Область техники, к которой относится изобретение.
Настоящее изобретение относится к летательным аппаратам, включающим в себя два ротора на одной оси, расположенных в корпусе, один из которых - ротор с лопастными винтами, а второй - ротор встречного вращения, выполненных с возможностью обеспечения равенства моментов вращения роторов.
Уровень техники.
Известен из уровня техники гиростабилизированный летательный аппарат, использующий встречное движение роторов с лопастными винтами, для создания подъемной силы, включающий в себя два ротора на одной оси, расположенных в корпусе, один из которых - ротор с лопастными винтами, а второй - ротор встречного вращения, выполненных с возможностью обеспечения равенства моментов вращения роторов, см. заявку на патент на изобретение №2019120429, опубликовано в 2021 г.
Данное устройство является наиболее близким по технической сущности к заявленному изобретению и взято за прототип. Таким образом, предлагаемое в данном описании устройство будет описано в терминах отличий от прототипа.
Недостатком данного устройства является невысокая степень стабилизации летательного аппарата во время полета. Это связано с отсутствием систем, связанных с компенсацией реактивного момента, возникающих в связи с взаимодействием лопастных винтов с воздухом для создания подъемной силы и которое выводит устройство из равновесия.
Раскрытие изобретения.
Настоящее изобретение, главным образом, имеет целью предложить летательный аппарат, включающий в себя два ротора на одной оси, расположенных в корпусе, один из которых - ротор с лопастными винтами, а второй - ротор встречного вращения, выполненных с возможностью обеспечения равенства моментов вращения роторов, позволяющий обеспечить повышение степени стабилизации летательного аппарата, во время полета, что и является поставленной технический задачей.
Для достижения этой цели
 роторы выполнены в виде кольцеобразных маховиков, которые соединены с двигателями разгона через множество валиков, выполненных с возможностью раскручивания роторов в противоположные стороны,
роторы выполнены в виде кольцеобразных маховиков, которые соединены с двигателями разгона через множество валиков, выполненных с возможностью раскручивания роторов в противоположные стороны,
в корпусе расположены рули и импеллерные двигатели поворота, выполненные с возможностью изменения пространственной ориентации летательного аппарата во время полета,
все двигатели и рули соединены с источником питания.
Благодаря таким выгодным характеристикам появляется возможность устранения паразитного действия прецессий и биений, что позволяет удерживать устройство все время в равновесии во время полета. Это становится возможным за счет компенсации сил, равных по моменту инерции тел, но имеющих противоположное вращение и вывешенных в едином жестком корпусе. Так же за счет расположение и отсутствия крепления роторов в центральной части, и за счет крепления с двигателями разгона через множество валиков, упрощается конструкция летательного аппарата. А за счет того, что в корпусе расположены рули и импеллерные двигатели поворота, выполненные с возможностью изменения пространственной ориентации летательного аппарата во время полета, соединенные с блоком управления, обеспечивается гиростабилизация летательного аппарата в горизонтальных плоскостях. Добавление рулей, позволяет в активном режиме доруливать, что компенсирует переменные реактивные моменты и дополнительно позволяет управлять полетом летательного аппарата.
Существует еще один возможный, но не обязательный вариант изобретения, в котором ротор с лопастными винтами имеет привод изменения угла наклона лопастей, соединенный с блоком управления.
Благодаря таким выгодным характеристикам появляется возможность варианта исполнения летательного аппарата с регулировкой подъемной силы.
Наконец, существует также и такой вариант изобретения, в котором каждый ротор имеет вес в диапазоне 10-30% от общего веса летального аппарата
Благодаря таким выгодным характеристикам появляется возможность обеспечения достаточного начального запаса кинетической энергии, которую проще потом поддерживать во время полета.
Краткое описание чертежей.
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
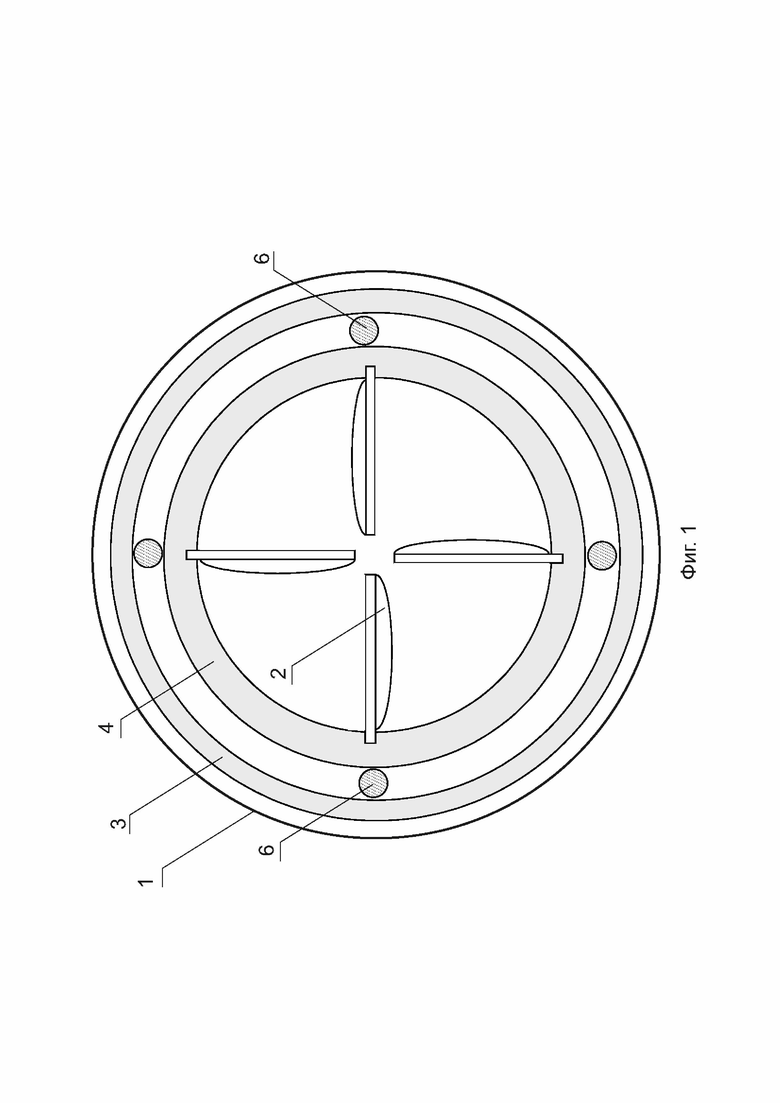
- фигура 1 изображает принципиальную схема летательного аппарата, согласно изобретению,
- фигура 2 изображает вертикальный разрез летательного аппарата, согласно изобретению,
- фигура 3 изображает еще один вертикальный разрез летательного аппарата с постоянным шагом винта, согласно изобретению,
- фигура 4 изображает вертикальный разрез летательного аппарата, и момент регулировки угла наклона лопастей, согласно изобретению,
- фигура 5 изображает горизонтальный разрез летательного аппарата и частичный вертикальный разрез, показывающий вывешивание роторов в корпусе, согласно изобретению,
- фигура 6 изображает внешний вид летательного аппарата, согласно изобретению, вариант частично разобранный,
- фигура 7 изображает внешний вид летательного аппарата, согласно изобретению, вариант собранный,
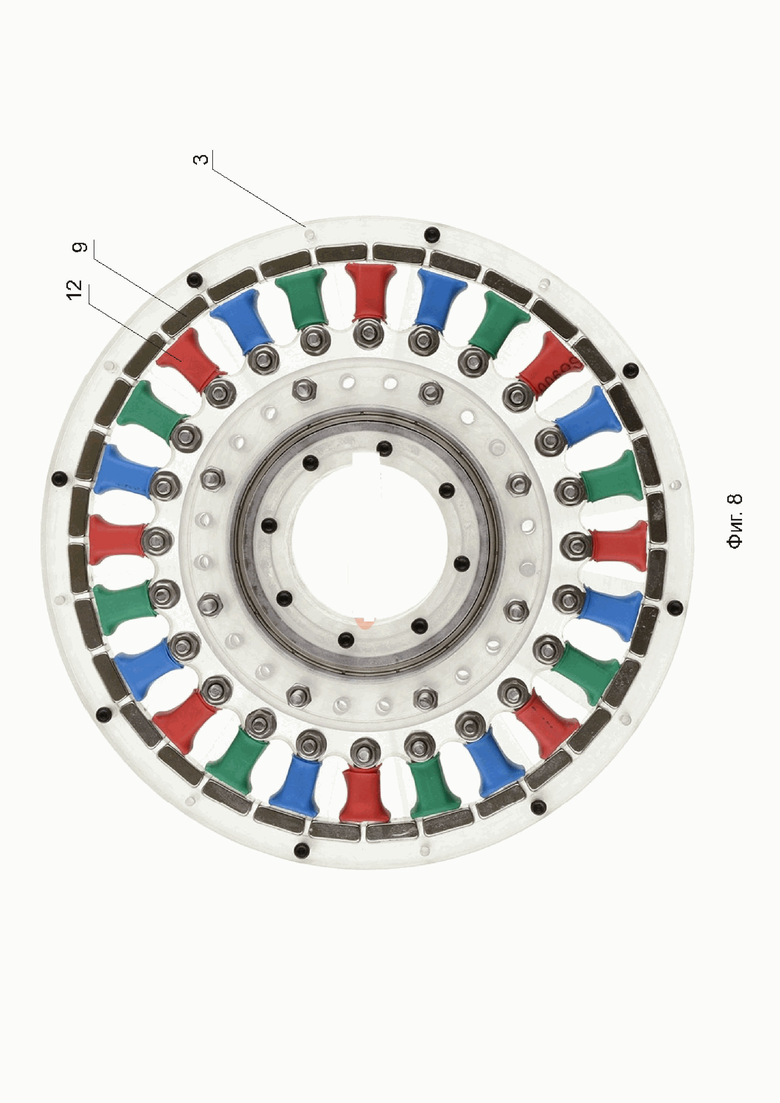
- фигура 8 изображает горизонтальный разрез летательного аппарата и устройство двигателя разгона роторов, согласно изобретению.
На фигурах 1-8 обозначено:
1 - корпус, внутренняя часть
2 - лопастные винты,
3 - ротор встречного вращения (внешний ротор вращения),
4 - ротор с лопастными винтами 2 (внутренний ротор вращения),
5 - двигатель разгона,
6 - валики (согласования роторов),
7 - рули,
8 - импеллерные двигатель поворота,
9 - постоянные магниты
10 - поворотный механизм привода изменения угла наклона лопастей,
11 - внешний обтекатель (внешняя часть корпуса),
12 - электромагниты
13 - модуль компенсации реактивного момента (расческа с зафиксированными плоскостями)
14 - внешний шаговый двигатель
15 - дополнительная подвижная площадка на внутреннем роторе 4,
16 - подшипники.
Согласно фигурам 1- 8 летательный аппарат включает в себя два ротора на одной оси, расположенных в корпусе 1, один из которых - ротор 4 с лопастными винтами 2, а второй - ротор 3 встречного вращения. Они выполнены с возможностью обеспечения равенства моментов вращения роторов. Роторы 3 и 4 включают в себя кольцеобразные маховики, которые соединены с двигателями 5 разгона, и установлены в корпусе 1 через множество валиков 6, выполненных с возможностью раскручивания роторов 3 и 4 в противоположные стороны. В корпусе 1 расположены рули 7 и импеллерные двигатели поворота 8, выполненные с возможностью изменения пространственной ориентации летательного аппарата во время полета, соединенные с блоком управления, который для простоты не показан на фигурах.
Все двигатели 5 и 8 и рули 7 соединены с источником питания, который для простоты также не показан на фигурах.
Ротор 4 с лопастными винтами имеет привод изменения угла наклона лопастей, соединенный с блоком управления.
Двигатели разгона 5 преимущественно выполнены бесколлекторными и элементы двигателя размещены на корпусе 1.
Каждый маховик может иметь вес в диапазоне 10-30% от общего веса летального аппарата.
Роторы 3 и 4 преимущественно выполнены из листовых материалов с помощью лазерной резки, позволяющей получить достаточную точность изготовления тел вращения. Они могут быть выполнены из простых материалов, комбинирую как металлические части, так и пластиковые или углепластиковые детали.
Летательный аппарат размещается в обтекаемый внешний корпус 11 - обеспечивающую общую обтекаемость и аэродинамику аппарата.
Привод изменения угла наклона лопастных винтов 2 (см. фиг 4.) меняет угол наклона лопастей при помощи поворотного механизма 10 изменения угла наклона лопастей с помощью внешнего шагового двигателя 14, размещенного на корпусе 1 с помощью поднимаемого и опускаемого подшипника он поднимает и опускает дополнительную подвижную площадку 15 на внутреннем роторе, площадка передает это механическое движение на поворот лопасти. См. фиг 4.
На фигуре 5 показаны два варианта возможного расположения валиков для удержания роторов вращения:
а) с удержанием из центра между вращающимися роторами (фиг 5А),
б) с помощью подшипников, размещенных на корпусе (фиг. 5 Б).
Осуществление изобретения.
Летательный аппарат работает следующим образом. Приведем наиболее исчерпывающий пример реализации изобретения. Имея в виду, что данный пример не ограничивает применения изобретения.
Предварительно производят вывешивание роторов.
Это может быть выполнено
А) из внутренней части: на U-образных подшипниках, минимально в трех точках для каждого из роторов и равномерно расставленных между роторами.
Б) снаружи: на роликах качения, размещенных на корпусе
Для взлета раскручивают роторы.
Для разгона роторов используют бесколлекторные электродвигатели, размещенные между роторами и систему из согласующих валиков, которые выполняют функцию выравнивания момента инерции. Электромагниты располагаются между роторами, постоянные магниты размещаются на роторах и при раскрутке через систему валов, электромагниты раскручивают роторы в противоположные стороны.
Во время полета компенсируют отклонения реактивного момента:
А) Пассивно: используют стабилизацию (компенсаторы реактивного момента при рабочем положении лопастей)
Б) Активно: используют парные рули - аэродинамические органы управления, симметрично расположенные в нижней части летательного аппарата, см. позицию 7.
Для обеспечения горизонтального полета производят управление исходящих воздушных потоков с помощью рулей и импеллерных дополнительных двигателей.
А) Они могут быть помещены в исходящий поток (управление и поворот), как описано ранее.
Б) Они могут быть расположены на внешних плоскостях летательного аппарата (малые импеллерные двигатели, толкающие или тянущие винты).
Промышленная применимость.
Летательный аппарат может быть осуществлен специалистом на практике и при осуществлении обеспечивают реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
С целью подтверждения работоспособности данной конструкции летательного аппарата в реальных условиях была проведена серия расчетов и моделирование обтекания четырхлопастного винта в кольце.
Результатом моделирования обтекания четырхлопастного винта в кольце являлись стационарные поля физических величин: давления, плотности и скорости как в расчетной зоне, так и непосредственно на поверхности лопасти, что позволило определить аэродинамические характеристики винта в различных режимах и при различных углах установки лопасти. В потоке над лопастью линии тока направлены вдоль оси вращения внутрь кольца, то есть образуется эффект всасывания окружающего воздуха в канал, образуемый кольцом. За лопастью наблюдается существенное ускорение осевой скорости течения на цилиндрической поверхности порядка радиуса кольца и его закручивание сонаправленное с направлением вращения винта. С уменьшением радиуса и увеличением расстояния осевая скорость уменьшается и, как следствие, возрастает величина закрутки течения. Выяснилось, что будет производиться скручивание линий тока в жгут под центральным телом, где осевая скорость практически нулевая. Это означает образование спиралевидных вихрей в нижней части потока в окрестности оси вращения. Данное моделирование и макетные испытания показали эффективность размещения лопастью на внешней части кольца, где их осевая скорость будет наибольшая. А использование тел вращения позволяет получить эффект гиростабилизации и в сумме стабилизировать систему.
Таким образом, в результате расчетов было показано, что данная конструкция летательного аппарата обеспечивает повышение степени стабилизации летательного аппарата во время полета, то есть его гиростабилизацию в горизонтальных плоскостях.
Кроме того, показано, что данная конструкция летательного аппарата имеет следующие преимущества
1. Движение роторное винтовое гиростабилизированное.
2. Летательный аппарат имеет особенность, состоящую в совмещение системы хранения энергии и винтовой части.
3. Летательный аппарат не имеет дополнительно вынесенных стабилизаторов.
4. Летательный аппарат имеет компактные габариты и возможность минимизировать шумы при движении.
Кроме того, возможно применение летательного аппарата как парашюта или парашютных платформ.
В качестве двигателей летательного аппарата могут использоваться наборы высокооборотных, но маломощных двигателей, которые могут располагаться на корпусе по кругу между вращающимися роторами, и создавать суммирующую силу.
Дополнительные преимущества предлагаемой конструкции летательного аппарата:
5. Снимаются конструктивные ограничения максимальной скорости, для винтовой части, расширяется диапазон безопасных скоростей полета.
6. Увеличивается грузоподъемность летательного аппарата, весовое и энергетическое совершенство.
7. Жесткий ротор способен придать силовую гироскопическую стабилизацию летательного аппарата. Снижаются потери аэродинамического качества на продольную и поперечную балансировку.
8. Минимизируются дисбаланс и вибрация.
9. Полностью исключаются: земной резонанс и ряд опасных режимов в полете.
10. Снимаются ограничения по размерам ротора.
11. Снижается чувствительность к атмосферной турбулентность в полете.
12. Обеспечивается всепогодность. Надежный вертикальный взлет и вертикальная посадка возможны в сложных условиях.
13. Ниже требования к мощности и надежности силовой установки.
14. Упрощается пилотирование. Проще система управления и стабилизации. Появляется возможность полной автоматизации полета.
15. Легкие жесткие лопасти, сделанные из прочных материалов, снижают нагрузки в шарнирах и системе управления. Выше ресурс ротора и надежность системы управления.
16. Простые варианты реализации автоматов перекоса упрощают систему управления, единую и универсальную для всех режимов полета.
17. Упрощается конструкция винтов и ротора, и летательного аппарата в целом. Улучшается технологичность. Снижается себестоимость.
18. Минимизация потерь энергии, через рекуперацию энергии маховиков обратно в электроэнергию.





Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов с устройствами компенсации вращательного момента воздушного винта. Летательный аппарат включает в себя два ротора на одной оси, расположенные в кольцевом корпусе, один из которых – ротор с лопастным винтом в кольце, а второй – ротор встречного вращения, выполненные с возможностью обеспечения равенства моментов вращения роторов. Роторы выполнены в виде кольцеобразных маховиков, которые соединены с двигателями разгона через множество валиков, выполненных с возможностью раскручивания роторов в противоположные стороны. В нижней части летательного аппарата в нисходящем потоке от лопастного винта расположены рули, на внешних плоскостях летательного аппарата расположены импеллерные двигатели поворота, при этом рули и импеллерные двигатели поворота выполнены с возможностью изменения пространственной ориентации летательного аппарата во время полета, все двигатели и рули соединены с источником питания. Обеспечивается гиростабилизация летательного аппарата в горизонтальной плоскости. 2 з.п. ф-лы, 8 ил.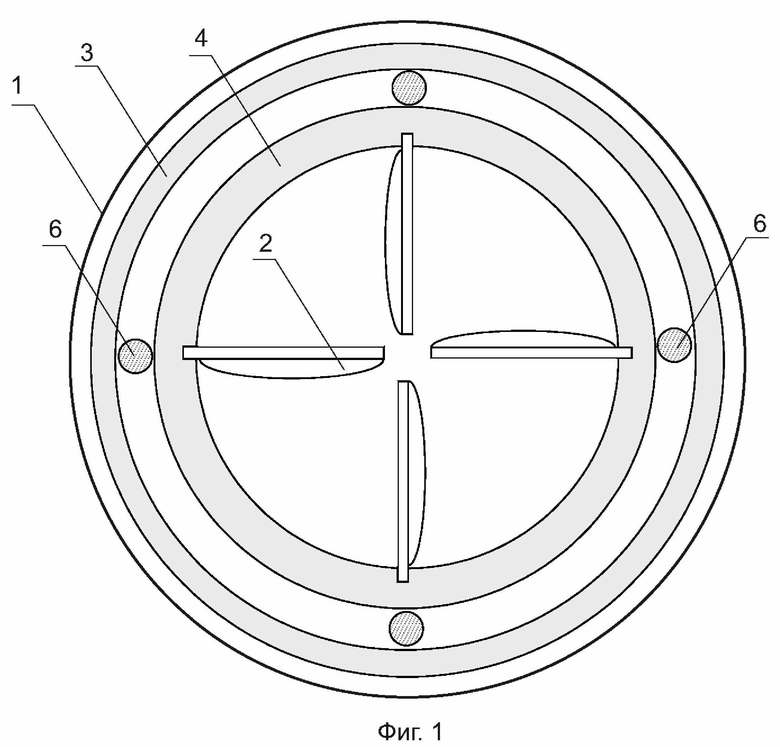
1. Летательный аппарат, включающий в себя два ротора на одной оси, расположенные в кольцевом корпусе, один из которых – ротор с лопастным винтом в кольце, а второй – ротор встречного вращения, выполненные с возможностью обеспечения равенства моментов вращения роторов, отличающийся тем, что роторы выполнены в виде кольцеобразных маховиков, которые соединены с двигателями разгона через множество валиков, выполненных с возможностью раскручивания роторов в противоположные стороны, в нижней части летательного аппарата в нисходящем потоке от лопастного винта расположены рули, на внешних плоскостях летательного аппарата расположены импеллерные двигатели поворота, при этом рули и импеллерные двигатели поворота выполнены с возможностью изменения пространственной ориентации летательного аппарата во время полета, все двигатели и рули соединены с источником питания.
2. Летательный аппарат по п.1, отличающийся тем, что ротор с лопастными винтами имеет привод изменения угла наклона лопастей, соединенный с блоком управления.
3. Летательный аппарат по п.1, отличающийся тем, что каждый ротор имеет вес в диапазоне 10-30% от общего веса летательного аппарата.
| RU 2019120429 A, 11.01.2021 | |||
| US 20100264256 A1, 21.10.2010 | |||
| US 6086016 A1, 11.07.2000 | |||
| RU 2002132848 A, 27.05.2004 | |||
| ШЕРСТОСГОННАЯ МАШИНА | 0 |
|
SU171506A1 |

