Изобретение относится к бортовым комплексам (аппаратуре, в т.ч. наведения и самонаведения) оптического диапазона длин волн скоростных летательных аппаратов (ЛА).
Известны способы ориентирования (в т.ч. стабилизации) ЛА или его части, основанные на корреляции условно «неподвижных» внешних по отношению к ЛА оптических ориентиров (реперов) - как естественных (звезды, Солнце, линия горизонта), так и искусственного происхождения (световые маяки, характерные техногенные сооружения) - с положением (в т.ч. сканирующей приемной диаграммы) бортовых датчиков в связанной системе координат ЛА - см., например, "Инженерный справочник по космической технике" под ред. А.В. Солодова, М., Воениздат, 1977 г., стр. 173-182, 186-194.
Ближайшим аналогом предлагаемого технического решения является способ ориентирования (по углам крена, курса, тангажа) космического аппарата, оснащенного оптическим матричным приемником (звездным датчиком, солнечным датчиком, датчиком инфракрасной вертикали), см., например, М.Е. Прохоров, А.И. Захаров, А.В. Миронов и др. «Современные датчики звездной ориентации», ГАИШ, 2009 год http//www.lyra.sai.msu.ru, доступно на 12.05.2021, посредством корреляции связанных осей КА и условно "неподвижных" (относительно именно скоростного КА) ориентиров. В соответствии со способом ориентирование КА обеспечивают нахождением на изображении с оптического датчика (приемника) матричного типа ориентиров априори известной яркости или контраста, определение положения ориентиров относительно заданного, выдачи сигнала управления для разворота КА до расположения изображения ориентира в заданном месте матричного приемника. Особенностью и недостатком способа является его работа с ориентирами, яркостно-контрастные характеристики которых относительно фона заранее известны. Кроме того, для реализации вышеприведенных способов ориентирования ЛА необходимо наличие специализированных для решения именно этой задачи аппаратурных блоков.
Технической задачей изобретения является создание способа ориентирования по крену скоростного ЛА с оптической головкой самонаведения (ГСН) при движении его по баллистической траектории, оснащенного широкоугольным матричным приемником ГСН, посредством корреляции связанных осей ЛА и условно «неподвижных» ориентиров неба и земли, работоспособного при любых относительных яркостях неба и земли.
Указанная техническая задача решается тем, что в предлагаемом способе ориентирования летательного аппарата с оптической ГСН при движении по баллистической траектории, включающем визирование широкоугольным матричным приемником ГСН неба и земли, определение крена ЛА относительно продольной оси и выдачу сигнала управления ЛА по крену, до старта ЛА рассчитывают время попадания в поле зрения ГСН области земли, после старта ЛА включают ГСН и на восходящем участке баллистической траектории определяют яркость или цвет неба, в расчетное время попадания в поле зрения ГСН области земли находят отличающееся по яркости или цвету и расположенное на краях матричного приемника ГСН пятно, принимаемое за изображение области земли, крен определяют по угловому отклонению линии, соединяющей геометрические центры изображений областей неба и земли относительно строки или столбца матричного приемника, при этом строки матричного приемника размещают поперек, а столбцы - вдоль вертикальной оси связанной системы координат ЛА, поворот ЛА осуществляют по крену до расположения области неба на строках матричного приемника выше области земли по направлению этой оси.
При этом модуль угла крена γ определяют по формулам:
где n3 - количество элементов матричного приемника (пикселей) области земли; nн - количество элементов области неба; (iзk, jзk) - соответственно номера строки и столбца k-го пиксела области земли; (iнk, jнk) -соответственно номера строки и столбца k-то пиксела области неба; (iз, jз) - соответственно номера строки и столбца геометрического центра области земли; (iн, jн) - соответственно номера строки и столбца геометрического центра области неба. Нумерацию строк проводят сверху вниз, против принятого направления вертикальной оси связанной системы координат ЛА, нумерацию столбцов проводят слева направо.
Знак крена определяют по знаку выражения jн - jз.
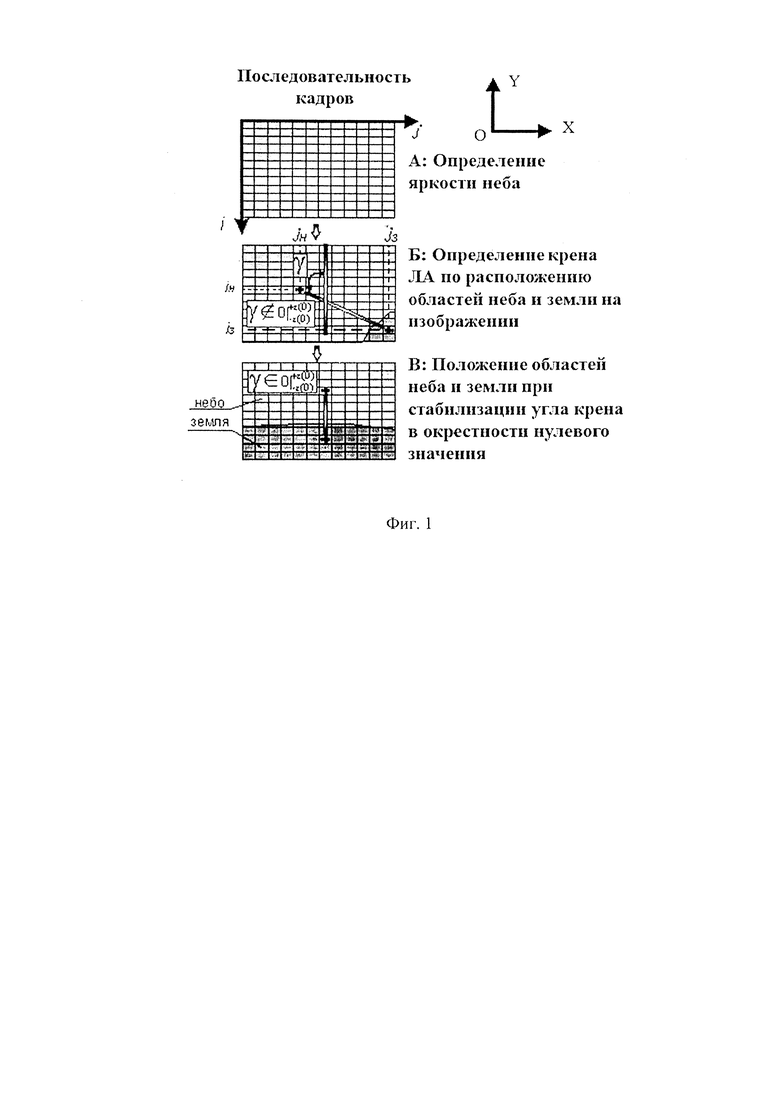
Принципиальная схема работы по данному способу матричного приемника ГСН, покадрово визирующего оптические ориентиры, представлена на фиг. 1.
Приняты обозначения: А: изображение на матричном приемнике оптического ориентира - неба; Б: изображение на матричном приемнике оптических ориентиров неба и земли, геометрические центры которых соединены линией. Также показано угловое положение линии относительно столбца матричного приемника.
В: изображение на матричном приемнике оптических ориентиров в окрестности нулевого значения угла крена ЛА (γ ∈ 0).
Для предлагаемого технического решения характерны следующие особенности. Способ работоспособен в случае различия яркости или цветности неба и земли, фиксация которых возможна головкой самонаведения. При запуске ЛА по баллистической траектории заранее прогнозируют форму траектории, время полета, реперные точки: время нахождения в поле зрения ГСН только области неба, время попадания поле зрения ГСН также области земли. Временные интервалы и реперные точки сохраняют в памяти бортового вычислительного комплекса ЛА. ГСН включают после старта ЛА - на восходящем участке баллистической траектории, когда в поле зрения матричного приемника ГСН попадает только область неба.
Например, при движении ЛА на восходящем участке траектории в момент времени tj, в поле зрения ГСН попадает только область неба, фиг. 1, поз. А. Яркость неба определяют на основе гистограммного анализа - информацию о яркости (цвете) неба, в виде набора максимальных частот появления пикселов разной яркости (цвета) сохраняют в памяти бортового вычислительного комплекса ЛА.
В тактовый момент ti (ti>tj) прогнозируемого появления в поле зрения ГСН области земли начинают процедуру поиска земли на изображении матричного приемника, фиг. 1, поз. Б. Процедура построена с использованием методов гистограммного и морфологического анализа изображения. При обработке кадра гистограмму яркости (цвета) кадра сравнивают с ранее сохраненной гистограммой яркости (цвета) неба. При нахождении в результате сравнения областей «новой» яркости (цвета), которые могут соответствовать области земли, формируют бинарное (черно-белое) изображение, где пикселам, например, с яркостью (цвета) земли присваивают значение яркости «1», остальным - «0». Принимают гипотезу о нахождении земли. При этом землей считается область, обладающая признаками непосредственного соседства (т.н. «связности») пикселей «новой» яркости (цвета), нахождения на краях матричного приемника. В случае изначальной закрутки ЛА по крену для нахождения земли могут применяться дополнительные признаки, например, перемещение области «новой» яркости (цвета) по краям матричного приемника.
Подтверждение гипотезы нахождения земли проводят путем обработки еще нескольких кадров.
Угол крена определяют по формулам:
где nз - количество элементов (пикселей) области земли; nн - количество элементов области неба; (iзk , jзk) - соответственно, номера строки и столбца k-го пиксела области земли; (iнk, jнk) - соответственно, номера строки и столбца k-го пиксела области неба; (iз, jз) - соответственно, номера строки и столбца геометрического центра области земли; (iн, jн) - соответственно, номера строки и столбца геометрического центра области неба. Под геометрическим центром понимают среднее арифметическое положений всех точек области, характеризуемое номером строки и столбца. При этом нумерацию строк проводят сверху вниз, против принятого направления вертикальной оси связанной системы координат ЛА, OY, см. фиг. 1, нумерацию столбцов проводят слева направо. Знак крена определяют по знаку выражения jн - jз.
Далее выдают сигнал управления ЛА по крену для его поворота до расположения области неба на строках матричного приемника выше области земли по направлению вертикальной оси связанной системы координат. На фиг. 1, поз. В показано изображение развернутого после устранения крена ЛА.
Реализация предложенного способа ориентирования ЛА с оптической ГСН позволит дополнительно резервировать специализированные аппаратурные блоки ориентирования ЛА либо упразднить их, применив для решения данной задачи штатные ГСН с широкоугольным матричным приемником оптического излучения. При этом обеспечивается задействование ГСН не только на завершающем участке траектории вблизи цели, но и по всей трассе баллистического полета ЛА. Данное техническое решение позволяет также существенно улучшить показатель «эффективность-стоимость», особенно для недорогих ЛА, выпускаемых большими сериями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТИРОВАНИЯ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ОПТИЧЕСКОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2004 |
|
RU2280590C2 |
| Оптико-электронная головка самонаведения | 2024 |
|
RU2833954C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ РАКЕТНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2718560C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БАЛЛИСТИЧЕСКОГО САМОНАВОДЯЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА "ПОВЕРХНОСТЬ - ПОВЕРХНОСТЬ" | 2002 |
|
RU2216708C1 |
| СИСТЕМА НАВЕДЕНИЯ ПРОТИВОСАМОЛЕТНЫХ РАКЕТ | 2009 |
|
RU2400690C1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕПЛОВЫХ ОБЪЕКТОВ НА ФОНЕ НЕБЕСНОЙ ПОЛУСФЕРЫ | 2009 |
|
RU2407028C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТОЧЕЧНЫХ ТЕПЛОВЫХ ОБЪЕКТОВ НА СЛОЖНОМ АТМОСФЕРНОМ ФОНЕ | 2011 |
|
RU2461017C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТОЧЕЧНЫХ ТЕПЛОВЫХ ОБЪЕКТОВ НА МАСКИРУЮЩЕМ АТМОСФЕРНОМ ФОНЕ | 2011 |
|
RU2480780C1 |
| Способ оптического обнаружения слабоконтрастных динамических объектов на сложном атмосферном фоне | 2015 |
|
RU2634374C2 |
Изобретение относится к способу ориентирования летательного аппарата (ЛА) с оптической головкой самонаведения (ГСН) при движении по баллистической траектории. Для ориентирования ЛА до его старта рассчитывают время попадания в поле зрения ГСН области Земли, после старта ЛА включают ГСН, осуществляют визирование широкоугольным матричным приемником ГСН неба и Земли, на восходящем участке баллистической траектории определяют яркость или цвет неба и Земли, определяют крен ЛА по разнице яркости или цвета неба и Земли, используя матричный приемник определенным образом, осуществляют поворот ЛА по крену до расположения области неба на строках матричного приемника выше области Земли. Обеспечивается повышение точности ориентирования ЛА при любых относительных значениях яркости неба и Земли. 1 з.п. ф-лы, 1 ил.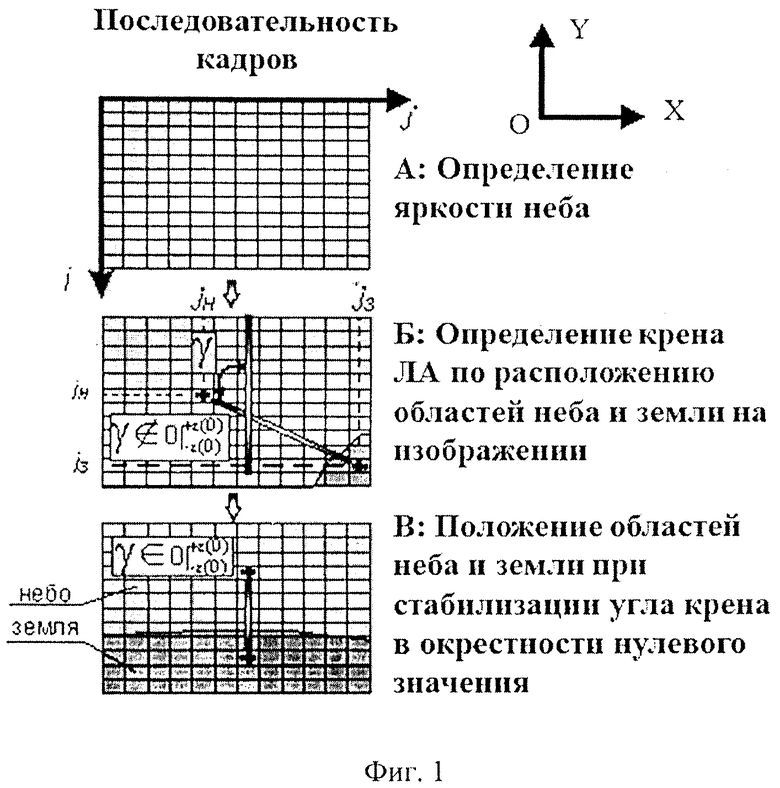
1. Способ ориентирования летательного аппарата (ЛА) с оптической головкой самонаведения (ГСН) при движении по баллистической траектории, включающий визирование широкоугольным матричным приемником ГСН неба и Земли, определение крена ЛА по разнице яркостей или цвета неба и Земли, выдачу сигнала поворота ЛА по крену, отличающийся тем, что до старта ЛА рассчитывают время попадания в поле зрения ГСН области Земли, после старта ЛА включают ГСН и на восходящем участке баллистической траектории определяют яркость или цвет неба, в расчетное время попадания в поле зрения ГСН области Земли находят отличающееся по яркости или цвету и расположенное на краях матричного приемника ГСН пятно, принимаемое за изображение области Земли, крен определяют по угловому отклонению линии, соединяющей геометрические центры изображений областей неба и земли относительно строки или столбца матричного приемника, при этом строки матричного приемника размещают поперек, а столбцы - вдоль вертикальной оси связанной системы координат ЛА, поворот ЛА осуществляют по крену до расположения области неба на строках матричного приемника выше области Земли по направлению этой оси.
2. Способ ориентирования летательного аппарата по п. 1, отличающийся тем, что модуль угла крена γ определяют по формулам
где n3 - количество элементов матричного приемника области Земли, nн - количество элементов области неба, iзk, jзk - соответственно номера строки и столбца k-го пиксела области Земли, ink, jnk - соответственно номера строки и столбца k-го пиксела области неба, iз, jз - соответственно номера строки и столбца геометрического центра области Земли, iн, jн - соответственно номера строки и столбца геометрического центра области неба, нумерацию строк проводят сверху вниз, против принятого направления вертикальной оси связанной системы координат ЛА, нумерацию столбцов проводят слева направо, причем знак крена определяют по знаку выражения jн - jз.
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА ГАСАД-2А | 2005 |
|
RU2304549C2 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| Оптическое устройство, использующее баллистическое масштабирование, и способ визирования цели (варианты) | 2015 |
|
RU2674720C2 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| KR 1020080033287 A, 16.04.2008 | |||
| AU 2004202924 A1, 12.01.2006. | |||

