Изобретение предназначено для снижения потерь личного состава группы технической разведки (TP) ремонтно-восстановительных органов при идентификации технического состояния наземных робототехнических средств (НРТС) в случае выхода их из строя или потери управления в условиях деструктивного воздействия противника.
Известны наземные робототехнические комплексы военного назначения, например, боевой многофункциональный робототехнический комплекс «Уран-9» и многофункциональный комплекс мобильных робототехнических средств «Кунгас» [1], в состав которых входят НРТС.
Применение данных НРТС по назначению будет сопровождаться выходом их из строя. При применении экипажных образцов ВВСТ организуются и разворачиваются ремонтно-восстановительные органы с задачами:
осуществления технической разведки вышедших из строя образцов ВВСТ;
осуществления эвакуации образцов ВВСТ из-под огня противника;
осуществления ремонта вышедших из строя образцов ВВСТ;
возвращения образцов ВВСТ в строй.
Основным преимуществом использования НРТС в бою является сокращение потерь личного состава за счет выполнения боевых задач в безэкипажном режиме. При осуществлении TP экипажных образцов ВВСТ основными задачами TP являются своевременное нахождение вышедших из строя образцов и правильное определение степени их поражения. Это осуществляется группой TP путем поиска поврежденных образцов и технической диагностики их состояния, а также состояния экипажа. Кроме того, информация о состоянии экипажного образца может быть получена непосредственно от экипажа образца. Все эти операции осуществляются в условиях воздействия огня противника и сопряжены с риском угрозы жизни и здоровью личного состава группы ТР.
НРТС представляет собой сложную информационно-техническую систему, выход из строя которой, может произойти по следующим причинам:
воздействие обычных средств поражения;
воздействие средств радиоэлектронного поражения и подавления;
информационное воздействие;
эксплуатационные отказы.
Для определения причины выхода из строя НРТС необходимо осуществить подключение контрольно-проверочной аппаратуры (КПА) к диагностическому разъему робота, что в настоящее время, осуществляется вручную специалистами группы ТР.
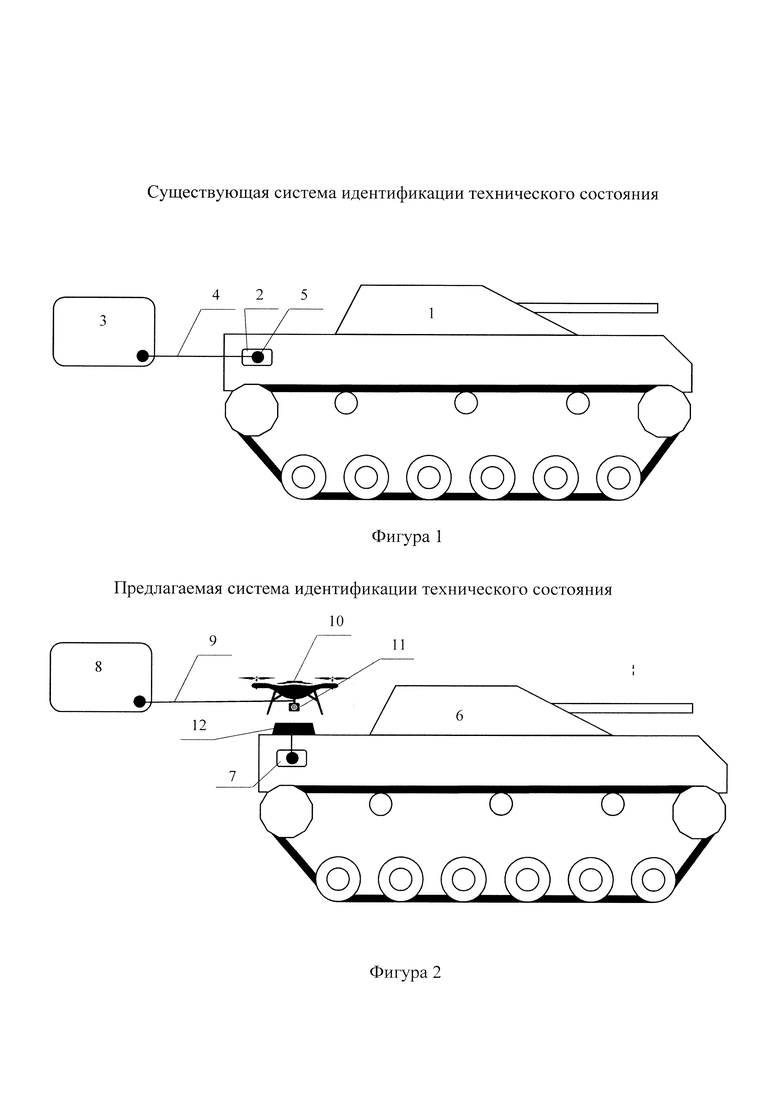
Принцип работы существующей системы проверки технического состояния НРТС представлен на фигуре 1, где: 1 - НРТС; 2 - диагностическая розетка (разъем); 3 - КПА группы TP; 4 - соединительный кабель КПА группы TP и штекера; 5 - штекер соединения с диагностической розеткой (на конце кабеля 4).
В качестве недостатка существующей системы проверки технического состояния НРТС следует отметить следующее - необходимость ручного подключения КПА в условиях воздействия средств поражения противника, что ставит под угрозу жизнь личного состава группы ТР.
Целью настоящего изобретения является снижение потерь личного состава группы TP при осуществлении идентификации технического состояния НРТС в условиях воздействия средств поражения противника.
Данная цель достигается использованием переходного устройства с дополнительной диагностической розеткой и беспилотного летательного аппарата (БпЛА) коптерного типа с прикрепленным к нему соединительным кабелем КПА для диагностики технического состояния (фигура 2), где 1 - НРТС, 2 - диагностическая розетка; 3 - КПА группы TP; 6 - соединительный кабель КПА группы TP и штекера на БпЛА; 7 - БпЛА; 8 - штекер, установленный на БпЛА; 9 - переходное устройство с дополнительной диагностической розеткой, установленной на НРТС.
Принцип действия изобретения заключается в следующем. После визуального обнаружения вышедшего из строя НРТС группа TP с безопасного расстояния запускает БпЛА коптерного типа с прикрепленном к нему соединительным кабелем КПА. БпЛА доставляет кабель до НРТС и осуществляет соединение с переходным устройством, расположенным на крыше моторно-трансмиссионного отделения, методом посадки с последующей состыковкой разъемов и штекера.
Группа TP осуществляет диагностику технического состояния НРТС, оставаясь при этом в укрытии на безопасном расстоянии от средств поражения противника. При этом кабельное соединение позволит осуществить все процедуры, связанные с управлением и оценкой технического состояния НРТС:
1. Идентификацию технического состояния НРТС.
2. Управление НРТС в случае неисправности радиоканала:
отвести НРТС на безопасное расстояние или в ближайшее укрытие; активировать системы защиты и маскировки (система постановки завесы);
активировать, при необходимости, систему противопожарной защиты.
3. Извлечение добытой НРТС информации.
4. Заблокировать или уничтожить информацию и программное обеспечение в случае угрозы захвата НРТС противником и т.д.
Техническим решением предложенного изобретения является использование переходного устройства с дополнительной диагностической розеткой и БпЛА, обеспечивающих удаленное подключение КПА.
Техническим результатом предложенного изобретения является снижение потерь личного состава группы TP при идентификации технического состояния НРТС в условиях воздействия средств поражения противника.
Литература:
1. Роботизация и военное дело будущего / М.С.Баранов, С.Бендетт, С.А. Денисенцев, А.В. Лавров, М.С.Сухарева, Д.В. Федутинов, М.Ю. Шеповаленко; под ред. В.Н. Бондарева. - М.: Центр анализа стратегий и технологий, 2021. - 232 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2023 |
|
RU2817074C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2023 |
|
RU2813930C2 |
| Способ комплексного применения роботизированных средств огневого поражения и радиоэлектронного подавления системы активной защиты бронетехники | 2020 |
|
RU2746772C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| АВТОМАТИЗИРОВАННЫЙ АДАПТИВНЫЙ МОБИЛЬНЫЙ РЕМОНТНЫЙ ЦЕНТР | 2019 |
|
RU2744916C1 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН КРИШТОПА (БКК), СПОСОБ ФУНКЦИОНИРОВАНИЯ БКК И СПОСОБ ФУНКЦИОНИРОВАНИЯ УСТРОЙСТВА ВЕРТИКАЛЬНОГО ЗАПУСКА ПРИ ИСПОЛЬЗОВАНИИ С БКК | 2022 |
|
RU2809067C1 |
| Общевойсковая нашлемная система отображения информации, управления и целеуказания | 2019 |
|
RU2730727C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2021 |
|
RU2783879C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
Изобретение относится к средствам технической диагностики наземных робототехнических комплексов военного назначения. Система идентификации технического состояния наземных робототехнических средств содержит контрольно-проверочную аппаратуру. При этом в ее состав включено переходное устройство с дополнительной диагностической розеткой, расположенное на крыше моторно-трансмиссионного отделения наземного робототехнического средства, и беспилотный летательный аппарат коптерного типа с прикрепленным к нему соединительным кабелем контрольно-проверочной аппаратуры и штекером, установленным на беспилотном летательном аппарате, обеспечивающие удаленное подключение контрольно-проверочной аппаратуры к наземным робототехническим средствам посредством соединения с переходным устройством путем посадки с последующей состыковкой диагностической розетки и штекера. Технический результат - снижение потерь личного состава группы TP при осуществлении идентификации технического состояния НРТС в условиях воздействия средств поражения противника. 2 ил.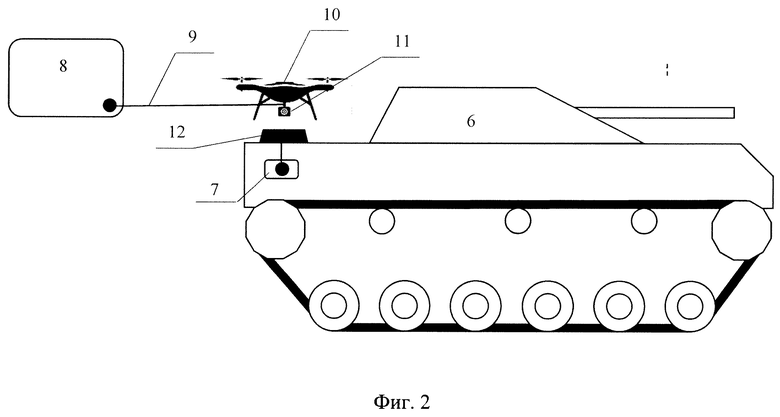
Система идентификации технического состояния наземных робототехнических средств, содержащая контрольно-проверочную аппаратуру, отличающаяся тем, что в ее состав включено переходное устройство с дополнительной диагностической розеткой, расположенное на крыше моторно-трансмиссионного отделения наземного робототехнического средства, и беспилотный летательный аппарат коптерного типа с прикрепленным к нему соединительным кабелем контрольно-проверочной аппаратуры и штекером, установленным на беспилотном летательном аппарате, обеспечивающие удаленное подключение контрольно-проверочной аппаратуры к наземным робототехническим средствам посредством соединения с переходным устройством путем посадки с последующей состыковкой диагностической розетки и штекера.
| Роботизация и военное дело будущего / М.С.Баранов, С.Бендетт, С.А | |||
| Денисенцев, А.В | |||
| Лавров, М.С.Сухарева, Д.В | |||
| Федутинов, М.Ю | |||
| Шеповаленко; под ред | |||
| В.Н | |||
| Бондарева | |||
| - М.: Центр анализа стратегий и технологий, 2021 | |||
| Крутильно-намоточный аппарат | 1922 |
|
SU232A1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| Электромеханическое переключающее устройство | 1956 |
|
SU107432A1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| US 6990406 B2, | |||

