Изобретение относится к радиолокационной технике для определения местоположения объектов с использованием радиолокационных систем и может быть использовано для предупреждения столкновений летательного аппарата (ЛА) с воздушными препятствиями, находящимися в интервале высот выделенного в соответствии с нормами эшелонирования. Препятствиями могут быть самолеты, вертолеты, воздушные шары и др. ЛА (в том числе беспилотные), а также вихревые следы, вышки, опоры линий электропередач и т.п. По статистике, столкновение ЛА чаще всего происходит не на встречных курсах "лоб в лоб", а при изменении эшелонов и коридоров. В настоящее время интенсивность воздушного движения возрастает с 5% до 10% в год. В связи с увеличением количества ЛА уменьшаются интервалы высот между эшелонами (в вертикальной плоскости). Ситуация в Европе настолько сложна, что прогнозируемое удвоение объема воздушного движения при сокращении минимума вертикального эшелонирования приводит к потокам ЛА, стоящих в очереди в ожидании разрешения на взлет.
Поэтому задача автономного обнаружения объектов в различных метеоусловиях в допустимом интервале высот между эшелонами приобретает первостепенное значение.
Известные способы и устройства определения опасного сближения для предупреждения столкновений в вертикальной плоскости основаны на измерении высоты полета конфликтующих воздушных объектов, например самолетов, и последующем обмене данными о высоте полета каждого объекта. Все известные способы не являются автономными, так как зависят от измеренной высоты каждого воздушного объекта, который представляет опасность. Отсутствие данных о высоте полета любого из конфликтующих объектов приводит к невозможности решения задачи предупреждения столкновений с ним в вертикальной плоскости в пределах выделенного интервала высот полета.
Известны системы предупреждения столкновений, например "Эшелон" (см. Т.Г.Анодина и др. Автоматизация управления воздушным движением. М.: Транспорт, 1992, с.145-147), которая предназначена для выявления угрозы столкновения и определения взаимнокоординированных маневров ЛА, необходимых для предотвращения столкновений в вертикальной плоскости. Система "Эшелон" связана с ответчиком системы вторичной радиолокации и самолетным переговорным устройством, а также использует данные о высоте. От высотомеров системы воздушных сигналов в аппаратуру системы "Эшелон" поступает информация о высоте полета. Через ответчики системы вторичной радиолокации передают в наземные пункты управления воздушным движением сообщения об обнаруженной конфликтной ситуации, после обработки которых на запрашивающий ЛА передается команда, рекомендующая маневр. Эта система требует установки соответствующей аппаратуры на ЛА и наличия ответчиков на встречных ЛА.
В настоящее время на практике в тяжелой и средней (по тоннажу) авиации широко используется международная «Система предупреждения столкновений в воздухе "TCAS"», которой пользуется почти вся мировая авиация для предупреждения столкновений в воздухе. Эта система имеет большую стоимость, значительные массогабаритные характеристики и также требует оборудования всех самолетов высотомерами и активными ответчиками.
В качестве прототипа выбираем известную "Радиолокационную систему предупреждения столкновений ЛА с препятствиями" (Заявитель Московский государственный авиационный институт; Авторы Войнич Б.А. и др., патент RU №2150752, МПК G08G 5/04, G01S 13/93) как наиболее близкую по назначению и технической сущности.
В числе основных недостатков известного радиолокационного способа и устройства предупреждения столкновений ЛА с препятствиями, выбранных за прототип, следует отметить следующие:
1) отсутствует возможность контроля заданного интервала высоты между эшелонами. Известная система позволяет обнаруживать и измерять дальность до препятствия, например до объекта, попавшего в диаграмму направленности антенны, но не позволяет определить, находится этот объект на опасной для столкновения высоте или на безопасной, когда не требуется выполнять маневр по предупреждению столкновения. Если объект движется в разрешенном для него интервале высоты, то нет необходимости изменять параметры движения ЛА. Следует учитывать, что развитие воздушного движения, рост интенсивности перевозок и увеличение плотности ЛА в воздушном пространстве требуют устранения лишних маневров ЛА, когда опасная ситуация не обоснована;
2) наличие угловых колебаний ЛА относительно центра масс, изменения угла атаки при полете ЛА требует коррекции пространственного положения диаграмм направленности многочисленных антенн (ФАР), размещаемых заподлицо. Такая коррекция (стабилизация диаграммы направленности антенны) в вертикальной плоскости не предусмотрена, что затрудняет или делает невозможным обнаружение объектов.
Целью предлагаемого технического решения (способа и устройства для его осуществления) является повышение безопасности полета путем обеспечения автономного контроля полета и предупреждения столкновения с объектами в вертикальной плоскости в выделенном (допустимом) интервале высот полета между эшелонами.
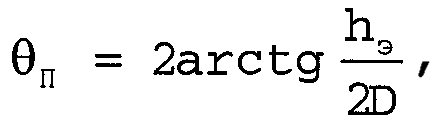
1. Радиолокационный способ предупреждения столкновений ЛА с препятствиями в вертикальной плоскости, в котором при обзоре воздушного пространства в горизонтальной плоскости осуществляется обнаружение, выбор и измерение дальности до выбранного воздушного объекта, представляющего опасность полету ЛА, отличающийся тем, что по измеренному значению дальности D и заданному значению сигнала, соответствующего высотному интервалу между эшелонами, hэ определяют значение сигнала, формирующего ширину зоны перекрытия диаграммы направленности антенны (ДНА) в вертикальной плоскости (θП) по известному тригонометрическому соотношению в соответствии с выражением:
 ,
,
вычисляют значение сигнала, соответствующего диапазону углов наклона ДНА Δα, в пределах которых обеспечивается зона перекрытия, из соотношения:
 ,
,
где θВ - ширина диаграммы направленности антенны в вертикальной плоскости;
при сканировании антенны в вертикальной плоскости относительно стабилизированного положения в горизонтальной плоскости определяют сигнал дальности опасного сближения ЛА, местоположение опасного объекта в вертикальной плоскости относительно заданного высотного интервала между эшелонами в зоне перекрытия, по которому формируют сигналы в виде меток ВЕРХ или НИЗ при нахождении опасного объекта выше или ниже заданного высотного интервала в зоне перекрытия, а при нахождении опасного объекта в зоне перекрытия одновременно формируют сигналы меток ВЕРХ и НИЗ и при достижении опасным объектом дальности опасного сближения формируют сигнал предупреждения столкновения с опасным объектом.
2. Бортовая радиолокационная система, осуществляющая способ по п.1, содержащая антенну, соединенную с приемопередатчиком, выход которого соединен с одним из входов индикатора, отличающаяся тем, что в нее дополнительно введены механически связанное с антенной устройство наклона и угловой стабилизации, обеспечивающее качание ДНА в вертикальной плоскости относительно горизонтальной плоскости из верхнего положения в нижнее и обратно в диапазоне углов наклона антенны, обеспечивающих необходимую зону перекрытия, последовательно соединенные радиодальномер, вычислитель зоны перекрытия ДНА и вычислитель угла наклона антенны, выход которого соединен с устройством наклона и угловой стабилизации, на другой вход которого поступает сигнал с датчика гиростабилизации по наклону, а также анализатор положения объекта, соединенный с формирователем меток положения объекта, формирователь координат перекрестия, соединенный с соответствующими выходами устройства управления перекрестием, управляемым оператором, и формирователь метки дальности опасного сближения, соединенный с вычислителем дальности опасного сближения, использующим информацию о типе самолета, его скорости и времени реакции летчика, при этом выход приемопередатчика соединен со входом анализатора положения объекта и с одним из входов радиодальномера, другой вход которого соединен с одним из выходов формирователя координат перекрестия, подключенным также к второму входу смесителя сигналов меток, третий вход которого соединен с другим выходом формирователя координат перекрестия, четвертый вход смесителя сигналов меток соединен с выходом формирователя метки дальности опасного сближения, а пятый вход соединен с выходом формирователя меток положения объекта, выход смесителя сигналов меток соединен со вторым входом индикатора, выход радиодальномера соединен с другими входами формирователя меток положения объекта и анализатора положения объекта, третий вход которого соединен с выходом вычислителя угла наклона антенны.
Введение указанных признаков в способ и в устройство для его осуществления обеспечивает возможность автономно контролировать опасное сближение ЛА с воздушными объектами в вертикальной плоскости, вовремя совершать маневр, предотвращая столкновение. Таким образом, предложенное техническое решение повышает безопасность полетов.
Из известного уровня техники не выявлены решения, имеющие признаки, совпадающие с отличительными признаками предлагаемых технических решений. Поэтому можно считать, что предложенные технические решения соответствуют условию изобретательского уровня.
Сущность изобретения поясняется чертежами, где представлены
на фиг.1 - положения диаграммы направленности антенны в вертикальной плоскости, обеспечивающие зону перекрытия и расположение объекта относительно нее;
на фиг.2 - углы наклона антенны, обеспечивающие зону перекрытия;
на фиг.3 - структурная схема предлагаемой радиолокационной системы;
на фиг.4 - структурные схемы устройства управления перекрестием и формирователя координат перекрестия;
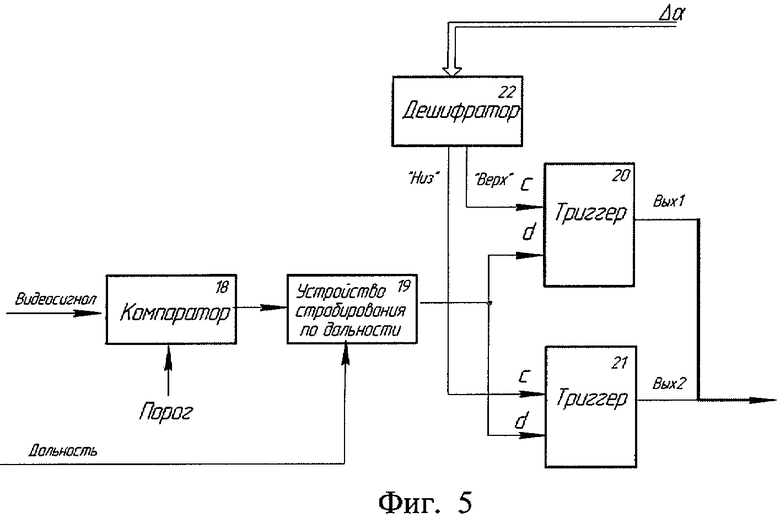
на фиг.5 - структурная схема анализатора положения объекта;
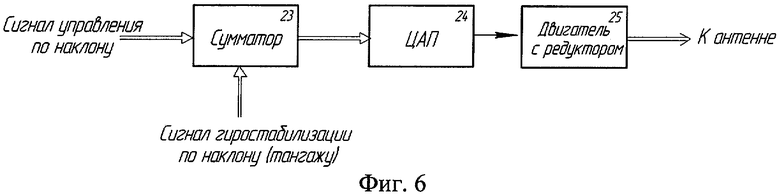
на фиг.6 - структурная схема устройства наклона и угловой стабилизации.
Предлагаемый способ характеризуется тем, что при радиолокационном обзоре воздушного пространства с борта ЛА в горизонтальной плоскости осуществляется обнаружение, выбор и измерение дальности до выбранного воздушного объекта, представляющего опасность для полета.
В отличии от прототипа в предлагаемом способе по измеренному значению дальности D и заданному значению сигнала, соответствующего высотному интервалу между эшелонами hэ, определяют значение сигнала, формирующего ширину зоны перекрытия θП ДНА, сканирующей в вертикальной плоскости относительно стабилизированного положения в горизонтальной плоскости, в соответствии с выражением, полученным из известных тригонометрических соотношений (фиг.1):

Вычисляют значение сигнала, соответствующего диапазону углов наклона ДНА Δα (фиг.2), в пределах которых обеспечивается зона перекрытия, из соотношения:
 ;
;
где θв - ширина ДНА в вертикальной плоскости.
При сканировании ДН антенны в вертикальной плоскости относительно стабилизированного положения в горизонтальной плоскости определяют сигнал дальности опасного сближения ЛА, а также местоположение опасного объекта в вертикальной плоскости относительно заданного высотного интервала между эшелонами в зоне перекрытия ДНА, по которому формируют сигналы в виде меток ВЕРХ или НИЗ при нахождении опасного объекта соответственно выше или ниже заданного высотного интервала между эшелонами, определяющего зону перекрытия.
При нахождении опасного объекта в зоне перекрытия ДНА сигналы меток ВЕРХ и НИЗ формируются одновременно. При достижении дальности опасного сближения формируют сигнал предупреждения столкновения с опасным объектом.
Предлагаемая система (фиг.3), реализующая заявленный способ, содержит, как и прототип, антенну 1, соединенную с приемопередатчиком 2, выход которого соединен с одним из входов индикатора 3.
В отличие от прототипа в нее введены механически связанное с антенной 1 устройство наклона и угловой стабилизации 4, последовательно соединенные радиодальномер 5, вычислитель зоны перекрытия ДНА 6 и вычислитель угла наклона антенны 7, выход которого соединен с устройством наклона и угловой стабилизации 4, на другой вход которого поступает сигнал с датчика гиростабилизации по наклону, а также анализатор положения объекта 8, соединенный с формирователем меток положения объекта 9, формирователь координат перекрестия 10, соединенный с соответствующими выходами устройства управления перекрестием 11, управляемым оператором, и формирователь метки дальности опасного сближения 12, соединенный с вычислителем дальности опасного сближения 13. Выход приемопередатчика 2 соединен со входом анализатора положения объекта 8 и с одним из входов радиодальномера 5, другой вход которого соединен с одним из выходов формирователя координат перекрестия 10, подключенным также ко второму входу смесителя сигналов меток 14, выход которого соединен со вторым входом индикатора 3. Третий вход смесителя 14 соединен с другим выходом формирователя координат перекрестия 10, четвертый вход соединен с выходом формирователя метки дальности опасного сближения 12, а пятый вход соединен с выходом формирователя меток положения объекта 9. Выход смесителя 14 соединен со вторым входом индикатора 3. Выход радиодальномера 5 соединен с другими входами формирователя меток положения объекта 9 и анализатора положения объекта 8. Третий вход анализатора положения объекта 8 соединен с выходом вычислителя угла наклона антенны 7.
Устройство управления перекрестием 11 (фиг.4) может содержать, например, тактовый генератор 15, выполненный на микросхеме типа 1533ЛАЗ, соединенный с четырьмя кнопками типа КМ1-1.
При ручном нажатии соответствующих кнопок тактовые импульсы поступают на соответствующие входы формирователя координат перекрестия 10.
Формирователь координат перекрестия 10 (фиг.4) содержит, например, два двоичных реверсивных счетчика 16, 17 типа 1533ИЕ7, один из которых формирует код азимута, а другой - код дальности.
Анализатор положения объекта 8 (фиг.5) может быть выполнен на компараторе 18 типа 521САЗ, соединенном через устройство стробирования по дальности 19 на микросхеме 1533ЛАЗ с первыми (информационными) входами двух триггеров 20, 21 на микросхеме типа 1533ТМ2, на вторые входы которых (входы синхронизации) поступают соответствующие сигналы с выходов дешифратора 22, выполненного на микросхемах 1533ЛА2 и 1533ЛН1.
Устройство наклона и угловой стабилизации 4 (фиг.6) выполнено по известной схеме и может, например, состоять из последовательно соединенных сумматора 23, выполненного на микросхеме 533ИМЗ, цифроаналогового преобразователя (ЦАП) 24, который может быть выполнен на микросхеме 1108ПА1А, и двигателя с редуктором 25, который механически связан с антенной 1. Сигнал управления по наклону, поступающий с выхода вычислителя угла наклона антенны 7, с помощью сумматора 23 складывается с сигналом тангажа, поступающим от датчика гиростабилизации по наклону, например от гировертикали. С выхода сумматора 23 сигнал поступает на ЦАП 24, который преобразует код угла наклона антенны в аналоговый сигнал управления двигателем 25. Двигатель 25 через редуктор механически связан с антенной 1.
Работа предлагаемой системы, осуществляющей способ, выполняется следующим образом. При работе бортовой радиолокационной системы в координатах азимут - дальность антенна 1, стабилизированная в пространстве, осуществляет сканирование воздушного пространства в горизонтальной плоскости. На экране индикатора 3 появляются радиолокационные отметки от воздушных объектов, среди которых могут быть объекты, представляющие опасность столкновения при полете ЛА. Оператор (летчик) совмещает отметку "Перекрестие", формируемую на экране индикатора 3 формирователем координат перекрестия 10, с отметкой от выбранного им опасного объекта, управляя вручную, например нажатием соответствующих кнопок ("Вверх", "Вниз", "Влево", "Вправо"), находящихся в устройстве управления перекрестием 11 (фиг.4). При нажатии любой кнопки вырабатываемые тактовым генератором 15 импульсы поступают на соответствующие входы реверсивных счетчиков 16, 17, увеличивая или уменьшая сигнал в виде кода на его выходах (код дальности, код азимута), что приводит к перемещению перекрестия по экрану индикатора.
Код дальности с выхода формирователя координат перекрестия 10 поступает на вход радиодальномера 5, а на другой его вход поступает отраженный сигнал с выхода приемопередатчика 2. В радиодальномере 5 измеряется дальность до выбранного опасного объекта и его автоматическое сопровождение по дальности. При этом информация о текущей дальности D с выхода радиодальномера 5 поступает на вычислитель зоны перекрытия ДНА 6, анализатор положения объекта 8 и формирователь меток положения объекта 9.
В вычислителе зоны перекрытия ДНА 6 определяется значение сигнала, формирующего зону перекрытия ДНА в вертикальной плоскости, используя сигнал дальности до объекта D и заданное значение сигнала, соответствующее высотному интервалу между эшелонами hэ, по известным тригонометрическим соотношениям (фиг.1) в соответствии с выражением:
 ;
;
где θП - ширина зоны перекрытия ДНА;
hэ - значение интервала высот между эшелонами;
D - дальность до объекта.
С выхода вычислителя зоны перекрытия ДНА 6 сигнал, соответствующий ширине зоны перекрытия ДНА θП, поступает на вычислитель угла наклона антенны 7, в котором вычисляют значение сигнала, пропорционального диапазону углов наклона антенны Δα вверх и вниз, в пределах которых обеспечивается необходимая зона перекрытия (фиг.2).
 ;
;
где Δα - диапазон углов наклона антенны;
θB - ширина ДНА в вертикальной плоскости.
Устройство наклона и угловой стабилизации ДНА 4 обеспечивает качание ДНА в вертикальной плоскости относительно стабилизированной горизонтальной плоскости из верхнего положения в нижнее и обратно в диапазоне углов наклона антенны Δα, обеспечивающих необходимую зону перекрытия. При этом стабилизация антенны по тангажу осуществляется суммированием сигнала управления по наклону с выхода вычислителя угла наклона антенны 7 с сигналом угла тангажа, поступающего от датчика гиростабилизации по наклону.
Анализатор положения объекта 8 (фиг.5), анализируя поступающий на него видеосигнал с выхода приемопередатчика 2, определяет наличие или отсутствие отраженного от объекта сигнала в верхнем и нижнем положении ДНА в переделах диапазона углов наклона Δα. Отраженный видеосигнал с выхода приемопередатчика 2 поступает на компаратор 18, который преобразует амплитуду отраженного сигнала в логический уровень и с помощью регулируемого порога убирает шумы. С выхода компаратора 18 сигнал поступает на устройство стробирования по дальности 19, которое пропускает на выход только тот сигнал, который находится на соответствующей дальности. С выхода устройства стробирования по дальности 19 сигнал поступает на информационные входы d двух D-триггеров 20, 21, на входы синхронизации (записи) которых подаются сигналы с выхода дешифратора 22. На вход дешифратора 22 подается сигнал управления по наклону в виде кода с выхода вычислителя угла наклона антенны 7. Когда код угла наклона антенны на входе дешифратора 22 соответствует верхнему положению ДНА, на выходе ВЕРХ дешифратора 22 появится сигнал, под воздействием которого в триггер 20 запишется сигнал с выхода устройства стробирования по дальности 19. В нижнем положении ДНА на выходе НИЗ дешифратора 22 появится сигнал, под воздействием которого в триггер 21 запишется сигнал с выхода устройства стробирования по дальности 19. Таким образом, на выходах триггеров 20, 21 анализатора положения объекта 8 формируется сигнал в виде двухразрядного кода положения объекта, определяющий положение объекта относительно зоны перекрытия ДНА: если объект находится выше зоны перекрытия - код 1,0; если объект находится ниже зоны перекрытия - код 0,1; если объект находится в зоне перекрытия - код 1,1. Этот код поступает на формирователь меток положения объекта 9, на который также поступает информация о дальности D с выхода радиодальномера 5. В формирователе меток положения объекта 9 формируются одна или две метки, например, распложенные сверху и снизу относительно РЛ отметки от объекта.
Если объект находится выше зоны перекрытия (фиг.1) (ДНА в верхнем положении - отраженный сигнал есть, ДНА в нижнем положении - отраженного сигнала нет), метка ВЕРХ располагается сверху РЛ отметки от объекта на индикаторе 3.
Если объект находится ниже зоны перекрытия (ДНА в верхнем положении - отраженного сигнала нет, ДНА в нижнем положении - отраженный сигнал есть), метка НИЗ располагается снизу РЛ отметки от объекта.
Если объект находится в зоне перекрытия (ДНА в верхнем и нижнем положении - отраженный сигнал есть), метка ВЕРХ располагается сверху, а метка НИЗ - снизу РЛ отметки от объекта, что означает возможную опасность столкновения.
Минимально допустимая дальность, на которой летчик должен принять решение о наличии опасного сближения и принятии мер для изменения высоты полета или курса с целью ухода от возможного столкновения, определяется сигналом дальности опасного сближения, который вырабатывается вычислителем дальности опасного сближения 13, использующим информацию о типе самолета, его скорости V и времени реакции летчика Т. Сигнал дальности опасного сближения с выхода вычислителя дальности опасного сближения 13 поступает на формирователь метки дальности опасного сближения 12, который формирует на экране индикатора 3 по координате дальности метку дальности опасного сближения, представляющую собой горизонтальную линию. Когда на индикаторе 3 отметка от объекта совпадает с меткой дальности опасного сближения и если на этой дальности наблюдаются метки ВЕРХ и НИЗ одновременно, то дальнейшее сближение считают опасным и необходимо принять меры для предупреждения столкновения.
Все метки, вырабатываемые предлагаемой системой, подаются на смеситель сигналов меток 14, где смешиваются и поступают на один из входов индикатора 3.
Реализация автономного устройства предупреждения столкновений позволяет повысить безопасность полета самолета за счет контроля возможного столкновения с объектами в заданном интервале высот между эшелонами, особенно при сокращении минимума вертикального эшелонирования, что имеет место в настоящее время при увеличении объема воздушного движения. При этом используется режим работы штатного бортового радиолокатора (с небольшой доработкой) вместо используемых в настоящее время систем типа TCAS, являющихся неавтономными системами, (требующими информацию о высоте объектов, представляющих опасность столкновения) и обладающих большими массой и габаритами, что не позволяет размещать их на малых самолетах.
Изобретение может быть использовано для предупреждения столкновений ЛА с воздушными препятствиями, находящимися в интервале высот выделенного в соответствии с нормами эшелонирования. Достигаемый технический результат - повышение безопасности полета путем обеспечения автономного контроля полета и предупреждения столкновения с объектами в вертикальной плоскости в выделенном интервале высот полета между эшелонами. Указанный результат достигается за счет того, что определяют значение сигнала, формирующего ширину зоны перекрытия диаграммы направленности антенны (ДНА) в вертикальной плоскости, вычисляют значение сигнала, определяющего диапазон углов перемещения ДНА вверх и вниз. При сканировании антенны в вертикальной плоскости относительно стабилизированного положения в горизонтальной плоскости определяют сигнал дальности опасного сближения ЛА, местоположение объекта в вертикальной плоскости относительно заданного высотного интервала между эшелонами в зоне перекрытия, относительно которого формируют сигналы в виде меток ВЕРХ или НИЗ при нахождении опасного объекта выше или ниже заданного высотного интервала в зоне перекрытия. При нахождении опасного объекта в зоне перекрытия сигналы меток ВЕРХ, НИЗ формируются одновременно и при достижении опасным объектом дальности опасного сближения формируют сигнал предупреждения столкновения с ним. 2 н.п. ф-лы, 6 ил.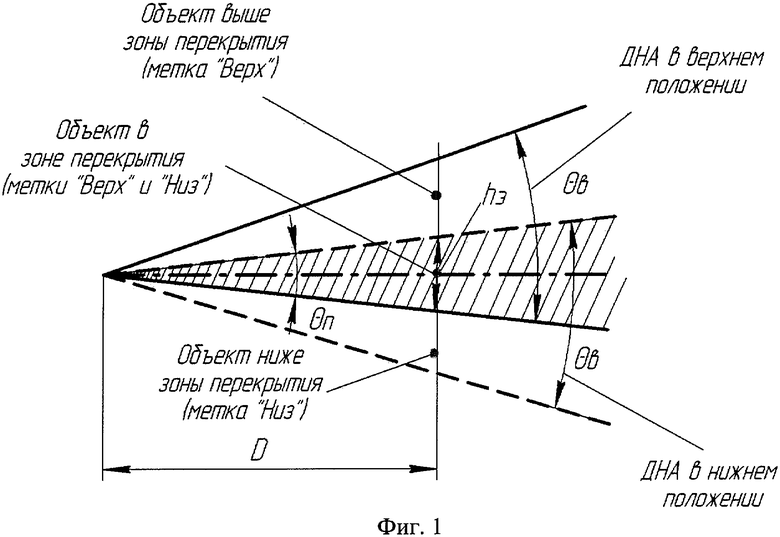
1. Радиолокационный способ предупреждения столкновений летательного аппарата с препятствиями в вертикальной плоскости, в котором при обзоре воздушного пространства в горизонтальной плоскости осуществляется обнаружение, выбор и измерение дальности до выбранного воздушного объекта, представляющего опасность полету летательного аппарата, отличающийся тем, что по измеренному значению дальности D и заданному значению сигнала, соответствующего высотному интервалу между эшелонами hэ, определяют значение сигнала, формирующего ширину зоны перекрытия диаграммы направленности антенны в вертикальной плоскости (θП) по известному тригонометрическому соотношению в соответствии с выражением
вычисляют значение сигнала, соответствующего диапазону углов наклона диаграммы направленности антенны Δα, в пределах которых обеспечивается зона перекрытия, из соотношения
где θB - ширина диаграммы направленности антенны в вертикальной плоскости;
при сканировании антенны в вертикальной плоскости относительно стабилизированного положения в горизонтальной плоскости определяют сигнал дальности опасного сближения летательного аппарата, местоположение опасного объекта в вертикальной плоскости относительно заданного высотного интервала между эшелонами в зоне перекрытия, по которому формируют сигналы в виде меток ВЕРХ или НИЗ при нахождении опасного объекта выше или ниже заданного высотного интервала в зоне перекрытия, а при нахождении опасного объекта в зоне перекрытия одновременно формируют сигналы меток ВЕРХ и НИЗ, и при достижении опасным объектом дальности опасного сближения формируют сигнал предупреждения столкновения с опасным объектом.
2. Бортовая радиолокационная система, осуществляющая способ по п.1, содержащая антенну, соединенную с приемопередатчиком, выход которого соединен с одним из входов индикатора, отличающаяся тем, что в нее дополнительно введены механически связанное с антенной устройство наклона и угловой стабилизации, обеспечивающее качание диаграммы направленности антенны в вертикальной плоскости относительно горизонтальной плоскости из верхнего положения в нижнее и обратно в диапазоне углов наклона антенны, обеспечивающих необходимую зону перекрытия, последовательно соединенные радиодальномер, вычислитель зоны перекрытия диаграммы направленности антенны и вычислитель угла наклона антенны, выход которого соединен с устройством наклона и угловой стабилизации, на другой вход которого поступает сигнал с датчика гиростабилизации по наклону, а также анализатор положения объекта, соединенный с формирователем меток положения объекта, формирователь координат перекрестия, соединенный с соответствующими выходами устройства управления перекрестием, управляемым оператором, и формирователь метки дальности опасного сближения, соединенный с вычислителем дальности опасного сближения, использующим информацию о типе самолета, его скорости и времени реакции летчика, при этом выход приемопередатчика соединен с входом анализатора положения объекта и с одним из входов радиодальномера, другой вход которого соединен с одним из выходов формирователя координат перекрестия, подключенным также к второму входу смесителя сигналов меток, третий вход которого соединен с другим выходом формирователя координат перекрестия, четвертый вход смесителя сигналов меток соединен с выходом формирователя метки дальности опасного сближения, а пятый вход соединен с выходом формирователя меток положения объекта, выход смесителя сигналов меток соединен со вторым входом индикатора, выход радиодальномера соединен с другими входами формирователя меток положения объекта и анализатора положения объекта, третий вход которого соединен с выходом вычислителя угла наклона антенны.
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ | 1999 |
|
RU2150752C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2007 |
|
RU2326407C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ ПРИ НАВЕДЕНИИ НА ЦЕЛЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2311605C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РАДИОЛОКАТОР | 2006 |
|
RU2315334C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РАДИОЛОКАТОР | 2004 |
|
RU2280264C2 |
| US 5874917 A, 23.02.1999 | |||
| WO 03091967 A1, 06.11.2003 | |||
| WO 03005058 B1, 19.06.2003. | |||

