Изобретение относится к робототехнике и может найти широкое применение в аэрокосмической отрасли при осуществлении диагностики металлоконструкций и оборудования. Важность использования обусловлена технической надежностью и безопасностью в данной отрасли, где критическую роль играет состояние конструкций.
Использование робота позволит неинвазивно выявлять потенциальные дефекты или повреждения на ранних стадиях, что существенно повышает стандарты безопасности в авиации и космонавтике. Кроме того, данное изобретение имеет потенциал применения в других отраслях, где безопасность и техническая надежность играют важную роль в поддержании стабильности и предотвращении возможных проблем в инфраструктуре и промышленности.
Известен самоходный робот для выполнения технологических операций на ферромагнитных поверхностях (RU 206977, опубл. 05.10.2021). Устройство включает в себя две секции, объединенные шарнирным соединением с рычагами переменной длины, предоставляющими несколько степеней свободы. Каждая секция представляет собой раму с распределенной на ней нагрузкой. На каждой раме закреплены два модуля для перемещения. Каждый модуль содержит корпус с устройством контроля сцепления, магнитным экраном, сжимающим электромагнитом, двигателем и его приводом. Каждый модуль снабжен отдельной системой управления для обеспечения перемещения.
Недостатком известного робота является ограниченные технологические возможности, обусловленные отсутствием средств неразрушающего контроля поверхности, что не позволяет неинвазивно выявлять потенциальные дефекты или повреждения металлоконструкций.
Наиболее близким к заявляемому является самоходный робот PL 300, предназначенный для проведения телеинспекции трубопроводов (RU 142123, опубл. 20.06.2014), который состоит из колесной тележки, оборудованной четырьмя вращающимися колесами, управляемыми электроприводами. На корпусе тележки размещена видеокамера со светодиодным освещением, которая передает изображение на удаленный пульт управления. Робот соединен с пультом управления через специальный кабель, который хранится на катушке вне трубопровода. Управление роботом выполняется с помощью пульта управления, который отправляет сигналы контроллеру робота, где они обрабатываются и передаются к периферийным устройствам. Движение тележки осуществляется за счет электрического двигателя, который передает вращающий момент колесам. Видеоизображение передается на монитор системы через кабель с помощью видеокамеры. Самоходный робот PL 300 широко используется для проведения инспекции подземных трубопроводов с диаметром от 300 до 2000 мм, а также в труднодоступных местах, таких как туннели и контейнеры.
Основным недостатком известного устройства является невозможность диагностики материала металлоконструкций и выявления потенциальных дефектов.
Кроме того, наличие кабеля и невозможность перемещения по вертикальным поверхностям влечет за собой уменьшение мобильности движения и повышения энергозатрат.
Техническая задача заключается в создании самоходного робота, обладающего широким спектром технологических возможностей при диагностике металлоконструкций, способного обнаруживать трещины, коррозию и прочие дефекты, а также оперативного реагирования на выявленные дефекты и угрозы вследствие повреждения металлоконструкции.
Технический результат - расширение функциональных возможностей устройства при осуществлении диагностики металлоконструкций с выявлением потенциальных дефектов за счет контролирования амплитудно-частотных характеристик материала металлоконструкций.
Технический результат достигается тем, что у самоходного робота для диагностики металлоконструкций, содержащего несущее основание, механизм перемещения, видеокамеру со светодиодным освещением, контроллер и источник питания, согласно изобретению, несущее основание оснащено виброакустическим модулем, имитатором вибрации и антенной, при этом механизм перемещения выполнен в виде гусеничного полотна с магнитными элементами и приводными роликами, имитатор вибрации выполнен с возможностью осуществления удара о стенку металлоконструкции, а виброакустический модуль выполнен с возможностью фиксации изменений амплитудно-частотных характеристик, вызванных ударом имитатора вибрации и сравнения их с эталонными, при этом контроллер выполнен с возможностью управления перемещением робота, получения, обработки полученных сигналов и передачи информации оператору с помощью антенны.
Виброакустический модуль позволяет осуществлять сканирование и анализ состояния металлических конструкций по сигналам имитатора вибраций, который способен воспроизводить различные типы волновых сигналов при осуществлении ударов о стенку металлоконструкции. Наличие имитатора вибрации и виброакустического модуля, передающего сигналы на контроллер, который связан с оператором, позволяет расширить функциональные возможности робота, придавая ему функциональную возможность быстро реагировать на обнаруженные повреждения и угрозы, вызванные дефектами металлической конструкции.
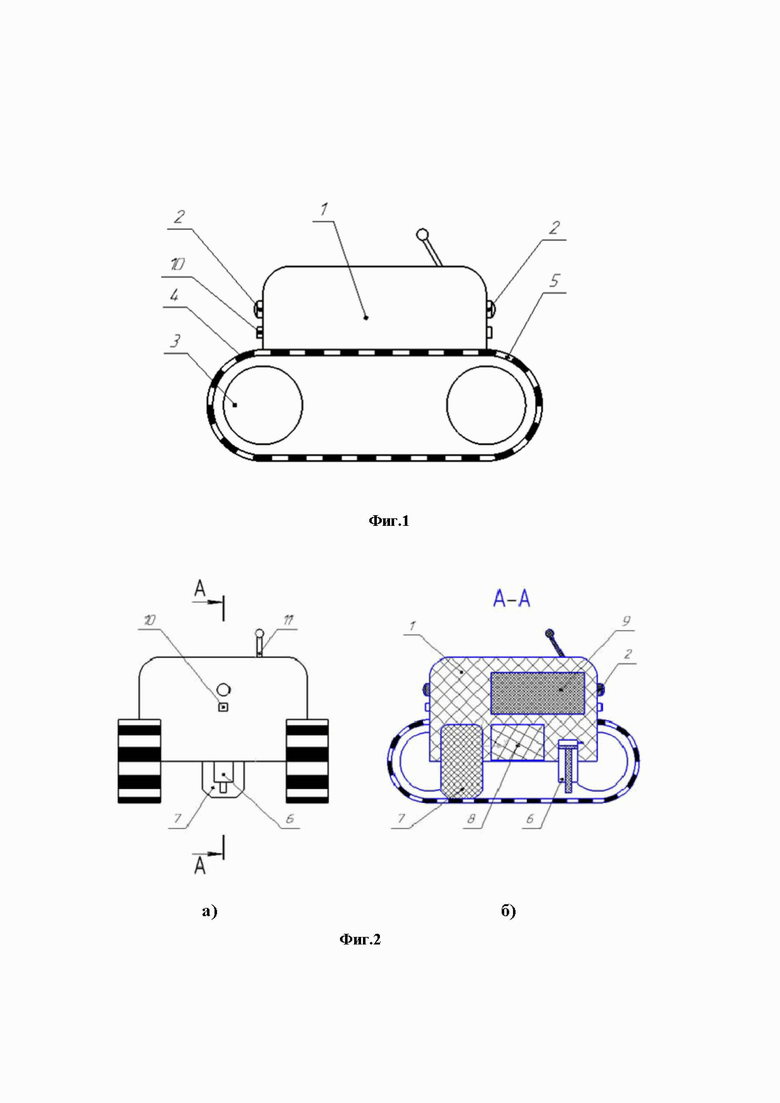
На фиг.1 представлен общий вид самоходного робота, на фиг.2 – вид сбоку (а) и вид А на фиг.2 (б).
Робот содержит несущее основание 1, на котором размещены видеокамеры 2, расположенные на задней и передней поверхности корпуса основания 1. Механизм перемещения выполнен в виде гусеничного полотна 4 с магнитными элементами 5 и приводными роликами 3. На нижней плоскости несущего основания 1 установлены имитатор вибрации 6 и виброакустический модуль 7 амплитудно-частотных характеристик. В основании 1 расположен управляющий контроллер 8, источник питания 9, светодиодные прожекторы 10 и антенна 11.
Наличие в конструкции робота гусеничного полотна 4 с установленными на нём магнитами элементами 5 позволяют ему беспрепятственно перемещаться по металлоконструкции с различными, в том числе вертикальными, поверхностями.
Виброакустический модуль амплитудно-частотных характеристик и имитатор вибраций позволяют устройства производить неразрушающий контроль.
Видеокамера осуществляет измерение поверхностных дефектов объекта измерения.
Согласно п.2 формулы оптимальная работа робота обеспечивается в том случае, если виброакустический модуль работает на частотах 5-10000 Гц.
Самоходный робот осуществляет свою работу следующим образом.
Робот устанавливают на поверхность металлоконструкции. С поста управления оператор отправляет сигнал, который принимает антенна 11 и передает на контроллер 8, соединенный с источником питания 9. Видеокамера 2 при помощи светодиодных прожекторов 10 идентифицируют препятствия, дефекты металлоконструкции и сложные участки. Информация о состоянии металлоконструкции с видеокамеры 2 поступает в управляющий контроллер 8, который задает маршрут передвижения робота по поверхности металлоконструкции и управляет приводными роликами 3, приводящими в движение гусеничные полотна 4. Магнитные элементы 5 перемещают несущее основание 1 по горизонтальным и вертикальным поверхностям. Маневрирование робота происходит за счёт закручивание одного гусеничного полотна 4 относительно другого путем вращения лишь одного приводного ролика 3. Виброакустический модуль 7 записывает амплитудно-частотные изменения характеристик, вызванных ударом имитатора вибрации 6 о стенку металлоконструкции в постоянном режиме и передает на управляющий контроллер 8, что позволяет сравнивать характеристики акустической волны дефектного участка металлоконструкции с эталонным образцом без дефектов согласно программе, заданной контроллером 8.
Предлагаемый робот в отличие от робота по прототипу является более надежным, динамичным, технологичным в работе.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2780829C1 |
| Устройство для диагностики отложений в молокопроводах доильных установок | 2024 |
|
RU2837321C1 |
| ВНУТРИТРУБНЫЙ РОБОТ ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 2021 |
|
RU2773721C1 |
| АВТОНОМНЫЙ РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2022 |
|
RU2796166C1 |
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| Способ определения уровня транспортной безопасности объектов гражданской авиации РФ | 2017 |
|
RU2692269C2 |
| РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2021 |
|
RU2784960C2 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
Изобретение относится к робототехнике, применяемой при осуществлении диагностики металлоконструкций и оборудования. Самоходный робот для диагностики металлоконструкций содержит несущее основание, механизм перемещения, видеокамеру со светодиодным освещением, контроллер и источник питания. Несущее основание оснащено виброакустическим модулем, имитатором вибрации и антенной. Механизм перемещения выполнен в виде гусеничного полотна с магнитными элементами и приводными роликами. Имитатор вибрации выполнен с возможностью осуществления удара о стенку металлоконструкции, а виброакустический модуль выполнен с возможностью фиксации изменений амплитудно-частотных характеристик, вызванных ударом имитатора вибрации и сравнения их с эталонными. Контроллер выполнен с возможностью управления перемещением робота, получения, обработки полученных сигналов и передачи информации оператору с помощью антенны. Достигается расширение функциональных возможностей устройства при осуществлении диагностики металлоконструкций с выявлением потенциальных дефектов за счет контролирования амплитудно-частотных характеристик материала металлоконструкций. 1 з.п. ф-лы, 2 ил.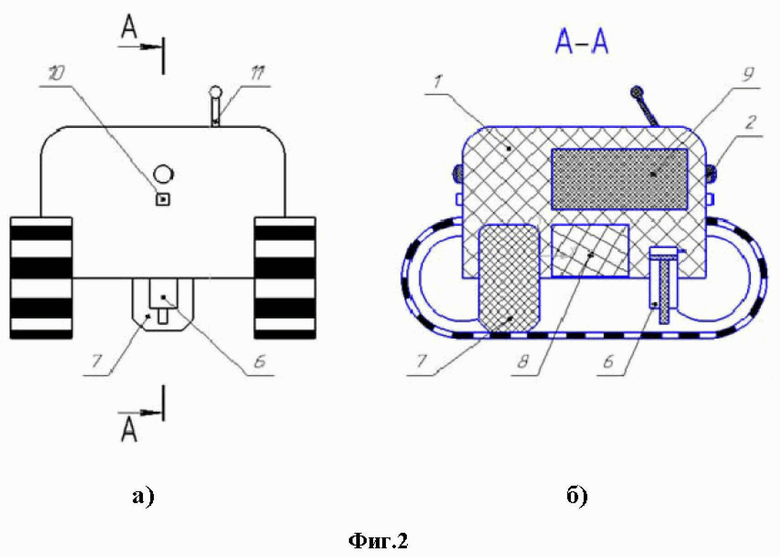
1. Самоходный робот для диагностики металлоконструкций, содержащий несущее основание, механизм перемещения, видеокамеру со светодиодным освещением, контроллер и источник питания, отличающийся тем, что несущее основание оснащено виброакустическим модулем, имитатором вибрации и антенной, при этом механизм перемещения выполнен в виде гусеничного полотна с магнитными элементами и приводными роликами, имитатор вибрации выполнен с возможностью осуществления удара о стенку металлоконструкции, а виброакустический модуль выполнен с возможностью фиксации изменений амплитудно-частотных характеристик, вызванных ударом имитатора вибрации и сравнения их с эталонными, при этом контроллер выполнен с возможностью управления перемещением робота, получения, обработки полученных сигналов и передачи информации оператору с помощью антенны.
2. Самоходный робот по п.1, отличающийся тем, что виброакустический модуль работает на частотах 5-10000 Гц.
| СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОЙ ДИАГНОСТИКИ ИЗДЕЛИЙ ИЗ МЕТАЛЛОВ И СПЛАВОВ | 2010 |
|
RU2445614C1 |
| РОБОТ ДЛЯ ДИАГНОСТИКИ И РЕМОНТА ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2019 |
|
RU2721473C1 |
| Способ вибрационной диагностики целостности металлоконструкций | 1989 |
|
SU1772646A1 |
| CN 107399378 A, 28.11.2017 | |||
| JP 2001083125 A, 30.03.2001 | |||
| Система программного управления металлорежущими станками | 1961 |
|
SU142123A1 |

