Изобретение относится к области измерительной техники, в частности, к измерительным системам, использующим моделирующие устройства, и может быть применено как при создании комбинированных систем управления одновинтовым вертолетом, так и в качестве непосредственного измерителя при летных испытаниях вертолетов.
Известен бортовой измеритель моментов внешних сил, содержащий трехкомпонентный блок измерителей абсолютной угловой скорости, трехкомпонентное устройство подстройки моментов инерции, связанное с вычислителем момента, и сумматоры, входы которых подключены к вычислителю момента [1].
Недостатком известного измерителя [1] является то, что обеспечивается измерение моментов внешних сил в возмущенном движении, содержащих сумму управляющих и возмущающих моментов.
Для целей управления вертолетом путем создания САУ, работающей по принципу компенсации возмущений, возникает задача измерения суммарного момента внешних возмущающих сил, действующих на фюзеляж вертолета и, отдельно, определение управляющего момента. Решение данной задачи приведено в [2]. Недостатком является то, что он обеспечивает измерение только внешних возмущающих моментов. Для качественного управления требуется еще управление по поступательным ускорениям, т.е. требуется измерение еще и внешних возмущающих сил.
Целью изобретения является обеспечение одновременного измерения не только моментов внешних возмущающих сил и моментов управляющих сил, действующих на фюзеляж одновинтового вертолета, но также измерение внешних возмущающих сил по трем осям.
Поставленная цель достигается тем, что в устройство введены датчики нормальных и касательных составляющих силы тяги несущего винта, датчик крутящего момента несущего винта, датчики изгибающих моментов несущего винта, и датчик тяги хвостового винта, вычислитель управляющих моментов, входы которого соединены с выходами датчиков, а выходы с входами сумматоров, а также вычислитель координат центра масс вертолета, выходы которого соединены с входами устройства подстройки моментов инерции и с входами вычислителя управляющих моментов. Кроме того, введены шесть однокомпонентных измерителей кажущихся ускорений.
На фиг. 1 представлена блок-схема измерителя моментов внешних сил, состоящая из датчиков 1, 2, касательных составлявших тяги несущего винта и датчиков 3, 4 изгибающих моментов несущего винта, датчика 5 нормальной составляющей тяги несущего винта и датчика 6 тяги хвостового винта; датчика 7 крутящего момента несущего винта, вычислителя 8 координат центра масс, трехкомпонентного блока 9 измерителей абсолютной угловой скорости, вычислителя 10 управляющих моментов, трехкомпонентного устройства 11 подстройки моментов инерции, вычислителя момента 12 и сумматоров 13, 14, 15. К вычислителям 10 и 12 подключен командный датчик 16 для поправок при сбросе груза или отстреле ракет.
На фиг. 2 представлены измерители кажущихся ускорений 17-22, установленных попарно по осям симметрии с разнесением на расстояния Lx,Ly,Lz на борту вертолета и подключенных к входам вычислителей 23. Расстояния до центра тяжести О (координаты Ха, Ya, Za) для первых акселерометров 17, 19, 21 в парах Az, Ay, Ах, показаны для начальных параметров и в дальнейшем уточняются работой вычислителей 10 и 12.
Выходы с 23 вместе с выходами с 10 и 12 подключены к входам вычислителя 24 возмущающих сил по осям вертолета.
Выходы трехкомпонентного блока 9 измерителей абсолютной скорости соединены с входами вычислителя момента 12, выходы которого соединены с входами сумматоров 13, 14, 15. Вторые входы сумматоров соединены с выходом вычислителя 10 управляющих моментов, входы которого соединены с выходами датчиков нормальной 1 и касательных 2, 3 составляющих тяги несущего винта, с выходами датчиков 4, 5 изгибающих моментов несущего винта, с выходом датчика 6 тяги хвостового винта, и с выходом датчика 7 крутящего момента несущего винта.
Выходы вычислителя 8 координат центра масс, соединены с входами вычислителя 10 управляющих моментов и с входами трехкомпонентного устройства 11 подстройки моментов инерции, выходы которого соединены с входами вычислителя момента 12
Работает измеритель возмущающих моментов следующим образом.
Трехкомпонентный блок 9 измерителей абсолютной угловой скорости, измеряет компоненты абсолютной угловой скорости и дает полную информацию о вращательном движении объекта на вход вычислителя момента 12. Вычислитель 12 определяет суммарные моменты по динамическим уравнениям, описывающим вращательное движение объекта. От внешних датчиков 16 или от оператора на вход вычислителя 8 координат центра масс и на вход устройства 11 подстройки моментов инерции поступают сигналы X1…Xn, об изменении массы горючего в топливных баках, о перемещении грузов и т.д. Сигналы с 16 поступают и на входы вычислителей 10, 12 для оперативной коррекции параметров.
Вычислитель 8 координат центра масс вычисляет изменения координат центра масс объекта, которые поступают на вход устройства 11 подстройки моментов инерции, пересчитывающего моменты инерции вертолета с учетом изменения массы отдельных элементов и передающего сигналы об этом в вычислитель момента 12. Эти же сигналы поступают и на вход вычислителя 10 управляющих моментов, на который также поступают сигналы с датчиков 1, 2, 3 составляющих тяги несущего винта, с датчиков 4, 5 изгибающих моментов, с датчика 6 тяги хвостового винта и с датчика 7 крутящего момента несущего винта.
С выхода вычислителя 10 снимается значение величин управляющих моментов относительно текущего значения центра масс вертолета, которые поступают на вторые входы сумматоров 13, 14, 15. На первые входы сумматоров поступают сигналы с вычислителя момента 12. С выходов сумматоров снимаются сигналы, пропорциональные суммарным моментом внешних сил, действующих на объект. Указанные моменты являются возмущающими моментами внешних сил.
Сигналы акселерометров в парах Az, Ay, Ах, индекс 1 оговорен выше, а с индексом 2 для акселерометров 18, 20, 22, не равны в общем случае,

Здесь учитывается, что имеются погрешности от центростремительных ускорений при вращении объекта вокруг осей.
Средние значения 

При условиях Xa=-Lx/2, Ya=-Ly/2, Za=-Lz/2, т.е. при симметричном расположении акселерометров относительно центра тяжести О, средние значения дают точные значения измеряемых ускорений Wx, Wy, Wz.
При нарушении симметрии, вплоть до смены знака координат первых датчиков, как показано на фиг. 2, необходима коррекция для средних значений по соотношениям



Сигналы Wx, Wy, Wz или 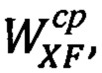

 приводим к горизонтальной системе координат.
приводим к горизонтальной системе координат.
Динамические уравнения поступательных движений вертолета:



Управляющие сигналы  ,
,  ,
,  вырабатываются в элементах 17-22 (акселерометры), а также в 23-24. Определяются
вырабатываются в элементах 17-22 (акселерометры), а также в 23-24. Определяются  ,
,  ,
,  и компенсируются через посредство
и компенсируются через посредство  ,
,  ,
,  .
.
Измеренные блоком 9 абсолютные угловые скорости ωх, ωу, ωz. Алгоритмы вычислителя 12 моментов суммарных внешних сил Мх, Му, Mz на основе этих угловых скоростей имеют вид:



где Jx, Jy, Jz - моменты инерции ЛА. Угловые ускорения определяются по алгоритмам НУИ Льюинбергера на основе кинематических соотношений, связывающих угловые скорости ωx(t), ωy(t), ωz(t) с их производными.
Выделение моментов внешних возмущающих сил производится в сумматорах 13, 14, 15. Управляющие сигналы  ,
,  ,
,  вырабатываются в элементах 1, 2, 3 и 6.
вырабатываются в элементах 1, 2, 3 и 6.
Положительный эффект заключается в том, что измеряется не только сумма управляющего и возмущающего моментов, действующих на весь объект, но и отдельно моменты внешних возмущающих сил, действующих на фюзеляж вертолета и моменты со стороны винтов; измерения этих моментов необходимо для построения системы управления, работающей по принципу компенсации возмущений.
Источники:
1. Авторское свидетельство СССР №538610, кл. G05В 17/02, 1975.
2. Плотников П.К. Бортовой измеритель моментов внешних сил. Авт.св. №537610, кл. G05В 17/02, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| Способ управления аэродинамическими моментами вертолета соосной схемы | 2023 |
|
RU2820873C1 |
| СПОСОБ УМЕНЬШЕНИЯ УГЛА АТАКИ НЕСУЩЕГО ВИНТА НА ПРЕДПОСАДОЧНЫХ МАНЕВРАХ ОДНОВИНТОВОГО ВЕРТОЛЕТА (ВАРИАНТЫ) | 2014 |
|
RU2539621C1 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2796703C2 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2788013C1 |
| ВЕРТОЛЕТ С ОДНИМ НЕСУЩИМ ВИНТОМ И СПОСОБ КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА ОДНОВИНТОВОГО ВЕРТОЛЕТА | 1993 |
|
RU2086476C1 |
| СИСТЕМА КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА ОДНОВИНТОВОГО ВЕРТОЛЁТА | 2003 |
|
RU2245821C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| Вертолет соосной схемы (варианты) | 2023 |
|
RU2820875C1 |


Измеритель внешних возмущающих сил и моментов этих сил, действующих на фюзеляж одновинтового вертолета, содержит блок измерителей абсолютной угловой скорости, устройство подстройки моментов инерции, связанное с вычислителем момента, сумматоры, датчики нормальной и касательной составляющих силы тяги несущего винта, датчик крутящего момента и датчик тяги хвостового винта, вычислитель координат центра масс вертолета, соединенные определенным образом, а также шесть измерителей кажущихся ускорений по два размещенных датчика на каждую ось вертолета, выходы которых связаны с соответствующими сумматорами определения средних в паре ускорений. Обеспечивается одновременное измерение моментов внешних возмущающих сил и моментов управляющих сил, действующих на фюзеляж одновинтового вертолета по трем осям. 2 ил.
Измеритель внешних возмущающих сил и моментов этих сил, действующих на фюзеляж одновинтового вертолета, содержащий блок измерителей абсолютной угловой скорости, устройство подстройки моментов инерции, связанное с вычислителем момента, и сумматоры, выходы которых подключены к вычислителю момента, отличающийся тем, что в его состав дополнительно введены датчики нормальной и касательной составляющих силы тяги несущего винта, датчик крутящего момента и датчик тяги хвостового винта, вычислитель координат центра масс вертолета, при этом входы управляющих моментов соединены с выходами указанных датчиков, а выходы - с входами сумматоров, а выходы вычислителя координат центра масс вертолета соединены с входами устройства подстройки моментов инерции и с входами вычислителя управляющих моментов, в состав измерителя внешних возмущающих сил и моментов этих сил введены шесть измерителей кажущихся ускорений по два размещенных датчика на каждую ось вертолета, их выходы связаны с соответствующими сумматорами определения средних в паре ускорений, в правых частях уравнений поступательных движений вертолета учитываются управляющие силы.
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
| US 11029709 B1, 08.06.2021. | |||

