Изобретение относится к способу управления амортизаторами транспортного средства, к программному продукту для осуществления этапов способа, к вычислительному устройству для исполнения программного продукта и к автотранспортному средству, содержащему вычислительное устройство.
Известны способы управления амортизаторами транспортного средства, например, способ, описанный в документе ЕР2487057А1, в котором электрический ток, питающий электроклапан, или магнитное поле внутри амортизатора позволяет изменять его коэффициент амортизации в зависимости от значения электрического тока.
Как правило, известные способы, применяемые в стратегиях преодоления плохой низкочастотной дороги (MRBF) с адаптацией функции перехода амортизатора на частоту неровностей, обнаруживаемых на дороге. Однако недостатком известных способов является невозможность реагировать удовлетворительным образом на отдельную неровность, в частности, на искусственную дорожную неровность.
Для преодоления недостатков известных технических решений объектом изобретения является способ управления амортизаторами транспортного средства при прохождении искусственной дорожной неровности, содержащий, согласно изобретению, следующие этапы:
- электрический ток управления передним амортизатором устанавливают на первое максимальное значение тока при обнаружении восходящего уклона искусственной дорожной неровности для получения повышенного коэффициента амортизации на передних колесах;
- указанный электрический ток управления передним амортизатором устанавливают на второе значение тока, меньшее указанного первого значения тока, как только после обнаружения восходящего уклона транспортное средство проходит первое расстояние, соответствующее длине восходящего уклона, для получения меньшего коэффициента амортизации на передних колесах.
Предпочтительно способ управления содержит этапы, на которых:
- электрический ток управления задним амортизатором устанавливают на третье максимальное значение тока, как только после обнаружения восходящего уклона транспортное средство проходит второе расстояние, равное колесной базе транспортного средства, для получения повышенного коэффициента амортизации на задних колесах;
- указанный электрический ток управления задним амортизатором устанавливают на четвертое значение тока, меньшее указанного третьего значения тока, как только после обнаружения восходящего уклона транспортное средство проходит третье расстояние, соответствующее сумме длины восходящего уклона и колесной базы, для получения меньшего коэффициента амортизации на задних колесах.
В частности, способ управления содержит этап, на котором:
- указанный электрический ток управления задним амортизатором устанавливают на пятое значение тока, находящееся в пределах между указанным третьим и указанным четвертым значениями тока, после обнаружения восходящего уклона и пока транспортное средство не прошло указанное второе расстояние, равное колесной базе транспортного средства, для подготовки повышения коэффициента амортизации на задних колесах.
Предпочтительно способ управления содержит этапы, на которых:
- указанный электрический ток управления передним амортизатором устанавливают на шестое значение тока, меньшее второго значения тока, при обнаружении нисходящего уклона искусственной дорожной неровности, чтобы уменьшить коэффициент амортизации на передних колесах;
- указанный электрический ток управления передним амортизатором устанавливают на седьмое значение тока, превышающее указанное шестое значение тока, как только после обнаружения нисходящего уклона транспортное средство проходит четвертое расстояние, соответствующее сумме длины нисходящего уклона и длины колесной базы, чтобы опять повысить коэффициент амортизации на передних колесах.
В частности, способ управления содержит этапы, на которых:
- указанный электрический ток управления задним амортизатором устанавливают на восьмое значение тока, находящееся в пределах между указанным третьим значением тока и указанным четвертым значением тока, для получения средне-высокого коэффициента амортизации на задних колесах;
- указанный электрический ток управления задним амортизатором устанавливают на девятое значение тока, находящееся в пределах между указанным вторым значением тока и указанным третьим значением тока, как только после обнаружения нисходящего уклона транспортное средство проходит указанное второе расстояние, равное колесной базе транспортного средства, для получения более высокого коэффициента амортизации на задних колесах.
Предпочтительно способ управления содержит этапы, на которых:
- непрерывно вычисляют разность измерений в реальном времени скоростей колес;
- обнаруживают восходящий уклон после прохождения по меньшей мере одного порога указанной разностью измерений в реальном времени.
В частности, разность равна максимуму скоростей вращения передних колес, из которого вычитают среднее значение скоростей вращения колес транспортного средства.
В частности, восходящий уклон обнаруживают после первого прохождения отрицательного порога, за которым следует второе прохождение положительного порога.
В частности, способ управления содержит этап, на котором:
- обнаруживают нисходящий уклон после прохождения по меньшей мере одного порога указанной разностью измерений в реальном времени после обнаружения восходящего уклона.
Объектом изобретения является также компьютерный программный продукт, содержащий команды для осуществления этапов способа, когда эти команды исполняет процессор.
Объектом изобретения является также вычислительное устройство для управления амортизаторами автотранспортного средства, содержащее электронный интерфейс связи с бортовой сетью, память, в которой записан компьютерный программный продукт, и процессор для исполнения указанной программы таким образом, чтобы генерировать электрические токи управления амортизаторами.
Наконец, объектом изобретения является автотранспортное средство, содержащее бортовую сеть и вычислительное устройство, соединенное с указанной бортовой сетью.
Другие отличительные признаки и преимущества изобретения будут более понятны из нижеследующего описания неограничивающего варианта осуществления со ссылками на прилагаемые чертежи, на которых:
на фиг. 1 показано автотранспортное средство перед въездом на искусственную дорожную неровность;
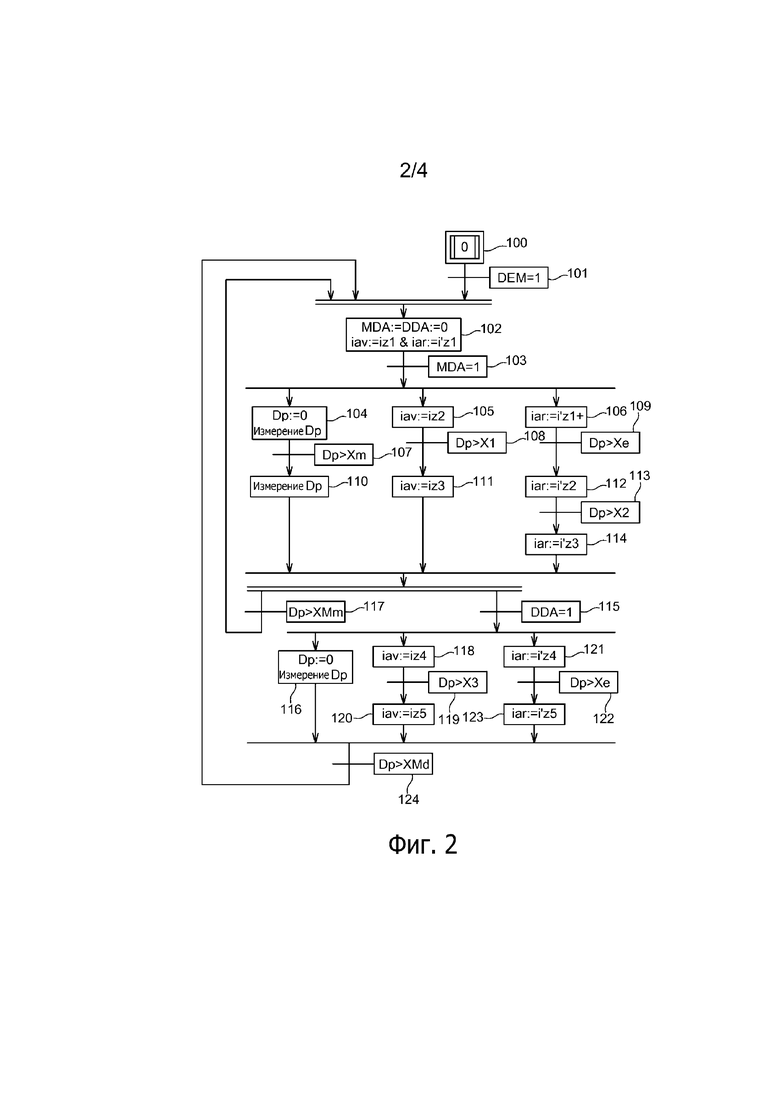
на фиг. 2 представлены этапы заявленного способа;
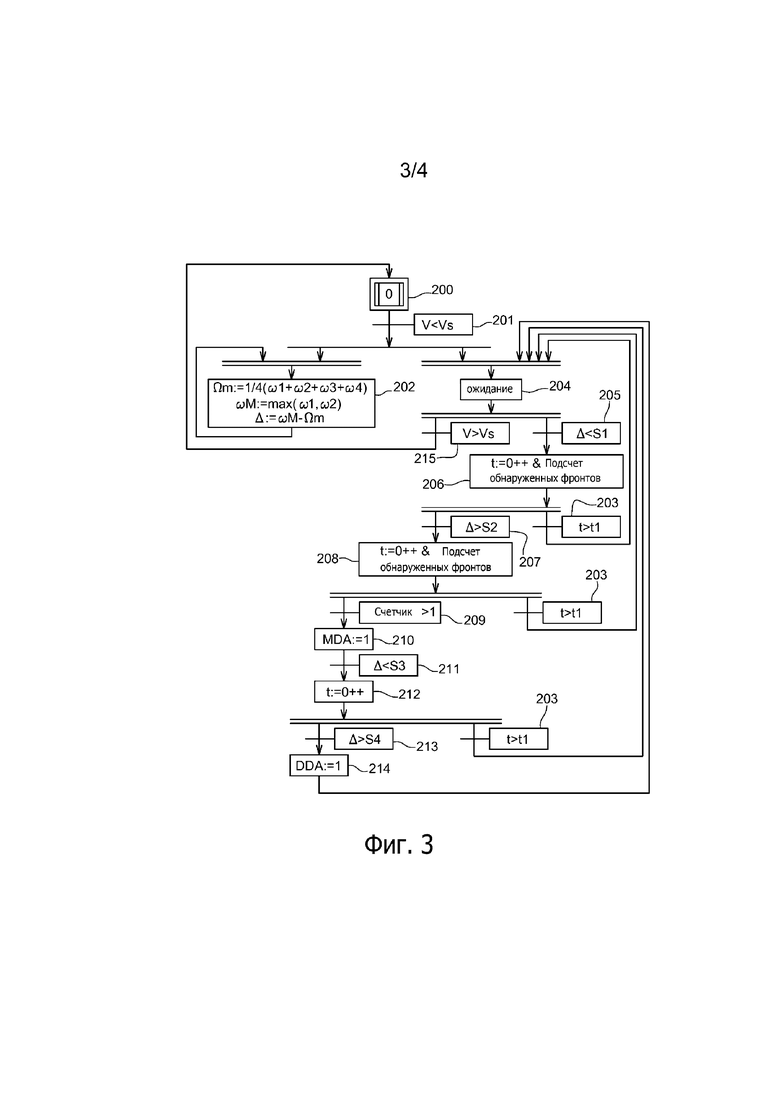
на фиг. 3 показаны этапы способа, дополняющие этапы, представленные на фиг. 2, в предпочтительном варианте осуществления изобретения;
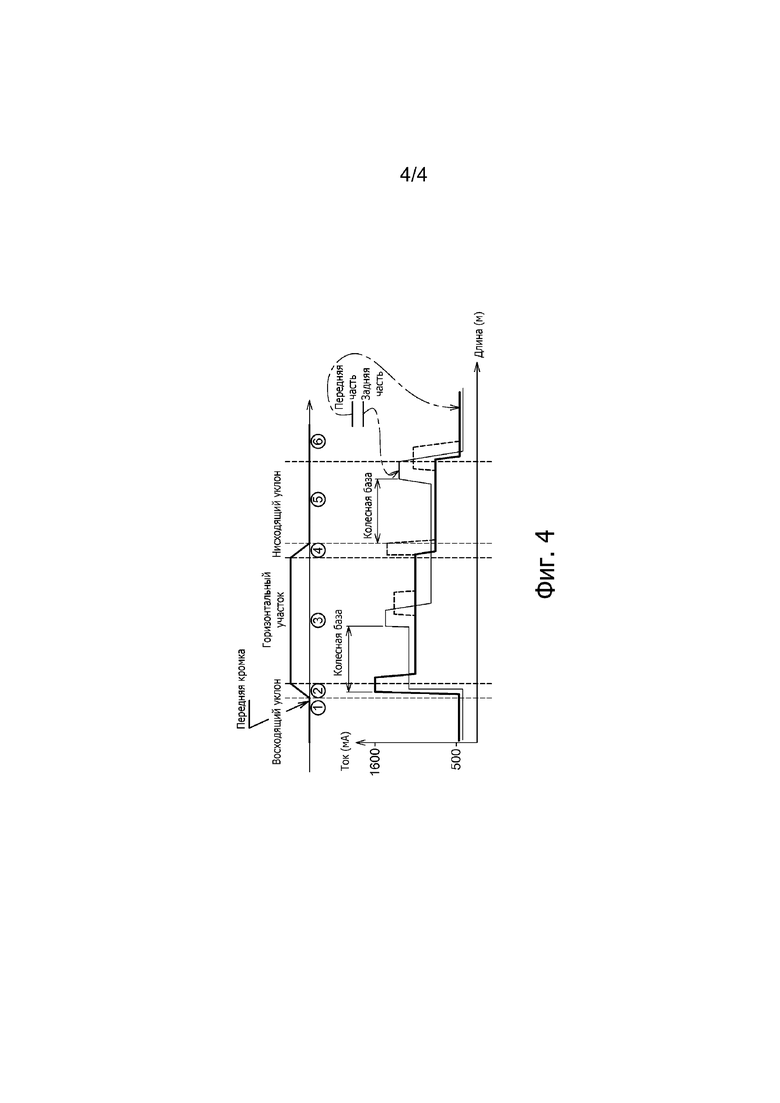
на фиг. 4 показан пример профилей электрических токов управления амортизаторами, полученных посредством осуществления этапов, представленных на фиг. 2.
На фиг. 1 показано транспортное средство 10, подъезжающее к искусственной дорожной неровности 11. В верхней части фиг. 4 искусственная дорожная неровность 11 показана в увеличенном виде. На этой схеме показаны зона 1, которая предшествует искусственной дорожной неровности, зона 2, образованная восходящим уклоном искусственной дорожной неровности, зона 3, образованная горизонтальным участком, зона 4, образованная нисходящим уклоном искусственной дорожной неровности, зона 5, которая следует за искусственной дорожной неровностью и на которой обычно ощущаются эффекты искусственной дорожной неровности, и, наконец, зона 6, сравнимая с зоной 1, в которой обычно транспортное средство должно вернуться к первоначальной ситуации после прохождения искусственной дорожной неровности.
Как известно, автотранспортное средство 10 содержит (не показанные) два передних колеса и два задних колеса, оснащенные, каждое, датчиком скорости вращения колеса и амортизатором с регулируемым по току коэффициентом амортизации. Автотранспортное средство 10 содержит также, как известно, (не показанные) по меньшей мере одну бортовую сеть типа CAN, LIN, автомобильный Ethernet или другую сеть и одно или несколько вычислительных устройств, связанных по меньшей мере с одной из бортовых сетей, а также соединенных или не соединенных при помощи входных-выходных соединителей с одним или несколькими датчиками, с одним или несколькими приводами и даже с одним или несколькими дисплеями.
Например, известная системная архитектура содержит вычислительное устройство типа ABS/ESP, получающее от каждого датчика измеренное значение скорости колеса и передающее эти измеренные значения в бортовую сеть, с которой оно соединено.
В соответствии с изобретением системная архитектура содержит вычислительное устройство для управления амортизаторами автотранспортного средства, содержащее электронный интерфейс связи с бортовой сетью для получения измеренного значения скорости вращения каждого колеса. Вычислительное устройство для управления амортизаторами содержит память, в которой записаны различные компьютерные программы, и процессор для исполнения записанной программы или записанных программ таким образом, чтобы генерировать электрические токи iav управления амортизаторами на передних колесах и токи iar управления амортизаторами на задних колесах.
В частности, вычислительное устройство для управления амортизаторами в соответствии с изобретением содержит процессор, выполненный с возможностью исполнять компьютерный программный продукт, записанный в памяти вычислительного устройства или доступный через сеть связи и включающий в себя команды для осуществления этапов способа, описанного ниже со ссылками на фиг. 2, когда эти команды исполняет процессор.
Способ управления амортизаторами транспортного средства 10 при прохождении искусственной дорожной неровности, в частности, искусственной дорожной неровности, подобной искусственной дорожной неровности 11, начинается с первоначального этапа 100 покоя, например, при прохождении перехода 101, подтвержденном сигналом запуска двигателя или другим сигналом, таким как электрическое включение зажигания транспортного средства или запрос пользователя на исполнение способа. Возможность исполнять или не исполнять способ по запросу пользователя обеспечивает последнему дополнительную свободу по сравнению со способом с систематическим исполнением.
Затем способ переходит на дежурный этап 102 в ожидании обнаружения искусственной дорожной неровности или другого типа эквивалентного замедлителя скорости движения. На этапе 102 амортизаторами можно управлять по току при помощи другого способа, не входящего в рамки изобретения, например, способа применения стратегии MRBF (плохая низкочастотная дорога), чтобы адаптировать коэффициент амортизации к качеству дорожного покрытия. На этапе 102 токи iav управления передними колесами и токи iar управления задними колесами устанавливают соответственно на значения iz1 и i’z1, которые являются, например, значениями, характерными для осуществления другого способа, и которые могут быть также постоянными по умолчанию в отсутствие другой стратегии, например, как показано на фиг. 4, около 500 мА.
На этапе 105 электрический ток iav управления передним амортизатором устанавливают на первое максимальное значение тока iz2 при обнаружении восходящего уклона искусственной дорожной неровности, чтобы получить высокий коэффициент амортизации на передних колесах. Повышение жесткости амортизаторов передних колес, которое происходит в результате увеличения коэффициента амортизации, позволяет противостоять слишком сильному сжатию пружин подвески, которое может привести к явлению подскока.
Переход 103 от этапа 102 к этапу 105 подтверждается значением сигнала MDA (въезд на искусственную дорожную неровность), который указывает на обнаружение восходящего уклона. В примере, представленном на фиг. 2, выбрано указание обнаружения восходящего уклона посредством перехода сигнала MDA от нуля к единице. Этот выбор будет сохранен в дальнейшем тексте описания для большей ясности, но при этом понятно, что он является чисто условным и что можно выбрать любые другие эквивалентные значения.
Сигнал MDA обнаружения восходящего уклона может поступать от специально предназначенного для этой цели датчика, например, от вертикального акселерометра или другого датчика.
На фиг. 3 представлена последовательность этапов способа, позволяющих обнаружить восходящий уклон без применения других датчиков, отличных от тех, которые уже обычно существуют в настоящее время на большинстве транспортных средств.
Последовательность этапов, предназначенную для обнаружения восходящего уклона без уточнения, является ли он подъемом искусственной дорожной неровности или другой неровностью, исполняют непрерывно в реальном времени после начала от первоначального этапа 200 покоя, например, при прохождении перехода 201, подтвержденного скоростью V транспортного средства ниже пороговой скорости Vs, например, 40 км/ч, и въезд на искусственную дорожную неровность следует производить ниже этого значения скорости.
Конкретная последовательность этапов способа, предназначенная для обнаружения восходящего уклона, начинается при этом дежурным этапом 204 ожидания подтверждения перехода 205, чтобы перейти на следующие этапы, при условии, что скорость V транспортного средства ниже пороговой скорости Vs.
Переход 215 подтверждается, если скорость V транспортного средства становится выше пороговой скорости Vs, чтобы способ опять перешел от дежурного 204 на первоначальный этап 200 покоя. Таким образом, когда транспортное средство движется за пределами зон ограничения скорости, в которых установлены замедлители скорости движения типа искусственной дорожной неровности или другие замедлители скорости движения, последовательность этапов обнаружения восходящего уклона не исполняют.
Параллельно с этапом 204 и со следующими этапами после этапа 204 на этапе 202 непрерывно вычисляют разность Δ измерений в реальном времени скоростей ω1, ω2, ω3, ω4 колес. При каждом периоде выборки на бортовой вычислительной шине транспортного средства вычисляют среднюю скорость вращения Ωm четырех колес транспортного средства. Максимальную скорость вращения ωМ двух передних колес транспортного средства принимают равной наиболее высокой из двух скоростей ω1, ω2 вращения передних колес. Разность Δ измерений в реальном времени получают, вычитая среднюю скорость вращения Ωm из максимальной скорости вращения ωМ. Иначе говоря, разность Δ равна максимуму скорости вращения ω1, ω2 передних колес, из которой вычитают среднее значение скоростей вращения ω1, ω2, ω3, ω4 колес транспортного средства.
Как известно, средняя скорость вращения Ωm пропорциональна скорости V продольного перемещения транспортного средства. Пока транспортное средство перемещается по прямой на гладкой дороге, скорости четырех колес по существу равны, и, следовательно, разность Δ измерений в реальном времени по существу является нулевой. Когда транспортное средство делает вираж на гладкой дороге, скорость ω1 или ω2 вращения внешнего на вираже переднего колеса превышает соответственно скорости ω2 или ω1 переднего колеса, внутреннего на вираже, и в этом случае максимальная скорость вращения ωМ двух передних колес равна скорости ω1 или соответственно ω2 вращения переднего колеса, внешнего на вираже.
Таким образом, разность Δ измерений в реальном времени является отрицательной, когда скорость передних колес ниже средней скорости вращения колес, которая характеризует скорость перемещения транспортного средства. Это явление наблюдается, когда передние колеса наталкиваются на препятствие, в частности, наезжают на переднюю кромку искусственной дорожной неровности.
В ходе трековых испытаний тестового транспортного средства первый параметризуемый порог S1 фиксируют в достаточно низком отрицательном значении, которое является как раз таким, чтобы характеризовать наезд передних колес на переднюю кромку искусственной дорожной неровности. Затем значение первого порога S1 сохраняют в памяти вычислительного устройства для серийных транспортных средств такого же типа, что и тестовое транспортное средство. В случае необходимости, значение первого порога S1 можно также адаптировать к стране, в которой регистрируется серийное транспортное средство, чтобы учитывать законодательство страны, относящееся к замедлителям скорости движения.
Прохождение первого порога S1 при значении разности Δ измерений в реальном времени, которое становится меньше отрицательного значения первого порога S1, подтверждает переход 205, который вызывает переход способа с этапа 204 на этап 206.
Этап 206 в основном является этапом ожидания прохождения второго порога S2, который теперь является положительным, разностью Δ измерений в реальном времени скоростей вращения колес, что будет пояснено ниже.
Когда передние колеса движутся в зоне 2 по восходящему уклону, восходящий уклон можно рассматривать как гипотенузу треугольника, в котором сторона прямого угла образована линией дорожного покрытия, компланарной с зоной 1, по которой продолжают двигаться задние колеса транспортного средства. В этом случае максимальная скорость вращения ωМ двух передних колес транспортного средства в зоне 2 превышает среднюю скорость вращения Ωm четырех колес, поскольку длина гипотенузы превышает длину стороны прямого угла.
В ходе трековых испытаний тестового транспортного средства второй параметризуемый порог S2 фиксируют в достаточно высоком положительном значении, которое является как раз таким, чтобы характеризовать прохождение передними колесами восходящего уклона. Затем значение второго порога S2 сохраняют в памяти вычислительного устройства для серийных транспортных средств такого же типа, что и тестовое транспортное средство, возможно адаптируя его к восходящему уклону в зависимости от страны регистрации серийного транспортного средства.
Прохождение второго порога S2 при значении разности Δ измерений в реальном времени, которая становится выше положительного значения второго порога S2, подтверждает переход 207 способа на этап 208.
Каждое прохождение порога S1, S2 рассматривают как нарастающий фронт сигнала обнаружения порога, который подсчитывают на этапах 206, 208. Значение счетчика, строго превышающее единицу, обеспечивает, таким образом, два последовательных прохождения порога, характеризующие восходящий уклон с передней кромкой. Это значение счетчика обнаруженных нарастающих фронтов, по меньшей мере равное двум, подтверждает переход 209 для активации этапа 210.
Для большей надежности в частном варианте осуществления можно запустить временную задержку на ноль на одном или на другом или на каждом из этапов 205, 206, чтобы подтвердить переход 203 возврата на дежурный этап 204 в случае времени t, превышающего значение t1 временной задержки, без необходимости перехода на следующий этап, чтобы перейти сразу на этап 210.
Этап 210 позволяет обнаружить восходящий уклон, устанавливая значение сигнала MDA (въезд на искусственную дорожную неровность), например, на 1, в соответствии с примером, представленным на фиг. 2, учитывая при этом, что можно предусмотреть любое другое эквивалентное и не обязательно бинарное значение, согласующееся с выбранным значением, чтобы активировать этапы, показанные на фиг. 2.
Возвращаясь на этап 105, описанный со ссылками на фиг. 2, можно отметить, что первое максимальное значение тока iz2 предназначено для борьбы с резким сжатием передней подвески транспортного средства, которое обычно происходит с не управляемыми амортизаторами. На этапе 105 максимальное значение тока iz2, на которое устанавливают электрический ток iav управления передним амортизатором, не обязательно является самым высоким значением, допускаемым спецификацией амортизатора, но является близким к нему. Понятие «максимальное» следует рассматривать как наиболее высокое по сравнению с другими значениями тока, устанавливаемыми в рамках способа. Для данного типа амортизатора максимальное значение тока iz2 может меняться в зависимости от параметров, внешних по отношению к способу, например, таких как параметр, характеризующий тип транспортного средства, параметр, характеризующий тип вождения, который может быть «спортивным», «комфортным» или другим, параметр, характеризующий вес загруженного транспортного средства, параметр, характеризующий скорость v транспортного средства, измеренную или вычисленную в момент подтверждения перехода 103, или другой параметр, выбираемый конструктором транспортного средства. В неограничивающем простом примере, показанном на фиг. 4, значение 1600 мА позволило получить хорошие результаты в ходе испытаний на кольцевых трассах, причем это значение соответствует использованию всей мощности амортизации тестируемого амортизатора.
Параллельно с этапом 105 активируют этап 104, на котором в реальном времени измеряют пройденное расстояние Dp, установленное на ноль в начале активации этапа 104. Расстояние Dp, пройденное транспортным средством с момента обнаружения восходящего уклона, как известно, можно вычислять при помощи тех же датчиков, которые выдают скорость вращения колес.
На этапе 111 электрический ток iav управления передним амортизатором устанавливают на второе значение тока iz3, меньшее первого значения тока iz2, когда передние колеса покинули зону 2 восходящего уклона. Испытания на кольцевой трассе показали, что значение iz3, находящееся по существу посередине между значениями iz1 и iz2, например, по существу равное 1000 мА, дает хорошие результаты.
Переход 108 от этапа 105 к этапу 111 может быть подтвержден обнаружением въезда на горизонтальный участок в зоне 3, на котором скорости вращения передних колес имеют хорошие шансы снова стать равными средней скорости вращения четырех колес.
Испытания показали, что более надежным критерием является подтверждение перехода 108, как только после обнаружения 103 восходящего уклона транспортное средство 10 проходит первое расстояние Х1, соответствующее длине восходящего уклона. Искусственные дорожные неровности или другие замедлители скорости движения обычно подчиняются правилам размерности, для которых длина восходящего уклона известна.
После прохождения восходящего уклона в отсутствие контроля амортизаторы передних колес стремятся к резкому расширению. Большие токи для получения высокого коэффициента амортизации позволяют ослабить резкость расширения. По сравнению с коэффициентом амортизации, достигнутым на этапе 105, меньший коэффициент амортизации на передних колесах, полученный на этапе 111, позволяет амортизаторам достаточно быстро вернуться в свое первоначальное положение.
После подтверждения перехода 103 при обнаружении восходящего уклона подтверждается переход 109, как только транспортное средство 10 пройдет второе расстояние Хе, равное колесной базе транспортного средства, то есть расстояние, которое отделяет передние колеса от задних колес. Подтверждение перехода 109 соответствует въезду задних колес на восходящий уклон.
Переход 109 активирует этап 112, на котором электрический ток iar управления задним амортизатором устанавливают на третье максимальное значение тока i’z2, чтобы получить высокий коэффициент амортизации на задних колесах. Этап 112, применяемый к задним колесам, сравним с этапом 105, применяемым для передних колес. Однако в данном случае значение тока i’z2 считается максимальным по отношению к значениям, на которые был установлен электрический тока iar управления задним амортизатором в ходе способа. Значение тока i’z2, менее высокое, чем значение тока iz2, обеспечивает достаточное сжатие задних амортизаторов, чтобы избежать слишком резкого наклона вперед транспортного средства при подъеме его задней части, что могло бы привести к повторному сжатию передних амортизаторов. В примере, представленном на фиг. 4, значение тока i’z2 составляет около 1500 мА.
На этапе 114 электрический ток iar управления задним амортизатором устанавливают на четвертое значение тока i’z3, меньшее третьего значения тока i’z2, когда задние колеса покидают зону 2 восходящего уклона. В примере, представленном на фиг. 4, значение i’z3, находящееся по существу посередине между значениями i’z1 и i’z2, например, равное 800 мА, показало хорошие результаты.
Если установить переход 113, применяемый к задним колесам, сравнимый с переходом 108, применяемым к передним колесам, то переход 113 от этапа 112 к этапу 114 подтверждается, как только транспортное средство 10 пройдет расстояние Х2, соответствующее сумме длины восходящего уклона Х1 и колесной базы Хе.
Менее высокий коэффициент амортизации на задних колесах, полученный на этапе 114, приводит к эффекту, сравнимому, при сохранении соответствующих пропорций, с эффектом, полученным на этапе 111 на передних колесах.
В возможном варианте осуществления заявленного способа перед этапом 112 активируют дополнительный этап 106 сразу после подтверждения перехода 103 и перед подтверждением перехода 109.
На этапе 106 электрический ток iar управления задним амортизатором устанавливают на пятое значение тока i’z1+, находящееся в пределах между третьим значением i’z2 и четвертым значением i’z3 тока, пока транспортное средство 10 не прошло расстояние Хе, равное колесной базе транспортного средства, после обнаружения восходящего уклона на передних колесах.
Это позволяет подготовить постепенное повышение коэффициента амортизации на задних колесах. В частности, значение i’z1+, превышающее значение i’z1, позволяет бороться со слишком резким сокращением задних амортизаторов в результате подъема передней части транспортного средства на восходящем уклоне, не поглощенного достаточным сжатием передних амортизаторов по причине повышения жесткости этих амортизаторов при значении тока iz2.
На этапе 118 электрический ток iav управления передним амортизатором устанавливают на шестое значение тока iz4, находящееся в пределах между значением, показанным жирной линией на фиг. 4 для зоны 5, меньшим второго значения тока iz3, и значением, показанным пунктирной линией на фиг. 4 для зоны 4, по существу равным значению тока i’z2.
Переход 115 от этапа 111 на этап 118 подтверждается значением сигнала DDA (съезд с искусственной дорожной неровности), которое показывает обнаружение нисходящего уклона. В примере, представленном на фиг. 2, указание на обнаружение нисходящего уклона соответствует переходу сигнала DDA от нуля к единице. Этот выбор будет сохранен в дальнейшем тексте описания для большей ясности, но при этом понятно, что он является чисто условным и что можно предусмотреть любой другой выбор эквивалентных значений.
Можно представить, что сигнал DDA обнаружения нисходящего уклона может выдавать специально предусмотренный для этого датчик, например, вертикальный акселерометр или другой датчик, или он может быть получен посредством контроля пройденного расстояния Dр, если длина горизонтального участка в зоне 3 известна.
Можно также предусмотреть последовательность этапов способа, позволяющую обнаружить нисходящий уклон только при помощи датчиков, уже обычно существующих в настоящее время на большинстве транспортных средств, в продолжение этапов, описанных ранее со ссылками на фиг. 3.
Последовательность этапов, предназначенную для обнаружения нисходящего уклона, исполняют непрерывно в реальном времени после этапа 210 обнаружения восходящего уклона посредством подтверждения перехода 211, который свидетельствует, что передние колеса покинули восходящий уклон.
Длина восходящего уклона редко превышает длину колесной базы транспортного средства. В большинстве случаев можно с полным основанием ожидать, что передние колеса замедляются после прохождения через восходящий уклон и достигают на горизонтальном участке в зоне 3 скорости вращения, сравнимой со скоростью вращения задних колес, которые еще не достигли восходящего уклона. Прохождение разности Δ измерений в реальном времени скоростей колес ω1, ω2, ω3, ω4 ниже положительного порога S3, меньшего, чем порог S2, представляет собой хороший критерий подтверждения перехода 211. Следует заметить, что этот критерий остается в силе в маловероятном случае, когда восходящий уклон имеет длину, превышающую длину колесной базы.
Конкретная последовательность этапов способа, предназначенная для обнаружения нисходящего уклона, начинается дежурным этапом 212 ожидания подтверждения перехода 205 к следующим этапам при условии, что скорость V транспортного средства ниже пороговой скорости Vs.
Дежурный этап может состоять в переустановке временной задержки t на этапах 206 и 208, чтобы вернуться на этап 204, если по истечении предельного времени t1 не был обнаружен никакой нисходящий уклон. Следует отметить, что можно выбрать предельное время t1 с фиксированным значением или обратно пропорциональное скорости v транспортного средства, или же предельное время t1 можно заменить предельной длиной горизонтального участка в зоне 3, заменив время t измерением в реальном времени дистанции перемещения транспортного средства.
Прохождение четвертого порога S4 при значении разности Δ измерений в реальном времени, которое становится больше положительного значения второго порога S4 и, возможно равным порогу S2, подтверждает при этом переход 213 способа на этап 214. Следует отметить, что значения порогов S1 и S3 можно скорректировать в фазе испытания прототипа транспортного средства. Значения порогов S2 и S4 тоже можно установить в фазе испытания прототипа транспортного средства или заранее определить посредством простого тригонометрического вычисления, если известны угол или углы наклона восходящего и нисходящего уклонов.
Этап 214 позволяет обнаружить нисходящий уклон посредством установки значения сигнала DDA (съезд с искусственной дорожной неровности), например, на 1 в соответствии с примером, представленным на фиг. 2, учитывая при этом, что можно предусмотреть любое другое эквивалентное и не обязательно бинарное значение, согласующееся со значением, выбранным для активации этапов, показанных на фиг. 2.
Возвращаясь к этапу 118, описанному со ссылками на фиг. 2, можно сказать, что повышенное значение тока iz4, показанное пунктирной линией на фиг. 4 в зоне 4, позволило бы эффективно противостоять резкому расширению на передней подвеске транспортного средства, которое обычно наблюдают в случае не управляемых амортизаторов. Однако испытания показали, что слишком сильное сопротивление расширению при съезде передних колес с нисходящего уклона могло бы привести к опусканию передней части транспортного средства вплоть до упора передних колес на выходе из зоны 4, сравнимого с упором, наблюдаемым на передней кромке, как было описано ранее. Наконец, испытания показали, что можно выбрать значение тока iz4, которого как раз достаточно, чтобы избегать слишком резкого расширения. В частности, значение тока iz4, находящееся между значением тока iz1 и значением тока iz3, например, порядка 750 мА на фиг. 4, позволяет после обнаружения нисходящего уклона искусственной дорожной неровности правильно уменьшить коэффициент амортизации на передних колесах, чтобы должным образом амортизировать расширение на указанных передних колесах.
Переход 115, подтвержденный при обнаружении нисходящего уклона на передних колесах, тоже позволяет способу перейти от этапа 114 к этапу 121, на котором электрический ток iar управления задним амортизатором устанавливают на восьмое значение тока i’z4, находящееся в пределах между третьим значением тока i’z2 и четвертым значением тока i’z3, чтобы получить средне-высокий коэффициент амортизации на задних колесах.
В примере, представленном на фиг. 4, значение тока i’z4 равно значению тока i’z3. Иначе говоря, в примере, показанном на фиг. 4, на значение электрического тока iar управления задним амортизатором не влияет прохождение передних колес по нисходящему уклону.
После подтверждения перехода 115 при обнаружении нисходящего уклона подтверждается переход 122, как только транспортное средство 10 пройдет второе расстояние Хе, равное колесной базе транспортного средства, иначе говоря, в данном случае расстояние, которое отделяет передние колеса от задних колес. Подтверждение перехода 122 соответствует достижению нисходящего уклона задними колесами.
Переход 122 активирует этап 123, на котором электрический ток iar управления задним амортизатором устанавливают на девятое значение тока i’z5, находящееся в пределах между вторым значением тока iz3 и третьим значением тока i’z2, как только транспортное средство 10 проходит расстояние Хе, равное длине колесной базы транспортного средства и измеренное на этапе 116.
В примере, представленном на фиг. 4, значение тока i’z5, по существу равное 750 мА, позволяет увеличить коэффициент амортизации на задних колесах, который является достаточным, чтобы избежать слишком сильного подскока на задних колесах.
Переход 124 подтверждается, когда расстояние Dp, измеренное на этапе 116, становится больше значения XMd, характеризующего полный съезд транспортного средства с искусственной дорожной неровности.
Подтверждение перехода 124 возвращает способ на этап 102, на котором сигналы MDA и MDD опять устанавливают на ноль, токи iav и iar опять устанавливают на их соответствующие значения iz1 и i’z1, вычисленные за пределами искусственной дорожной неровности.
В варианте осуществления способа можно убедиться, что транспортное средство прошло минимальное расстояние Xm после обнаружения въезда передних колес на восходящий уклон, чтобы можно было уменьшить электрический ток iav управления передним амортизатором, как в случае обнаружения достижения передними колесами нисходящего уклона. Этот вариант может представлять интерес при прохождении замедлителей скорости движения с короткой последовательностью восходящего уклона и нисходящего уклона.
В графическим изображении схемы на фиг. 2 этот вариант выражается добавлением этапа 110, который продолжает этап 104 измерения расстояния Dp, пройденного транспортным средством после обнаружения восходящего уклона.
Переход 107, подтвержденный значением пройденного расстояния, превышающим минимальное расстояние Xm, позволяет способу перейти от этапа 104 на этап 110, при этом переход 115 может привести к переходу способа от этапа 111 на этап 118, только если по меньшей мере этапы 110 и 111 являются активными. На этапе 110 просто продолжают измерять пройденное расстояние, которое было переустановлено на ноль в начале этапа 104.
Для большей надежности переход 117 подтверждают, когда пройденное расстояние Dp, которое измеряют на этапе 104 или, возможно, на этапе 110, становится превышающим максимальное расстояние XMm, которое уже не позволяет надеяться на обнаружение нисходящего уклона искусственной дорожной неровности.
Подтверждение перехода 117 возвращает при этом способ на этап 102 ожидания возможного нового обнаружения восходящего уклона, принадлежащего к другому замедлителю скорости движения.
В варианте способ может содержать этап 120, на котором электрический ток iav управления передним амортизатором устанавливают на седьмое значение тока iz5, превышающее шестое значение тока iz4, как только транспортное средство 10 пройдет после обнаружения нисходящего уклона расстояние Х3, соответствующее сумме длин нисходящего уклона и колесной базы, чтобы опять увеличить коэффициент амортизации на передних колесах, когда задние колеса приближаются к концу нисходящего уклона. Этот вариант соответствует на фиг. 4 пунктирной линии, которая проходит над зонами 5 и 6, при значении iz5, по существу равном 1000 мА.
На графическом изображении схемы на фиг. 2 этот вариант выражается переходом 119, который позволяет способу перейти от этапа 118 на этап 120, когда пройденное расстояние, измеренное на этапе 116, превышает Х3.
На фиг. 4 следует также отметить, что изменения значения токов в амортизаторах происходят постепенно.
Изобретение относится к управлению амортизаторами. Автотранспортное средство содержит вычислительное устройство с электронным интерфейсом для связи с бортовой сетью. Устройство содержит память с компьютерной программой и процессор. Способ управления амортизаторами транспортного средства при прохождении искусственной дорожной неровности содержит следующие этапы. Непрерывно вычисляют разность измерений в реальном времени скоростей колес. Обнаруживают восходящий уклон после прохождения по меньшей мере одного порога указанной разностью измерений. Устанавливают электрический ток управления передним амортизатором на первое максимальное значение тока при обнаружении восходящего уклона дорожной неровности для получения повышенного коэффициента амортизации на передних колесах. Устанавливают электрический ток управления передним амортизатором на второе значение тока, меньшее указанного первого значения, как только после обнаружения восходящего уклона транспортное средство проходит первое расстояние, соответствующее длине восходящего уклона, для получения меньшего коэффициента амортизации на передних колесах. Достигается возможность реагировать удовлетворительным образом на отдельную неровность. 3 н и 7 з.п. ф-лы, 4 ил.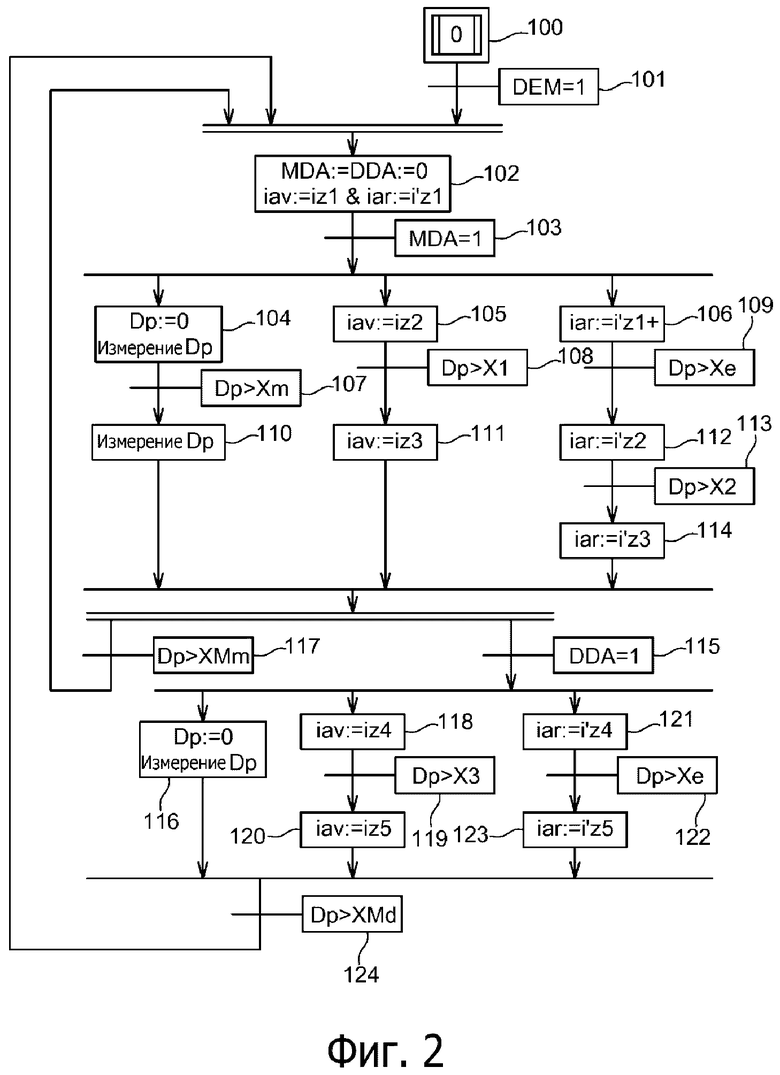
1. Способ управления амортизаторами транспортного средства (10) при прохождении искусственной дорожной неровности (11), отличающийся тем, что содержит следующие этапы, на которых:
- непрерывно вычисляют (202) разность (Δ) измерений в реальном времени скоростей колес (ω1, ω2, ω3, ω4);
- обнаруживают (210) восходящий уклон после прохождения (205, 207) по меньшей мере одного порога (S1, S2) указанной разностью (Δ) измерений в реальном времени;
- устанавливают (105) электрический ток (iav) управления передним амортизатором на первое максимальное значение тока (iz2) при обнаружении (103) восходящего уклона искусственной дорожной неровности для получения повышенного коэффициента амортизации на передних колесах;
- устанавливают (111) указанный электрический ток (iav) управления передним амортизатором на второе значение тока (iz3), меньшее указанного первого значения тока (iz2), как только после обнаружения (103) восходящего уклона транспортное средство (10) проходит (108) первое расстояние (Х1), соответствующее длине восходящего уклона, для получения меньшего коэффициента амортизации на передних колесах.
2. Способ управления по п. 1, отличающийся тем, что содержит этапы, на которых:
- устанавливают (112) электрический ток (iar) управления задним амортизатором на третье максимальное значение тока (i’z2), как только после обнаружения (103) восходящего уклона транспортное средство (10) проходит (109) второе расстояние (Хе), равное колесной базе транспортного средства, для получения повышенного коэффициента амортизации на задних колесах;
- устанавливают (114) указанный электрический ток (iar) управления задним амортизатором на четвертое значение тока (i’z3), меньшее указанного третьего значения тока (i’z2), как только после обнаружения (103) восходящего уклона транспортное средство (10) проходит (113) третье расстояние (Х2), равное сумме длины восходящего уклона и колесной базы, для получения меньшего коэффициента амортизации на задних колесах.
3. Способ управления по п. 2, отличающийся тем, что содержит этап, на котором:
- устанавливают (106) указанный электрический ток (iar) управления задним амортизатором на пятое значение тока (i’z1+), находящееся в пределах между указанным третьим и указанным четвертым значениями тока, после обнаружения (103) восходящего уклона и пока транспортное средство (10) не прошло (109) указанное второе расстояние (Хе), равное колесной базе транспортного средства, для подготовки повышения коэффициента амортизации на задних колесах.
4. Способ управления по одному из пп. 1-3, отличающийся тем, что содержит этапы, на которых:
- устанавливают (118) указанный электрический ток (iav) управления передним амортизатором на шестое значение тока (iz4), меньшее второго значения тока (iz3), при обнаружении (115) нисходящего уклона искусственной дорожной неровности, чтобы уменьшить коэффициент амортизации на передних колесах;
- устанавливают (120) указанный электрический ток (iav) управления передним амортизатором на седьмое значение тока (iz5), превышающее указанное шестое значение тока (iz4), как только после обнаружения (115) нисходящего уклона транспортное средство (10) проходит (119) четвертое расстояние (Х3), соответствующее сумме длины нисходящего уклона и колесной базы, чтобы опять повысить коэффициент амортизации на передних колесах.
5. Способ управления по одному из пп. 2 или 3, отличающийся тем, что содержит этапы, на которых:
- устанавливают (121) указанный электрический ток (iar) управления задним амортизатором на восьмое значение тока (i’z4), находящееся в пределах между указанным третьим значением тока (i’z2) и указанным четвертым значением тока (i’z3) при обнаружении (115) нисходящего уклона, для получения средне-высокого коэффициента амортизации на задних колесах;
- устанавливают (123) указанный электрический ток (iar) управления задним амортизатором на девятое значение тока (i’z5), находящееся в пределах между указанным вторым значением тока (iz3) и указанным третьим значением тока (i’z2), как только после обнаружения (103) нисходящего уклона транспортное средство (10) проходит (113) указанное второе расстояние (Хе), равное колесной базе транспортного средства, для получения более высокого коэффициента амортизации на задних колесах.
6. Способ управления по одному из пп.1-5, отличающийся тем, что разность (Δ) равна максимуму скоростей вращения (ω1, ω2) передних колес, из которого вычитают среднее значение скоростей вращения (ω1, ω2, ω3, ω4) колес транспортного средства.
7. Способ управления по п. 6, отличающийся тем, что восходящий уклон обнаруживают после первого прохождения (205) отрицательного порога (S1), за которым следует второе прохождение (207) положительного порога (S2).
8. Способ управления по одному из пп. 1-6, отличающийся тем, что содержит этап, на котором:
- обнаруживают (214) нисходящий уклон после прохождения (211, 213) по меньшей мере одного порога (S3, S4) указанной разностью (Δ) измерений в реальном времени после обнаружения (210) восходящего уклона.
9. Вычислительное устройство для управления амортизаторами автотранспортного средства, содержащее электронный интерфейс связи с бортовой сетью, память, в которой записан компьютерный программный продукт, содержащий команды для осуществления этапов способа по одному из пп. 1-8, когда эти команды исполняет процессор, и процессор для исполнения указанной программы так, чтобы генерировать электрические токи (iav, iar) управления амортизаторами.
10. Автотранспортное средство (10), содержащее бортовую сеть и вычислительное устройство по п. 9, соединенное с указанной бортовой сетью.
| DE 102014208318 A1, 05.11.2015 | |||
| СИЛОВАЯ УСТАНОВКА ЛЕТАТЕЛЬНОГО АППАРАТА, СОДЕРЖАЩАЯ УЗЛЫ ПОДВЕСКИ ДВИГАТЕЛЯ, СМЕЩЕННЫЕ ВНИЗ НА КОРПУСЕ ВЕНТИЛЯТОРА | 2009 |
|
RU2487057C2 |
| KR 20150064541 A, 11.06.2015 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ АМОРТИЗАЦИЕЙ КОЛЕБАНИЙ | 2009 |
|
RU2498913C2 |

