Настоящее изобретение относится к способу радиального выравнивания колесных пар рельсовых транспортных средств относительно системы координат станка для диагностики колесных пар и/или обработки колесных пар.
В предшествующем уровне техники существует потребность в подобных способах для анализа или обработки колесных пар рельсовых транспортных средств.
Колеса рельсовых транспортных средств подлежат постоянному контролю, обработке и повторной обработке. Это включает в себя такие операции, как вращение или прокатка, а также анализ, например, в целях обеспечения безопасности.
Колеса рельсовых транспортных средств включают поверхности катания и реборды бандажа. Они подвержены сильным нагрузкам. Вращательные движения по рельсам приводят к обкатке материала и деформациям. Колеса должны проходить регулярные проверки и, в случае необходимости, дополнительно обрабатываться.
В связи с этим известно, что колесные пары располагают на станках, при этом каждое колесо закрепляется, центрируется и, в случае необходимости, приводится в движение.
Из уровня техники известны станки, где колеса расположены над станком. Они представляют собой так называемые станки, расположенные под кузовом. Колеса могут находиться во встроенном состоянии, т.е. прикреплены к вагону или составу, в снятом состоянии, т.е. соединены, например, осью, или, при применении тележек определенного типа, подвешены по отдельности. В последнем случае колеса выровнены по виртуальному валу.
Поскольку как анализ, так и обработка направлены на выявление отклонений контура колеса от заданных значений и, при необходимости, на их устранение путем обработки, необходимо, чтобы колеса имели точное исходное положение по отношению к станку. Это означает, что системы координат станка, с одной стороны, и колесной пары, с другой, должны быть согласованы друг с другом.
Система координат станка – это трехмерная система координат, где одно направление задано продольным направлением рельсов. Вторая координата, расположенная в той же плоскости, лежит на соединительной линии на рельсовой паре. Третья ось, напротив, проходит перпендикулярно указанной плоскости.
Система координат колесной пары также является трехмерной, причем плоскость определена двухмерной системой координат, которая расположена на задней стороне колеса, и ее начало расположено в центре колеса. Третья координата расположена перпендикулярно и проходит вдоль вала или виртуального вала.
Если колесная пара расположена на рельсах станка для анализа или обработки, то в результате измененного при эксплуатации контура колес возникнет отклонение между двумя системами координат.
Цель заключается в том, чтобы координатное направление, описывающее протяженность колеса на глубину, т.е. перпендикулярное плоскости, лежащей параллельно задней части колеса, проходило параллельно плоскости станка для обработки колес, заданной продольным направлением и поперечным направлением рельсовой системы. Кроме того, плоскость каждого колеса, проходящая параллельно задней части колеса, должна лежать перпендикулярно на плоскости рельсовой системы и проходить параллельно продольному направлению рельсов.
Так как вследствие эксплуатации колеса могут также подвергаться различной обработке относительно друг друга, что должно быть определено в целях обработки, после выравнивания одной колесной системы координат относительно системы станка могут быть определены отклонения другой колесной системы координат, и на их основании могут быть определены аналитические значения или величины обработки.
В предшествующем уровне техники определяли диаметры колес в целях выравнивания колесных пар относительно соответствующих станков. Исходя из диаметра колес получают плоскость, лежащую в высшей точке колес и проходящую параллельно плоскости рельсовой системы. Исходя из измерения диаметра определяют, какое колесо должно быть поднято, чтобы достичь плоскости, проходящей через вершину. Таким образом, затем колесную пару поднимают при помощи соответствующей роликовой системы станка для обработки или анализа.
В уровне техники было выявлено, что такой подход, с одной стороны, является довольно неточным, а с другой стороны, для того, чтобы осуществить его на практике с высокой точностью, требуется очень большой промежуток времени и большое количество замеров. Однако, проверка и, при необходимости, повторная обработка колесных пар должна быть выполнена как можно быстрее. С одной стороны, соответствующие станки для анализа и обработки являются дорогостоящими, с другой стороны, во всем мире растет количество рельсовых полотен, вследствие чего спрос на использование станков для анализа и обработки является крайне высоким.
Исходя из описанного выше предшествующего уровня техники, цель данного изобретения заключается в обеспечении способа радиального выравнивания колесных пар рельсовых транспортных средств относительно системы координат станка для диагностики колесных пар и/или для механической обработки колесных пар, причем данный способ может быть реализован быстро и с достаточной точностью.
В качестве технического решения для достижения данной цели предложен способ с признаками по пункту 1 формулы изобретения. Дальнейшие преимущества и признаки изобретения следуют из зависимых пунктов формулы изобретения.
В настоящем изобретении предусмотрено, что колесная пара содержит два колеса, которые расположены относительно друг друга, причем задние части колес обращены друг к другу. Как правило, они расположены на общей оси или валу или, как и в случае использования тележек определенного типа из уровня техники, они подвешены по отдельности так, что расположены относительно друг друга на виртуальном валу.
На первом этапе указанную колесную пару располагают в рабочей зоне станка. Как правило, подразумевается часть рельсовой системы с двумя рельсами, проходящими параллельно друг другу и выровненными относительно друг друга по высоте.
Кроме того, в предполагаемом колесном центре каждого колеса определена система координат. Ось X расположена вертикально от колесного центра, а ось Y – горизонтально. Описанная таким образом плоскость проходит параллельно задней части колеса. Ось Z, перпендикулярная системе X-Y, описывает протяженность колеса на глубину. Таким образом, соответствующее нулевое значение обеих осей X соотносится с осью станка. Таким образом, обе точки X0 расположены горизонтально по отношению к станку.
Впоследствии проводят измерение расстояния между задними частями и таким образом определяют, что Z-положение представляет собой нулевое значение на соответствующих задних частях каждого колеса.
Для каждой точки измерения определяют уникальное Z-положение, и в указанном Z-положении каждого колеса располагают по одному измерительному датчику. Посредством измерения X-положения соответствующей определенной точки измерения можно определить, выравнены ли оба колеса в радиальном направлении или нет. Затем колеса выравнивают относительно друг друга, перемещая одно из колес по вертикали, чтобы совместить X-положение точек измерения обоих колес относительно друг друга.
Таким образом, возможно очень быстрое выравнивание колесных пар в радиальном направлении по отношению к соответствующему станку.
Согласно одному аспекту изобретения Z-положение может быть определено точкой измерения на плоскости измерительной цепи. Это означает, что Z-положение определяет точку на профиле. Также допускается определение высшей точки округлой вершины реборды бандажа в качестве Z-положения. Это, некоторым образом, представляет собой специальную плоскость измерительной цепи.
В целях вертикального расположения одного из колес нижерасположенное колесо может быть поднято или вышерасположенное колесо может быть опущено, для чего со стороны станка в зависимости от станка для обработки и анализа могут использоваться опорные ролики и тому подобное.
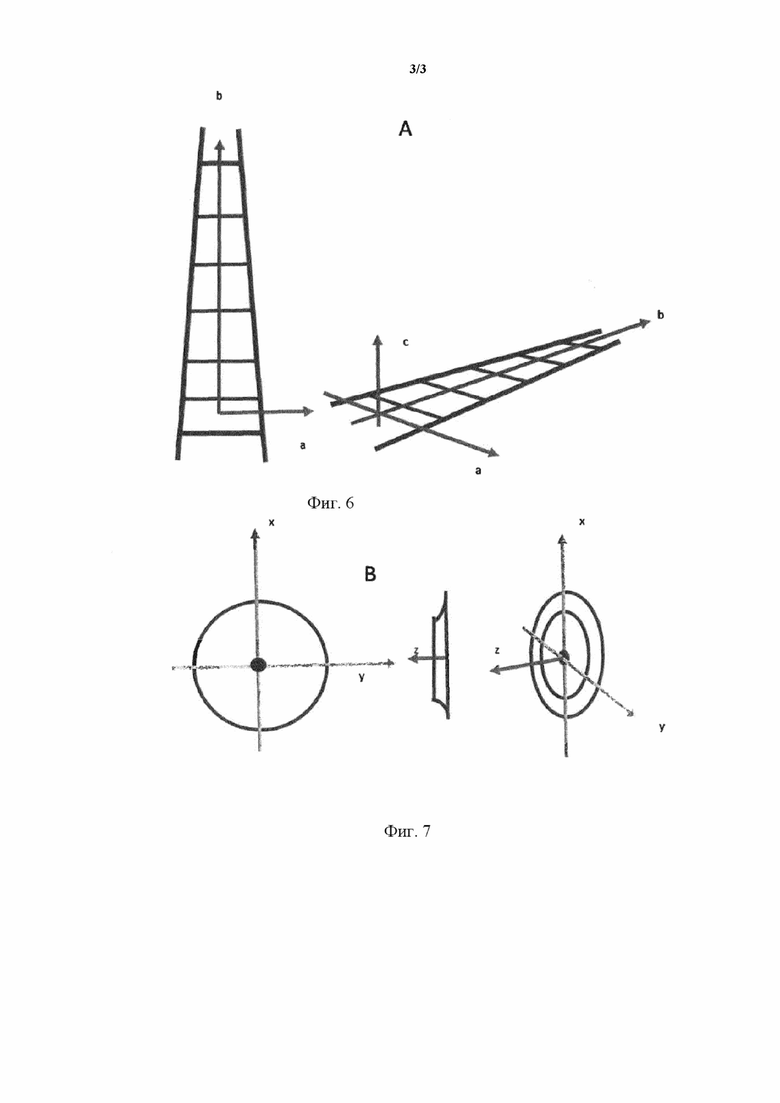
Со ссылкой на фиг. 6 и 7 повторно подробно объяснена конкретная процедура, описанная выше. На фиг. 6 стилизовано изображена рельсовая система A, на фиг. 7 стилизовано изображено колесо В в различных положениях.
Ранее было описано, что система координат станка – это трехмерная система координат, где одно направление задано продольным направлением рельсов. Вторая координата, расположенная в той же плоскости, находится на соединительной линии на паре рельсов, на фиг. 6 – это координаты a и b. Они охватывают плоскость. Перпендикулярно им расположена координата c. Таким образом образуется система координат со стороны станка.
В примере с колесной парой также изображена трехмерная система координат, в которой плоскость определена двумерной системой координат. В данном случае подразумевается плоскость в задней части колеса, начало которой расположено в центре колеса. Это координаты X и Y. Третья координата перпендикулярна им и проходит вдоль вала или виртуального вала. Это координаты X, Y и Z, как показано на фиг. 7. На центральном изображении показано, что соответствующее колесо имеет протяженность по глубине, проходящую по направлению Z.
Было описано, что соответствующие нулевые значения осей Х относятся к оси станка. Таким образом, изначально оба начала обеих систем координат обоих колес проходят по горизонтали, по меньшей мере, по виртуальной оси. Из этого следует, что подразумевается виртуальное отношение.
Согласно настоящему изобретению определено Z-положение, т.е. определено конкретное значение глубины на колесе. Затем для обоих колес определяют, какое значение X имеет данное Z-положение, т.е. при каком значении X может быть достигнут один и тот же контур колеса с Z-протяженностью. Разница между указанными двумя значениями X отображает, как реальная ось отклоняется по отношению к виртуальной оси, к которой относится ось станка. Это отклонение, ∆X, представляет собой величину, на которую поднимают или опускают соответствующую сторону.
Согласно одному из вариантов осуществления изобретения, при определении точки измерения определяют значение Y либо при Y=0, либо при любом значении Y, например, определяющем квадрант, таким образом, что соответствующее Z-положение может быть обнаружено на соответствующем другом колесе в той же самой области.
Способ, описанный в рамках изобретения, является достаточно точным и, в частности, может быть осуществлен исключительно быстро, требуя лишь минимального количества датчиков и исполнительных механизмов.
Дальнейшие преимущества и признаки настоящего изобретения следуют из приведенного ниже описания со ссылкой на чертежи. Изображено следующее:
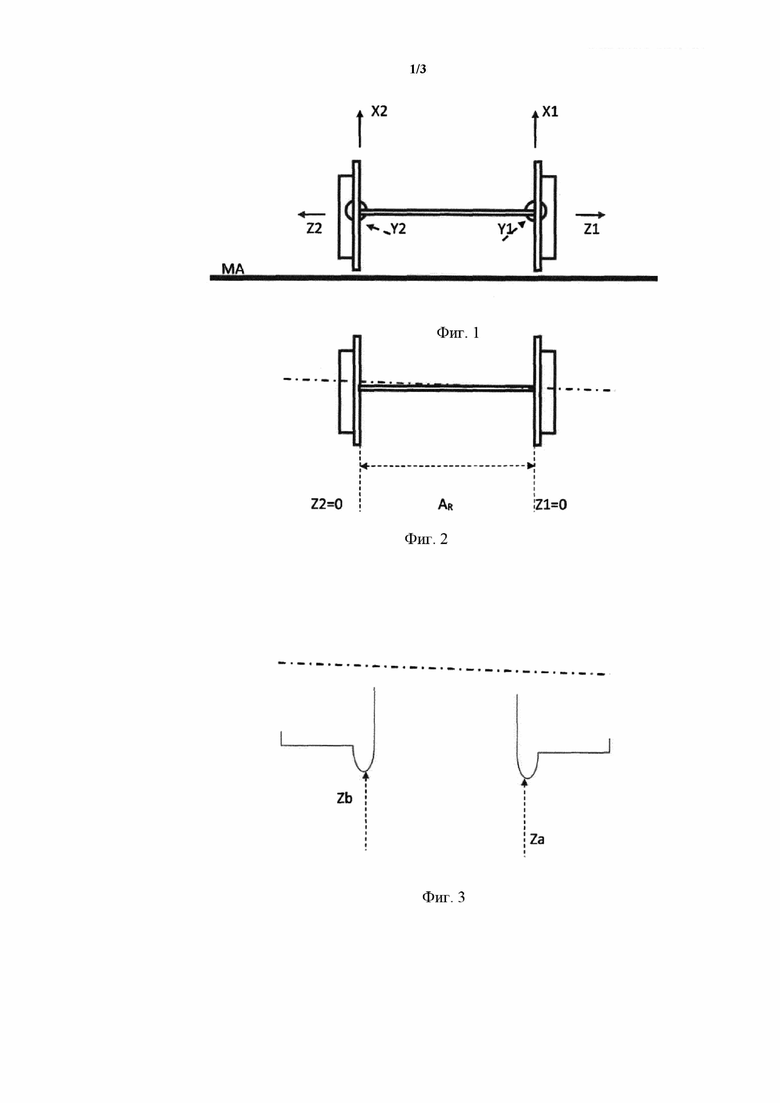
На фиг. 1 представлено схематическое изображение колесной пары для иллюстрации систем координат;
на фиг. 2 представлено изображение в соответствии с фиг. 1, иллюстрирующее первый этап способа согласно настоящему изобретению;
на фиг. 3 представлено изображение с увеличенными участками колес, иллюстрирующее следующий этап способа согласно настоящему изобретению;
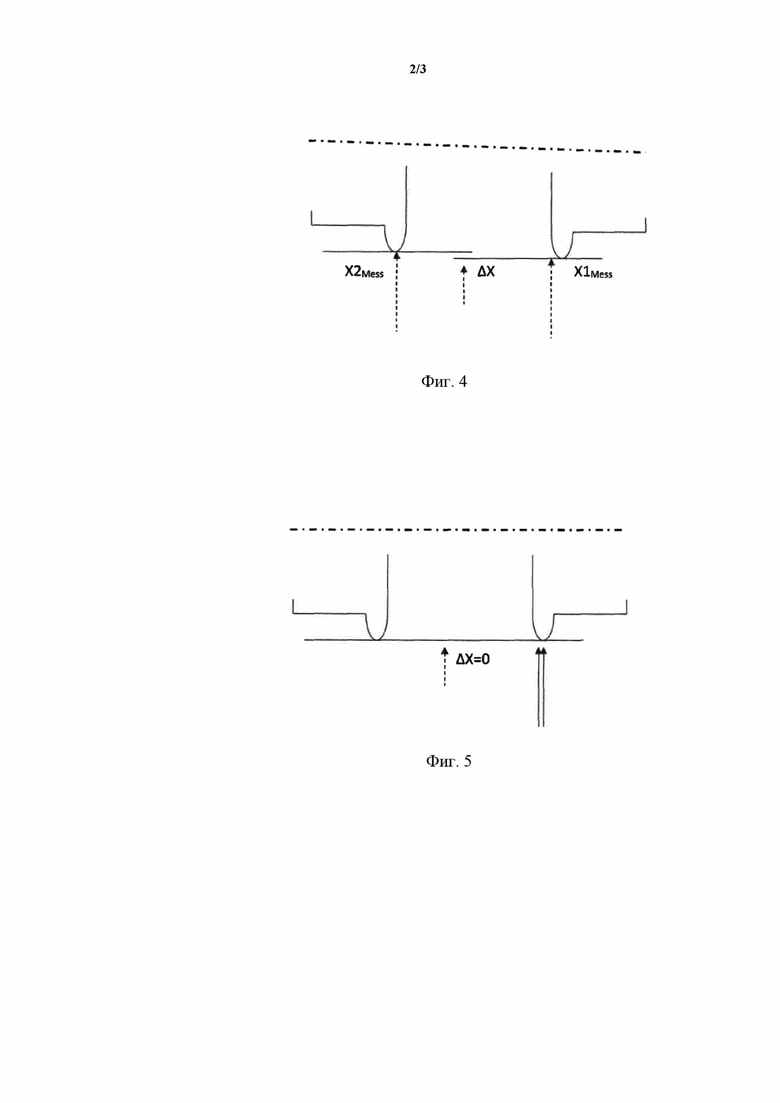
на фиг. 4 представлено изображение согласно фиг. 3, иллюстрирующее процесс измерения;
на фиг. 5 представлено изображение согласно фиг. 3, иллюстрирующее процесс выравнивания;
на фиг. 6 представлено схематическое изображение рельсовой системы; и
на фиг. 7 представлено схематическое изображение колеса в разных положениях.
На фиг. 1 изображена полностью стилизованная колесная пара с левым и правым колесом, которые соединены между собой осью. В каждом случае система координат расположена в точке пересечения оси с задней частью колеса, при этом оси Z1 и Z2 определяют горизонтальное направление, X1 и X2 определяют вертикальное направление, а Y1 и Y2 определяют лежащее в начале направление, которое также является горизонтальным. Соответствующая нулевая точка осей Z расположена в соответствующей задней части колеса. Соответствующая нулевая точка осей X относится к оси МА станка и расположена в центральной области колеса. Ввиду отнесения к оси МА станка оба начала обеих систем координат проходят по горизонтальной, по меньшей мере, виртуальной оси. За счет того, что задана нулевая точка, с одной стороны, и оси X и Z, с другой, также четко определена ось Y.
В первую очередь на первом этапе согласно фиг. 2 определяют расстояние между задними частями колес. В указанных положениях как Z1, так и Z2 представляют собой ноль.
Согласно фиг. 3, в изображенном варианте осуществления на соответствующей вершине реборды бандажа определяют точку измерения, причем Za = Zb. Это означает, что обе точки измерения проходят в направлении Z соответствующей системы координат в том же самом Z-положении, т.е. Za вдоль оси Z1 находится в том же положении, что и Zb вдоль оси Z2.
Согласно на фиг. 4 значение X измеряют для каждой из обеих точек измерения Za и Zb. Таким образом, определяют X1Mess и X2Mess. Разница между ними в данном случае представляет собой ∆X.
Согласно фиг. 5, затем, например, поднимают правое колесо в плоскости изображения по направлению Х до значения АХ = 0, т.е. оба колеса колесной пары выравниваются.
Описанный пример осуществления носит исключительно пояснительный характер и не является ограничивающим.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНЕРЦИАЛЬНЫХ ИЗМЕРЕНИЙ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2242391C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИИ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2256575C1 |
| Способ определения параметров геометрии рельсовой колеи и система для его осуществления | 2018 |
|
RU2686341C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| РАМА ХОДОВОЙ ЧАСТИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2622167C2 |
| ХОДОВАЯ ЧАСТЬ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2632236C2 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2394120C2 |
| Способ оценки состояния железнодорожного пути с использованием электронной вычислительной машины (эвм) и измерительных устройств,смонтированых в путеизмерительном вагоне | 1976 |
|
SU618476A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АБСОЛЮТНОЙ СКОРОСТИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2653767C1 |
Изобретение относится к способу радиального выравнивания колесных пар рельсовых транспортных средств относительно системы координат станка для диагностики колесных пар и/или обработки колесных пар. Способ включает следующие этапы: a) располагают колесную пару в рабочей зоне станка; b) определяют систему координат со стороны станка на предполагаемом колесном центре каждого колеса, при этом ось X соответствует протяженности по вертикали, ось Y соответствует протяженности по горизонтали и ось Z описывает полученную протяженность колеса на глубину; c) измеряют расстояние между задними частями колес и определяют Z-положение = 0 на соответствующей задней части колеса; d) определяют уникальное Z-положение для каждой точки измерения; e) располагают по одному измерительному датчику в указанном Z-положении; f) измеряют Х-положение соответствующей точки измерения; g) выравнивают колесную пару путем перемещения одного из колес по вертикали для совмещения Х-положений точек измерения обоих колес. В результате способ может быть осуществлен быстро и с достаточной точностью. 4 з.п. ф-лы, 7 ил.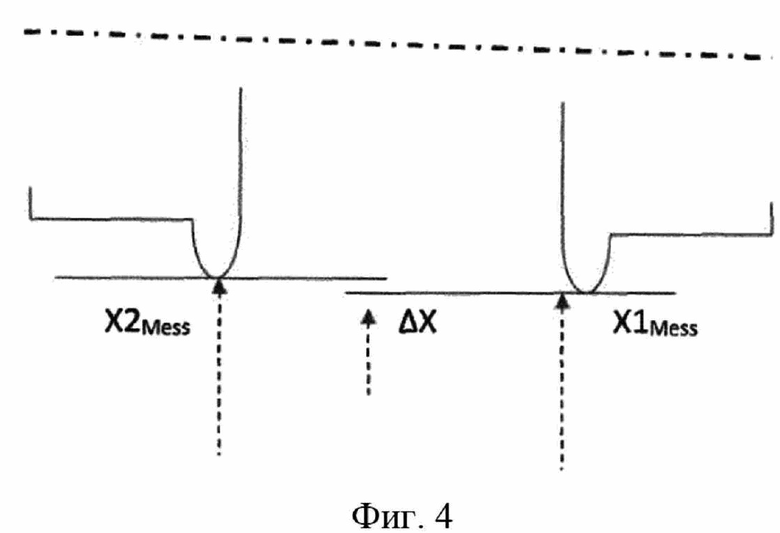
1. Способ радиального выравнивания колесных пар рельсовых транспортных средств относительно системы координат станка для диагностики колесных пар и/или обработки колесных пар, при этом колесная пара включает два колеса, расположенные на общей оси с направленными друг к другу задними частями колес, отличающийся тем, что способ включает следующие этапы, на которых:
a) располагают колесную пару в рабочей зоне станка;
b) определяют систему координат со стороны станка на предполагаемом колесном центре каждого колеса, при этом ось X соответствует протяженности по вертикали, ось Y соответствует протяженности по горизонтали и ось Z описывает полученную протяженность колеса на глубину;
c) измеряют расстояние между задними частями колес и определяют Z-положение = 0 на соответствующей задней части колеса;
d) определяют уникальное Z-положение для каждой точки измерения;
e) располагают по одному измерительному датчику в указанном Z-положении;
f) измеряют Х-положение соответствующей точки измерения;
g) выравнивают колесную пару путем перемещения одного из колес по вертикали для совмещения Х-положений точек измерения обоих колес.
2. Способ по п. 1, отличающийся тем, что Z-положение точки измерения определяет плоскость измерительной цепи.
3. Способ по любому из предыдущих пунктов, отличающийся тем, что высшая точка округлой вершины реборды бандажа определена как Z-положение.
4. Способ по любому из предыдущих пунктов, отличающийся тем, что для совмещения Х-положений точек измерения обоих колес опускают вышерасположенное колесо.
5. Способ по любому из пп. 1-3, отличающийся тем, что для совмещения Х-положений точек измерения обоих колес поднимают нижерасположенное колесо.
| CN 106769116 A, 31.05.2017 | |||
| AU 2015261670 B2, 17.12.2015 | |||
| DE 102013111526 A1, 23.04.2015 | |||
| МАШИНА ДЛЯ ПОЛУЧЕНИЯ МНОГОФАЗНОГО КОНДИТЕРСКОГО ИЗДЕЛИЯ И СПОСОБ ЕГО ПОЛУЧЕНИЯ | 2006 |
|
RU2402227C2 |
| УСТРОЙСТВО РАДИАЛЬНОЙ УСТАНОВКИ КОЛЕСНЫХ ПАР И ИХ ПАРАЛЛЕЛЬНОГО ПОВОРОТА ТРЕХЭЛЕМЕНТНЫХ ДВУХОСНЫХ ТЕЛЕЖЕК ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2002 |
|
RU2228277C1 |

