1–8, соответствующие виртуальному делению трубного изделия вдоль продольной оси, изображены на развертке 105 типа С на фиг. 10b. Эти зоны соответствуют группам параметров, содержащих ориентацию испускания θje(L), позиционирование селекторов обнаружения FTi(L) и коэффициент усиления Gi(L). В сочетании с разверткой 105 типа С, показано среднее отношение «сигнал-шум» (SNR) 106, измеренное на каждом обнаруженном дефекте.
На фиг. 10c показаны значения параметров для каждой зоны 1–8. В рамках примера, изображенного на фиг. 10, для ориентации испускания выбраны значения, представленные на графике 107, минимальные и максимальные значения одинаковы для каждой зоны, а именно, от 34° до 43°, соответственно. Устройство выполнено с возможностью осуществления всплесков каждые 3° между минимальным и максимальным граничными значениями. Следовательно, для каждого положения всплеска, устройство осуществляет всего 4 всплеска со следующими углами: 34°, 37°, 40°, 43°. Таким образом, ориентации всплесков являются неизменными независимо от используемого продольного положения (L) датчика 5.
На фиг. 10c также показано позиционирование селекторов обнаружения, обозначенное цифрой 108. Значения положения этих временных селекторов даны в миллиметрах в воде, которая является контактирующей средой, выбранной для этого эксперимента. Эти величины одинаковы во всех зонах 1–8. Таким образом, положения селекторов обнаружения являются неизменными независимо от используемого продольного положения (L) датчика 5.
Посредством графика 109, на фиг. 10c показаны значения коэффициента усиления в дБ для каждой зоны 1–8, являющиеся дополнительными к базовому коэффициенту усиления для образования коэффициента усиления Gi(L). Дополнительный коэффициент усиления составляет, например, 3 дБ в зоне 1, 7 дБ в зоне 3 и 10 дБ в зоне 7. Коэффициент усиления Gi(L) является одинаковым для каждого из 4 всплесков с разной ориентацией, осуществленных в заданном продольном положении (L). Таким образом, в зоне 1 для заданного положения первый всплеск осуществляют под углом испускания в стали, равном 34°, и с дополнительным коэффициентом усиления, равным 3 дБ, второй всплеск осуществляют под углом 37° с дополнительным коэффициентом усиления, равным 3 дБ, третий – с параметрами 40° и 3 дБ, и четвертый всплеск – с параметрами 43° и 4 дБ.
Развертка 105 типа С на фиг. 10b показывает, что изменение лишь коэффициента усиления Gi(L) позволяет обнаруживать все изъяны и, таким образом, позволяет получить первый удовлетворительный результат. Тем не менее полученная развертка типа С имеет неоднородное отношение «сигнал-шум», которое изменяется от 18 до 25 дБ в зависимости от зоны. Развертка типа С показывает другие дефекты, соответствующие засечкам, выполненным на том же трубном компоненте для других экспериментов, в целях экономии.
На фиг. 11 показано второе проведенное испытание, с тем же трубным изделием 104, содержащим засечки A–I, причем в этот раз исследование проводили в направлении 2, то есть со сканированием от дефекта I к дефекту A, с использованием устройства согласно настоящему изобретению, в котором группа параметров отличается от той, которую использовали применительно к фиг. 10a-c, тем, что она использует изменение трех параметров вдоль продольной оси трубного изделия 103. Новая группа параметров представлена на фиг. 11c и полученные соответствующие результаты представлены на фиг. 11b.
Группа параметров на фиг. 11c разделена вдоль продольной оси трубного изделия на 4 зоны, пронумерованные от 1 до 4, т.е. наполовину меньше количества зон, показанного ранее на фиг. 10a-c.
На фиг. 11c показана динамика коэффициента усиления Gi(L), на графике 119, представляющем дополнительный коэффициент усиления, примененный к каждой зоне, в дБ, относительно величины базового коэффициента усиления, выбранной в качестве эталонного коэффициента усиления для исследования. Таким образом, дополнительный коэффициент усиления равен нулю в зоне № 1, 2 дБ в зоне № 2, 1 дБ в зоне № 3 и 2 дБ в зоне № 4. В этом примере эти изменения коэффициента усиления позволяют компенсировать более длинный путь ультразвуковых волн или, например, в зоне 2 на фиг. 11a-c, компенсировать более слабый отклик от поперечной засечки C, которая наклонена и по этой причине может слабее отражать сигнал в направлении всплеска.
Под условным обозначением 118 на фиг. 11c изображено, что позиционирование селекторов обнаружения FTi(L) отличается в зависимости от каждой зоны. Это позиционирование составляет, например, от 220 мм до 240 мм в воде в зоне 2 и составляет от 240 мм до 270 мм в зоне 4. В этом случае селектор обнаружения в зоне 4 не только расположен позже селектора в зоне 2, но также является более широким, чем селектор в зоне 2.
На фиг. 11 под номером 117 показаны ориентации испускания всплесков для заданного положения, представляющие максимальную величину и минимальную величину угла испускания в стали в градусах на одну зону от зоны 1 до зоны 4, и путем осуществления всплесков с этими крайними величинами, а также с шагом в 3° между двумя крайними величинами, отличается в зависимости от зон. Количество всплесков на одну зону также изменяется. Фактически, в зоне № 1 есть два всплеска на одно положение под углами 37° и 40°; в зоне № 2 осуществляют 3 всплеска на одно положение с углами 55°, 58°, 61°; в зоне № 3 также есть 3 всплеска под углами 40°, 43°, 46°; и наконец, в зоне 4 осуществляют 4 всплеска на одно положение под углами 34°, 37°, 40°, 43°. Угол испускания больше в зоне 2 в результате наклона внутренней стенки трубного изделия в этой зоне. Количество всплесков больше в зоне 4, поскольку есть различные типологии изменения диаметров в этой зоне, даже если эти изменения имеют меньшую амплитуду, чем в зоне 2.
Развертка типа С 115 демонстрирует на фиг. 11b, что засечки фактически обнаружены, несмотря на то, что трубный элемент разделен только на 4 зоны. Следовательно, нет видимой необходимости создавать столько зон, определяющих группы параметров, сколько есть сегментов с разными типологиями в трубное изделие. Интенсивность отклика от дефектов является однородной (интенсивность представлена цветным или черно-белым изображением на развертке типа С). Таким образом, уровень шума почти вдвое меньше на засечке G на фиг. 11b по сравнению с уровнем шума на засечке G на фиг. 10b. Наличие по меньшей мере двух параметров или трех параметров, изменяющихся согласно продольному положению датчика, выбранных из коэффициента усиления Gi(L), ориентации испускания θei(L), временного фильтра FTi(L), позволяет улучшить качество обнаружения дефектов в трубных изделиях, имеющих изменяющееся поперечное сечение.
Кроме этого, испытание на фиг. 11a-c позволяет осуществлять исследование с использованием на 20% меньше всплесков, чем в случае, изображенном на фиг. 10a-c, одновременно сохраняя хорошую способность к обнаружению дефектов с удовлетворительным отношением «сигнал-шум» и хорошей однородностью откликов.
Обычно необходимо калибровать устройства для неразрушающего испытания для того, чтобы задать пороговую величину для интенсивности обратного эхосигнала для заданного типа дефекта и заданного типа трубного изделия. Другими словами, обычно выполняют калибровку для дефектов, относящихся к типу продольных засечек, калибровку для дефектов, относящихся к типу поперечных засечек, и калибровку для дефектов, относящихся к типу отверстия с плоским дном, для каждого типа трубного изделия. Например, первый тип может представлять собой трубу с внешним диаметром 250 мм и внутренним диаметром 200 мм, в то время как второй тип может представлять собой трубу, имеющую внешний диаметр 315 мм и внутренний диаметр 275 мм.
Как правило, позиционирующие засечки (глубина и ориентация) используются в качестве эталонных дефектов или стандартных дефектов, обладающих известными размерами, чаще всего – стандартизованных, расположенных в трубе для выборки.
Для того, чтобы ограничить количество всплесков и ограничить вычислительную мощность, необходимую для устройства согласно настоящему изобретению, таким образом предпочтительно калибровать указанное устройство с тем, чтобы определить величины параметров, выбранных из ориентации испускания θe(L), коэффициента усиления G(L) и/или положения временного фильтра FTi(L) для разных продольных положений ультразвукового датчика или датчиков.
Предпочтительно будет выбрано позиционирование стандартных дефектов в разных продольных положениях с тем, чтобы получить величины указанных параметров для каждой типологии сегментов исследуемого сложного трубного изделия 3, имеющего изменяющееся поперечное сечение. Другими словами, калибровку можно выполнять для разных сегментов сложного трубного изделия 3, имеющего изменяющееся поперечное сечение. Калибровку осуществляют на образце трубы, подобном исследуемым сложным трубным изделиям. Таким образом, образец трубы имеет значения диаметра и толщины, подобные исследуемой модели трубного изделия, т.е. идентичные сегменты, одинаковые сложные формы. Более того, образец трубы должен быть изготовлен из материала, идентичного материалу модели, т.е. из того же сорта стали, а также иметь такую же термообработку, те же свойства поверхности.
В этом случае процесс калибровки позволяет на основании образца трубы, характерного для заданного трубного изделия и для типа дефекта, ассоциировать с каждым положением ультразвукового датчика 5 параметры, представляющие собой ориентацию испускания θe(L), коэффициент усиления G(L) и/или положение временного фильтра FTi(L). В этом случае эти параметры могут храниться в таблице, такой как представлена ниже для определения параметров в зависимости от продольного положения (L) датчика.
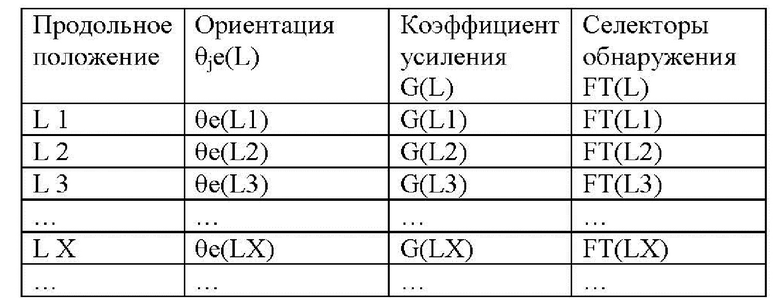
Далее будет приведена ссылка на фиг. 12.
Сложное трубное изделие 3, имеющее изменяющееся поперечное сечение, полученное в ходе производственных процессов, может иметь изменения размеров относительно желаемых номинальных значений. Таким образом, с точки зрения датчика, стенки исследуемого трубного изделия могут иметь фактические наклоны стенок или фактические позиционирования наклонов стенок, которые отличаются от номинальных наклонов и позиционирований. В результате, можно напомнить, что наличие единственной величины для параметров, таких как ориентация испускания θei(L), коэффициент усиления Gi(L) и/или положение временного фильтра FTi(L), не всегда позволяет получать наилучший отклик на всплеск ультразвуковых импульсов для обнаружения заданного дефекта.
Таким образом, согласно одному варианту осуществления настоящего изобретения, устройство содержит управляющие и обрабатывающие электронные компоненты 6, способные осуществлять последовательности всплесков ультразвуковых импульсов по каналам Vi для продольного положения (L), одновременно изменяя для каждого канала Vi по меньшей мере один из параметров, выбранный из ориентации испускания θje(L), коэффициента усиления Gi(L) и/или положения временного фильтра FTi(L), приближая его к номинальным значениям параметров, которые представляют собой ориентацию испускания θe(L), коэффициент усиления G(L) и/или положение временного фильтра FT(L).
Например, для исследования поперечного дефекта Dtex в заданном продольном положении Pex, соответствующая ориентация испускания θe(Pex) может быть определена под углом 20° в воде в продольной плоскости. Восемь всплесков ультразвуковых импульсов можно осуществить с ориентациями испускания θe от 16° до 23° в воде с шагом в 1°. Следовательно, управляющие и обрабатывающие электронные компоненты 6 расположены таким образом, чтобы осуществлять n последовательностей всплесков, например от 1 до 10 последовательностей всплесков.
Каждая максимальная амплитуда соответствующего эхосигнала хранится в соответствующих запоминающих устройствах MemVi каналов, эти значения сравнивают с помощью модуля сравнения каналов «Comp channel», который может запоминать максимальную амплитуду из амплитуд, зарегистрированных на каждом из каналов Vi. Затем максимальную зарегистрированную амплитуду сравнивают с помощью модуля сравнения с пороговым значением, соединенного с памятью пороговых значений. Модуль предупреждения подает предупреждающий сигнал, если максимальная амплитуда, зарегистрированная на разных каналах, превышает пороговое значение, указанное для этого типа дефекта.
В памяти MEMp ориентация испускания θje(L) преимущественным образом может быть определена парой углов, так как продольный компонент и поперечный компонент угла испускания (θNe(L); θSe(L))i могут соответствующим образом представлять угол между перпендикуляром к ультразвуковому датчику и проекцией всплеска в продольной плоскости, т.е. плоскости, содержащей ось трубного изделия, и угол всплеска между перпендикуляром к ультразвуковому датчику и проекцией всплеска в поперечной плоскости, т.е. плоскости, содержащей поперечное сечение трубного изделия.
Например, в рамках исследования, изображенного на фиг. 9, поперечный компонент угла θSe(L) равен механическому углу θm датчика и является фиксированным на протяжении исследования, обычно его выбранная величина составляет 17°, в то время, как продольный компонент угла θNe(L) является изменяющимся в соответствии с продольным положением (L) и его значения составляют от -6° до 6°. Для исследования дефектов, относящихся к типу продольной засечки или отверстия с плоским дном, механический угол θm датчика обычно выбирают равным 0°.
На практике это разделение на составные части адаптировано к используемому типу датчика. Для линейного преобразователя с несколькими элементами, угол может быть модифицирован только в единственной плоскости. Первый угол из двух углов, продольного и поперечного, следовательно, является механическим и второй из этих двух углов изменяется посредством электроники. Для матричного преобразователя с несколькими элементами, возможно изменять эти два угла посредством электроники.
Коэффициент усиления Gi(L) представляет собой коэффициент усиления, который будет применен к положению (L). Чаще всего коэффициент усиления является по существу идентичным для всех каналов. Может быть преимущественным изменение коэффициента усиления и, таким образом, определение нескольких коэффициентов усиления на один канал Gi(L) для каждого канала, в частности с целью улучшения способности к обнаружению дефектов, относящихся к типу расслаивания. Это также позволяет улучшить однородность отклика на наклонных дефектах и с использованием всплесков, имеющих разные ориентации испускания.
В предпочтительном варианте осуществления коэффициент усиления G(L) применяют к сигналу, соответствующему испусканию ультразвуковой волны.
В другом варианте осуществления коэффициент усиления G(L) применяют к сигналу, соответствующему приему эхосигнала всплеска ультразвуковых импульсов. В этом случае коэффициент усиления приема G(L) обозначен как Gr(L). Более преимущественной является модификация коэффициента усиления приема Gr(L), а не коэффициента усиления испускания Ge(L), поскольку последний коэффициент усиления может обладать недостатком, заключающимся в усилении принятого шума, и, таким образом, может быть источником ложноположительных срабатываний.
В одном варианте осуществления устройство содержит коэффициент усиления испускания, выбранный в зависимости от канала Vi и обозначенный как Gei(L).
В другом варианте осуществления устройство содержит коэффициент усиления приема, выбранный в зависимости от канала Vi и обозначенный как Gri(L).
В памяти MEMp данные, характерные для селектора обнаружения FT(L), могут быть парой данных, обозначающей начало временного селектора обнаружения и конец временного селектора обнаружения.
Память MEMp также может содержать данные, характерные для селекторов обнаружения для каждого канала Vi, обозначенные как FTi(L), в форме нескольких последовательностей значений. Фактически для продольного положения L может быть i всплесков, имеющих разные ориентации, и положение селекторов обнаружения может быть необходимо адаптировать из разных селекторов обнаружения. Кроме этого, изменение в позиционировании селекторов обнаружения позволяет компенсировать расхождения значений толщины стенки трубного изделия. В случае, если труба толще желаемой номинальной величины, фактическое время прохождения ультразвуковой волны будет больше. Следовательно, преимущественным образом можно предусмотреть второй селектор обнаружения, расположенный последовательно во времени относительно первого селектора обнаружения.
Кроме этого, согласно одному варианту осуществления, можно иметь две группы каналов Vi, имеющие соответствующие величины углов испускания и примененных коэффициентов усиления, причем эти две группы отличаются друг от друга в основном положением селекторов обнаружения FTi(L) для того, чтобы позволить обнаруживать внутренние дефекты с помощью первой группы каналов Vi и обнаруживать внешние дефекты с помощью второй группы каналов Vi.
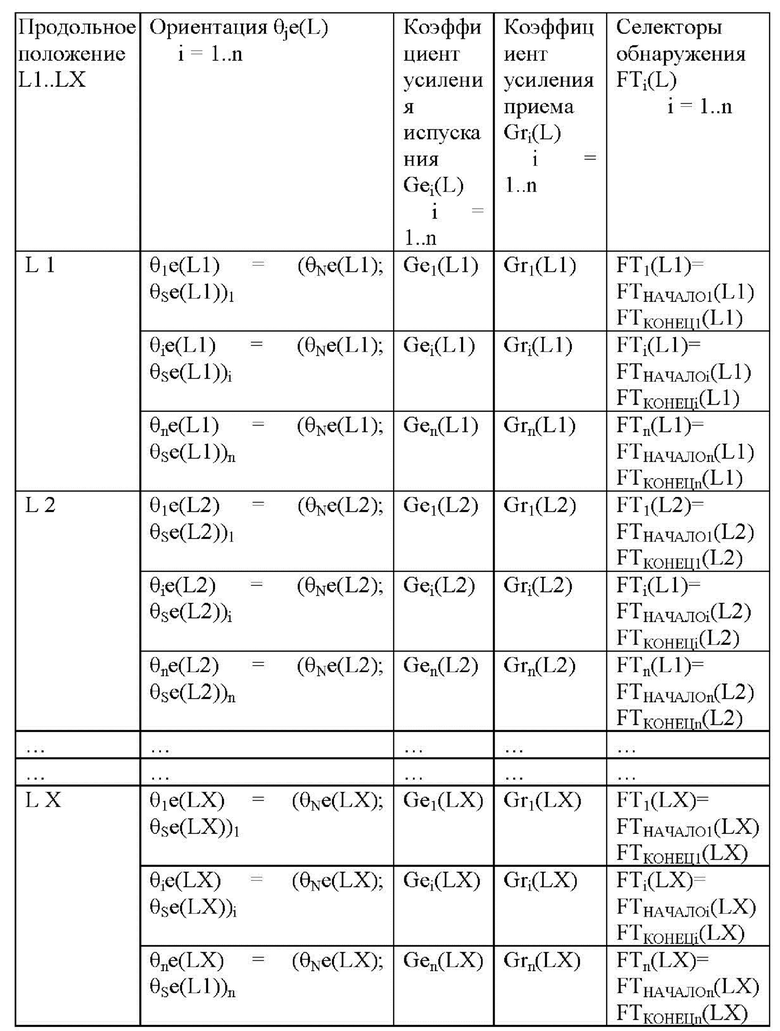
В одном варианте осуществления стенда для испытаний согласно настоящему изобретению, подходящего для исследования трубного изделия с профилем, имеющим лишь намеренные изменения толщины по его окружности, и следовательно, без намеренного изменения его поперечного сечения по длине указанного трубного изделия, или другими словами, с по существу неизменной толщиной вдоль образующей поверхности трубного изделия, память MEMp может быть организована подобно памяти из предыдущего варианта осуществления путем замены переменной величины L переменной величиной A.
В другом варианте осуществления стенда для испытаний согласно настоящему изобретению, подходящего для исследования трубного изделия с профилем, имеющим намеренные изменения толщины как вдоль трубного изделия, так и по окружности трубного изделия, память MEMp может быть организована подобно памяти из предыдущего подробно описанного варианта осуществления путем замены переменной величины L парой переменных величин (L; A).
Настоящее изобретение также относится к способу неразрушающего испытания для обнаружения дефектов в трубных изделиях, имеющих сложную форму, включающему следующие этапы:
- позиционирование ультразвукового преобразователя 5 относительно сложного трубного изделия 3 в первом положении P1 относительно сложного трубного изделия 3;
- для этого первого положения P1 осуществление по меньшей мере одного всплеска ультразвуковых импульсов с использованием ультразвукового луча, имеющего по меньшей мере одну первую ориентацию испускания θje(L; A), первый коэффициент усиления испускания Gei(P1), и прием эхосигнала и применение к этому эхосигналу по меньшей мере одного первого коэффициента усиления приема Gri(P1) и первого временного фильтра FTi(P1);
- позиционирование ультразвукового преобразователя во втором положении P2 относительно сложного трубного изделия 3;
- для этого второго положения P2 осуществление по меньшей мере одного второго всплеска ультразвуковых импульсов с использованием второй ориентации испускания θje(P2), второго коэффициента усиления приема Gri(P2) или второго коэффициента усиления испускания Gei(P2), второго временного фильтра FTi(P2);
- при этом по меньшей мере одно из второй ориентации испускания θje(P2), второго коэффициента усиления приема Gri(P2), второго коэффициента усиления испускания Gei(P2), второго временного фильтра FTi(P2) соответственно отличается от первой ориентации испускания θje(P1), первого коэффициента усиления приема Gri(P1) или первого коэффициента усиления испускания Gei(P1), первого временного фильтра FTi(P1).
В одном варианте осуществления этого способа положение P1 представляет собой первое продольное положение L1 ультразвукового датчика 5 и положение P2 представляет собой второе продольное положение L2 ультразвукового датчика 5.
Этот способ может быть применен к группе смежных продольных положений L, образующих исследуемый сегмент. В этом случае возможно образовать первый исследуемый сегмент, в котором всплески ультразвуковых импульсов Vi будут иметь одинаковые параметры всплесков, образующие первую группу параметров всплеска, и возможно образовать другой исследуемый сегмент, в котором всплески ультразвуковых импульсов будут иметь другую группу параметров всплеска, отличающуюся от первой группы параметров всплеска по меньшей мере одним из параметров, выбранным из ориентации испускания θje(L), коэффициента усиления приема Gri(L), коэффициента усиления испускания Gei(L), временного фильтра FTi(L).
Следует понимать, что для продольного положения L всплески ультразвуковых импульсов могут быть осуществлены вдоль по существу всей окружности трубного изделия, например по окружности в 360°, при этом всплеск распределяется равномерно с угловым шагом, составляющим от 1° до 15°, осуществляя всплески в областях ультразвукового преобразователя 5, определенных продольным положением L и положением А по окружности.
Во втором варианте осуществления этого способа положение P1 представляет собой первое положение A1 по окружности ультразвукового датчика 5 и положение P2 представляет собой второе положение A2 по окружности ультразвукового датчика 5.
В третьем варианте осуществления этого способа положение P1 представляет собой первое продольное положение L1 и положение A1 по окружности ультразвукового датчика 5 и положение P2 представляет собой второе продольное положение L2 и положение A2 по окружности ультразвукового датчика 5.
Следует понимать, что возможно выполнить для положения ультразвукового преобразователя 5 с заданным продольным положением L и положением А по окружности последовательность всплесков ультразвуковых импульсов путем изменения между каждым всплеском по меньшей мере одного параметра из ориентации испускания θje(L; A), коэффициента усиления приема Gri(L; A), коэффициента усиления испускания Gei(L; A), временного фильтра FTi(L; A). Предпочтительно ориентация испускания θje(L) изменяется между минимальной величиной θmine(L; A) и максимальной величиной θmaxe(L; A). Это позволяет улучшить обнаружение дефектов, несмотря не непреднамеренные геометрические изъяны (овальность, смещение центра) трубного изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПЛОСКОСТНЫХ НЕСПЛОШНОСТЕЙ В ТОЛСТОСТЕННЫХ ИЗДЕЛИЯХ УЛЬТРАЗВУКОВЫМ МЕТОДОМ | 2000 |
|
RU2192635C2 |
| Внутритрубный ультразвуковой дефектоскоп | 2016 |
|
RU2626744C1 |
| УЛЬТРАЗВУКОВАЯ АНТЕННАЯ РЕШЁТКА | 2016 |
|
RU2629894C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2629896C1 |
| Способ контроля качества продольных сварных швов зубчатых колес | 2022 |
|
RU2785087C1 |
| Способ акустического контроля трубопровода | 2024 |
|
RU2826796C1 |
| Ультразвуковой дефектоскоп | 1991 |
|
SU1835074A3 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2015 |
|
RU2596242C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В КЛЕЕВЫХ СОЕДИНЕНИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2451289C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1999 |
|
RU2180111C2 |


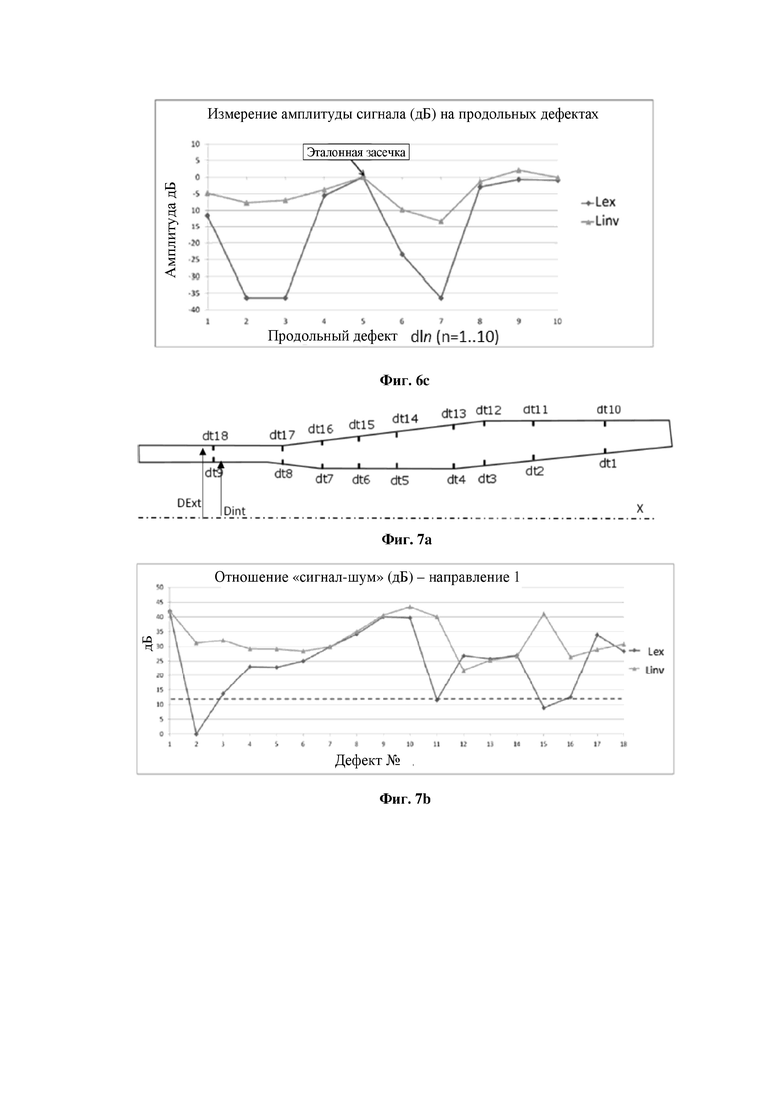

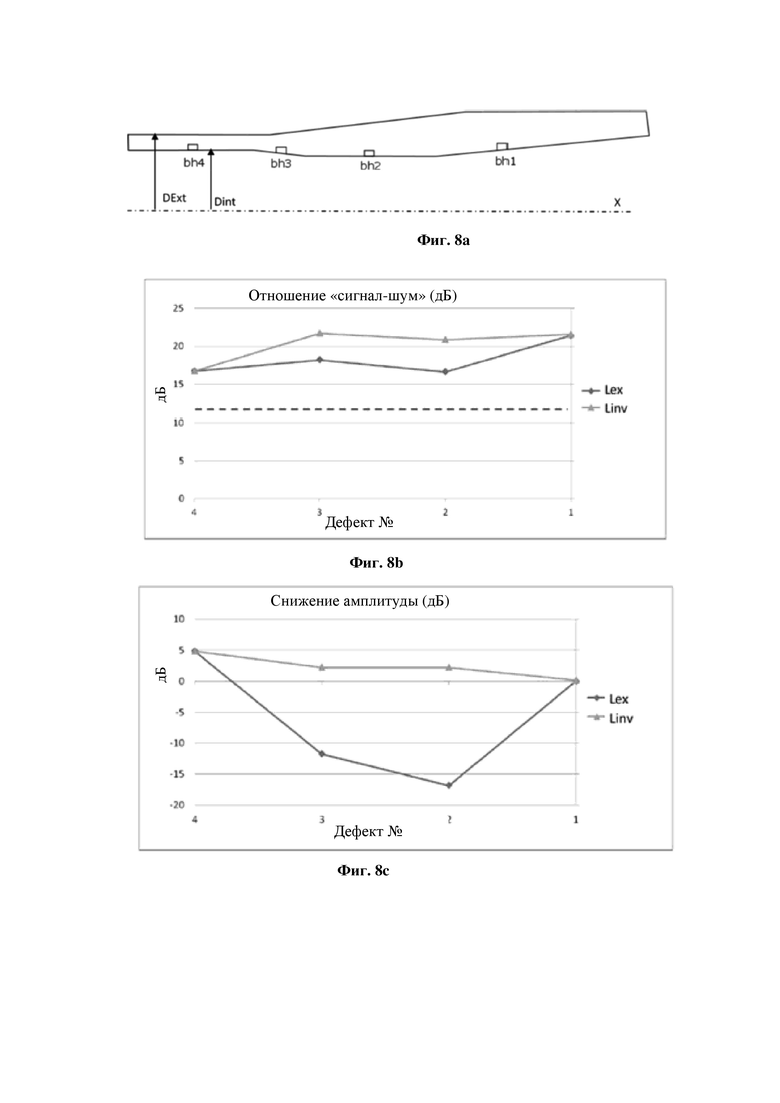
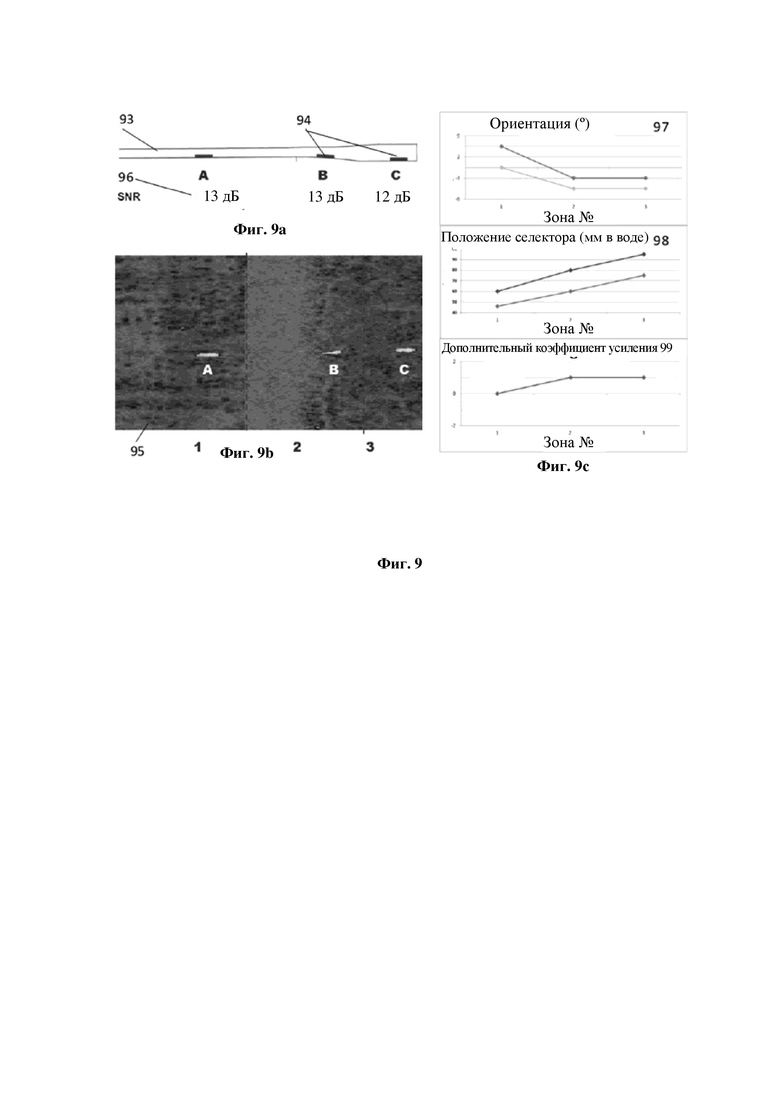

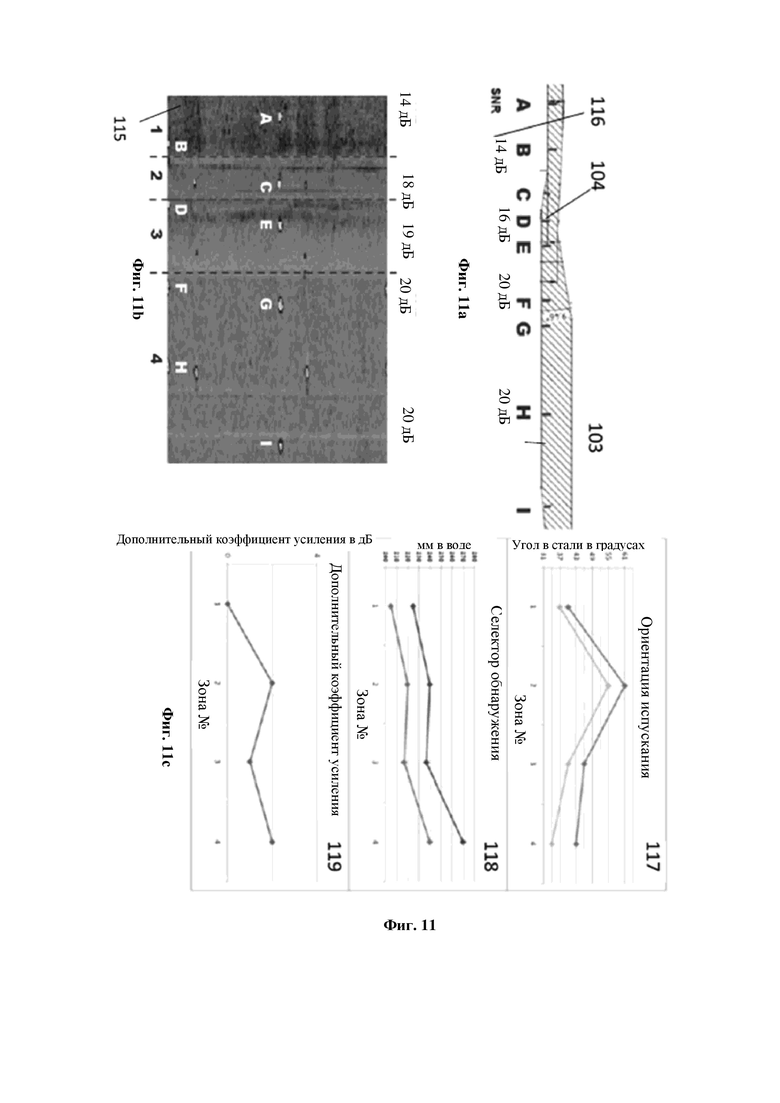
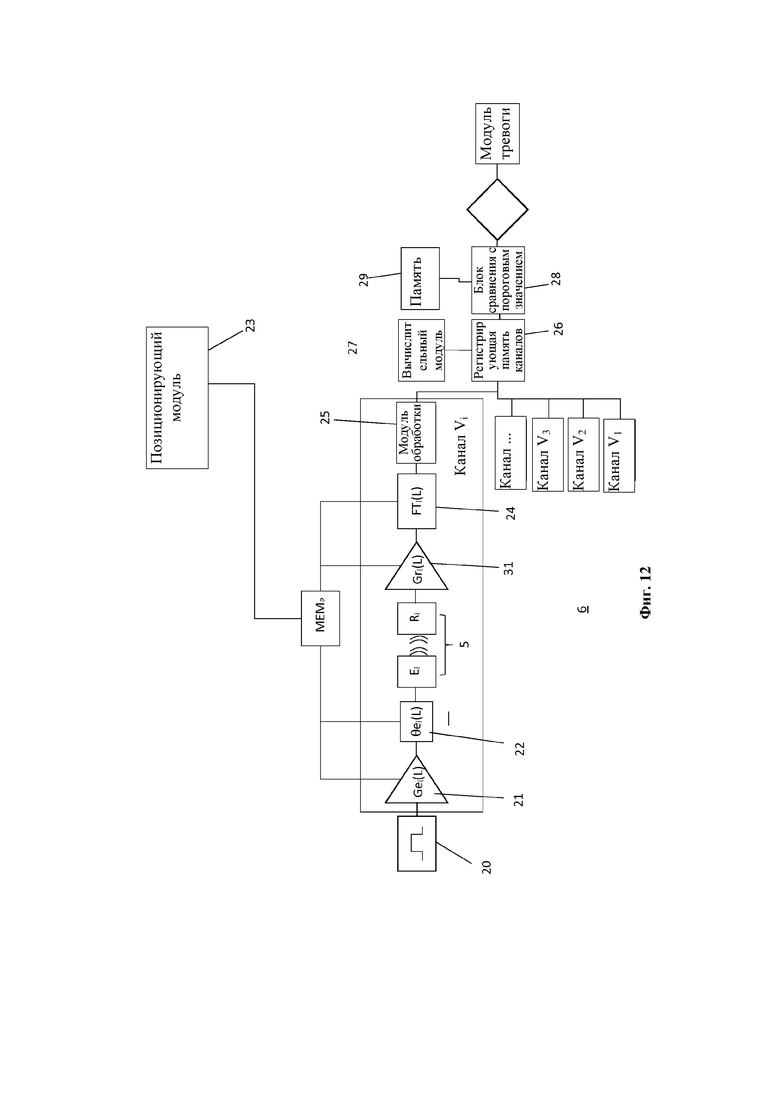
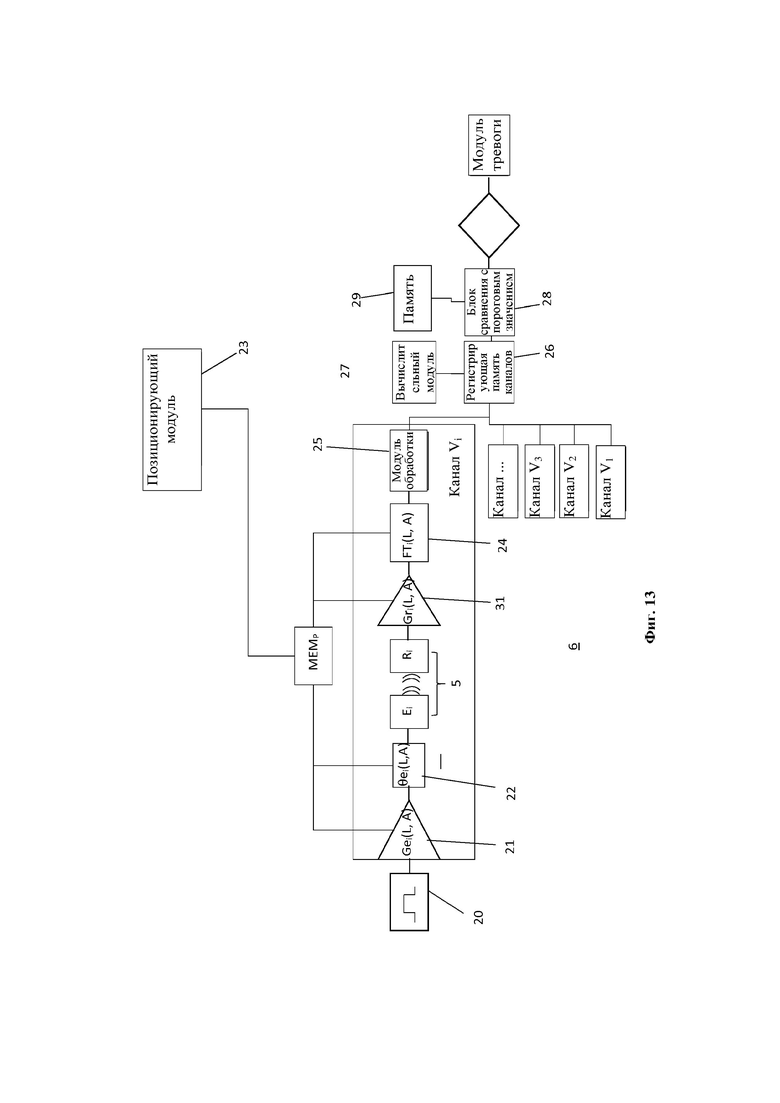
Использование: для обнаружения дефектов в сложном трубном изделии. Сущность изобретения заключается в том, что автоматическое устройство для неразрушающего испытания для обнаружения дефектов сложного трубного изделия содержит: по меньшей мере один ультразвуковой преобразователь, имеющий положение, определенное продольным положением (L) и положением (А) по окружности вдоль сложного трубного изделия, и расположенный с возможностью испускания ультразвукового луча (Em), обладающего ориентацией испускания θei(L, А); управляющие и обрабатывающие электронные компоненты, содержащие схему для приведения в действие датчика и приема ответных сигналов, и по меньшей мере один каскад усиления с коэффициентом усиления (Gi(L; А)), модуль временного фильтра (24), выполненный с возможностью применения положения и ширины временного окна Fei(L; А) во временном фильтре (FTi(L; А)) к эхосигналу (Dv, Ds), при этом управляющие и обрабатывающие электронные компоненты выполнены с возможностью определения по меньшей мере одного параметра (Vi) всплеска ультразвуковых импульсов в зависимости от продольного положения (L) и/или положения (А) по окружности ультразвукового преобразователя с тем, чтобы обнаружить дефекты в стенке трубы, причем указанный по меньшей мере один параметр выбран из ориентации испускания всплеска (θei(L; А)), коэффициента усиления (Gi(L; А)) или положения и ширины временных окон Fei(L; А) во временном фильтре (FTi(L; А)). Технический результат: повышение достоверности обнаружения различных дефектов в трубных изделиях, имеющих сложные формы. 3 н. и 20 з.п. ф-лы, 27 ил., 2 табл.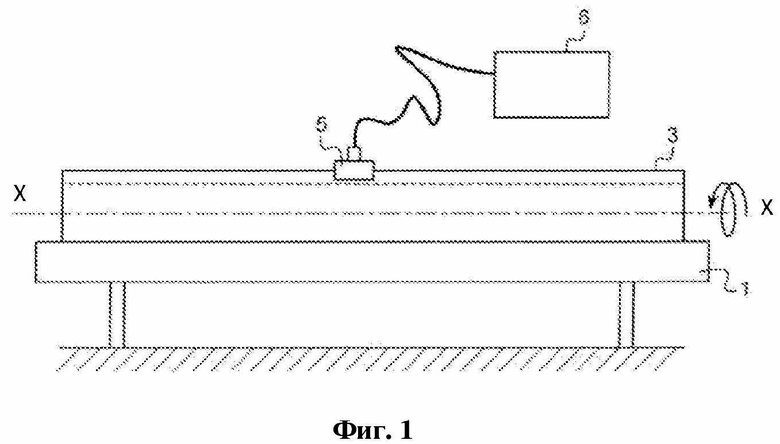
1. Автоматическое устройство для неразрушающего испытания для обнаружения дефектов сложного трубного изделия (3), содержащее:
- по меньшей мере один ультразвуковой преобразователь (5), имеющий положение, определенное продольным положением (L) и положением (А) по окружности вдоль сложного трубного изделия (3), и расположенный с возможностью испускания ультразвукового луча (Em), обладающего ориентацией испускания θei(L, А);
- управляющие и обрабатывающие электронные компоненты (6), содержащие схему для приведения в действие датчика и приема ответных сигналов, и
- по меньшей мере один каскад (21, 31) усиления с коэффициентом усиления (Gi(L; А)),
- модуль временного фильтра (24), выполненный с возможностью применения положения и ширины временного окна Fei(L; А) во временном фильтре (FTi(L; А)) к эхосигналу (Dv, Ds),
отличающееся тем, что управляющие и обрабатывающие электронные компоненты (6) выполнены с возможностью определения по меньшей мере одного параметра (Vi) всплеска ультразвуковых импульсов в зависимости от продольного положения (L) и/или положения (А) по окружности ультразвукового преобразователя с тем, чтобы обнаружить дефекты в стенке трубы, причем указанный по меньшей мере один параметр выбран из ориентации испускания всплеска (θei(L; А)), коэффициента усиления (Gi(L; А)) или положения и ширины временных окон Fei(L; А) во временном фильтре (FTi(L; А)).
2. Устройство по п. 1, отличающееся тем, что управляющие и обрабатывающие электронные компоненты (6) выполнены с возможностью определения по меньшей мере двух параметров всплеска ультразвуковых импульсов (Vi) в зависимости от положения (А) по окружности по меньшей мере одного ультразвукового преобразователя (5) с тем, чтобы обнаруживать дефекты в стенке трубы, причем указанный по меньшей мере один параметр выбран из ориентации испускания всплеска (θei(L; А)), коэффициента усиления (Gi(L; А)) или положения и ширины временных окон Fei(L; А) во временном фильтре (FTi(L; А)).
3. Устройство по п. 1, отличающееся тем, что управляющие и обрабатывающие электронные компоненты (6) выполнены с возможностью определения по меньшей мере двух параметров всплеска ультразвуковых импульсов (Vi) в зависимости от продольного положения (L) по меньшей мере одного ультразвукового преобразователя (5) с тем, чтобы обнаруживать дефекты в стенке трубы, причем указанный по меньшей мере один параметр выбран из ориентации испускания всплеска (θei(L; А)), коэффициента усиления (Gi(L; А)) или положения и ширины временных окон Fei(L; А) во временном фильтре (FTi(L; А)).
4. Устройство по п. 3, отличающееся тем, что управляющие и обрабатывающие электронные компоненты (6) выполнены с возможностью определения ориентации испускания всплеска (θei(L; А)), коэффициента усиления (Gi(L; А)) и положения и ширины временных окон Fei(L; А) во временном фильтре (FTi(L; А)) всплесков ультразвуковых импульсов (Vi) в зависимости от продольного положения (L) по меньшей мере одного ультразвукового преобразователя (5).
5. Устройство по любому из пп. 3, 4, отличающееся тем, что управляющие и обрабатывающие электронные компоненты (6) также выполнены с возможностью определения по меньшей мере одного параметра, выбранного из ориентации испускания всплеска (θei(L; А)), коэффициента усиления (Gi(L; А)) и положения и ширины временных окон Fei(L; А) во временном фильтре (FTi(L; А)) всплесков ультразвуковых импульсов (Vi) в зависимости от положения (А) по окружности по меньшей мере одного ультразвукового преобразователя (5).
6. Устройство по любому из пп. 1-5, отличающееся тем, что содержит по меньшей мере один датчик (7а) положения для определения продольного положения (L) по меньшей мере одного ультразвукового преобразователя (5) относительно сложного трубного изделия (3).
7. Устройство по любому из пп. 1-5, отличающееся тем, что содержит по меньшей мере один датчик (7а) положения для определения продольного положения (L) и положения (А) по окружности по меньшей мере одного ультразвукового преобразователя (5) относительно сложного трубного изделия (3).
8. Устройство по п. 6 или 7, отличающееся тем, что по меньшей мере один датчик (7а) положения выбран из инкрементального кодового датчика, кодового датчика, установленного в стойке, линейного кодового датчика, кодового датчика с натяжной проволокой, лазерного измерителя скорости, колесного кодового датчика или колесного инкрементального кодового датчика.
9. Устройство по любому из пп. 1-5, отличающееся тем, что содержит по меньшей мере один таймер (7b) для определения относительного продольного (L) положения и положения (А) по окружности ультразвукового преобразователя (5).
10. Устройство по любому из предыдущих пунктов, отличающееся тем, что по меньшей мере один каскад (21, 31) усиления представляет собой каскад (21) усиления испускания, имеющий коэффициент усиления испускания (Gei(L; А)) и управляющие и обрабатывающие электронные компоненты (6) выполнены с возможностью изменения указанного коэффициента усиления испускания (Gei(L; А)) в зависимости от продольного положения (L) ультразвукового преобразователя (5).
11. Устройство по любому из предыдущих пунктов, отличающееся тем, что по меньшей мере один каскад (21, 31) усиления представляет собой каскад (31) усиления приема, имеющий коэффициент усиления приема (Gri(L; А)), и управляющие и обрабатывающие электронные компоненты (6) выполнены с возможностью изменения указанного коэффициента усиления приема (Gri(L; А)) в зависимости от продольного положения (L) ультразвукового преобразователя (5).
12. Устройство по любому из пп. 1-9, отличающееся тем, что содержит каскад (21) усиления испускания, имеющий коэффициент усиления испускания (Gei(L; А)) и каскад (31) усиления приема, имеющий коэффициент усиления приема (Gri(L; А)), при этом управляющие и обрабатывающие электронные компоненты (6) выполнены с возможностью изменения коэффициента усиления испускания (Gri(L; А)) или коэффициента усиления приема (Gri(L; А)) в зависимости от продольного положения (L) ультразвукового преобразователя (5).
13. Устройство по любому из пп. 1-12, отличающееся тем, что управляющие и обрабатывающие электронные компоненты (6) содержат модуль параметрической памяти (МЕМр), способный хранить данные в форме ассоциации между по меньшей мере одним продольным положением (L) по меньшей мере одного ультразвукового преобразователя (5) и по меньшей мере одним набором данных, соответствующим параметрам ориентации испускания всплеска (θei(L; А)), коэффициенту усиления (Gi(L; А)) и/или положению и ширине временных окон Fei(L; А) во временном фильтре (FTi(L; А)).
14. Устройство по любому из пп. 1-12, отличающееся тем, что управляющие и обрабатывающие электронные компоненты (6) содержат модуль параметрической памяти (МЕМр), способный хранить данные в форме ассоциации между по меньшей мере одним положением (А) по окружности по меньшей мере одного ультразвукового преобразователя (5) и по меньшей мере одним набором данных, соответствующим параметрам ориентации испускания всплеска (θei(L; А)), коэффициенту усиления (Gi(L; А)) и/или положению и ширине временных окон Fei(L; А) во временном фильтре (FTi(L; А)).
15. Устройство по любому из пп. 1-12, отличающееся тем, что управляющие и обрабатывающие электронные компоненты (6) содержат модуль параметрической памяти (МЕМр), способный хранить данные в форме ассоциации между парами продольного положения и положения по окружности (L; А) ультразвукового преобразователя (5) и по меньшей мере одним набором данных, соответствующим параметрам ориентации испускания всплеска (θei(L; А)), коэффициенту усиления (Gi(L; А)) и положению и ширине временных окон Fei(L; А) во временном фильтре (FTi(L; А)).
16. Устройство по любому из пп. 13-15, отличающееся тем, что модуль параметрической памяти (МЕМр) содержит по меньшей мере один набор данных, соответствующих параметрам коэффициента усиления (Gi(L; А)) в форме параметров коэффициента усиления приема (Gei(L; А)) и коэффициента усиления испускания (Gri(L; А)).
17. Устройство по любому из предыдущих пунктов, отличающееся тем, что управляющие и обрабатывающие электронные компоненты (6) выполнены с возможностью испускания нескольких всплесков ультразвуковых импульсов (Vi) для одного положения ультразвукового преобразователя (5), причем всплески ультразвуковых импульсов (Vi) имеют углы испускания θej(L), находящиеся между минимальным углом ориентации положения θemini(L) и максимальным углом ориентации положения θemaxi(L).
18. Устройство по предыдущему пункту, отличающееся тем, что управляющие и обрабатывающие электронные компоненты (6) расположены таким образом, чтобы осуществлять от 2 до 8 всплесков ультразвуковых импульсов (Vi) для одного положения по меньшей мере одного ультразвукового преобразователя (5).
19. Устройство по любому из предыдущих пунктов, отличающееся тем, что по меньшей мере один ультразвуковой преобразователь (5) представляет собой стержневой ультразвуковой преобразователь.
20. Устройство по любому из предыдущих пунктов, отличающееся тем, что по меньшей мере один ультразвуковой преобразователь (5) представляет собой датчик на фазированной решетке.
21. Автоматический способ испытания трубных изделий, имеющих изменяющиеся внешний или внутренний диаметры, в котором
a) по меньшей мере один ультразвуковой преобразователь (5) размещают в первом положении (Р1),
b) осуществляют первый всплеск ультразвуковых импульсов (Vi) путем испускания ультразвукового луча (Em), имеющего первую ориентацию θei(P1) и первое усиление испускания с первым коэффициентом усиления испускания Gei(P1),
c) принимают эхосигнал, возвращенный сложным трубным изделием (3) и принятый эхосигнал преобразуют в принятый сигнал, к которому применяют первый коэффициент усиления приема Gri(P1),
d) часть сигнала изолируют в первом временном окне (FTi(P1)),
e) осуществляют второй всплеск ультразвуковых импульсов, повторяя этапы a-d во втором положении (Р2), со вторыми параметрами всплеска ультразвуковых импульсов, содержащими вторую ориентацию θei(P2), второй коэффициент усиления испускания Gei(P2), второй коэффициент усиления приема Gri(P2), второе временное окно (FTi(P2)),
отличающийся тем, что
по меньшей мере один из вторых параметров всплеска ультразвуковых импульсов из второй ориентации θei(P2), второго коэффициента усиления испускания Gei(P2), второго коэффициента усиления приема Gri(P2), второго временного окна (FTi(P2)) отличается от первой ориентации θei(P1), первого коэффициента усиления испускания Gei(P1), первого коэффициента усиления приема Gri(P1) или первого временного окна (FTi(P1)).
22. Автоматический способ испытания трубных изделий, имеющих изменяющиеся внешний или внутренний диаметры, отличающийся тем, что первое положение (Р1) содержит первое продольное положение (L1) и первое положение (А1) по окружности, и в котором
a) по меньшей мере один ультразвуковой преобразователь (5) размещают в первом положении (Р1),
b) осуществляют первый всплеск ультразвуковых импульсов (Vi) путем испускания ультразвукового луча (Em), имеющего первую ориентацию θei(P1) и первое усиление испускания с первым коэффициентом усиления испускания Gei(P1),
c) принимают эхосигнал, возвращенный сложным трубным изделием (3) и принятый эхосигнал преобразуют в принятый сигнал, к которому применяют первый коэффициент усиления приема Gri(P1),
d) часть сигнала изолируют в первом временном окне (FTi(P1)),
e) осуществляют второй всплеск ультразвуковых импульсов, повторяя этапы a)-d) во втором продольном положении (L2), причем вторые параметры всплеска ультразвуковых импульсов содержат вторую ориентацию θei(L2), второй коэффициент усиления испускания Gei(L2), второй коэффициент усиления приема Gri(L2), второе временное окно (FTi(L2)),
также отличающийся тем, что
по меньшей мере один из вторых параметров всплеска ультразвуковых импульсов из второй ориентации θei(L2), второго коэффициента усиления испускания Gei(L2), второго коэффициента усиления приема Gri(L2), второго временного окна (FTi(L2)) отличается от первой ориентации Gei(P1), первого коэффициента усиления испускания Gei(P1), первого коэффициента усиления приема Gri(P1) или первого временного окна (FTi(P1)).
| FR 2917832 A1, 26.12.2008 | |||
| 0 |
|
SU170507A1 | |
| НОСИТЕЛЬ ДАТЧИКОВ ДЛЯ ВНУТРИТРУБНОГО ИНСПЕКЦИОННОГО СНАРЯДА (ВАРИАНТЫ) | 2002 |
|
RU2204113C1 |
| СПОСОБ ВНУТРИТРУБНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2001 |
|
RU2212660C1 |
| СПОСОБ ВНУТРИТРУБНОЙ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ | 2001 |
|
RU2182331C1 |
| WO 2015002701 A1, 08.01.2015. | |||

