Изобретение относится к области технической механики, машиностроения, измерительной техники и может быть использовано для определения положения центра тяжести массивных изделий подвешиванием при помощи подъемного устройства (траверсы).
Важнейшей характеристикой объектов транспортного, автомобильного производства и судостроения, влияющей на устойчивость во время совершения маневров, плавучие свойства, летные характеристики, является положение их центра тяжести.
Существуют способы определения центра тяжести массивных изделий (машин) с применением погрузочной оснастки и подъемных устройств.
Известен способ определения массы и пространственного положения центра тяжести объекта с помощью подъемного устройства, содержащего неподвижный подвес и, по меньшей мере, три стропы для связи подвеса с объектом испытаний [1]. Процесс включает в себя следующие этапы:
а) подвешивание объекта по меньшей мере тремя стропами к подвесу;
б) ориентация объекта по меньшей мере в двух разных пространственных положениях;
в) измерение ориентации объекта в каждом пространственном положении;
г) измерение сил натяжения строп под тяжестью объекта испытаний в каждом из пространственных положений;
д) определение линий действия сил тяжести для каждого из положений из условий равновесия статики;
е) определение пространственного положения центра тяжести на пересечении линий действия силы тяжести.
Известен также способ определения положения центра тяжести массивных изделий, принятый в качестве прототипа, заключающийся в двукратном подвешивании изделия с разной пространственной ориентацией и применением дополнительного подвижного подвеса в виде траверсы, при этом в поднятом состоянии измерительная система принимает равновесное состояние совместным наклоном подвеса и изделия, затем математически вычисляют координаты ХС, YC, ZC центра тяжести изделия в зависимости от параметров положения и массогеометрических параметров элементов измерительной системы в равновесных состояниях, обеспечиваемых попарным изменением длины строп между подвешиваниями. Массогеометрические параметры элементов измерительной системы включают: размеры подвеса аТ, bТ, НТ; длины строп 11 и 12; массу подвеса mТ, координату его центра тяжести zCT; массу изделия m; расстояния между точками крепления строп к изделию L и В; координаты трех произвольно выбранных точек N, Р, Q нижней поверхности изделия в системе координат изделия xN, yN, zN, хР, уР, zP, xQ, yQ, zQ; при этом параметры положения элементов измерительной системы включают высоту hNi, hPi, hQi, над уровнем пола, по меньшей мере, трех произвольных точек поверхности изделия после подъема и самоустановки системы в i равновесном состоянии; вычисляемые углы ориентации изделия при i подвешивании γix, γiy, γiz в зависимости от значений высоты hNi, hPi, hQi; вычисляемые силы натяжения в стропах при i подвешивании в проекции на координатные оси T1ix, T1iy, T1iz, T2ix, T2iy, T2iz, T3ix, T3iy, T3iz, T4ix, T4iy, T4iz; вычисляемые углы ориентации подвеса γTix, γTiy, γTiz. [2].
Прототип обладает следующими недостатками.
Непосредственное измерение высоты точек нижней поверхности массивного объекта, подвешенного над уровнем пола, вручную небезопасно для исполнителей, а автоматизация процесса измерения затруднена: требуются ряд особых датчиков положения относительно начала координат, с предварительной установкой и индивидуальной выверкой для каждого объекта испытаний.
Аналитическая обработка результатов измерений обладает чрезмерной сложностью. Поскольку углы ориентации изделия, являющиеся основными параметрами для определения центра тяжести, определяются косвенными измерениями через высоты трех точек над уровнем пола, математическая модель равновесия измерительной системы в каждом из двух состояний содержит дополнительные параметры и, следовательно, дополнительные условия связи с основными параметрами для замыкания системы уравнений.
Техническим результатом применения заявляемого способа является повышение безопасности и упрощение процесса определения центра тяжести изделия.
Указанный технический результат достигается тем, что в способе определения центра тяжести изделия подвешиванием по положению траверсы, заключающемся в двукратном подвешивании изделия на подвижном подвесе в виде траверсы посредством четырех строп попарно разной длины с образованием двух разных пространственных ориентаций изделия за счет попарного изменения длин строп между подвешиваниями, ориентацию изделия в каждом пространственном положении измерительной системы определяют путем математического вычисления углов ориентации изделия вычислительным устройством в зависимости от углов ориентации траверсы, которые получают с установленных на траверсе датчиков углового положения, затем вычисляют координаты центра тяжести изделия.
Безопасность процесса определения центра тяжести изделия подвешиванием на траверсе обеспечивается за счет автоматизации измерения углов ориентации траверсы с предварительно установленными на ней датчиками углового положения и передачей информации об углах на вычислительное устройство, либо удаленный от зоны испытаний индикатор. Автоматизация измерений исключает непосредственное измерение исполнителем параметров ориентации изделия ручными средствами и его нахождение в процессе измерений в опасной зоне под подвешенным изделием, либо в опасной близости от него.
Упрощение процесса определения центра тяжести изделия подвешиванием на траверсе обеспечивается переходом с косвенных измерений ориентации элементов измерительной системы через высоту трех точек над уровнем пола на непосредственные прямые измерения углов датчиками угловых положений, что позволяет:
- уменьшить число переменных и их взаимосвязей в расчете координат центра тяжести и, соответственно, снизить объем требующихся вычислительных ресурсов для обработки результатов измерений вычислительным устройством;
- сократить количество измеряемых параметров (для прототипа требуется измерить три линейных параметра для каждого из двух подвешиваний, для заявляемого способа достаточно измерить два угловых параметра для каждого из двух подвешиваний).
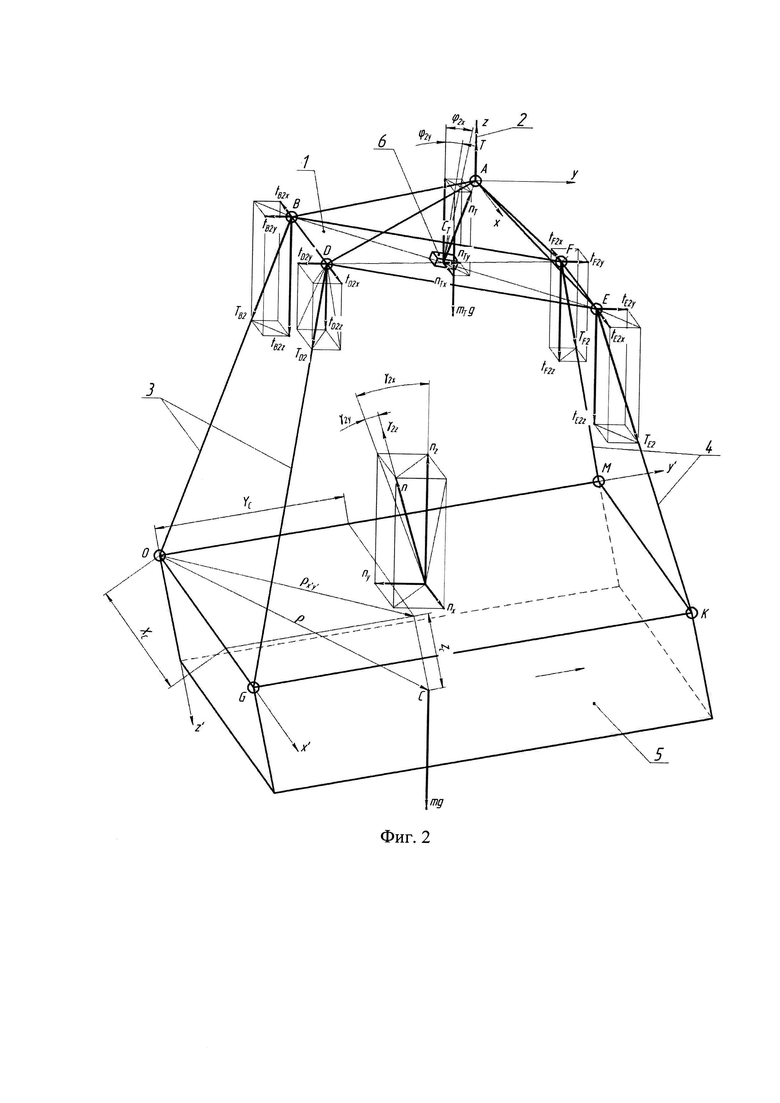
Способ поясняется рисунками и формулами. На фиг. 1 и 2 схематически изображена измерительная система при первом и втором подвешиваниях соответственно.
Центр тяжести СT сбалансированной грузовой траверсы 1 известных размеров bT, аT, НT и известной массы mT находится на перпендикуляре, опущенном из точки ее крепления к тяговому тросу 2 подъемного устройства (крана) на известном расстоянии ZCT от точки А. Стропы 3 длиной l1 и 4 длиной l2 связывают траверсу с объектом испытаний известной массы m. Одним концом стропы закреплены на углах траверсы, другим - на элементах крепления объекта испытаний, причем точки крепления строп к объекту располагаются в одной плоскости на расстоянии L и В соответственно в продольном и поперечном направлениях. Система «траверса - стропы - объект испытаний» в подвешенном состоянии самопроизвольно принимает равновесное положение взаимосвязанным поворотом ее элементов, причем траверса поворачивается вокруг точки А, которую примем началом глобальной системы координат. Ориентация траверсы в j равновесном положении (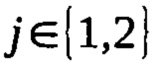 ), определяется углами ϕjx и ϕjy, которые регистрируются закрепленным на траверсе двухканальным датчиком 6, либо двумя одноканальными датчиками, сигналы с датчиков передаются на цифровое вычислительное устройство, содержащее программу вычисления центра тяжести.
), определяется углами ϕjx и ϕjy, которые регистрируются закрепленным на траверсе двухканальным датчиком 6, либо двумя одноканальными датчиками, сигналы с датчиков передаются на цифровое вычислительное устройство, содержащее программу вычисления центра тяжести.
Координаты узловых точек траверсы в каждом положении в глобальной системе координат определяются при помощи формулы пространственного поворота, имеющей матричный вид [3]
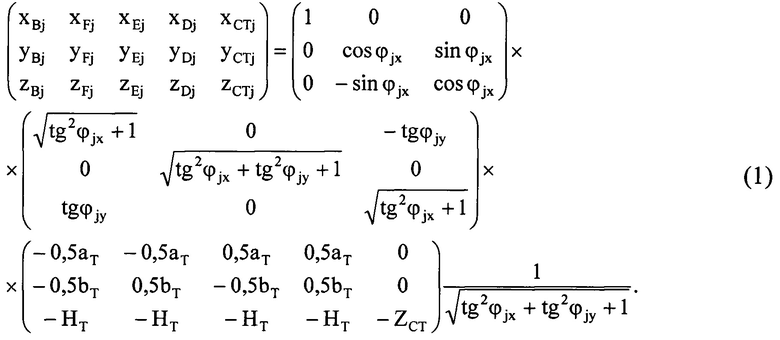
Углы поворота объекта измерений при j подвешивании в собственной системе координат γjx, γjy, γjz определяются из условий равновесия статики траверсы совместно с условиями замкнутости геометрически изменяемых пространственных многоугольников BOGD, ВОКЕ и BOMF
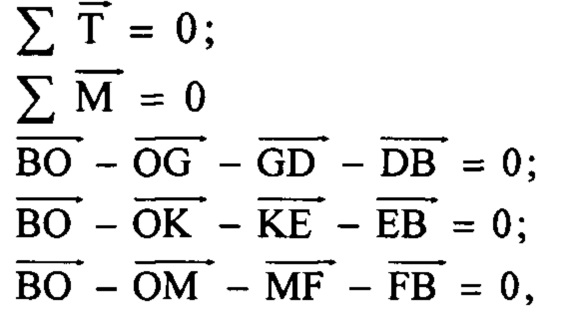
которые в проекции на три координатные оси Ах, Ау и Az образуют 15 уравнений. Полученная система уравнений замыкается матричным уравнением поворота объекта испытаний относительно точки О и имеет вид
где Т - сила натяжения тягового троса подъемного устройства; i∈{B,F,E,D}; xMj, УMj, zMj, xKj, yKj, zKj, xGj, yGj, zGj - координаты точек крепления строп к объекту испытаний в j равновесном положении в системе координат, параллельной глобальной с началом в точке О; tijk - k координата вектора силы натяжения Тij,  ; J - продольная податливость строп, Н-1 (
; J - продольная податливость строп, Н-1 ( , где ε - относительное удлинение стропы, Т - сила натяжения).
, где ε - относительное удлинение стропы, Т - сила натяжения).
В начале система (2) решается для первого подвешивания при j=1 относительно неизвестных хi1k, у1k, хМ1, уM1, zM1, хК1, уК1, zK1, xG1, yG1, zG1, затем для второго подвешивания при j=2 относительно неизвестных ti2k, γ2k, xМ2, уМ2, zM2, xК2, уК2, zК2, XG2, yG2, zG2.
Полученные углы ориентации yjk позволяют определить координаты центра тяжести объекта испытаний из моментных уравнений равновесия всей измерительной системы при двух подвешиваниях относительно осей Ах и Ау.

где  - сумма моментов сил тяжести элементов измерительной системы относительно к оси при j подвешивании.
- сумма моментов сил тяжести элементов измерительной системы относительно к оси при j подвешивании.
Для определения координат центра тяжести объекта достаточно взять три уравнения из четырех: два относительно оси х и любое относительно оси у и дополнить уравнениями связи координат центра тяжести объекта в двух системах координат: собственной и повернутой относительно начала в положение параллельное глобальной системе, например
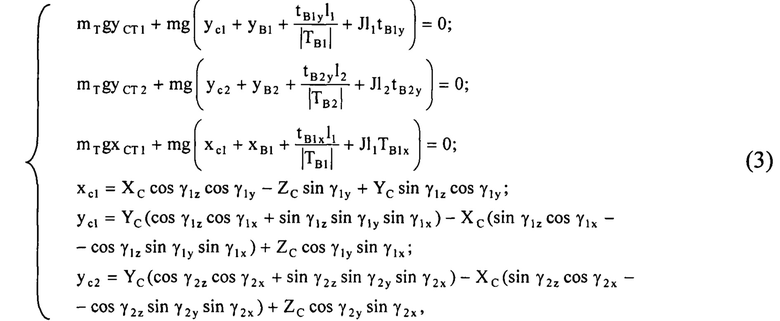
либо
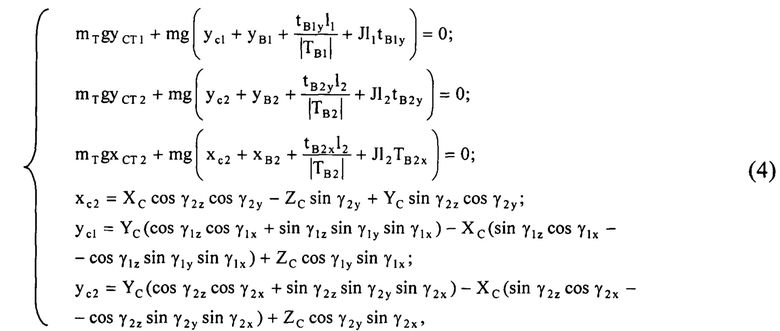
где ХC, YC, ZC - искомые координаты центра тяжести объекта в собственной системе координат Ox'y'z'; xcj ycj - координаты центра тяжести объекта в системе координат, параллельной глобальной с началом в точке О для j подвешивания.
Решение системы уравнений (3) относительно ХC, YC, ZC, хс1, ус1, ус2, или (4) относительно ХC, YC, ZC, хc2, yc1, уc2 позволяет определить положение центра тяжести объекта испытаний.
Практическая часть способа определения центра тяжести изделия подвешиванием по положению траверсы включает следующие действия:
1. Выполнить подготовительные операции: сбалансировать траверсу (в свободном подвешенном состоянии траверса должна принимать горизонтальное положение), закрепить и выверить на траверсе датчик(и) углового положения.
2. До испытания объекта измерить размеры грузовой траверсы аT, bT, НT, ее массу mT, массу изделия m, длины строп l1 и l2, расстояние между точками крепления строп к изделию В и L, определить продольную податливость строп J.
3. Собрать измерительную систему. Тяговый трос подъемного устройства соединить с траверсой. Траверсу и объект испытаний соединить стропами согласно фиг. 1.
4. Поднять измерительную систему. В равновесном положении получить показания датчиков ϕх1, ϕУ1.
5. Опустить систему и поменять местами пары строп разной длины согласно фиг. 2.
6. Осуществить повторный подъем измерительной системы. В равновесном положении получить показания датчиков ϕx2, ϕу2.
7. Определить центр тяжести объекта испытаний с помощью цифрового вычислительного устройства.
8. Опустить систему.
Аналитическая часть способа включает в себя последовательность следующих операций:
1. Расчет координат узловых точек траверсы по формулам (1) в зависимости от показаний датчиков углового положения траверсы каждого подвешивания ϕxj, ϕyj.
2. Решение системы (2) для первого подвешивания относительно неизвестных ti1k, ylk, хМ1, уМ1, zM1, хK1, уK1, zK1, xG1, уG1, zG1.
3. Решение системы (2) для второго подвешивания относительно неизвестных ti2k, γ2k, хМ2, уM2, zM2, xK2, уK2, zK2, xG2, yG2, zG2.
4. Определение центра тяжести объекта решением системы (3) относительно неизвестных относительно XC, YC, ZC, хс1, ус1, ус2, либо (4) относительно ХC, YC, ZC, хс2, ус1, ус2.
Поскольку действительные длины строп будут отличаться в пределах допуска на их изготовление, что внесет некоторую погрешность в распределение нагрузки по элементам измерительной системы и, соответственно, повлияет на точность определения центра тяжести, предлагается вариант способа определения центра тяжести без необходимости соблюдать равенство длин строп. Для этого используются три стропы, две из которых разной, но близкой длины, а третья разложена еще на две и представляет собой блочную систему, состоящую из одной стропы, закрепленную обоими концами к объекту и перекинутую через катушку-блок, расположенную на конце другой стропы, спускающейся с траверсы.
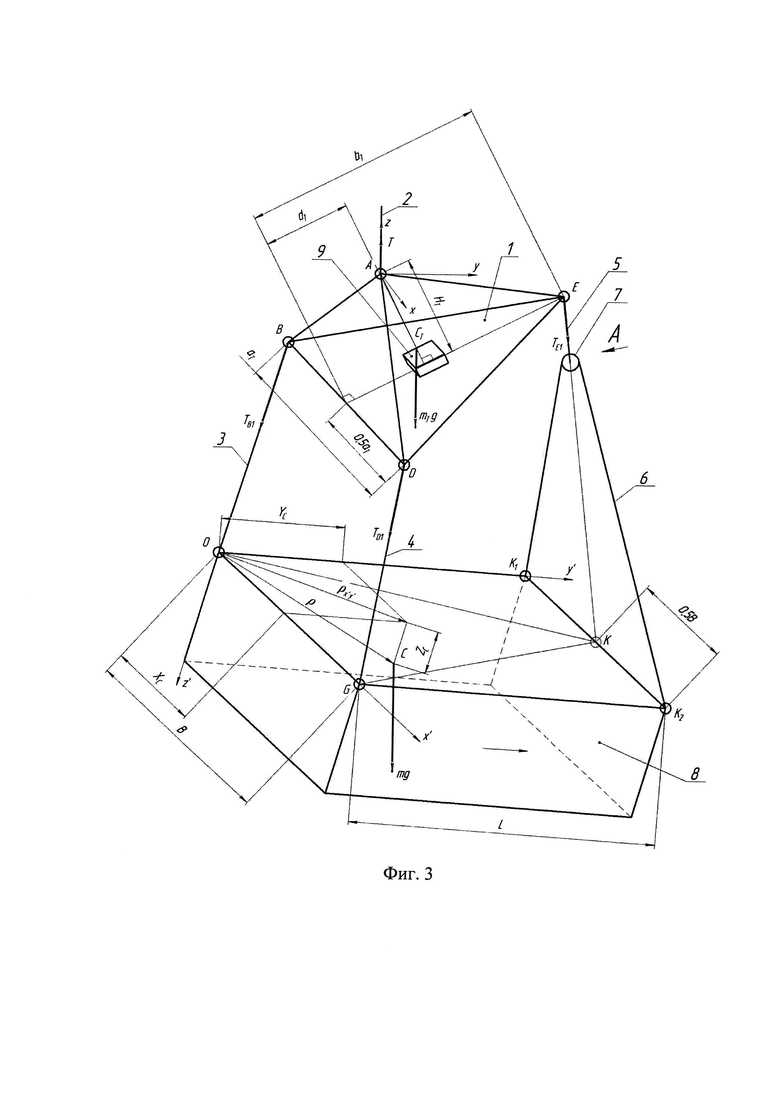
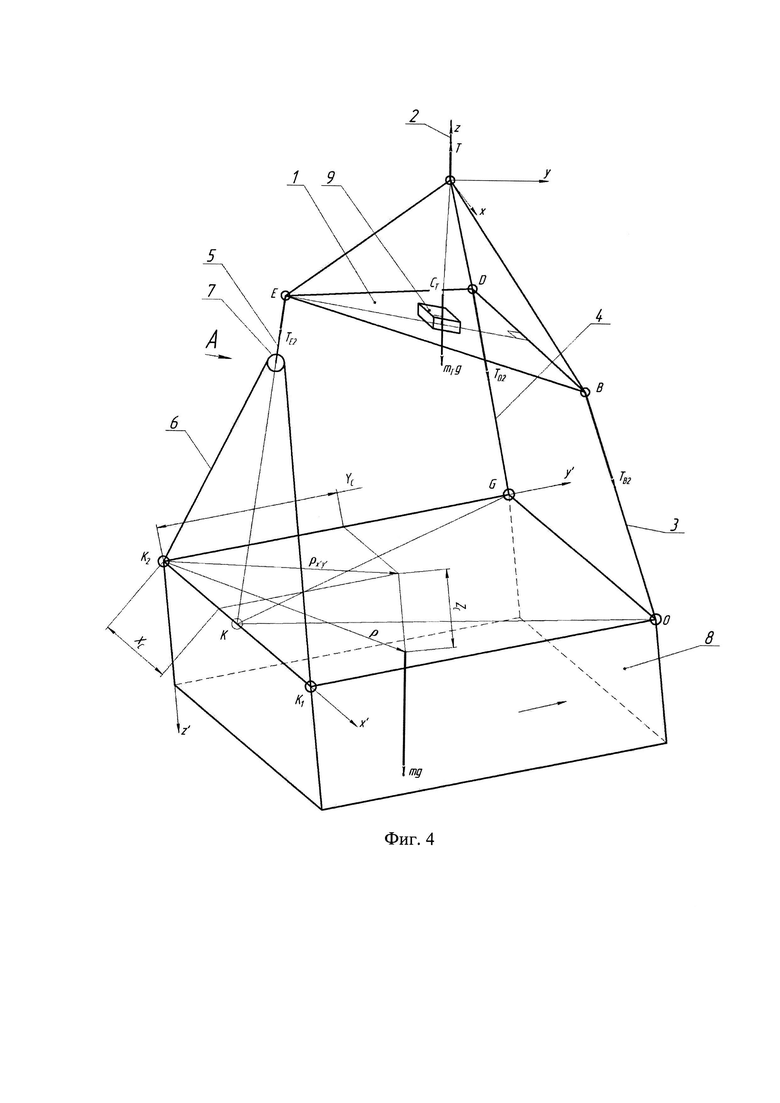
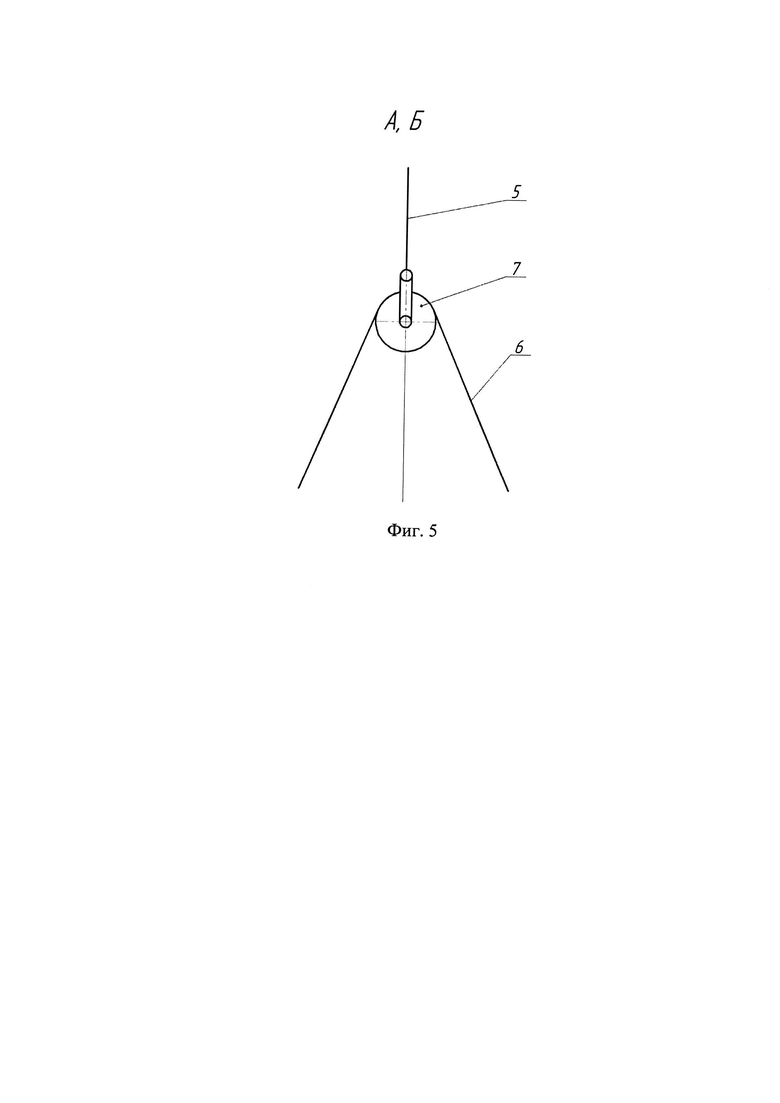
Вариант измерительной системы изображен на фиг. 3, 4 и 5.
Сбалансированная траверса 1, на которой закреплен датчик углового положения 9, имеет известную массу mT и конфигурацию. Центр тяжести траверсы СT находится на перпендикуляре к плоскости траверсы, опущенном из точки А на расстоянии НT от точки крепления тягового троса А, причем точка пересечения перпендикуляра с плоскостью траверсы принадлежит высоте равнобедренного треугольника, образованного точками Е, В, D крепления строп, соединяющих траверсу с объектом испытаний 8, и располагается на известном расстоянии dT от основания BD. Известна высота треугольника bT и длина основания аT.
К узловым точкам траверсы В, D в основании равнобедренного треугольника крепятся стропы 3 и 4 длинами l1 и l2 соответственно. К точке Е, в которой сходятся плечи равнобедренного треугольника, крепится стропа 5 длиной l3, на конце которой выполнена катушка - блок 7. Через катушку-блок перекинута стропа 6, длиной l4, закрепленная обоими концами к объекту испытаний 8 в точках K1 и K2, причем линия стропы 5 пересекает объект испытаний в точке К. Таким образом, объект испытаний имеет две постоянные связи с траверсой (стропы 3 и 4) и одну самоустанавливающуюся связь ЕK, разбитую на две - EK1 и ЕK2.
Первое подвешенное состояние измерительной системы изображено на фиг. 3. Для получения второго подвешенного состояния выполняется разворот траверсы в горизонтальной плоскости на 180° относительно объекта испытаний (фиг. 4).
Координаты узловых точек траверсы в каждом j подвешенном состоянии определяются в зависимости от углов ориентации траверсы, зафиксированных датчиком, по формуле
где в случаях ±, μ верхний знак берется при j=1; нижний - при j=2.
Система уравнений для определения углов ориентации объекта испытаний при j подвешивании без учета продольной податливости строп для данного варианта имеет вид
Координаты центра тяжести объекта определяются решением системы уравнений
Источники информации:
1. Патент ЕР 2137503 A1 Verfahren zur bestimmung von massenschwerpunkten bei grossstrukturen, 2009.12.30.
2. Патент RU 2721158 C1 Способ определения положения центра тяжести массивных изделий, 18.05.2020.
3. Справочник по высшей математике / М.Я. Выгодский. - М.: ООО «Большая медведица», 2000. - 863 с.: ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения положения центра тяжести массивных изделий | 2019 |
|
RU2721158C1 |
| Способ определения положения центра тяжести массивных и крупногабаритных объектов сложной формы | 2022 |
|
RU2809111C1 |
| Стенд для измерения массы, координат центра масс и моментов инерции изделий | 2024 |
|
RU2830397C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| МНОГОЛУЧЕВАЯ НЕАПЛАНАТИЧЕСКАЯ ГИБРИДНАЯ ЗЕРКАЛЬНАЯ АНТЕННА | 2001 |
|
RU2181519C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЙ | 2013 |
|
RU2525629C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2325666C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
| СПОСОБ ОПТИМАЛЬНОГО РАЗМЕЩЕНИЯ И ОРИЕНТАЦИИ ПРИЕМНОГО/ПЕРЕДАЮЩЕГО ИЗЛУЧАТЕЛЯ В ВИДЕ КОАКСИАЛЬНО РАСПОЛОЖЕННЫХ ДИЭЛЕКТРИКОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ В ФОКАЛЬНОЙ ОБЛАСТИ ИСПОЛЬЗУЕМЫХ КОЛЛИМИРУЮЩИХ ПОВЕРХНОСТЕЙ | 2011 |
|
RU2461929C1 |
Изобретение относится к измерительной технике. Способ определения центра тяжести изделия подвешиванием по положению траверсы заключается в двукратном подвешивании изделия на подвижном подвесе в виде траверсы. Подвешивают изделие посредством четырех строп попарно разной длины с образованием двух разных пространственных ориентаций изделия за счет попарного изменения длин строп между подвешиваниями, или двух строп близкой длины и блочной системы. Блочная система состоит из одной стропы, закрепленной обоими концами к изделию и образующей петлю, перекинутую через катушку-блок. Катушка-блок установлена на конце другой стропы, закрепленной на траверсе. Разные пространственные ориентации изделия при подъеме осуществляют разворотом траверсы с закрепленными на ней стропами на 180 градусов в горизонтальной плоскости относительно снятого между подвешиваниями изделия. Определяют ориентацию изделия в каждом пространственном положении измерительной системы путем математического вычисления углов ориентации изделия вычислительным устройством в зависимости от углов ориентации траверсы. Углы получают с установленных на траверсе датчиков углового положения. Затем вычисляют координаты центра тяжести изделия. Достигается повышение безопасности и упрощение процесса определения центра тяжести изделия. 5 ил.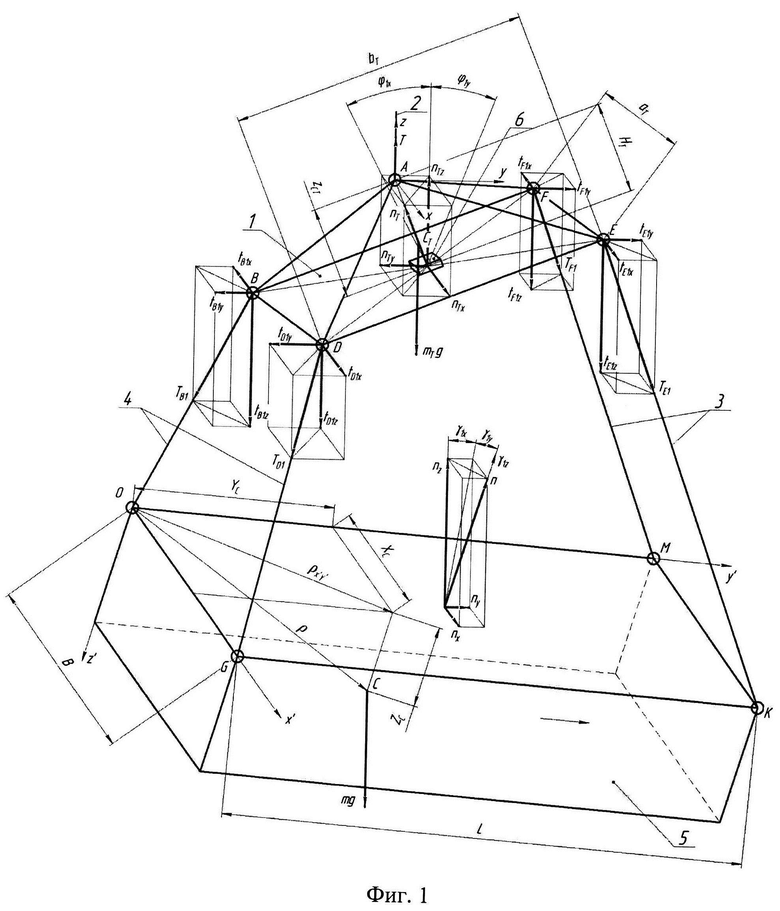
Способ определения центра тяжести изделия подвешиванием по положению траверсы, заключающийся в двукратном подвешивании изделия на подвижном подвесе в виде траверсы посредством четырех строп попарно разной длины с образованием двух разных пространственных ориентаций изделия за счет попарного изменения длин строп между подвешиваниями, или двух строп близкой длины и блочной системы, состоящей из одной стропы, закрепленной обоими концами к изделию и образующей петлю, перекинутую через катушку-блок, установленную на конце другой стропы, закрепленной на траверсе, а разные пространственные ориентации изделия при подъеме осуществляются разворотом траверсы с закрепленными на ней стропами на 180 градусов в горизонтальной плоскости относительно снятого между подвешиваниями изделия, отличающийся тем, что определяют ориентацию изделия в каждом пространственном положении измерительной системы путем математического вычисления углов ориентации изделия вычислительным устройством в зависимости от углов ориентации траверсы, которые получают с установленных на траверсе датчиков углового положения, затем вычисляют координаты центра тяжести изделия.
| Способ определения положения центра тяжести массивных изделий | 2019 |
|
RU2721158C1 |
| СТРОПОВЫЙ ПОДВЕС | 2012 |
|
RU2520681C1 |
| Способ определения центра тяжести груза и устройство для его осуществления | 1986 |
|
SU1404431A1 |
| US 8701472 B2, 22.04.2014 | |||
| WO 2014064966 A1, 01.05.2014. | |||

