Область техники, к которой относится изобретение
Изобретение относится к захватному устройству для обнаружения, зажима и освобождения катушек. Захватное устройство позволяет автоматизировать манипулирование катушками в промышленных условиях.
Уровень техники
При производстве удлиненных изделий, таких как пряжа, нити, канаты, корды, стальные корды и подобные изделия, конечные и промежуточные продукты расположены на катушках. Количество захватов катушек, например, для изготовления одной окончательной катушки простой конструкции со стальным кордом, такой как 7×7, легко превышает сто, так как необходимо не только захватывать полные катушки, но и удалять пустые. Поэтому изготовление упомянутых изделий в значительной степени сводится к действиям, связанным с захватом, перемещением и размещением пустых и полных катушек. Поэтому существует постоянное желание уменьшить такое количество манипуляций, например, посредством увеличения емкости катушек или автоматизации манипуляций для решения этой утомительной и трудоемкой задачи.
При автоматизации захвата полной или пустой катушки инженеры сталкиваются со сложной и динамичной производственной средой. Действительно, настоящая производственная среда сильно отличается от виртуальной среды, определяемой в компьютере. В реальной жизни не все полы производственного цеха являются плоскими, не все машины выровнены, как хотелось бы, не все столы для подбора изделий имеют одинаковую высоту с точностью до миллиметра. Операторы-люди не испытывают ни малейшего затруднения в действиях в этой нерегулярной и иногда случайной среде, но эти затруднения испытывают автоматы.
Чтобы раздробить сложную задачу на составные части, обычно прибегают к нескольким уровням интеллекта, при этом глобальное устройство управления имеет общую приблизительную картину машинного зала, в то время как локальные устройства управления преодолевают окончательные отклонения в конце процесса. Затем эти локальные устройства управления должны «найти свой путь» на основе входных данных, которые собираются локально, и с помощью локальных алгоритмов находят, например, точное положение катушки. В качестве последнего этапа катушку необходимо механически захватить или освободить.
Известны механические захватные устройства для катушки, позиционируемые под воздействием человека и приводимые в действие человеческой силой или механической энергией. Такие захватные устройства для катушки могут, например, захватывать круглый фланец катушки. Пример такого фланцевого зажима описан в документе US 2009057479. В качестве альтернативы захватные устройства для катушки могут вставляться в посадочное отверстие катушки и зажимать катушку с помощью клешневых захватов, которые входят в канавку внутри посадочного отверстия. Пример этого можно найти в документе US 6082796.
Алгоритмы для определения положения отверстия, предпочтительно отверстия круглой формы, в основном основываются на изображении от камеры, как, например, описано в документе US 5771309. Такие способы требуют использования ПЗС-камер, которые являются относительно дорогими.
В документе ЕР 1900665 В1 описано захватное устройство для бобины, имеющее компоненты для захвата бобины и сенсорное устройство, содержащее датчики определения дальности. Датчики расположены в двух модулях, в результате чего, при прохождении границы бобины, по меньшей мере один из модулей обнаруживает четыре точки перехода. Координаты этих четырех точек перехода используются для вычисления центра окружности, содержащей эти координаты.
Альтернативный способ нахождения центра отверстия в пластине описан в документе US 2016/0158884. В данном случае лазерная головка следует извилистой траектории, чтобы найти центр калибровочного отверстия. Это делает поиск положения центра трудоемким, поскольку необходимо следовать извилистой траектории.
Дополнительный алгоритм описан в документе DE 102007013623 А1, в котором выполняются два взаимно ортогональных линейных сканирования. Первое сканирование обнаруживает первую пару граничных точек на границе отверстия, и вычисляется первая средняя точка между этими граничными точками. Второе сканирование, ортогональное первому сканированию, проходит через эту первую среднюю точку и определяет пересечение линии с краем отверстия, что приводит ко второй паре граничных точек, для которых вычисляется вторая средняя точка. Вторая средняя точка находится уже близко к центру отверстия. Третье сканирование, ортогональное второму сканированию, проходит через вторую среднюю точку, и определяется третья пара граничных точек. На основании этих точек рассчитывается окончательная центральная точка. Процедура требует выполнения ряда взаимно ортогональных сканирований.
Чтобы найти более быстрые способы, которые требуют меньших затрат на оборудование, изобретатели придумали решение, которое будет описано ниже.
Раскрытие сущности изобретения
Основной задачей изобретения является устранение описанных недостатков предшествующего уровня техники: слишком дорогое оборудование и/или слишком медленное определение центра отверстия. Второй задачей является предоставление алгоритмов и способов, которые позволяют быстро и надежно определять посадочное отверстие катушки. Способы используются для локального направления захватного устройства для катушки в сторону катушки и ее зажима быстрым и надежным образом. Третья задача состоит в том, чтобы создать захватное устройство, которое особенно подходит для нахождения и захвата катушек в промышленной среде.
Согласно первому аспекту изобретения, захватное устройство для обнаружения, зажима и освобождения катушек заявлено в независимом пункте формулы изобретения. Катушки для захвата должны иметь «круглую захватываемую часть». Круглая захватываемая часть может быть, например, фланцем катушки или посадочным отверстием. Альтернативно, захватываемая часть может представлять собой специально предусмотренный концентрический фланец, который захватное устройство может обнаруживать и использовать для зажима катушки. Нет никаких ограничений для захватываемой части, кроме того, что она должна быть круглой и должна позволять захватывать ее с помощью «управляемого зажима».
Действительно, захват содержит «управляемый зажим» для зажима и освобождения захватываемой части по требованию. Термин «управляемый» означает, что зажим может приводиться в действие механическим, электрическим, магнитным, пневматическим, гидравлическим или любым другим источником энергии. Зажим может перемещаться по команде в заданном направлении в координатной плоскости или параллельно базовой оси. Под термином «по требованию» подразумевается, что зажим открывается или закрывается в зависимости от входного сигнала, подаваемого на зажим. Зажим имеет базовую ось, которая перемещается и поворачивается вместе с зажимом. Когда зажим удерживает катушку за захватываемую часть, ось катушки совпадает с базовой осью управляемого зажима. Базовая ось определяет координатную плоскость, которая ориентирована перпендикулярно к базовой оси. Зажим имеет размер зажима, соответствующий диаметру круглой захватываемой части катушки, чтобы сопрягаться с круглой захватываемой частью катушки, захватывать или зажимать ее.
Захватное устройство дополнительно содержит систему сканирования. Сканирующая система выполнена с возможностью идентификации и поиска захватываемой части на подлежащей захвату катушке. Система сканирования содержит два или более датчиков, расположенных на одинаковом расстоянии вдоль линии. Линия, предпочтительно, является прямой, так как это приводит к самым простым вычислениям. Предпочтительно, все датчики находятся на одной линии.
Датчики обнаруживают только присутствие или отсутствие тела, такого как катушка, в направлении, параллельном базовой оси. Во время перемещения захватного устройства датчики могут переключаться из состояния, в котором тело не обнаружено, в состояние, в котором тело обнаружено в пределах дальности действия датчика. И наоборот, с одинаковым успехом может быть случай, когда сначала обнаруживается тело в пределах дальности действия, а после перемещения тело не обнаруживается. Оба изменения состояния обнаружения будут называться «переходом». Не требуется, чтобы дальность действия датчика превышала одного метра, например, дальность действия может быть полметра. Предпочтительно, датчики имеют боковое разрешение ниже одного сантиметра, например, ниже 3 или 2 мм.
Датчики являются «детекторами присутствия-отсутствия», и их работа может, например, основываться на отражении света. Датчик испускает коллимированный луч света, а также обнаруживает свет, отраженный телом, препятствующим прохождению светового луча. Обычно для этой цели можно использовать лазерный или коллимированный светодиодный свет, возможно, с частотной модуляцией, чтобы увеличить предел обнаружения. Датчик также может определять расстояние от датчика до отражающего тела, но это делает датчик более дорогим. Используемая длина волны может быть в инфракрасном, видимом или ультрафиолетовом спектре. Преимуществом видимого света является то, что пятна луча становятся видимыми человеческому глазу на катушке при перемещении захватного устройства.
Также могут быть рассмотрены альтернативные направленные датчики, такие как акустические датчики, хотя они могут быть не дешевыми, и при этом не улучшат результаты.
Расстояние между любыми двумя смежными, соседними датчиками (в дальнейшем называемое «Δ») меньше размера зажима. Расстояние между соседними датчиками определяет «разрешение» системы сканирования. Очевидно, что лучше всего, если расстояние между соседними датчиками меньше размера зажима, чтобы не пропустить какие-либо захватываемые части, когда они проходят мимо системы датчиков. Еще более предпочтительно, если расстояние между двумя соседними датчиками составляет от четверти до трех четвертей размера зажима. Лучше всего, если расстояние между соседними датчиками составляет от четверти до половины размера зажима по причинам, которые станут очевидными позже.
Количество датчиков составляет два или более. Если в системе сканирования присутствуют два, три или четыре датчика, глобальное позиционирование захвата должно быть достаточно хорошим, прежде чем начнется процесс обнаружения, чтобы предотвратить необходимость многократных перемещений. И наоборот, от пяти до десяти датчиков будут увеличивать ширину обнаружения системы сканирования, но, конечно, это будет иметь свою цену. Захватное устройство также может стать несоразмерно широким, препятствуя таким образом перемещению захватного устройства на роботизированной руке. Наиболее предпочтительным является присутствие двух датчиков, поскольку это наименее затратно.
Когда базовая ось зажима находится на серединном перпендикуляре двух соседних датчиков, перемещение управляемого зажима уменьшается, поскольку два соседних датчика являются ближайшими к базовой оси. Это является предпочтительным размещением, если число датчиков является четным. В качестве альтернативы, если число датчиков нечетное, лучше всего, чтобы базовая ось находилась на перпендикуляре, перпендикулярном линии датчиков, а средний датчик находился в точке основания этого перпендикуляра.
Перпендикулярное расстояние d в координатной плоскости между базовой осью и линией, образованной упомянутыми двумя или более датчиками, предпочтительно, меньше размера зажима. Таким образом, перемещение захвата после идентификации положения центра захватываемой части сводится к минимуму. Преимущество этого заключается в том, что легко устанавливается местоположение центра катушки и меньше времени теряется при перемещении зажима. В качестве альтернативы это перпендикулярное расстояние должно быть больше половины диаметра захватываемой части, чтобы предотвращать перемещение захвата назад после идентификации положения центра захватываемой части.
Когда круглая захватываемая часть катушки является посадочным отверстием катушки, зажим может иметь форму стержня, который (при достаточном люфте) соответствует посадочному отверстию и удерживает катушку с помощью посадочного отверстия. Размер зажима в этом случае равен диаметру стержня. Стержень может обеспечиваться несколькими равномерно распределенными подпружиненными клешневыми захватами. В посадочном отверстии имеется внутренняя периферическая канавка, в которую при вставлении стержня помещаются клешневые захваты, чтобы удерживать катушку на зажиме. Чтобы освободить зажим, клешневые захваты радиально отводятся, что позволяет стержню выходить из посадочного отверстия.
Когда круглая захватываемая часть катушки представляет собой фланец катушки, зажим может иметь подпружиненные круговые сегменты с канавками, которые удерживают фланец, когда происходит скольжение по фланцу. Размер зажима в этом случае равен диаметру круга, образованного круговыми сегментами с канавками, когда зажим закрыт, т. е. равен диаметру фланца. Для удаления зажима круговые сегменты перемещаются в радиальном направлении, освобождая таким образом фланец.
Согласно второму аспекту изобретения, заявлен способ управления захватным устройством, описанным выше. Существуют два основных режима работы захватного устройства: один, в котором диаметр круглой захватываемой части является известным, и другой, в котором этот диаметр неизвестен. В описании способа идентичные этапы будут обозначаться одинаковыми буквами ((a), (b), …). Если этапы повторяются или изменяются, буквы будут обеспечиваться апострофом ((e), (e'), …). Для удобства предполагается, что два или более датчиков располагаются вдоль оси X с увеличением значения X слева направо, если смотреть в направлении излучения датчиков. Положение двух или более датчиков известно и кратно расстоянию между соседними датчиками. Перпендикуляр к линии датчиков через базовую ось определяет значение x = 0. Количество датчиков будет обозначено как «N», при этом N = 2, 3, 4 или любому положительному целому числу. Таким образом, общая ширина системы сканирования составляет (N - 1) × Δ. Ось Y ориентирована в направлении, перпендикулярном оси X, и увеличивается вдоль направления перемещения захватного устройства.
Первый режим работы функционирует следующим образом.
На этапе (а) захватное устройство располагается в вблизи катушки таким образом, что базовая ось захватного устройства примерно является параллельной (в пределах ±5°) катушке, которую необходимо захватить. Под термином «вблизи» подразумевается, что базовая ось находится от оси катушки на расстоянии в пределах двух или трех диаметров круглой захватываемой части. Захватное устройство может быть, например, закрепленным на механическом рычаге, установленном на транспортном средстве с автоматическим управлением. В качестве альтернативы захватное устройство может быть установлено на манипуляторе робота, который перемещается на верхних направляющих рельсах на заводе. В качестве еще одной альтернативы захватное устройство может быть прикреплено к машине, которую оно обслуживает.
Начальное позиционирование захватного устройства выполняется на основе входных данных от глобального устройства управления, которое имеет представление о том, где располагаются катушки (в трехмерном пространстве (x, y, z)), как они ориентированы (два угла) и каковы их размеры (приблизительная длина и диаметр, возможно, дополненные размером посадочного отверстия). Например, глобальное устройство управления управляет рычагом, на котором располагается захватное устройство. Для простоты ориентация катушки будет сохраняться либо вертикальной, то есть с посадочным отверстием, ориентированным вдоль направления силы тяжести, либо горизонтально, то есть с посадочным отверстием в плоскости, перпендикулярной вертикали. Однако способ одинаково хорошо подходит для других отклоняющихся ориентаций.
Перемещение захватного устройства контролируется локальным устройством управления. Например, перемещение рычага, на котором установлено захватное устройство, находящееся под контролем глобального устройства управления, теперь осуществляется локальным устройством управления. Локальное устройство управления управляет приводными механизмами, которые могут перемещать захватное устройство в координатной плоскости и вдоль базовой оси. Возможен вариант, в котором локальное устройство управления может управлять локальной ориентацией захвата, но это не является обязательным условием способа согласно изобретению.
На этапе (b) локальное устройство управления информируется глобальным устройством управления о диаметре круглой захватываемой части. Значение диаметра является входным для локального устройства управления.
На этапе (c) захватное устройство перемещается в координатной плоскости. Перемещение всегда выполняется в направлении, в котором два или более датчиков находятся перед базовой осью, т.е. рабочая зона датчика находится перед зажимом. Предпочтительно, перемещение происходит в направлении, перпендикулярном линии, образованной двумя или более датчиками. Перемещение является относительно медленным (от 1 до 10 см/с), чтобы позволять локальному устройству управления записывать пройденное расстояние от нулевого значения. Общее перемещение захватного устройства находится в пределах ограниченной длины перемещения. Например, оно ограничено аппаратными средствами, и для захватного устройства оно устанавливается равным или примерно равным двум диаметрам фланца катушки или любому другому разумному значению. Это необходимо для предотвращения возможного ошибочного размещения катушек, например катушек, которые не представлены, в отличие от того, что предполагает глобальное устройство управления. Начальное положение захватного устройства при захвате с помощью локального устройства управления используется в качестве точки отсчета в направлении перемещения (y = 0).
На этапе (d) захватное устройство перемещается, и первый переход круглой захватываемой части обнаруживается с помощью какого-либо из датчиков, который, таким образом, становится «первым датчиком». Положение первого датчика является известным, и пройденное расстояние регистрируется, следовательно, можно зарегистрировать первую точку (x1, y1).
Этап (d) продолжается как этап (d') до тех пор, пока не обнаруживается второй переход круглой захватываемой части каким-либо из датчиков, который в этом случае является «вторым датчиком». Аналогичным образом, положение второго датчика и пройденное расстояние являются известными, и можно записать вторую точку (x2, y2).
На этапе (f) на основе координат первой и второй точек и известного диаметра захватываемой части локальное устройство управления вычисляет положение центра круглой захватываемой части в координатной плоскости. В общем случае будет два решения, но одно из них может быть легко исключено.
На этапе (g) базовая ось захватного устройства перемещается в это вычисленное положение центра.
Процедура завершается этапом (h), на котором захватное устройство зажимает и удерживает катушку за круглую захватываемую часть. Например, это может быть выполнено посредством введения стержня в посадочное отверстие катушки или посредством зажима фланца катушки.
В способе могут встречаться два разных случая. В первом случае первый и второй датчики являются разными датчиками, которые обязательно являются соседними датчиками. В этом случае выбираемое на этапе (f) решение - это решение, имеющее наибольшую y-координату. Если бы было выбрано решение с более низкой координатой y, это привело бы к противоречию с направлением перемещения датчиков, т.е. эта конфигурация была бы обнаружена ранее при перемещении захватного устройства, следовательно, первая и вторая точки не были бы первой и второй обнаруженными точками.
Во втором случае первый и второй датчики являются одним и тем же датчиком, то есть этот один датчик, например внешний датчик, обнаруживает первую и вторую точку, а соседние датчики не обнаруживают никакого перехода. В этом случае решение, которое должно быть выбрано на этапе (f), является решением с x-координатой центра со стороны, противоположной необнаруживающему датчику или датчикам. Однако для этого необходимо, чтобы расстояние между датчиками было меньше половины диаметра круглой части, в противном случае могут сканироваться области, в которых не определено, какое решение должно быть выбрано.
Общая ширина, при которой центр захватываемой части может быть идентифицирован и рассчитан захватным устройством, будет называться «шириной W сканирования». В первом режиме работы будет обнаружен любой переход в пределах диапазона, немного меньшем, чем (N - 1) × Δ + 2 × R. Где «R» соответствует половине диаметра для круглой захватываемой части. Но только когда Δ < R, центр может быть однозначно идентифицирован. Следовательно, значение W чуть меньше, чем (N + 1) × R.
Во втором режиме работы диаметр круглой части катушки не используется при вычислении положения центра круглой захватываемой части локальным устройством управления. Этап (а) идентичен тому этапу, который выполняется в первом режиме работы. Однако, поскольку диаметр круглой части катушки не используется, этап (b) является необязательным и может быть опущен.
Этапы (d) и (d') остаются такими же, как в первом режиме работы, но теперь процедура продолжается этапом (d''), в котором третий переход при присутствии круглой захватываемой части обнаруживается третьим датчиком и пройденное расстояние при этом третьем переходе записывается как третья точка (x3, y3).
Следовательно, известны три точки (x1, y1), (x2, y2) и (x3, y3). Основываясь на трех точках окружности, может быть однозначно определено положение ее центра (x0, y0), что выполняется на этапе (f’). Остальные этапы (g) и (h) остаются такими же, как в первом режиме работы.
Во втором режиме работы первый случай возникает тогда, когда три точки обнаруживаются тремя разными датчиками. Это может произойти только в том случае, если расстояние между соседними датчиками меньше половины диаметра круглой части.
Два других эквивалентных случая могут возникать тогда, когда третий датчик приравнивается первому датчику, или когда третий датчик приравнивается второму датчику. В этом случае вычисление центральной точки круглой части катушки несколько проще. Кроме того, в этом случае расстояние «Δ» между датчиками должно быть немного меньше, чем R, чтобы всегда «поймать» по меньшей мере 3 точки. С другой стороны, в этом режиме работы, когда краевые датчики обнаруживают только два перехода, центр не может быть вычислен. Следовательно, максимальная ширина сканирования составляет чуть меньше, чем (N - 1) × R.
Когда три точки окружности известны и ее центр вычислен, радиус «R» можно легко определить как расстояние от центра до любой из трех точек. Следовательно, диаметр круглой захватываемой части в два раза больше этого радиуса, то есть составляет 2R. В принципе, эта информация является избыточной, но она может быть полезна в том случае, если также известен диаметр круглой захватываемой части из других источников, например, из глобального устройства управления.
Следовательно, в дополнительном предпочтительном варианте осуществления изобретения для второго режима работы вводится этап (b), где диаметр круглой захватываемой части является входными параметром, подаваемым в локальное устройство управления глобальным устройством управления. Теперь, рассчитав диаметр круглой захватываемой части и сравнив его с входным значением, можно установить, готова ли катушка, как ожидалось, к захватыванию. Например, если относительная разница между значениями превышает 1, 2 или даже 5%, может быть выдан сигнал тревоги, чтобы инициировать корректирующее действие. Это то, что происходит на этапе (f'').
Конечно, может случиться так, что положение захвата будет за пределами ширины W сканирования. В этом случае этап (c) заканчивается на ограниченной длине перемещения. Это означает, что в первом или втором режиме работы переход не был обнаружен. Когда это происходит, захват перемещается в исходное положение, смещаясь вдоль линии датчиков на расстояние, равное расстоянию «Δ» между соседними датчиками, умноженному на количество «N» датчиков, и сканирование перезапускается, т.е. этап (c) повторяется.
Разумным ограничением длины перемещения является случай, когда захватное устройство переместилось на диаметр круглой захватываемой части после обнаружения первого перехода. В качестве альтернативы, ограниченная длина перемещения достигается в том случае, когда достигается половина диаметра круглой захватываемой части.
Преимущество захватного устройства состоит в том, что датчики перемещаются перед зажимом. Следовательно, перемещение захватного устройства назад не требуется (до тех пор, пока не достигнута ограниченная длина перемещения). Это предотвращает перемещения вперед-назад, которые могут запутать отслеживание местоположения устройством управления из-за ускоряющих сил.
Краткое описание чертежей
На фиг. 1 показан общий вид захватного устройства согласно изобретению в его наиболее общей форме;
на фиг. 2а и 2b - первый и второй случай первого режима работы;
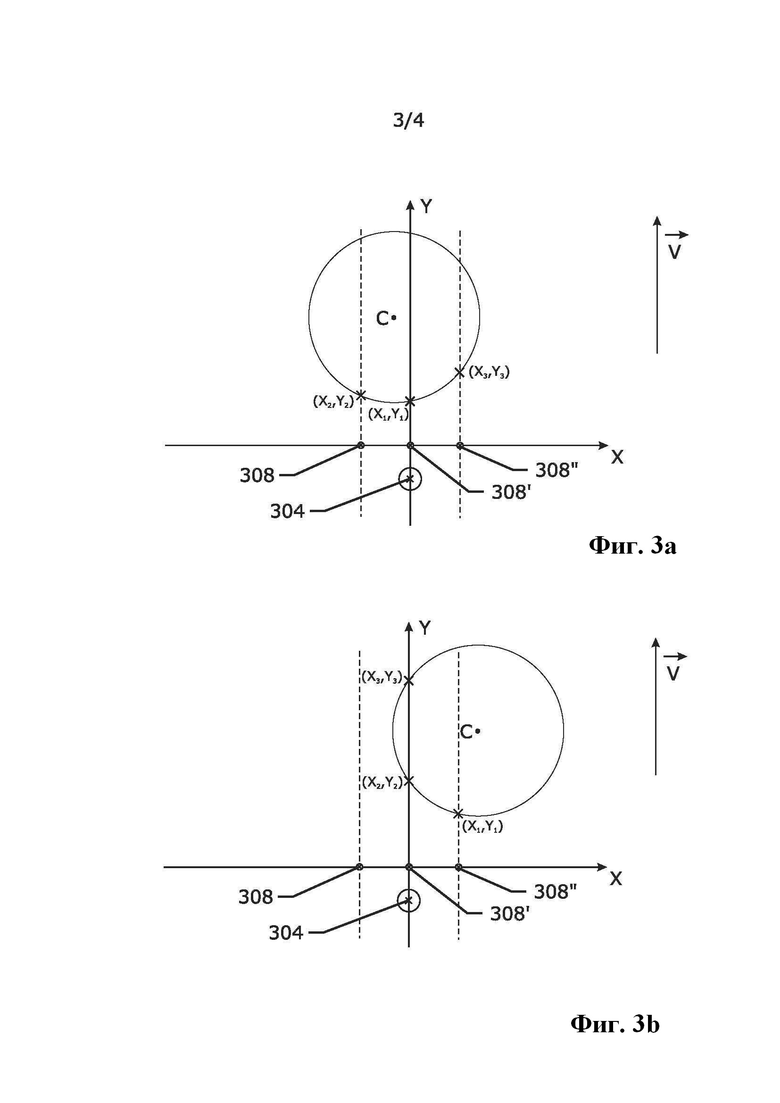
на фиг. 3а и 3b - первый и второй случай второго режима работы;
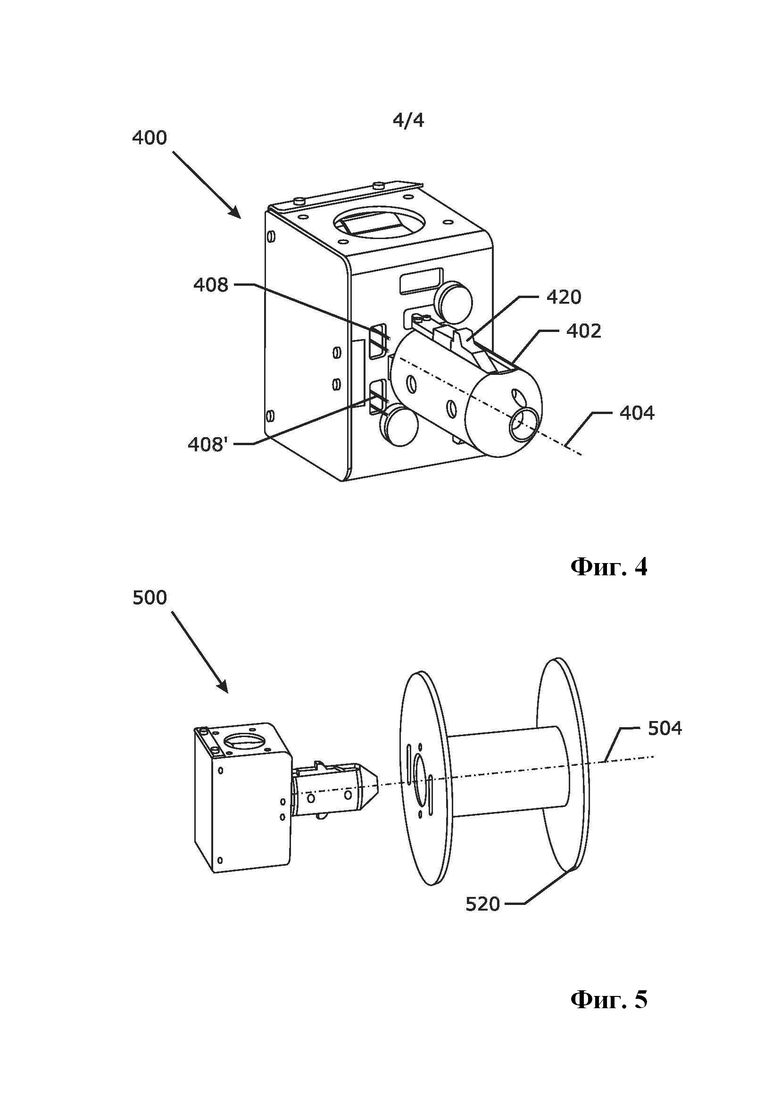
на фиг. 4 - фактический вариант выполнения захватного устройства;
на фиг. 5 - выравнивание захватного устройства с катушкой.
Одинаковые части на разных фигурах имеют одинаковые номера в разрядах единиц и десятков, тогда как число сотен относится к номеру фигуры.
Осуществление изобретения
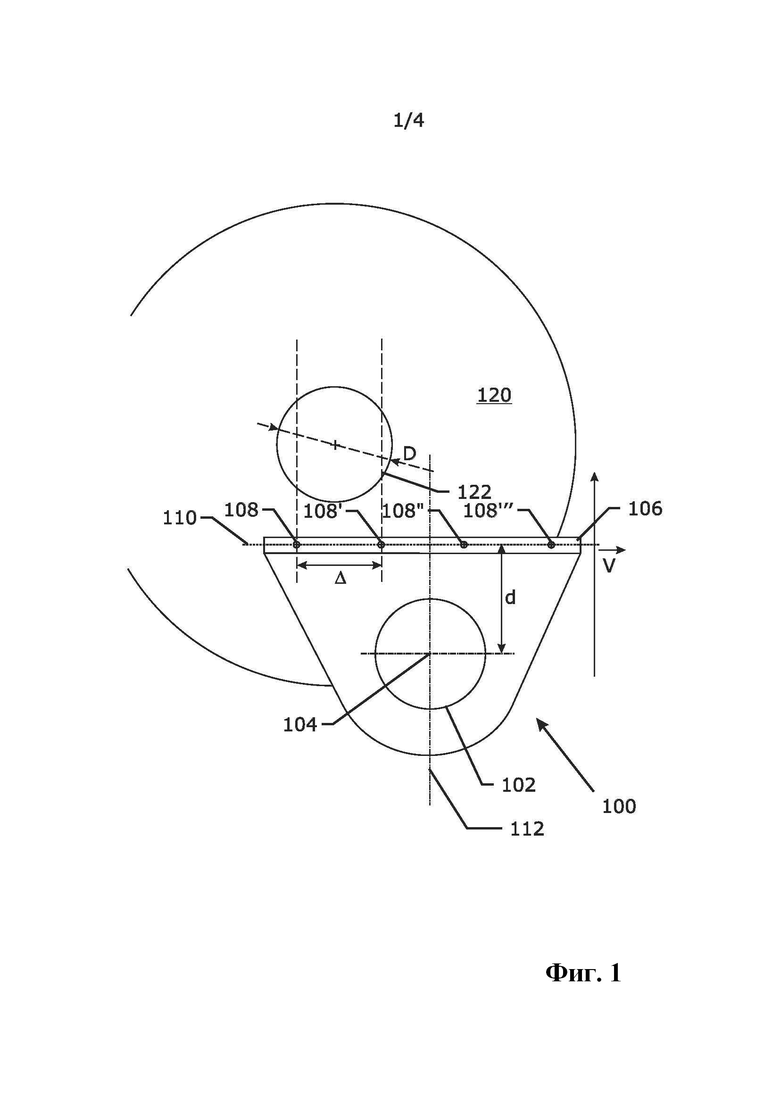
На фиг. 1 показан вид сверху общего варианта выполнения захватного устройства 100. Захватное устройство содержит управляемый зажим 102, который устанавливается на рычаге робота, или транспортного средства с автоматическим управлением, или подобного устройства (не показано). Зажим 102 имеет базовую ось, которая обозначена позицией 104 и в данном случае перпендикулярна плоскости листа. Катушка, подлежащая захватыванию, обозначена позицией 120 и имеет круглую захватываемую часть 122, которая в этом случае является посадочным отверстием катушки 120. Круглая захватываемая часть 122 имеет диаметр, обозначенный как «D». Размер зажима, соответствующий диаметру зажима 102, таким образом, немного меньше D, чтобы можно было вставлять зажим в посадочное отверстие. Захватное устройство имеет сканирующую систему 106, состоящую из четырех датчиков, обозначенных позициями 108, 108', 108'', 108''' и расположенных на линии 110. Датчики расположены на расстоянии «Δ» друг от друга. Расстояние Δ чуть меньше D/2, например 0,45 × D. Датчики определяют присутствие или отсутствие корпуса катушки 120 в направлении, параллельном базовой оси 104. Датчики представляют собой, например, фотоэлектрические датчики отсутствия/присутствия, основанные на отражении света, такие как датчики серии Keyence LR-W.
Базовая ось 104 расположена на серединном перпендикуляре 112, проходящем между двумя соседними датчиками 108' и 108''. Перпендикулярное расстояние между базовой осью 104 и линией 110 датчиков обозначено как «d». Значение «d» меньше диаметра D, но больше D/2. Во время использования захватное устройство сканирует присутствие круглой захватываемой части в направлении  параллельном направлению серединного перпендикуляра 112.
параллельном направлению серединного перпендикуляра 112.
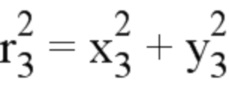
Первый режим работы захватного устройства проиллюстрирован на фиг. 2а и 2b. Здесь для иллюстрации работы приведен случай использования двух датчиков (N = 2). Фиксированная система координат имеет ось X, проходящую вдоль линии 210 датчиков и ось Y, проходящую вдоль серединного перпендикуляра 212. Координаты «y» увеличиваются с перемещением захвата в направлении  Следовательно, первый датчик 208 первоначально расположен в координатах (-Δ/2, 0), а второй датчик - в координатах (+Δ/2, 0). Базовая ось 204 первоначально расположена в точке (0, -d). По мере перемещения захватного устройства X-координаты остаются неизменными, но Y-координаты увеличиваются. Когда локальное устройство управления принимает управление, Y-координата обнуляется.
Следовательно, первый датчик 208 первоначально расположен в координатах (-Δ/2, 0), а второй датчик - в координатах (+Δ/2, 0). Базовая ось 204 первоначально расположена в точке (0, -d). По мере перемещения захватного устройства X-координаты остаются неизменными, но Y-координаты увеличиваются. Когда локальное устройство управления принимает управление, Y-координата обнуляется.
Сначала захватное устройство располагается в вблизи катушки, и базовая ось 204 выравнивается с осью катушки под управлением глобального устройства управления. Глобальное устройство управления также указывает направление  перемещения для локального устройства управления. Диаметр D круглой захватываемой части передается на локальное устройство управления глобальным устройством управления. Затем управление перемещением передается локальному устройству управления. Радиус круглой захватываемой части обозначен как «R» на фиг. 2 и равен D/2.
перемещения для локального устройства управления. Диаметр D круглой захватываемой части передается на локальное устройство управления глобальным устройством управления. Затем управление перемещением передается локальному устройству управления. Радиус круглой захватываемой части обозначен как «R» на фиг. 2 и равен D/2.
Затем локальное устройство управления медленно перемещает захватное устройство в направлении 
 в координатной плоскости так, что два датчика 208 и 208' находятся перед базовой осью 204. В точке (x1, y1) происходит первый переход (от фланца катушки к посадочному отверстию), который определяется датчиком 208, определяющим первую точку с координатами (-Δ/2, y1), где «y1» - расстояние, пройденное вдоль направления . Сканирование продолжается до тех пор, пока второй датчик 208' не обнаружит второй переход (опять от фланца катушки к посадочному отверстию) в точке (x2, y2). Таким образом, вторая точка имеет координаты (+Δ/2, y2).
в координатной плоскости так, что два датчика 208 и 208' находятся перед базовой осью 204. В точке (x1, y1) происходит первый переход (от фланца катушки к посадочному отверстию), который определяется датчиком 208, определяющим первую точку с координатами (-Δ/2, y1), где «y1» - расстояние, пройденное вдоль направления . Сканирование продолжается до тех пор, пока второй датчик 208' не обнаружит второй переход (опять от фланца катушки к посадочному отверстию) в точке (x2, y2). Таким образом, вторая точка имеет координаты (+Δ/2, y2).
Теперь локальное устройство управления вычисляет положение центра «C» круглой захватываемой части следующим образом.
Сначала вычисляется расстояние ’а’ между первой и второй точками:


Затем рассчитывается величина «A»:
Теперь два возможных решения для центра «C» имеют следующие координаты (x0, y0):
 и
и 
В этом случае должно быть выбрано решение с самым высоким значением y0, так как другое решение, обозначенное позицией 222' на фиг. 2а, не будет соответствовать положению первой и второй обнаруженных точек:
 и
и 
Следует обратить внимание, что если датчик 208' обнаружит первый переход, знак x0 должен быть обратным.
Во втором случае первого режима работы один из датчиков 208 обнаруживает первый переход (от фланца катушки к посадочному отверстию), и тот же самый датчик 208 также обнаруживает второй переход (от посадочного отверстия к фланцу), в то время как другой датчик 208' не обнаруживает никакого перехода. В этом случае координаты (x1, y1) будут (-Δ/2, y1), а координаты (x2, y2) будут (-Δ/2, y2). Следовательно, формулы упрощаются до:

и
 и
и 
При этом крайнее левое решение, обозначенное позицией 222' на фиг. 2b, является альтернативным решением, которое было бы обнаружено датчиком 208'. После внесения соответствующих изменений рассуждения и формулы также будут верны, когда только датчик 208' обнаруживает два перехода при прохождении слева от центральной точки «C», но тогда необходимо выбрать другое решение, в результате чего:
 и
и 
Таким образом, положение центра круглой захватываемой части в фиксированной системе координат известно. Теперь необходимо переместить базовую ось 204 зажима 202 в правильное положение. Так как в момент обнаружения второго перехода базовая ось находится в точке (0, y2 - d), необходимо выполнить только поступательное перемещение оттуда в точку (x0, y0) или окончательное поступательное перемещение в точку (x0, y0 - y2 + d).
Следует отметить, что в этой процедуре общая ширина W сканирования равна Δ + 2R при условии, что Δ меньше R.
На фиг. 3а и 3b проиллюстрирован второй режим работы, в котором диаметр круглой захватываемой части первоначально неизвестен. Способ проиллюстрирован с помощью трех датчиков (N = 3), хотя он одинаково хорошо работает с двумя датчиками. Ось X фиксированной системы координат проходит вдоль линии датчиков. Ноль оси X находится на перпендикуляре, проходящем через базовую ось 304. Таким образом, базовая ось расположена в точке (0, -d). Ось Y параллельна направлению  перемещения, и обнуляется в начале сканирования.
перемещения, и обнуляется в начале сканирования.
При сканировании может возникнуть ситуация, в которой переход сначала замечает датчик 308', тем самым регистрируя точку (x1, y1), затем датчик 308, который регистрирует точку (x2, y2), и, наконец, датчик 308'', который регистрирует точку (x3, y3). Как только три перехода были обнаружены, положение центра «C» (x0, y0) круглой захватываемой части рассчитывается по следующим формулам:
 ,
, 
 ,
, 
 ,
, 


В этом случае существует только одно возможное решение для «C».
В качестве альтернативы может возникнуть ситуация, изображенная на фиг. 3b. В данном случае первый переход обнаруживается датчиком 308'', и тем самым определяется первая точка (x1, y1). После этого датчик 308' обнаруживает два перехода в точках (x2, y2) и (x3, y3). Как только эти три точки станут известны, положение центральной точки «C» с координатами (x0, y0) можно рассчитать по тем же формулам, которые приведены выше. В этом случае также существует только одно возможное решение для «C»
В тот момент, когда были обнаружены три перехода, базовая ось 304 находится в положении (0, y3 - d). Захват должен перемещаться только по вектору (x0, y0 - y3 + d), чтобы позиционировать базовую ось 304 на одной линии с центральной точкой «C». После позиционирования стержень захватного устройства может быть введен в посадочное отверстие посредством поступательного перемещения вдоль базовой оси.
Поскольку теперь известна центральная точка «C» круглой захватываемой части, радиус и диаметр D можно легко рассчитать как расстояние между любой из зарегистрированных точек и точкой «C». Результат можно сравнить с диаметром круглой захватываемой части, полученной от глобального устройства управления, для проверки наличия подходящей катушки.
Если при достижении ограниченной длины перемещения не было обнаружено ни одного, или было обнаружено только два перехода, процедура повторяется после повторного позиционирования захватного устройства в исходное положение и его смещения в направлении от датчиков, которые не обнаружили никакого перехода, на длину, которая равна N × Δ. Разумная длина предела перемещения достигается тогда, когда после первого обнаружения перехода сканирование продолжается на длину, равную диаметру круглой захватываемой части. Если этот диаметр неизвестен, то в качестве предела можно использовать максимальный диаметр из всех круглых захватываемых частей, используемых на производстве.
На фиг. 4 показан фактический вариант выполнения захватного устройства 400 со всеми различными компонентами: управляемый зажим 402 показан с базовой осью 404. Зажим имеет клешневые захваты 420, которые входят во внутреннюю канавку в посадочном отверстии катушки. Клешневые захваты 420 могут быть отведены для освобождения катушки по команде. Два показанных лазерных детектора 408 и 408' присутствия-отсутствия во время перемещения захвата перемещаются перед зажимом 402.
На фиг. 5 показано выравнивание зажима 500 с катушкой 520, когда базовая ось находится на одной линии с осью катушки перед захватыванием катушки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА И СПОСОБ ОБРАЗОВАНИЯ УЗЛА БОРТ-НАПОЛНИТЕЛЯ ДЛЯ ШИН | 2013 |
|
RU2625976C2 |
| СПОСОБ И УСТРОЙСТВО МАНИПУЛИРОВАНИЯ ШИНАМИ | 2016 |
|
RU2735514C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАЧИ КАТУШЕК В МАШИНУ | 2002 |
|
RU2296096C2 |
| СИСТЕМА И СПОСОБ ПОЛУЧЕНИЯ ОПТИЧЕСКОГО ВОЛОКНА | 2018 |
|
RU2773163C2 |
| СИСТЕМЫ И СПОСОБЫ ЭКСТРУЗИОННОГО ПРЕССОВАНИЯ | 2013 |
|
RU2669736C2 |
| УСТРОЙСТВО ХРАНЕНИЯ СРЕДСТВА ОБРАЩЕНИЯ | 2012 |
|
RU2538543C1 |
| УСТРОЙСТВО ОБВЯЗЫВАНИЯ БУМАЖНЫХ ЛИСТОВ | 2014 |
|
RU2641728C2 |
| Захватное устройство | 1983 |
|
SU1220788A1 |
| Базовая станция, роботизированная система чистки и способ ее управления | 2020 |
|
RU2785339C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТОПЛИВНЫХ ЭЛЕМЕНТОВ, СООТВЕТСТВУЮЩИЕ ЗАЖИМ И ПОГРУЗОЧНО-РАЗГРУЗОЧНАЯ СИСТЕМА | 2009 |
|
RU2488902C2 |
Группа изобретений относится к области оборудования для обнаружения, зажима и освобождения катушек, имеющих круглую захватываемую часть, такую как фланец или посадочное отверстие, а также к области использования соответствующего захватного устройства. Захватное устройство содержит управляемый зажим для зажима и освобождения захватываемой части катушки, выполненный с размером, соответствующим диаметру круглой захватываемой части катушки, и сканирующую систему для определения положения оси катушки, которая имеет два или более датчиков, выполненных с возможностью определения присутствия катушки в направлении, параллельном базовой оси зажима, при этом все датчики расположены вдоль одной прямой линии на равном расстоянии друг от друга, а расстояние между любыми двумя соседними датчиками меньше размера зажима. Представлены также соответствующие способы обнаружения и зажима катушек. Использование изобретений позволяет уменьшить время и повысить надежность поиска захватываемой части катушки. 3 н. и 13 з.п. ф-лы, 5 ил.
1. Захватное устройство для катушки с круглой захватываемой частью, выполненное с возможностью обнаружения, зажима и освобождения упомянутой катушки и содержащее
(a) управляемый зажим для зажима и освобождения упомянутой захватываемой части по требованию, при этом упомянутый зажим выполнен с размером, соответствующим диаметру круглой захватываемой части катушки и с возможностью совпадения расположения его базовой оси с осью катушки при зажиме,
(b) сканирующую систему для определения положения оси катушки,
отличающееся тем, что
упомянутая сканирующая система имеет два или более датчиков, выполненных с возможностью определения присутствия катушки в направлении, параллельном упомянутой базовой оси зажима, при этом все датчики расположены вдоль одной прямой линии на равном расстоянии друг от друга, причем расстояние между любыми двумя соседними датчиками меньше упомянутого размера зажима, а упомянутая базовая ось определяет перпендикулярную к ней координатную плоскость, включающую в себя линию упомянутых датчиков.
2. Захватное устройство по п. 1, в котором расстояние между любыми двумя соседними датчиками составляет от одной четверти до трех четвертей от размера зажима.
3. Захватное устройство по п. 1 или 2, в котором упомянутая базовая ось зажима расположена на серединном перпендикуляре, проходящем между двумя соседними датчиками, которые расположены ближе всего к базовой оси.
4. Захватное устройство по п. 1 или 2, в котором упомянутая базовая ось зажима расположена на перпендикуляре к упомянутой линии, проходящем через один из датчиков, расположенных в середине.
5. Захватное устройство по любому из пп. 1-4, в котором в координатной плоскости перпендикулярное расстояние между упомянутой базовой осью зажима и упомянутой линией датчиков меньше упомянутого размера зажима.
6. Захватное устройство по п. 5, в котором в координатной плоскости перпендикулярное расстояние между упомянутой базовой осью зажима и упомянутой линией датчиков составляет более половины упомянутого размера зажима.
7. Захватное устройство по любому из пп. 1-6, в котором упомянутый зажим выполнен в виде стержня с возможностью вставления и удерживания в посадочном отверстии катушки, если захватываемая часть катушки выполнена в виде посадочного отверстия, при этом упомянутый размер зажима соответствует диаметру упомянутого стержня.
8. Захватное устройство по любому из пп. 1-6, в котором упомянутый зажим выполнен в виде фланцевого зажима с возможностью зажатия и удержания фланца катушки, если захватываемая часть катушки выполнена в виде фланца катушки, при этом упомянутый размер зажима соответствует диаметру упомянутого фланца.
9. Способ захвата катушки с круглой захватываемой частью, включающий использование захватного устройства по любому из пп. 1-8, которое снабжают локальным устройством управления для управления его перемещением, при этом
(а) позиционируют захватное устройство вблизи катушки таким образом, чтобы базовая ось зажима была параллельна оси подлежащей захвату катушки,
(b) вводят значение диаметра круглой захватываемой части в упомянутое локальное устройство управления из глобального устройства управления,
(c) перемещают захватное устройство в упомянутой координатной плоскости так, чтобы упомянутые два или более датчиков находились перед упомянутой базовой осью зажима и регистрируют при этом пройденное расстояние в пределах ограниченной длины перемещения,
(d) обнаруживают с помощью одного из датчиков первую точку границы круглой захватываемой части катушки и регистрируют пройденное захватным устройством расстояние при его перемещении до момента этого обнаружения,
(d') обнаруживают с помощью одного из датчиков вторую точку границы круглой захватываемой части катушки и регистрируют пройденное захватным устройством расстояние при его перемещении до момента этого обнаружения,
(f) рассчитывают на основании положения упомянутых первой и второй точек и введенного значения диаметра положение центра круглой захватываемой части катушки в упомянутой координатной плоскости,
(g) перемещают захватное устройство с расположением упомянутой базовой оси зажима в упомянутое рассчитанное положение центра,
(h) осуществляют зажатие и удержание катушки за круглую захватываемую часть.
10. Способ по п. 9, в котором датчики на этапах (d) и (d') являются соседними датчиками.
11. Способ по п. 9, в котором датчики на этапах (d) и (d') являются одним и тем же датчиком.
12. Способ захвата катушки с круглой захватываемой частью, включающий использование захватного устройства по любому из пп. 1-8, которое снабжают локальным устройством управления для управления его перемещением, при этом
(а) позиционируют захватное устройство вблизи катушки таким образом, чтобы упомянутая базовая ось зажима была параллельна оси подлежащей захвату катушки,
(с) перемещают захватное устройство в упомянутой координатной плоскости так, чтобы упомянутые два или более датчиков находились перед упомянутой базовой осью и регистрируют при этом пройденное расстояние в пределах ограниченной длины перемещения,
(d) обнаруживают с помощью одного из датчиков первую точку границы круглой захватываемой части катушки и регистрируют пройденное захватным устройством расстояние при его перемещении до момента этого обнаружения,
(d') обнаруживают с помощью одного из датчиков вторую точку границы круглой захватываемой части катушки и регистрируют пройденное захватным устройством расстояние при его перемещении до момента этого обнаружения,
(d'') обнаруживают с помощью одного из датчиков третью точку границы круглой захватываемой части катушки и регистрируют пройденное захватным устройством расстояние при его перемещении до момента этого обнаружения,
(f') рассчитывают на основании положения упомянутых первой, второй и третьей точек положение центра круглой захватываемой части катушки в упомянутой координатной плоскости,
(g) перемещают захватное устройство с расположением упомянутой базовой оси зажима в упомянутое рассчитанное положение центра,
(h) осуществляют зажатие и удержание катушки за круглую захватываемую часть.
13. Способ по п. 12, в котором либо датчик, используемый на этапе (d), либо датчик, используемый на этапе (d'), является тем же самым датчиком, который используют на этапе (d'').
14. Способ по п. 12 или 13, который после этапа (а) включает
(b) ввод значения диаметра круглой захватываемой части катушки в упомянутое локальное устройство управления из глобального устройства управления,
а после этапа (f') включает этап (f''), на котором вычисляют диаметр круглой захватываемой части и подают сигнал тревоги, если расчетные и введенные значения диаметра отличаются более чем на 5%.
15. Способ по любому из пп. 9-14, в котором, если этап (с) заканчивается на ограниченной длине перемещения, то захватное устройство заново позиционируют в исходное положение и смещают вдоль упомянутой линии датчиков на расстояние сдвига, равное расстоянию между соседними датчиками, умноженному на количество датчиков, и этап (с) повторяют.
16. Способ по любому из пп. 9-15, в котором упомянутую ограниченную длину перемещения считают законченной, когда захватное устройство переместили на величину диаметра круглой захватываемой части катушки после обнаружения первой точки границы захватываемой части.
| EP 1900665 A1, 19.03.2008 | |||
| Захват для съема шпуль со шпинделя веретена текстильной машины | 1987 |
|
SU1449501A1 |
| РОБОТ ДЛЯ НЕБЛАГОПРИЯТНЫХ УСЛОВИЙ ВНЕШНЕЙ СРЕДЫ | 2009 |
|
RU2525008C2 |
| Сплав для зубных протезов | 1932 |
|
SU29594A1 |
| US 4723884 A, 09.02.1988 | |||
| Способ получения производных фталазона или их солей | 1972 |
|
SU577986A3 |

