Изобретение относится к измерительной технике в машиностроении и может быть использовано для определения положения центра тяжести массивного изделия подвешиванием при помощи подъемного устройства.
Известно, что одной из важнейших характеристик объектов транспортного, автомобильного производства и судостроения является положение их центра тяжести. Положение центра тяжести влияет на плавучие свойства суден, летные характеристики воздушных транспортных средств, устойчивость автомобилей при совершении маневров на трассе, распределение нагрузок на несущие элементы конструкции и т.д.
Для упрощения испытаний массивных изделий (машин) на предмет определения положения их центра тяжести, целесообразно применять способы с возможностью использования погрузочной оснастки и подъемных устройств.
Известен способ определения массы и пространственного положения центра тяжести объекта с помощью подъемного устройства (Патент ЕР 2137503 А1 Метод определения центров масс в крупных объектах, 30.12.2009), содержащий неподвижный подвес и, по меньшей мере, две стропы для связи подвеса с объектом испытаний, принятый в качестве прототипа. Процесс испытаний включает в себя следующие этапы:
а) подвешивание объекта, по меньшей мере, двумя стропами к подвесу;
б) ориентация объекта, по меньшей мере, в двух разных пространственных положениях;
в) измерение ориентации объекта в каждом пространственном положении;
г) измерение сил натяжения строп под тяжестью объекта испытаний в каждом из пространственных положений;
д) определение линий действия сил тяжести для каждого из положений из условий равновесия статики;
е) определение пространственного положения центра тяжести на пересечении линий действия силы тяжести.
Известный способ обладает следующими недостатками. Для реализации известного способа требуется наличие достаточно сложного неподвижного подвеса с функцией подъема испытываемого объекта на высоту в разных пространственных положениях. Способ требует использования дополнительных силоизмерительных средств для определения сил натяжения в стропах.
Целью изобретения является создание технически простого способа определения положения центра тяжести массивных изделий тяжелого машиностроения двукратным подвешиванием с использованием погрузочной оснастки без применения дополнительных силоизмерительных средств.
Задачей заявляемого способа является упрощение определения положения центра тяжести массивных изделий и расширение области применения способа с возможностью использования универсальной погрузочной оснастки и подъемных устройств.
Указанный технический результат достигается тем, что способ определения положения центра тяжести массивных изделий заключается в двукратном подвешивании изделия с разной пространственной ориентацией и применением дополнительного подвижного подвеса в виде траверсы, при этом в поднятом состоянии измерительная система принимает равновесное состояние совместным наклоном подвеса и изделия, затем математически вычисляют координаты ХС, YC, ZC центра тяжести изделия в зависимости от параметров положения и массогеометрических параметров элементов измерительной системы в равновесных состояниях, обеспечиваемых попарным изменением длины строп между подвешиваниями.
Массогеометрические параметры элементов измерительной системы включают: размеры подвеса аТ, bT, НТ; длины строп l1 и l2; массу подвеса mT, координату его центра тяжести zCT; массу изделия m; расстояния между точками крепления строп к изделию L и В; координаты трех произвольно выбранных точек N, Р, Q нижней поверхности изделия в системе координат изделия xN, уN, zN, хР, уР, zP, xQ, yQ, zQ; при этом параметры положения элементов измерительной системы включают высоту hNi, hPi, hQi, над уровнем пола, по меньшей мере, трех произвольных точек поверхности изделия после подъема и самоустановки системы в i равновесном состоянии; вычисляемые углы ориентации изделия при i подвешивании γix, γiy, γiz в зависимости от значений высоты hNi, hPi, hQi; вычисляемые силы натяжения в стропах при i подвешивании в проекции на координатные оси T1ix, T1iy, T1iz, T2ix, T2iy, T2iz, T3ix, T3iy, T3iz, T4ix, T4iy, T4iz; вычисляемые углы ориентации подвеса γTix, γTiy, γTiz.
Способ определения положения центра тяжести изделий поясняется рисунками.
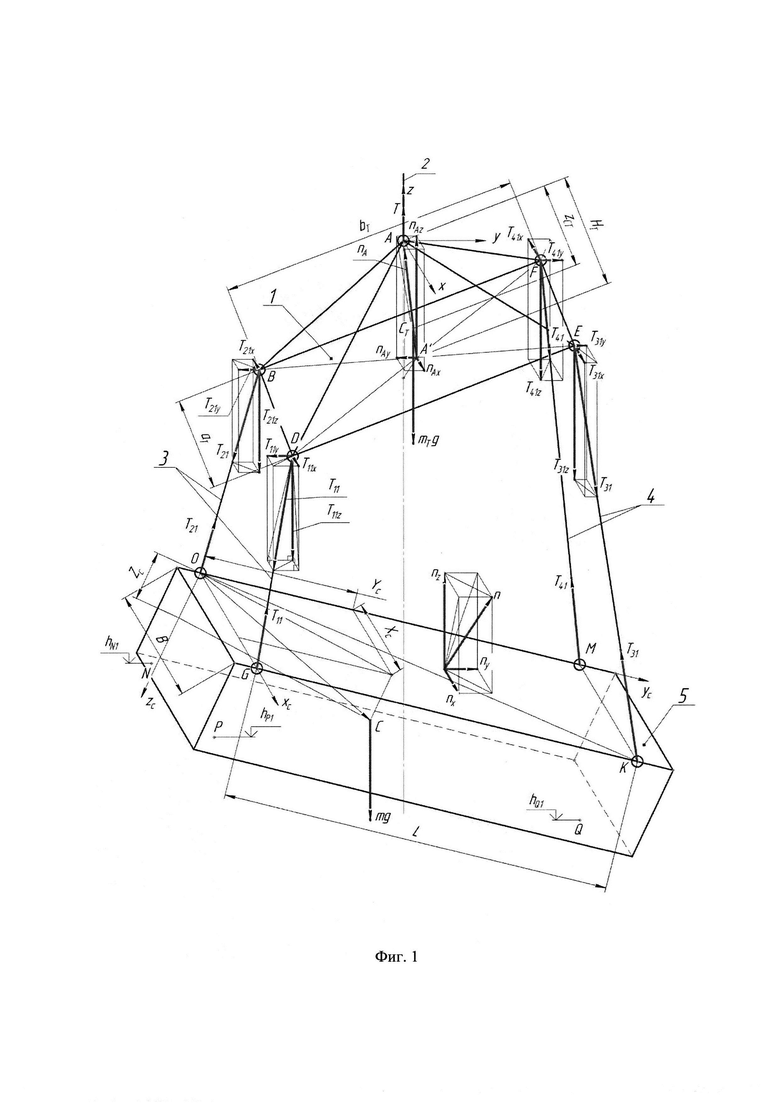
На Фиг. 1 схематически изображена измерительная система при первом подвешивании изделия.
Функцию подвеса выполняет грузовая траверса, закрепленная на тяговом тросе подъемного устройства на сферическом шарнире с возможностью поворота вокруг точки подвеса. При этом система траверса-стропы-объект является геометрически изменяемой и при подъеме обладает свойством самоустанавливаться в некоторое равновесное положение, зависящее от положений центров тяжести ее элементов: траверсы и изделия. Четыре стропы выполнены попарно разной длины, что позволяет при их попарной перемене местами между двумя подвешиваниями обеспечить получение двух различных установившихся равновесных положений измерительной системы. Координаты центра тяжести изделия определяются аналитически (математически) с помощью вычислителя по результатам измерений из условий равновесия статики с учетом геометрических закономерностей системы. При этом измерению подлежат только геометрические параметры положения измерительной системы, а силовые параметры определяются аналитическим путем.
Траверса 1 закреплена на тяговом тросе 2 подъемного устройства (крана). Стропы 3 длиной 11 и стропы 4 длиной 12 связывают траверсу с изделием и одним концом закрепляются на углах траверсы, а другим - на элементах крепления изделия, причем точки крепления строп к изделию располагаются в одной плоскости. При подъеме измерительной системы она самоустанавливается в некоторое равновесное положение, которое зависит от расположения центров тяжести траверсы СТ и изделия С. При этом ориентация траверсы и изделия в равновесном положении характеризуется углами их поворота относительно их собственных осей координат γхТ, γуТ, γzT и γх, γу, γz соответственно.
Углы ориентации изделия в подвешенном состоянии γх, γу, γz определяются либо прямыми измерениями, либо косвенно измерением высот трех произвольных точек нижней поверхности изделия над уровнем пола N, Р, Q, не лежащих на одной прямой. Разность высот точек N, Р, Q над уровнем пола равна разнице их высотных координат в установившемся равновесии, которые в свою очередь связаны с искомыми углами ориентации изделия известным уравнением преобразования координат при пространственных поворотах (2). Таким образом, математически углы γх, γу, γz определяются из системы уравнений (1).
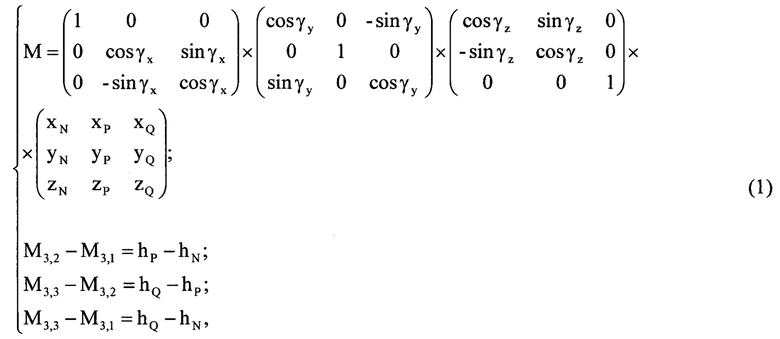
где xN, уN, zN, хР, уР, zP, xQ, yQ, zQ - координаты точек N, P, Q в системе координат изделия xCyCzC; hN, hP, hQ - высота точек N, P, Q в поднятом состоянии над уровнем пола, полученная измерением. При известных значениях высот точек N, Р, Q над уровнем пола в первом равновесном положении hN1, hP1, hQ1 из системы (1) определяются углы γx1, γy1, γz1.
Прочие параметры положения элементов измерительной системы при первом подвешивании - проекции сил натяжения строп T11x, Т21х, Т31х, Т41х, Т11у, Т21у, Т31у, Т41у, T11z, T21z, T31z, T41z и углы ориентации траверсы γT1x, γT1y, γT1z - находятся из условий равновесия статики траверсы
совместно с условиями замкнутости геометрически изменяемых пространственных многоугольников BOGD, ВОКЕ и BOMF
Представленные пять уравнений в проекции на оси координат xyz дают систему из 15 уравнений (2):
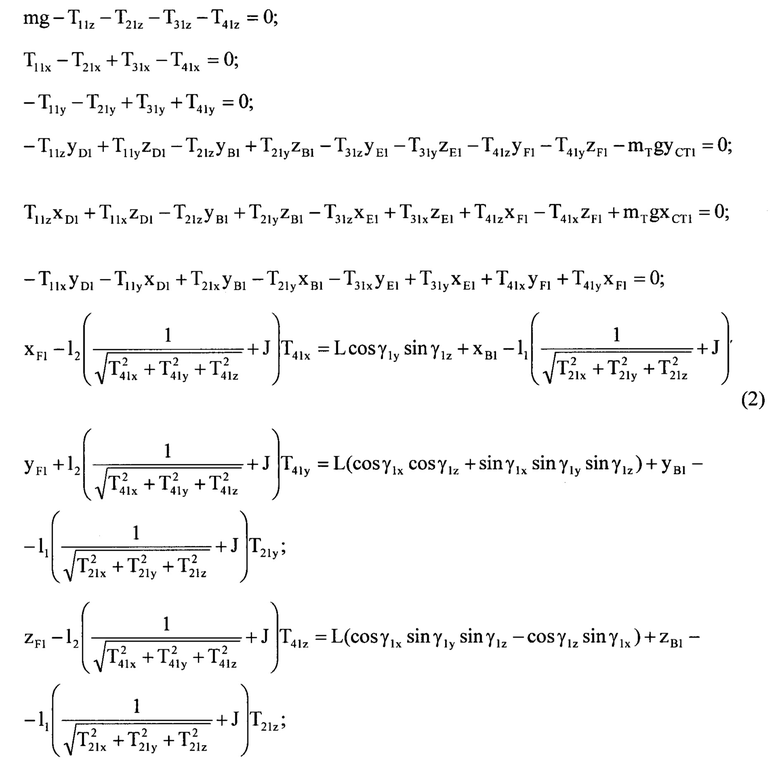
где координаты узловых точек траверсы при первом подвешивании xD1, yD1, zD1, xB1, уB1, zB1, xE1, yE1, zE1, xF1, yF1, zF1 зависят от геометрических параметров траверсы и углов ее ориентации в соответствии с уравнением преобразования координат при пространственных поворотах
J - продольная жесткость строп.
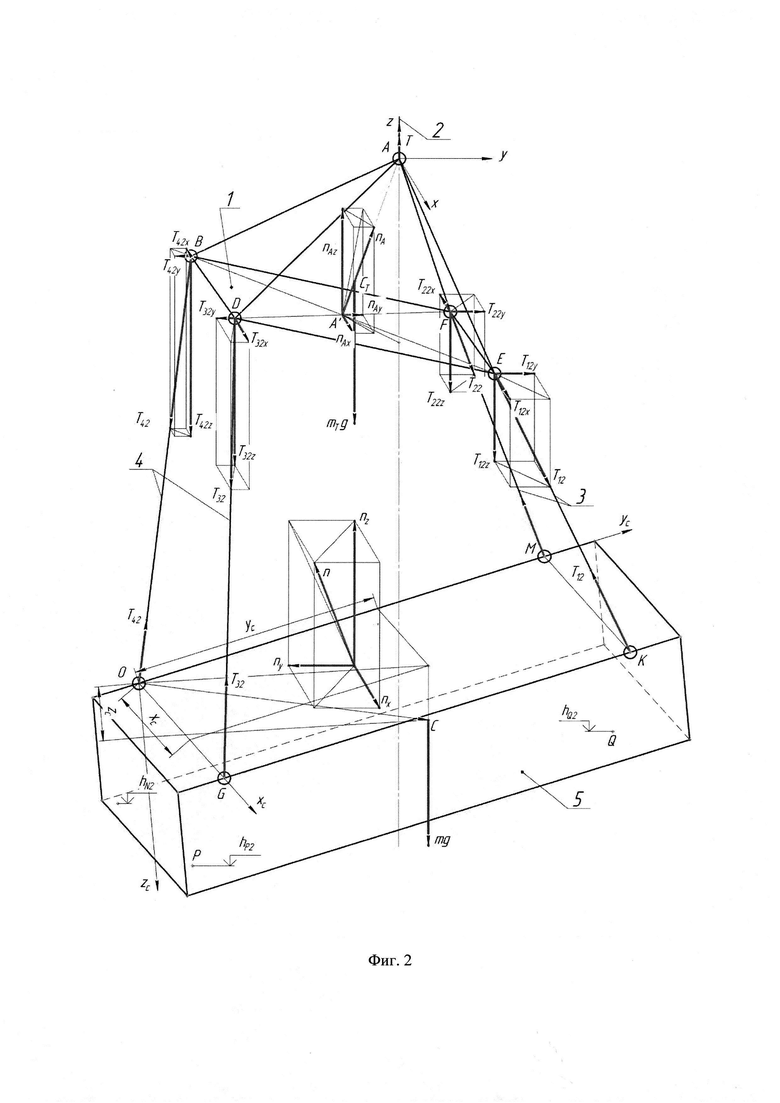
На фиг. 2 изображена измерительная система в равновесном положении при втором подвешивании после перемены пар строп разной длины местами.
По аналогии с первым подвешиванием по формуле (1) определяются углы ориентации изделия в пространстве γТ2х, γТ2у, γT2z в зависимости от измеренной высоты точек N, Р, Q над уровнем пола hN2, hP2, hQ2. Прочие параметры положения элементов измерительной системы - силы натяжения строп Т12х, Т22х, Т32х, Т42х, Т12у, Т22у, Т32у, Т42у, T12z, T22z, T32z, T42z и углы ориентации траверсы γТ2х, γТ2у, γT2z - определяются из системы уравнений (4).

где координаты узловых точек траверсы при втором подвешивании xD2, уD2, zD2, хВ2, уВ2, zB2, хЕ2, уЕ2, zE2, xF2, уF2, zF2 зависят от углов ее ориентации γТ2х, γТ2у, γT2z в соответствии с (3).
Координаты центра тяжести изделия в системе координат изделия ХС, YC, ZC определяются из моментных уравнений равновесия измерительной системы при двух подвешиваниях относительно осей х и у.

где  - сумма моментов сил тяжести элементов измерительной системы относительно i оси при j подвешивании. Плечи моментов выражаются через координаты узловых точек элементов системы.
- сумма моментов сил тяжести элементов измерительной системы относительно i оси при j подвешивании. Плечи моментов выражаются через координаты узловых точек элементов системы.
Поскольку число уравнений превышает число неизвестных координат пространственного положения центра тяжести ХС, YC и ZC для совместного решения берутся два уравнения относительно оси х и любое из уравнений относительно оси у, например
Для повышения точности получаемого результата следует:
- минимизировать силы трения в соединениях элементов измерительной системы;
- максимально точно знать расположение центра тяжести траверсы, поскольку она играет роль противовеса объекту испытаний;
- произвольные точки N, Р, Q на нижней поверхности изделия брать максимально удаленными друг от друга.
Таким образом, экспериментальная часть предлагаемого способа состоит из следующих операций:
До начала подъема изделия измеряют размеры грузовой траверсы аТ, bT, НТ, ее масса mT, масса изделия т, длины строп l1 и l2, расстояния между точками крепления строп к изделию В и L, намечаются три произвольные точки на нижней поверхности изделия N, Р, Q и определяются их координаты в системе координат изделия Охс ус zc;
Собирают измерительную систему. К тяговому тросу подъемного устройства крепится траверса. Траверса и изделие соединяются стропами согласно фиг. 1.
Осуществляется подъем измерительной системы.
После самоустановки системы в равновесное состояние измеряется высота точек N, Р, Q над уровнем пола hN1, hP1, hQ1.
Система опускается и меняются местами пары строп разной длины согласно фиг. 2.
Осуществляется повторный подъем измерительной системы.
После самоустановки в равновесное состояние измеряется высота точек N, Р, Q над уровнем пола hN2, hP2, hQ2.
Система опускается.
Аналитическая часть способа включает в себя последовательность следующих операций:
Расчет углов ориентации изделия при первом подвешивании γ1x, γ1y, γ1z по формулам (1) в зависимости от значений hN1, hP1, hQ1.
Расчет параметров положения элементов измерительной системы при первом подвешивании T11x, Т21х, Т31х, Т41х, T11y, Т21у, Т31у, Т41у, T11z, T21z, T31z, T41z, γT1x, γT1у, γT1z по формулам (2).
Расчет углов ориентации изделия при втором подвешивании γ2х, γ2у, γ2z по формулам (1) в зависимости от значений hN2, hP2, hQ2.
Расчет параметров положения элементов измерительной системы при втором подвешивании Т12х, Т22х, Т32х, Т42х, Т12у, Т22у, Т32у, Т42у, T12z, T22z, T32z, T42z, γT2x, γT2у, γT2z по формулам (4).
Расчет координат центра тяжести ХС, YC, ZC по формулам (5).
Таким образом, определение положения центра тяжести массивных изделий двукратным подвешиванием изделия на дополнительном подвижном подвесе с разной пространственной ориентацией и математического вычисления координат центра тяжести изделия в зависимости от массогеометрических параметров измерительной системы и углов ориентации изделия в равновесных состояниях, обеспеченных переменой местами строп разной длины между подвешиваниями, позволило исключить дополнительные силоизмерительные средства для определения сил натяжения строп, тем самым упростить способ измерения и расширить область применения способа с возможностью использования универсальной погрузочной оснастки и подъемных устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения центра тяжести изделия подвешиванием по положению траверсы | 2021 |
|
RU2777341C1 |
| Способ определения положения центра тяжести массивных и крупногабаритных объектов сложной формы | 2022 |
|
RU2809111C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| Стенд для измерения массы, координат центра масс и моментов инерции изделий | 2024 |
|
RU2830397C1 |
| МНОГОЛУЧЕВАЯ НЕАПЛАНАТИЧЕСКАЯ ГИБРИДНАЯ ЗЕРКАЛЬНАЯ АНТЕННА | 2001 |
|
RU2181519C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2579827C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЯ | 2012 |
|
RU2506551C2 |
| L-координатный пространственный механизм | 1988 |
|
SU1583726A1 |
| СПОСОБ НЕИНВАЗИВНОГО ОПРЕДЕЛЕНИЯ ЭЛЕКТРОФИЗИОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК СЕРДЦА | 2017 |
|
RU2651068C1 |
| ТРАВЕРСА ГОРИЗОНТАЛЬНОЙ СТЫКОВКИ, БЛОК ЗАДАНИЯ НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, БЛОК КОМПЕНСАЦИИ ВЕКТОРА НАГРУЗКИ МЕХАНИЗМА БАЛАНСИРОВКИ ТРАВЕРСЫ, СПОСОБ НАСТРОЙКИ БАЛАНСИРОВКИ ТРАВЕРСЫ | 2008 |
|
RU2374164C1 |
Изобретение относится к измерительной технике в машиностроении и может быть использовано для определения положения центра тяжести массивного изделия подвешиванием при помощи подъемного устройства. Способ заключается в двукратном подвешивании изделия с разной пространственной ориентацией и применением дополнительного подвижного подвеса в виде траверсы, при этом в поднятом состоянии измерительная система принимает равновесное состояние совместным наклоном подвеса и изделия, затем математически вычисляют координаты ХС, YC, ZC центра тяжести изделия в зависимости от параметров положения и массо-геометрических параметров элементов измерительной системы в равновесных состояниях, обеспечиваемых попарным изменением длины строп между подвешиваниями. Технический результат заключается в упрощении определения положения центра тяжести массивных изделий и расширении области применения способа с возможностью использования универсальной погрузочной оснастки и подъемных устройств. 1 з.п. ф-лы, 2 ил. 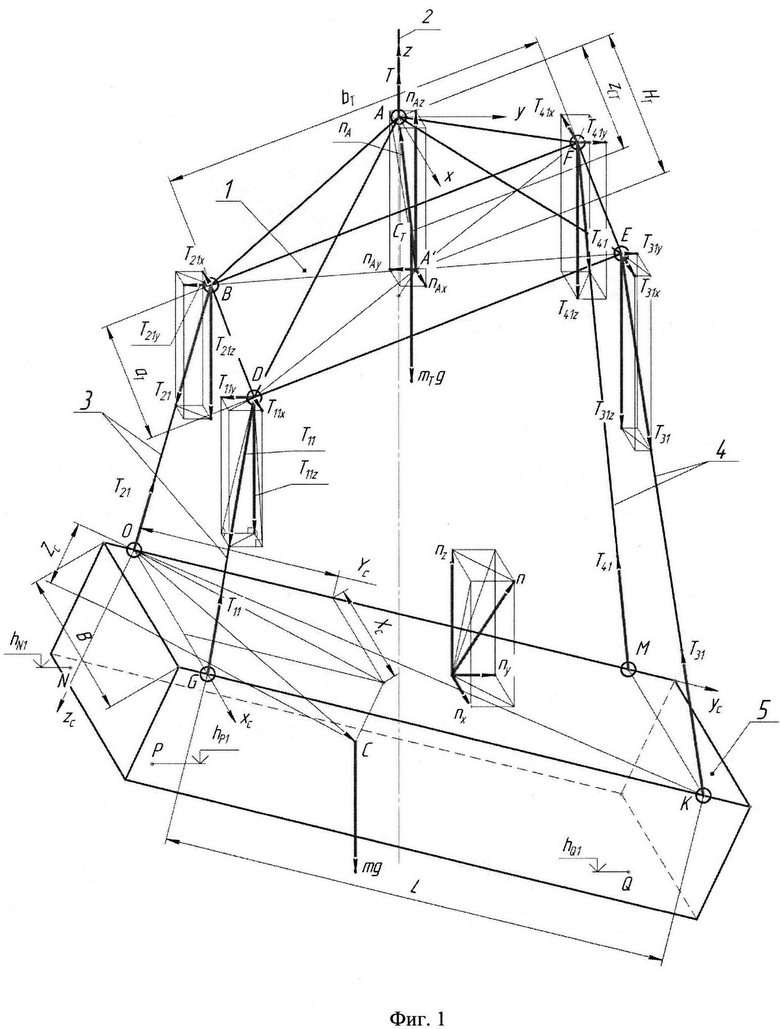
1. Способ определения положения центра тяжести массивных изделий, заключающийся в, по меньшей мере, двукратном подвешивании изделия с разной пространственной ориентацией, определении ориентации изделия в каждом пространственном положении измерительной системы, отличающийся тем, что изделие подвешивают на дополнительном подвижном подвесе в виде траверсы, при этом в поднятом состоянии измерительная система принимает равновесное состояние совместным наклоном подвеса и изделия, затем математически вычисляют координаты ХС, YC, ZC центра тяжести изделия в зависимости от параметров положения и массогеометрических параметров элементов измерительной системы в равновесных состояниях, обеспечиваемых попарным изменением длины строп между подвешиваниями.
2. Способ по п. 1, отличающийся тем, что массогеометрические параметры элементов измерительной системы включают: размеры подвеса аТ, bT, НТ; длины строп l1 и l2; массу подвеса mT, координату его центра тяжести zCT; массу изделия m; расстояния между точками крепления строп к изделию L и В; координаты трех произвольно выбранных точек N, Р, Q нижней поверхности изделия в системе координат изделия xN, уN, zN, хР, уР, zP, xQ, уQ, zQ; при этом параметры положения элементов измерительной системы включают: высоту hNi, hPi, hQi над уровнем пола, по меньшей мере, трех произвольных точек поверхности изделия после подъема и самоустановки системы в i равновесном состоянии; вычисляемые углы ориентации изделия при i подвешивании γix, γiy, γiz в зависимости от значений высоты hNi, hPi, hQi; вычисляемые силы натяжения в стропах при i подвешивании в проекции на координатные оси T1ix, T1iy, T1iz, T2ix, T2iy, T2iz, T3ix, T3iy, T3iz, T4ix, T4iy, T4iz; вычисляемые углы ориентации подвеса γTix, γTiy, γTiz.
| WO 2008122448 A1, 15.09.1991 | |||
| Устройство для определения координат центра масс изделий | 1989 |
|
SU1677543A1 |
| Способ определения центра тяжести груза и устройство для его осуществления | 1986 |
|
SU1404431A1 |
| Способ определения координат центра масс изделия | 1990 |
|
SU1772636A1 |

