Изобретение относится к измерительной технике и может быть использовано для бесконтактных оптических измерений геометрических параметров вдоль и поперек линии визирования оптического измерительного прибора, например, теодолита, при проведении измерительных работ в машиностроении, в частности при измерении изделий ракетно-космической техники с габаритами от 1 до 10 и более метров, также способ может быть применен в геодезии и строительстве.
Известен способ измерения линейных размеров с применением теодолита, в котором: измеряют угол наклона линии визирования, направленной на верхнюю точку вертикального базисного отрезка известной длины, по значению измеренного угла и известной длине базисного отрезка вычисляют расстояние от теодолита до нижней точки базисного отрезка.
(Геодезия: учебник для студ. учреждений сред. проф. образования / М.И. Киселев, Д.Ш. Михелев. - 11-е изд., стер. - М.: Издательский центр «Академия», 2014. Стр. 83 «дальномер с постоянным базисом»).
Недостатком данного аналога является сравнительно узкая область применения, включающая только измерение расстояния от теодолита до нижней точки базисного отрезка, что ограничивает возможности измерения линейных размеров в системах координат изделий машиностроения.
Наиболее близким предлагаемому является способ измерения геометрических параметров объекта с применением теодолита, в котором: измеряют горизонтальные и вертикальные углы направлений линии визирования теодолита на контрольные реперные знаки (марки), по значениям измеренных углов и известному взаимному положению реперных знаков вычисляют расстояние до объекта измерений и геометрические параметры, связанные с целевыми точками объекта измерений.
(Описание RU 2174672, МПК7 G01C 5/00, G01C 1/02, 08.04.1998).
Недостатком данного аналога является ограниченная область применения, так как он не предназначен для измерения геометрических параметров в системах координат изделий машиностроения. Также аналог обладает недостаточной точностью в связи с тем, что в известном способе не проводят определение положения центра теодолита в системе координат объекта измерений, что приводит к сравнительно грубому определению расстояния до объекта измерений, и, тем самым, уменьшает зависящую от этого точность определения геометрических параметров.
Техническим результатом от использования предлагаемого способа является расширение области применения и повышение точности измерений.
Технический результат достигается тем, что в способе измерения геометрических параметров с применением теодолита, в котором измеряют горизонтальные и вертикальные углы направлений линии визирования теодолита на контрольные реперные знаки (марки), по значениям измеренных углов и известному взаимному положению реперных знаков вычисляют расстояние до объекта измерений и геометрические параметры, связанные с целевыми точками объекта измерений, новым является то, что положение реперных знаков фиксируют в системе координат опоры для установки измеряемого изделия, за вычисляемое расстояние принимают длину перпендикуляра, опущенного из центра теодолита на фронтальную плоскость системы координат опоры, на опору устанавливают измеряемое изделие, систему координат которого фиксируют в системе координат опоры, измеряют горизонтальные и вертикальные углы между направлением на основание перпендикуляра и направлениями на заданные целевые точки на измеряемом изделии, по значениям измеренных углов и вычисленной длине перпендикуляра расчетом определяют линейные размеры, заданные целевыми точками в системе координат изделия.
Совокупность отличительных признаков способа расширяет диапазон измерений и повышает точность измерений.
Сущность предлагаемого способа иллюстрируется графическими материалами, на которых:
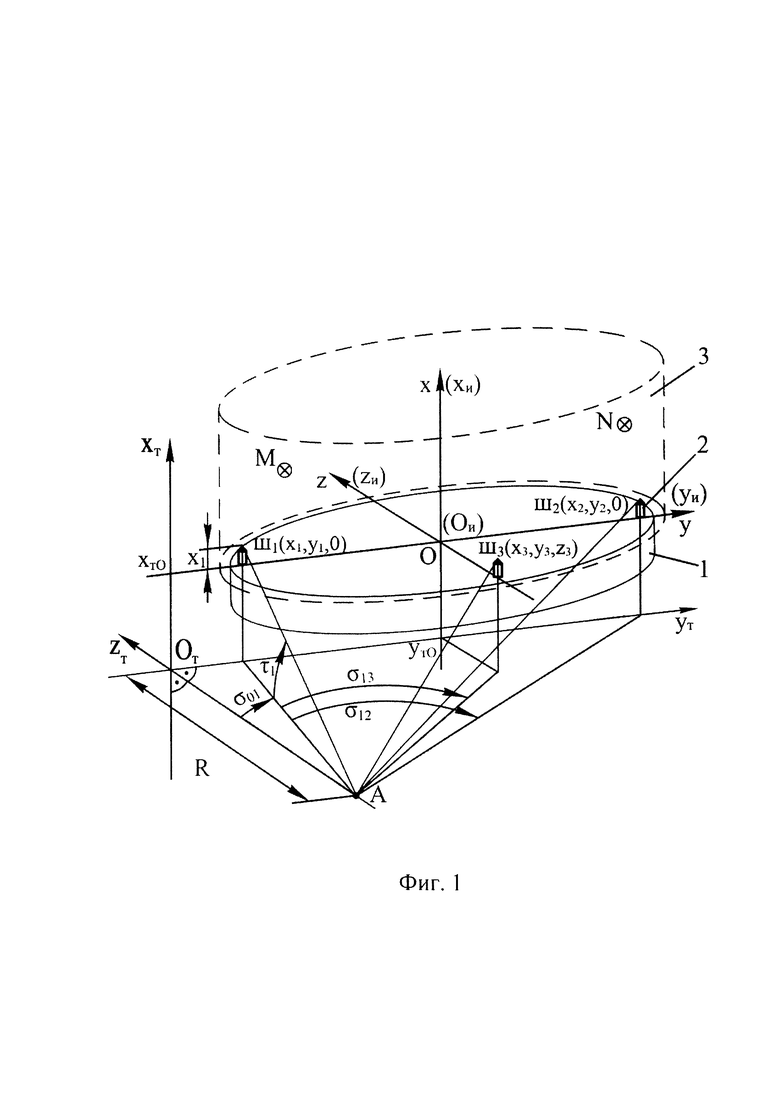
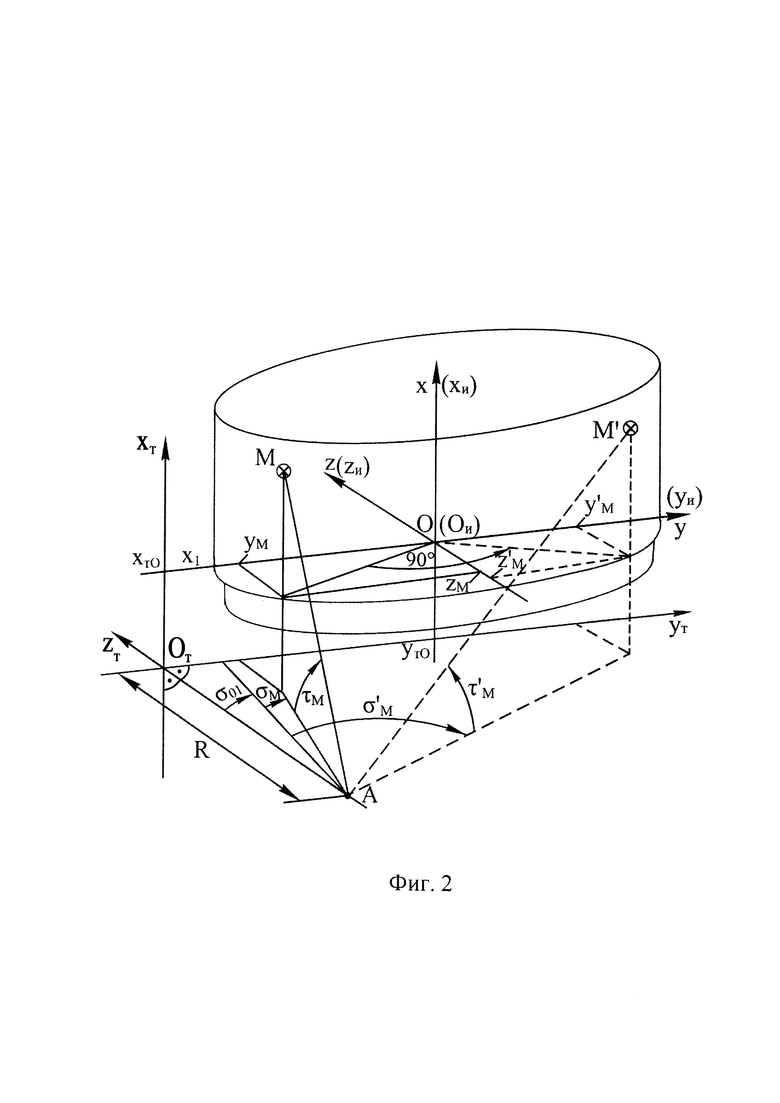
- на фиг.1 - схема измерений углов до контрольных реперных знаков на опоре,
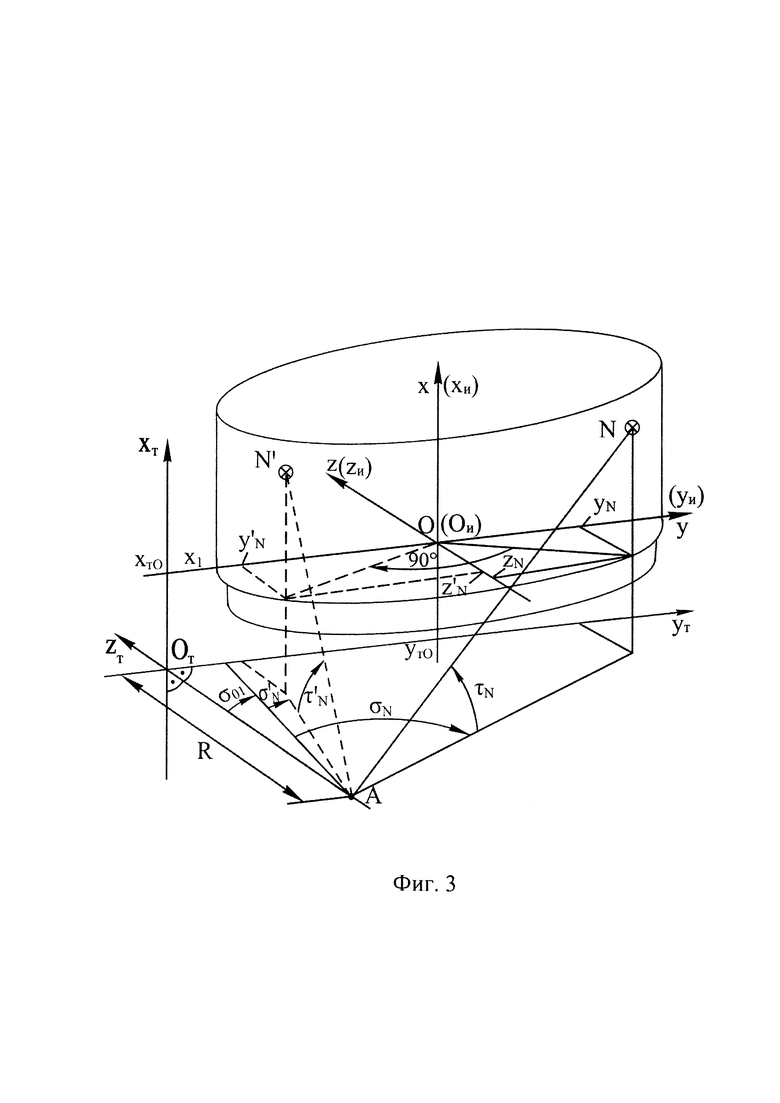
- на фиг.2 - схема определения координат целевой точки М,
- на фиг.3 - схема определения координат целевой точки N.
На рисунке фиг.1 показана опора 1, содержащая базовые штифты 2 - ш1, ш2, ш3, концы которых выполнены в виде конических заострений, при этом вершины конусов используются в качестве контрольных реперных знаков ш1(x1,y1,z1), ш2(x2,y2,z2), ш3(х3,у3,z3), координаты которых в системе координат Oxyz опоры известны. В данной иллюстрации способа с целью упрощения математического аппарата расчетов и технологичности реализации способа реперные знаки ш1(x1,y1,z1), ш2(х2,у2,x2) выполнены в плоскости хОу системы координат опоры (что в общем случае является необязательным). При этом координаты реперных знаков будут иметь значения ш1(x1,y10), ш2(х2,у2,0), ш3(х3,у3,z3), как показано на рисунке фиг.1. Измеряемое изделие 3 (показано пунктиром) устанавливают на грузоприемную плоскость опоры и базируют по штифтам ш1, ш2, ш3 посредством комплементарных этим штифтам отверстий в изделии, с которыми связана система координат изделия Оихиуиzи. Таким образом обеспечивается однозначное фиксирование системы координат изделия в системе координат опоры Oxyz.
Измерения углов показаны в системе координат теодолита Отxтутzт, построенной из условий: плоскость хтОтут совпадает с плоскостью хОу, ось Oтzт проходит через центр теодолита А (точку пересечения вертикальной оси поворота алидады и горизонтальной оси поворота визирной трубки). Расстояние от точки А до плоскости хОу (длина перпендикуляра из точки А на плоскость хОу) обозначено символом R.
Для иллюстрации измерений на изделии показаны целевые точки, в качестве которых используются реперные знаки М и N в виде кружков с перекрестиями, геометрические параметры которых в системе координат изделия требуется бесконтактно измерить (в том числе их координаты, размер соединяющего отрезка и его наклон).
На фиг.2 схематично показано определение координат целевой точки М. Пунктиром показаны измерения горизонтального и вертикального углов до точки М', в положение которой приходит точка М после поворота изделия на 90° (против часовой стрелки при виде сверху) вокруг оси Ох. Аналогично показано определение координат целевой точки N на фиг.3.
Предлагаемый способ реализуется следующим образом.
Теодолит размещают на минимально возможном расстоянии от объекта измерений, с учетом максимального измеряемого теодолитом вертикального угла, ограниченного наклоном визирной трубки - не более 45°, и проводят его штатное горизонтирование. Центр теодолита на рисунке фиг.1 показан в точке А. Визирный луч теодолита направляют на один из контрольных реперных знаков, например, знак ш1(x1,y10), и обнуляют показание горизонтального угла. От нуля теодолита измеряют горизонтальные углы σ12, σ13 до реперных знаков ш2(х2,у20) и ш3(х3,у3,z3). От горизонта теодолита измеряют вертикальный угол τ1 до реперного знака ш1(x1,y10). Значения измеренных углов подставляют в систему уравнений:

где
R - неизвестная длина перпендикуляра из центра А теодолита на плоскость хОу;
σ01 - неизвестный горизонтальный угол между перпендикуляром R и направлением на знак ш1.
Система (1), содержащая трансцендентные тригонометрические функции, решается в численном виде с применением ЭВМ. Из системы (1) определяются неизвестные R и σ01.
Координаты начала О системы координат опоры Oxyz, в системе координат теодолита Отxтyтzт определяются по формулам:

Измеряемое изделие 3 устанавливают на грузоприемную плоскость опоры и базируют по штифтам ш1, ш2, ш3. От нуля горизонтального угла теодолита (направления на реперный знак ш1(x1,y10)) измеряют горизонтальный угол σМ до целевой точки М. От горизонта теодолита измеряют вертикальный угол τМ до целевой точки М, как показано на рисунке фиг.2. После этого изделие поворачивают вокруг оси Ох на 90°, так, чтобы точка М оставалась в зоне видимости теодолита (в данном случае - против хода часовой стрелки при виде сверху). Точка М приходит в положение М'. Измеряют горизонтальный σ'М и вертикальный τ'M углы до точки М'. Данные измерений углов подставляют в систему геометрических соотношений:
Система (3), содержащая трансцендентные тригонометрические функции, решается в численном виде с применением ЭВМ. Из системы (3) определяются неизвестные координаты хМ, yM и zM.
Аналогично определению координат целевой точки М определяются координаты целевой точки N, рисунок на фиг.3. В начальном положении измеряют горизонтальный σN и вертикальный τN углы до точки N, затем изделие поворачивают вокруг оси Ох на 90°, так, чтобы точка N оставалась в зоне видимости теодолита (в данном случае - по ходу часовой стрелки при виде сверху). Точка N приходит в положение N'. Измеряют горизонтальный o'n и вертикальный σ'N углы до точки N'. Данные измерений углов подставляют в систему геометрических соотношений:
Система (4), содержащая трансцендентные тригонометрические функции, решается в численном виде с применением ЭВМ. Из системы (4) определяются неизвестные координаты xN, yN и zN.
После определения координат целевых точек М(хМ,yM,zM) и N(xN,yN,zN) вычисляются связанные с ними геометрические параметры в системе координат изделия по стандартным формулам аналитической геометрии. В частности, расстояние d от точки М до точки N вычисляется по формуле:

Угол ε наклона отрезка MN к плоскости хиОиуи вычисляется по формуле:

В частном случае, если перед измерениями стоит задача определить геометрические параметры только в плоскости хОу, то повороты изделия на 90° для дополнительных измерений углов σ'М и σ'N не требуются, измерения углов σM, τM, σN, τN выполняют в одной позиции изделия, а вместо алгоритма (3)-(6) проводят расчеты по формулам:
Таким образом, предлагаемый способ измерения геометрических параметров с применением теодолита по сравнению с наиболее близким аналогом имеет более широкую область применения, так как он позволяет измерять геометрические параметры в системах координат изделий машиностроения, а также обладает более высокой точностью измерений в связи с тем, что в нем более точно определяется длина перпендикуляра (расстояние до объекта измерений) от центра теодолита до фронтальной к теодолиту вертикальной плоскости, заданной расположением контрольных реперных знаков.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
| СПОСОБ РАЗМЕРНОГО КОНТРОЛЯ КРУПНОГАБАРИТНОГО ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2096741C1 |
| Способ измерения дальности от маневрового тепловоза до вагона на прямолинейном участке железнодорожного пути | 2020 |
|
RU2750364C1 |
| СПОСОБ ИЗМЕРЕНИЯ УЧЕТНОГО ДЕРЕВА | 2002 |
|
RU2224418C1 |
| Способ горизонтирования системы координат угломерного прибора по двум опорным точкам | 2024 |
|
RU2832842C1 |
| СПОСОБ ГРАДУИРОВКИ РЕЗЕРВУАРА ДЛЯ ОПРЕДЕЛЕНИЯ ВМЕСТИМОСТИ, СООТВЕТСТВУЮЩЕЙ ВЫСОТЕ ЕГО НАПОЛНЕНИЯ | 2010 |
|
RU2442112C1 |
| СПОСОБ КОМПЛЕКТОВАНИЯ ШАРИКОВЫХ МЕХАНИЗМОВ | 2009 |
|
RU2392511C1 |
| Способ юстировки фотокамер | 1979 |
|
SU949620A1 |
| Способ разметки деталей приварного насыщения на поверхности в помещении судна | 1990 |
|
SU1795282A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2468383C1 |
Изобретение относится к измерительной технике и может быть использовано для бесконтактных измерений геометрических параметров изделий в машиностроении, геодезии и строительстве. Сущность предлагаемого способа измерения геометрических параметров объекта заключается в следующем. Изделие устанавливают на опору, в системе координат которой фиксируется система координат изделия и положение реперных знаков. При этом за вычисляемое расстояние принимают длину перпендикуляра, опущенного из центра теодолита на фронтальную плоскость системы координат опоры. Измеряют горизонтальные и вертикальные углы направлений линии визирования теодолита на целевые точки на изделии. По результатам измерений углов и определенному положению центра теодолита в системе координат опоры рассчитывают координаты целевых точек в системе координат изделия. По рассчитанным координатам целевых точек рассчитывают геометрические параметры изделия. Техническим результатом заявленного изобретения является расширение области применения и повышение точности измерений. 3 ил.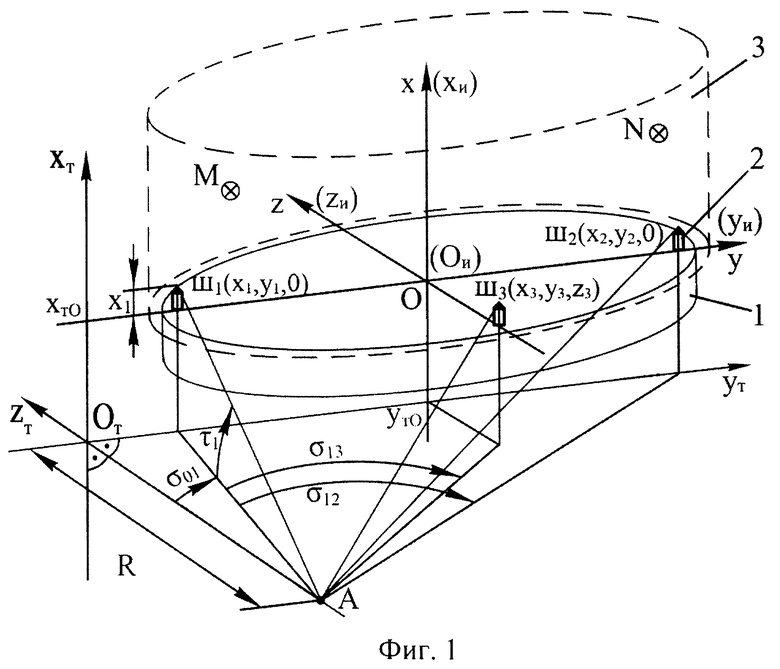
Способ измерения геометрических параметров объекта с применением теодолита, в котором измеряют горизонтальные и вертикальные углы направлений линии визирования теодолита на контрольные реперные знаки, по значениям измеренных углов и известному взаимному положению реперных знаков вычисляют расстояние до объекта измерений и геометрические параметры, связанные с целевыми точками объекта измерений, отличающийся тем, что положение реперных знаков фиксируют в системе координат опоры для установки измеряемого изделия, за вычисляемое расстояние до объекта измерений принимают длину перпендикуляра, опущенного из центра теодолита на фронтальную плоскость системы координат опоры, на опору устанавливают измеряемое изделие, систему координат которого фиксируют в системе координат опоры, измеряют горизонтальные и вертикальные углы между направлением на основание перпендикуляра и направлениями на заданные целевые точки на измеряемом изделии, по значениям измеренных углов и длине перпендикуляра расчетом определяют координаты целевых точек, по которым рассчитывают геометрические параметры, заданные целевыми точками в системе координат изделия.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ СКРЫТЫХ КОНТРОЛЬНЫХ ТОЧЕК ПРИ ИЗМЕРЕНИИ ОТКЛОНЕНИЙ ОТ КРУГОВОЙ ФОРМЫ СЕЧЕНИЙ КОРПУСОВ ЦИЛИНДРИЧЕСКИХ ВСТАВОК СУДОВ ИЛИ ПОДВОДНЫХ ЛОДОК | 2014 |
|
RU2575593C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
| СПОСОБ ДИСТАНЦИОННО-НЕКОНТАКТНОГО ОПРЕДЕЛЕНИЯ УРОВНЯ СРЕДЫ В РЕЗЕРВУАРЕ | 2001 |
|
RU2208768C2 |
| СПОСОБ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ ОБЪЕМНЫХ ОБЪЕКТОВ ПО ЗАДАННЫМ СВЕТОВЫМ МАРКАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079810C1 |
| CN 111678433 A, 18.09.2020. | |||

