Изобретение относится к области автоматического управления и может быть использовано в различных системах управления движением, в том числе станочном оборудовании, роботах, манипуляторах.
Известен способ формирования траектории и устройство для его осуществления (Фомин, Н. В. Системы управления электроприводами: учебное пособие. - Магнитогорск: ФГБОУ ВПО «МГТУ», 2014. с. 196-200). Согласно способу задают целевую координату траектории, вычисляют рассогласование целевой координаты и текущей координаты траектории, далее в зависимости от рассогласования целевой координаты и текущей координаты траектории, а также в зависимости от предельной величины первой производной траектории формируют первую производную траектории, затем интегрируют первую производную траектории и формируют текущую координату траектории, причем предельную величину первой производной траектории устанавливают заранее; первую производную траектории формируют по релейному закону таким образом, что ее направление совпадает с направлением рассогласования целевой координаты и текущей координаты траектории, первая производная траектории при ненулевой величине указанного рассогласования по абсолютной величине равна предельной величине первой производной траектории, а при нулевой величине указанного рассогласования первая производная траектории равна нулю.
Устройство, реализующее данный способ, представляет собой структуру «задатчик интенсивности первого рода» и содержит задатчик целевой координаты траектории, выход которого соединен с первым входом вычислителя рассогласования, выход вычислителя рассогласования соединен с входом релейного регулятора, выход которого соединен с входом интегратора, выход интегратора соединен со вторым входом вычислителя рассогласования, а на втором его выходе.
Недостатком данного технического решения является сниженная точность формирования траектории при достижении ее текущей координатой величины целевой координаты из-за наличия автоколебательной составляющей, что связано с формированием первой производной траектории по релейному закону.
Известен также способ формирования траектории и устройство для его осуществления (Соловьев В.А. Системы управления электроприводами. Ч. 1: Учебное пособие. - Комсомольск-на-Амуре: ГОУВПО «КнАГТУ», 2004. с. 116-118). Согласно способу задают целевую координату траектории, вычисляют рассогласование целевой координаты и текущей координаты траектории, далее усиливают это рассогласование, затем ограничивают усиленное рассогласование в зависимости от его направления и предельной величины первой производной траектории, формируют первую производную траектории, затем интегрируют первую производную траектории и формируют текущую координату траектории, причем усиление рассогласования целевой координаты и текущей координаты траектории устанавливают заранее; предельную величину первой производной траектории устанавливают заранее.
Устройство, реализующее данный способ, представляет собой структуру «задатчик интенсивности первого рода» и содержит задатчик целевой координаты траектории, выход которого соединен с первым входом вычислителя рассогласования, выход вычислителя рассогласования соединен с входом усилителя с ограничением выхода, выход усилителя с ограничением выхода соединен с входом интегратора, выход интегратора соединен со вторым входом вычислителя рассогласования.
Недостатком данного технического решения является сниженная точность формирования траектории при достижении ее текущей координатой величины целевой координаты из-за наличия автоколебательной составляющей, возникающей в зависимости от усиления рассогласования целевой координаты и текущей координаты траектории, а также в зависимости от предельной величин в первой производной траектории.
Наиболее близким по технической сущности к заявляемому изобретения является способ формирования траектории и устройство для его осуществления (Системы управления электроприводов: Учебник для студ. Высш. учеб. заведений / В.М. Терехов, О.И. Осипов; Под ред. В.М. Терехова. - М.; Издательский центр «Академия», 2005. с. 244-245). Согласно способу задают целевую координату траектории, вычисляют рассогласование целевой координаты и координаты обратной связи, далее в зависимости от рассогласования целевой координаты и координаты обратной связи, а также в зависимости от предельной величины первой производной траектории формируют целевую величину первой производной траектории, затем вычисляют рассогласование целевой величины первой производной траектории и текущей величины первой производной траектории, далее в зависимости от рассогласования целевой величины первой производной траектории и текущей величины первой производной траектории, а также в зависимости от предельной величины второй производной траектории формируют вторую производную траектории, затем интегрируют вторую производную траектории и формируют текущую величину первой производной траектории, затем в зависимости от текущей величины первой производной траектории, предельной величины второй производной траектории и направления текущей первой производной траектории формируют задание тормозного пути, затем интегрируют текущую величину первой производной траектории и формируют текущую координату траектории, далее суммируют текущую координату траектории с заданием тормозного пути и вычисляют координату обратной связи, причем предельную величину первой производной траектории и предельную величину второй производной траектории устанавливают заранее; целевую величину первой производной траектории формируют по релейному закону таким образом, что ее направление совпадает с направлением рассогласования целевой координаты и координаты обратной связи, целевая величина первой производной траектории при ненулевой величине указанного рассогласования по абсолютной величине равна предельной величине первой производной, а при нулевой величине указанного рассогласования целевая величина первой производной траектории равна нулю; вторую производную траектории формируют по релейному закону таким образом, что его направление совпадает с направлением рассогласования целевой первой производной и текущей первой производной траектории, вторая производная траектории при ненулевой величине указанного рассогласования по абсолютной величине равна предельной величине второй производной, а при нулевой величине указанного рассогласования вторая производная траектории равна нулю.
Устройство, реализующее данный способ, представляет собой структуру «задатчик интенсивности второго рода» и содержит задатчик целевой координаты траектории, выход которого соединен с первым входом первого вычислителя рассогласования, выход первого вычислителя рассогласования соединен с входом первого релейного регулятора, выход которого соединен с первым входом второго вычислителя рассогласования, выход второго вычислителя рассогласования соединен с входом второго релейного регулятора, выход которого соединен с входом первого интегратора, первый выход первого интегратора соединен со вторым входом второго вычислителя рассогласования, второй выход первого интегратора соединен с входом функционального преобразователя, третий выход первого интегратора соединен с входом второго интегратора, выход которого соединен с первым входом сумматора, второй вход сумматора соединен с выходом функционального преобразователя, выход сумматора соединен со вторым входом первого вычислителя рассогласования.
Недостатком настоящего технического решения является сниженная точность формирования траектории при достижении ее текущей координатой величины целевой координаты из-за наличия автоколебательной составляющей, что связано с формированием целевой величины первой производной траектории по релейному закону и с формированием второй производной траектории по релейному закону.
Технической задачей предлагаемого изобретения является устранение автоколебательной составляющей в траектории при достижении ее текущей координатой величины целевой координаты.
Технический результат заключается в повышении точности формирования траектории.
Это достигается тем, что в известном способе формирования траектории, включающем задание целевой координаты траектории, вычисление рассогласования целевой координаты и координаты обратной связи, далее в зависимости от рассогласования целевой координаты и координаты обратной связи, а также в зависимости от предельной величины первой производной траектории формирование целевой величины первой производной траектории, затем вычисление рассогласования целевой величины первой производной траектории и текущей величины первой производной траектории, далее в зависимости от рассогласования целевой величины первой производной траектории и текущей величины первой производной траектории, а также в зависимости от предельной величины второй производной траектории формирование второй производной траектории, затем интегрирование второй производной траектории, при этом ограничивают интегрирование второй производной траектории в зависимости от предельной величины первой производной траектории и формируют текущую величину первой производной траектории, затем в зависимости от текущей величины первой производной траектории, предельной величины второй производной траектории и направления текущей первой производной траектории формируют задание тормозного пути, затем интегрируют текущую величину первой производной траектории и формируют текущую координату траектории, далее суммируют текущую координату траектории с заданием тормозного пути и вычисляют координату обратной связи, далее детектируют участок торможения траектории в зависимости от целевой координаты траектории, начальной координаты траектории и координаты обратной связи, затем на участке торможения траектории детектируют завершение формирования траектории, затем устанавливают текущую координату траектории равной целевой координате траектории, задание тормозного пути устанавливают равным нулю, первую производную траектории устанавливают равной нулю, причем предельную величину первой производной траектории и предельную величину второй производной траектории устанавливают заранее; целевую величину первой производной траектории формируют по релейному закону таким образом, что ее направление совпадает с направлением рассогласования целевой координаты и координаты обратной связи, целевая величина первой производной траектории при ненулевой величине указанного рассогласования по абсолютной величине равна предельной величине первой производной, а при нулевой величине указанного рассогласования целевая величина первой производной траектории равна нулю; вторую производную траектории формируют по релейному закону таким образом, что его направление совпадает с направлением рассогласования целевой первой производной и текущей первой производной траектории, вторая производная траектории при ненулевой величине указанного рассогласования по абсолютной величине равна предельной величине второй производной, а при нулевой величине указанного рассогласования вторая производная траектории равна нулю; в качестве начальной координаты траектории принимают текущую координату траектории при изменении целевой координаты траектории; на участке торможения траектории детектируют завершение формирования траектории таким образом, что детектируют формирование текущей координаты траектории в обратном направлении по отношению к предыдущей координате траектории, иначе в зависимости от начальной координаты траектории, текущей координаты траектории и целевой координаты траектории детектируют превышение текущей координатой траектории целевой координаты траектории либо их равенство.
Это достигается также тем, что известное устройство, реализующее способ формирования траектории, содержащее задатчик целевой координаты траектории, первый вычислитель рассогласования, первый релейный регулятор, второй вычислитель рассогласования, второй релейный регулятор, функциональный преобразователь и сумматор, при этом выход первого вычислителя рассогласования соединен с входом первого релейного регулятора, выход первого релейного регулятора соединен с первым входом второго вычислителя рассогласования, выход которого соединен с входом второго релейного регулятора, второй вход сумматора соединен с выходом функционального преобразователя, снабжено первым интегральным регулятором, вторым интегральным регулятором и логическим блоком управления, при этом первый выход задатчика целевой координаты соединен с первым входом первого вычислителя рассогласования, выход второго релейного регулятора соединен с первым входом первого интегрального регулятора; первый выход первого интегрального регулятора соединен со вторым входом второго вычислителя рассогласования, второй выход первого интегрального регулятора соединен с первым входом функционального преобразователя, а третий выход первого интегрального регулятора соединен с первым входом второго интегрального регулятора; первый выход второго интегрального регулятора соединен с первым входом сумматора, второй выход второго интегрального регулятора соединен с первым входом логического блока управления, второй вход которого соединен с первым выходом сумматора, а третий его вход соединен со вторым выходом задатчика целевой координаты; второй выход сумматора соединен со вторым входом первого вычислителя рассогласования; первый выход логического блока управления соединен со вторым входом второго интегрального регулятора, а второй его выход соединен со вторым входом функционального преобразователя; третий выход логического блока управления соединен со вторым входом первого интегрального регулятора, а четвертый его выход соединен с третьим входом второго интегрального регулятора.
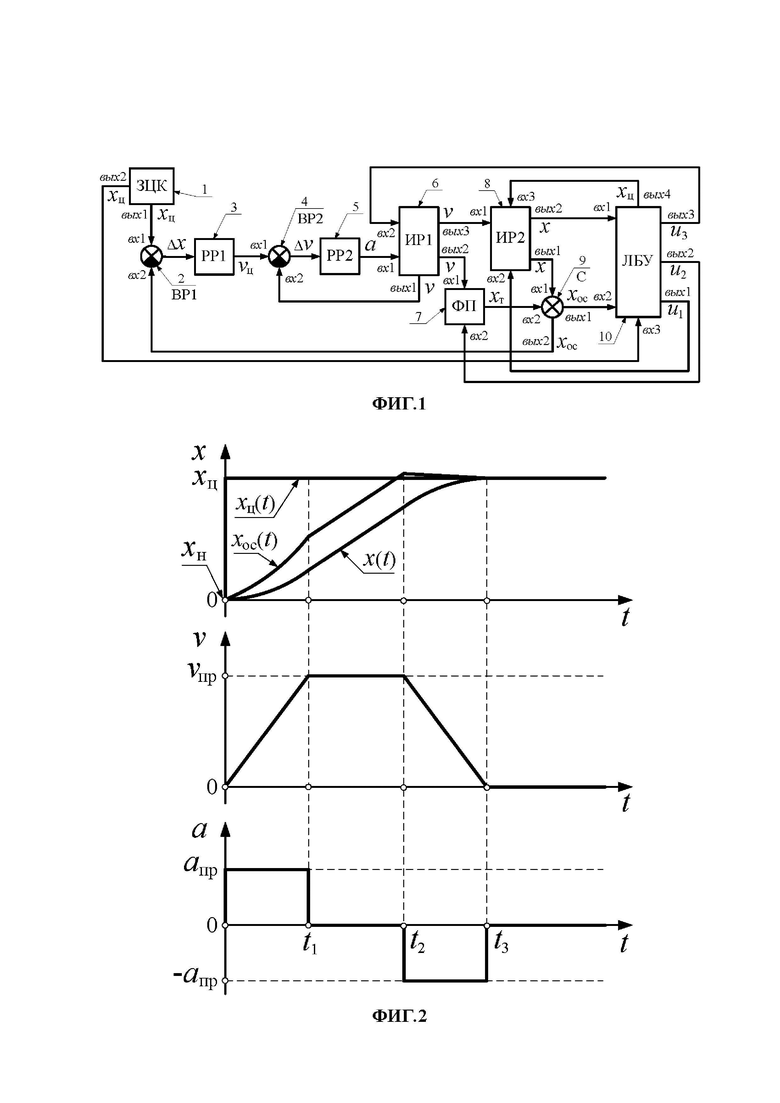
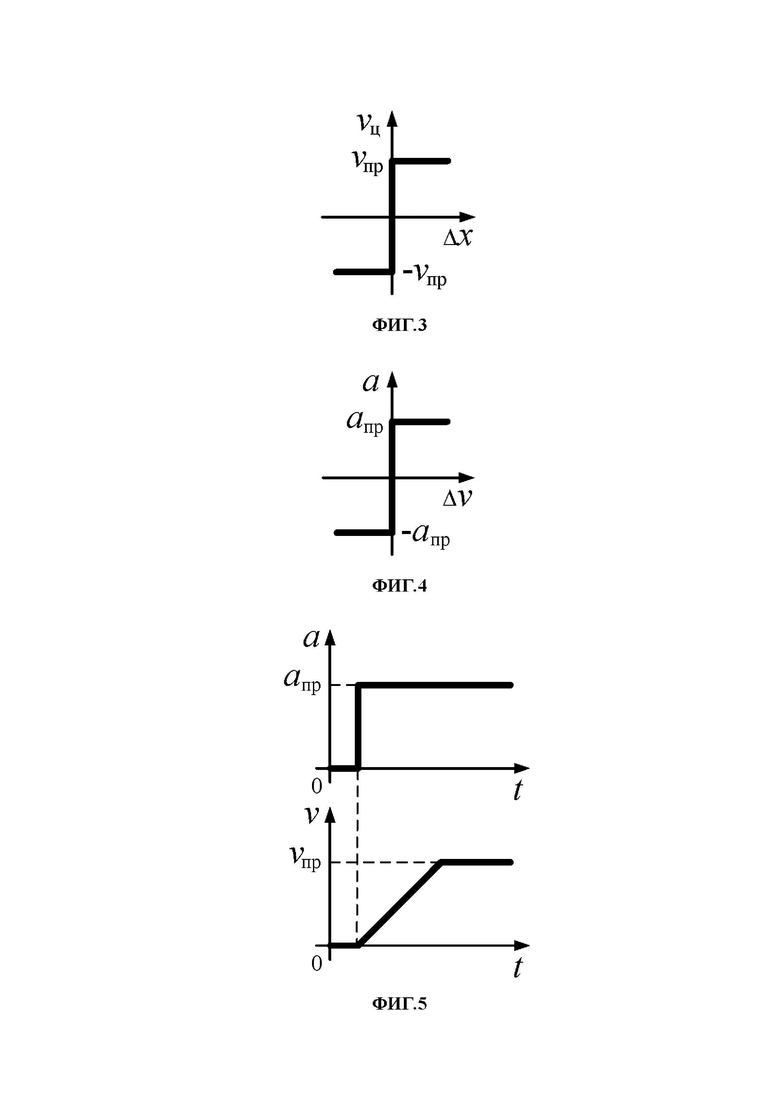
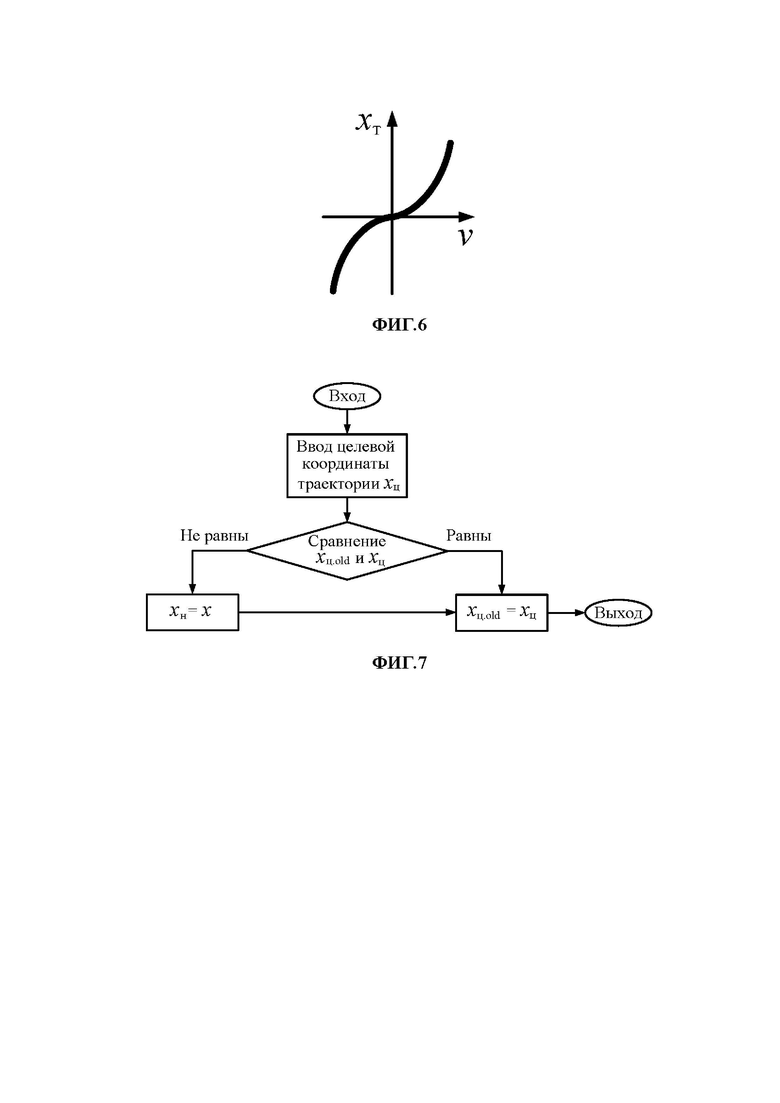
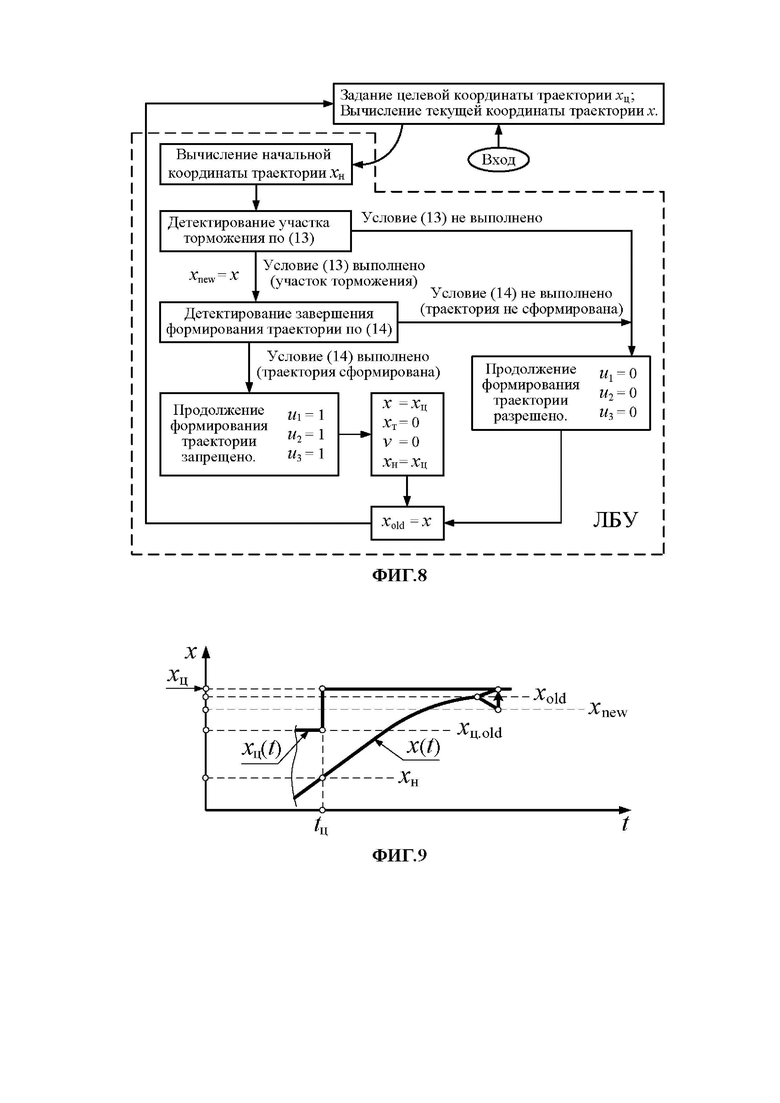
Сущность предлагаемых технических решений поясняется чертежами, где на фиг. 1 изображена функциональная схема устройства, реализующего заявленный способ формирования траектории; на фиг. 2 показаны диаграммы формирования траектории при осуществлении предложенного способа формирования траектории; на фиг. 3 представлена характеристика «вход - выход» первого релейного регулятора; на фиг. 4 представлена характеристика «вход - выход» второго релейного регулятора; на фиг. 5 показана характеристика «вход - выход» при изменении выходного сигнала первого интегрального регулятора при отработке скачка входного сигнала; на фиг. 6 представлена характеристика «вход - выход» функционального преобразователя; на фиг. 7 изображена блок-схема вычисления начальной координаты траектории; на фиг. 8 изображена блок-схема логического блока управления; на фиг. 9 - фиг. 12 показаны диаграммы детектирования завершения формирования траектории при осуществлении предложенного способа формирования траектории; на фиг. 13 показаны диаграммы формирования траектории согласно способу и реализующему его устройству по прототипу.
На графических изображениях приняты следующие обозначения: t - время; а - текущая величина второй производной траектории; апр - предельная величина второй производной траектории; ν - текущая величина первой производной траектории; νпр - предельная величина первой производной траектории; νц - целевая величина первой производной траектории; Δν - рассогласование целевой величины первой производной траектории и текущей величины первой производной траектории; х - текущая координата траектории; хц - целевая координата траектории; хн - начальная координата траектории; Δх - рассогласование целевой координаты траектории и текущей координаты траектории; хт - задание тормозного пути; хос - координата обратной связи;  - логический сигнал для управления вторым интегральным регулятором;
- логический сигнал для управления вторым интегральным регулятором;  - логический сигнал для управления функциональным преобразователем;
- логический сигнал для управления функциональным преобразователем;  - логический сигнал для управления первым интегральным регулятором; xold - значение координаты траектории, предшествующее текущему ее значению; xnew - текущее значение координаты траектории на участке торможения; хц.old - значение целевой координаты, предшествующее текущему ее целевому значению хц; t1, t2, t3 - временные границы участков траектории; tц - момент времени изменения целевой координаты траектории хц от значения хц.old.
- логический сигнал для управления первым интегральным регулятором; xold - значение координаты траектории, предшествующее текущему ее значению; xnew - текущее значение координаты траектории на участке торможения; хц.old - значение целевой координаты, предшествующее текущему ее целевому значению хц; t1, t2, t3 - временные границы участков траектории; tц - момент времени изменения целевой координаты траектории хц от значения хц.old.
Устройство, реализующее способ формирования траектории (фиг. 1), содержит задатчик целевой координаты (ЗЦК) 1, первый выход которого соединен с первым входом первого вычислителя рассогласования (ВР1) 2. Выход первого вычислителя рассогласования 2 соединен с входом первого релейного регулятора (РР1) 3, выход которого соединен с первым входом второго вычислителя рассогласования (ВР2) 4, Выход второго вычислителя рассогласования 4 соединен с входом второго релейного регулятора (РР2) 5, выход которого соединен с первым входом первого интегрального регулятора (ИР1) 6. Первый выход первого интегрального регулятора 6 соединен со вторым входом второго вычислителя рассогласования 4, второй выход первого интегрального регулятора 6 соединен с первым входом функционального преобразователя (ФП) 7, а третий выход первого интегрального регулятора 6 соединен с первым входом второго интегрального регулятора (ИР2) 8. Первый выход второго интегрального регулятора 8 соединен с первым входом сумматора (С) 9, второй вход которого соединен с выходом функционального преобразователя 7. Второй выход второго интегрального регулятора 8 соединен с первым входом логического блока управления (ЛБУ) 10, второй вход которого соединен с первым выходом сумматора 9, а третий его вход соединен со вторым выходом задатчика целевой координаты 1. Второй выход сумматора 9 соединен со вторым входом первого вычислителя рассогласования 2. Первый выход логического блока управления 10 соединен со вторым входом второго интегрального регулятора 8, а второй его выход соединен со вторым входом функционального преобразователя 7. Третий выход логического блока управления 10 соединен со вторым входом первого интегрального регулятора 6, а четвертый его выход соединен с третьим входом второго интегрального регулятора 8.
Задатчик целевой координаты 1, первый вычислитель рассогласования 2, первый релейный регулятор 3, второй вычислитель рассогласования 4, второй релейный регулятор 5, первый релейный регулятор 6, функциональный преобразователь 7, второй интегральный регулятор 8, сумматор 9 и логический блок управления 10 могут быть реализованы на базе программно-аппаратных средств вычислительной техники.
Диаграммы, показанные на фиг. 2, иллюстрируют достижение заявленного технического результата при осуществлении предложенного способа формирования траектории.
Реализация предложенным устройством предлагаемого способа формирования траектории осуществляется следующим образом.
Задатчик целевой координаты траектории 1 задает целевую координату хц таким образом, чтобы осуществить перемещение из начальной точки траектории с координатой хн в точку с координатой хц. Сигналы на первом и втором его выходах равны целевой координате траектории хц.
Первый вычислитель рассогласования 2 осуществляет вычисление рассогласования целевой координаты и координаты обратной связи следующим образом:
Первый релейный регулятор 3 с характеристикой «вход - выход», показанной на фиг. 3, осуществляет формирование целевой величины первой производной траектории νц по релейному закону в зависимости от рассогласования Δх целевой координаты хц и координаты обратной связи, а также в зависимости от предельной величины первой производной траектории согласно следующему соотношению:

где sign - функция знака, вычисляемая в зависимости от Δх следующим образом:
Таким образом, направление целевой величины первой производной траектории νц совпадает с направлением рассогласования Δх целевой координаты хц и координаты обратной связи хос. Целевая величина первой производной траектории νц при ненулевой величине указанного рассогласования Δх по абсолютной величине равна предельной величине первой производной νпр, а при нулевой величине Δх целевая величина первой производной траектории νц равна нулю. Предельную величину первой производной νпр устанавливают заранее таким образом, чтобы обеспечить желаемую динамику формирования траектории.
Второй вычислитель рассогласования 4 осуществляет вычисление рассогласования Δν целевой величины первой производной траектории νц и текущей величины первой производной траектории ν:
Второй релейный регулятор 5 с характеристикой «вход - выход», показанной на фиг. 4, осуществляет формирование второй производной траектории а по релейному закону в зависимости от рассогласования Δν целевой величины первой производной траектории νц и текущей величины первой производной траектории ν, а также в зависимости от предельной величины второй производной траектории апр согласно следующему соотношению:

где sign - функция знака, которая определяется в зависимости от Δν аналогично (3).
Таким образом, направление второй производной траектории νц совпадает с направлением рассогласования Δν целевой величины первой производной траектории νц и текущей величины первой производной траектории ν. Величина второй производной траектории а при ненулевой величине указанного рассогласования Δν по абсолютной величине равна предельной величине второй производной апр, а при нулевой величине Δν величина второй производной траектории а равна нулю. Предельную величину второй производной апр устанавливают заранее таким образом, чтобы обеспечить желаемую динамику формирования траектории.
Первый интегральный регулятор 6, имеющий характеристику «вход - выход», показанную на фиг. 5, осуществляет интегрирование второй производной траектории а и ограничение ее интегрирования зависимости от предельной величины первой производной траектории νпр, а также в зависимости от логического сигнала согласно следующим соотношениям:
Таким образом, ограничивают интегрирование второй производной траектории а в зависимости от предельной величины первой производной траектории νпр и формируют текущую величину первой производной траектории ν, а также устанавливают величину первой производной траектории ν равной нулю. Сигналы на первом, втором и третьем выходах первого интегрального регулятора 6 равны между собой.
Функциональный преобразователь 7 с характеристикой «вход - выход», показанной на фиг. 6, в зависимости от текущей величины первой производной траектории ν, предельной величины второй производной траектории апр и направления первой производной траектории ν, а также в зависимости от логического сигнала  формируют задание тормозного пути согласно следующим соотношениям:
формируют задание тормозного пути согласно следующим соотношениям:

где sign - функция знака, которая зависимости от ν определяется аналогично (3).
Таким образом, формируют задание тормозного пути хт и устанавливают задание тормозного пути равным нулю.
Второй интегральный регулятор 8 осуществляет интегрирование текущей величины первой производной траектории ν в зависимости от логического сигнала  согласно следующим соотношениям:
согласно следующим соотношениям:

Таким образом, формируют текущую координату траектории х и устанавливают текущую координату траектории равной целевой координате траектории хц. Сигналы на первом и втором выходах второго интегрального регулятора 8 равны между собой.
Сумматор 9 вычисляет сумму текущей координаты траектории х и задания тормозного пути хт согласно следующему соотношению:
Таким образом, вычисляют координату обратной связи хос.
Логический блок управления 10 вычисляет начальную координату траектории хн, принимая в качестве таковой текущую координату траектории х при изменении целевой координаты траектории х согласно блок-схеме, показанной на фиг. 7.
Также логический блок управления 10 согласно блок-схеме, показанной на фиг. 8, в зависимости от целевой координаты траектории хц, начальной координаты траектории хн и координаты обратной связи хос детектирует принадлежность текущей координаты траектории х участку торможения траектории. Для этого использовано следующее условие:

где && - логическое «И»; || - логическое «ИЛИ».
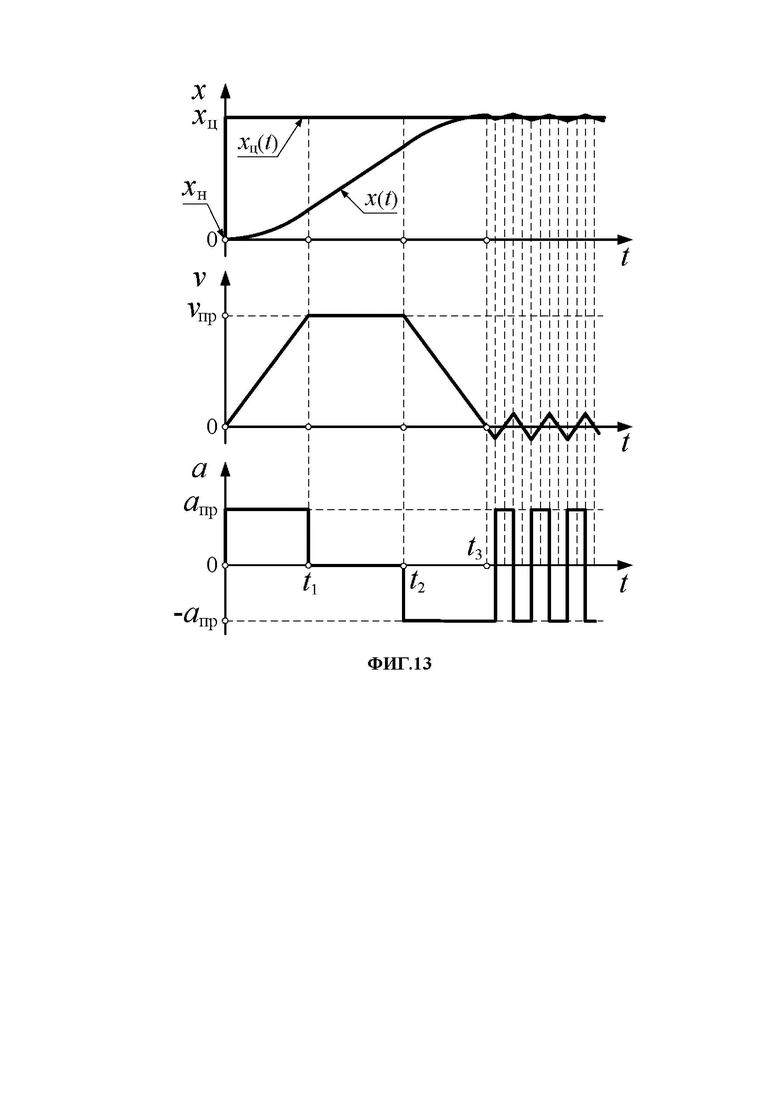
Условие (13) следует из диаграмм, показанных на фиг. 2. Согласно временным диаграммам, показанным на фиг. 2, при некоторой величине текущей координаты траектории х и соответствующих ей значениях хц, хн и хос условие (13) выполняется на участках разгона (0-t1) с постоянной величиной второй производной траектории а=апр, и движения (t1-t2) с постоянной величиной первой производной траектории ν=νпр, а также при t>t3. На участке торможения (t2-t3) с постоянной величиной второй производной траектории а=-апр условие (13) не выполняется для текущей координаты траектории х и соответствующих ей значениях хц, хн и хос.
Если при некоторой величине текущей координаты траектории х соответствующие ей значения хц, хн и хос не удовлетворяют (13), то эта текущая координата траектории находится на участке торможения.
Таким образом, детектируют участок торможения траектории в зависимости от целевой координаты траектории хц, начальной координаты траектории хн и координаты обратной связи хос.
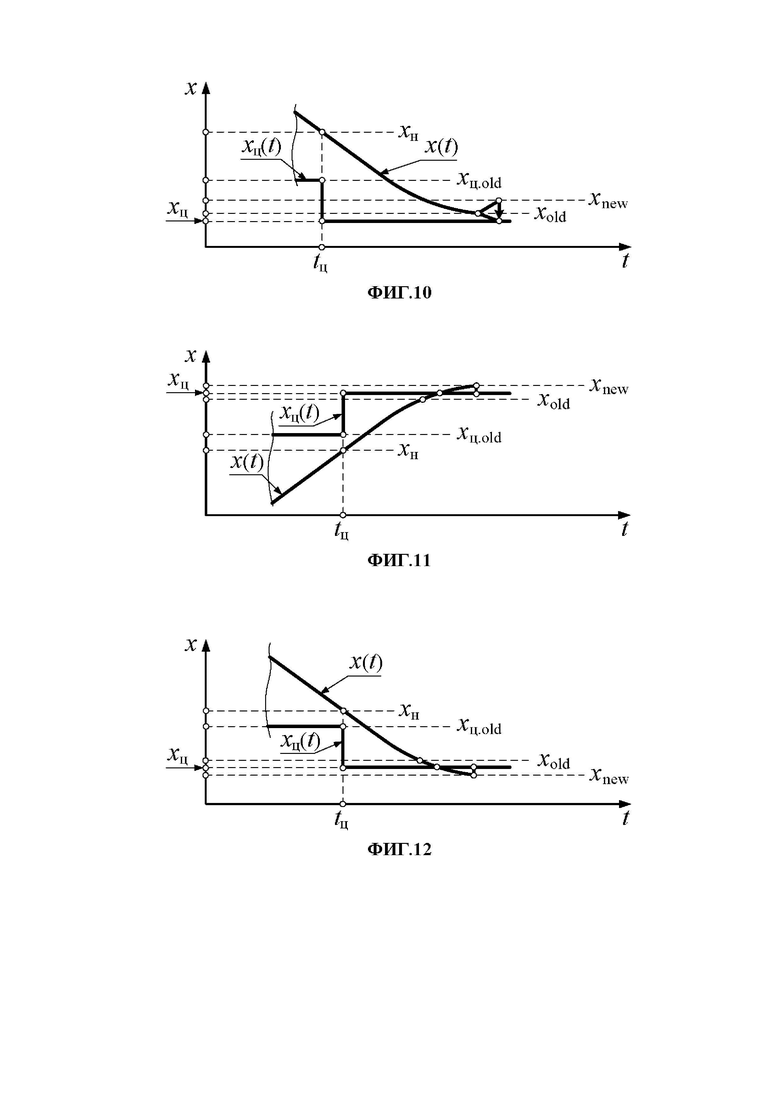
Затем согласно блок-схеме, показанной на фиг. 8, логический блок управления 10 на участке торможения траектории детектирует завершение формирования траектории, что иллюстрируется диаграммами, показанными на фиг. 9 - фиг. 12. При этом он детектирует формирование текущей координаты траектории х в обратном направлении по отношению к предыдущей координате траектории xold, как показано на фиг. 9 и фиг. 10. Иначе согласно диаграммам, показанным на фиг. 11 и фиг. 12, логический блок управления детектирует превышение текущей координатой траектории х целевой координаты траектории хц либо их равенство.
Условия завершения формирования траектории диаграммам, показанным на фиг. 9 - фиг. 12, описываются следующим соотношением:

Блок-схема логического блока управления 10, показанная на рис. 7, иллюстрирует вычисление xnew и xold для осуществления расчета по (14).
Если при некоторой величине текущей координаты траектории x соответствующие ей значения хц, хн, xnew и xold удовлетворяют (14), то траектория сформирована.
Таким образом, детектируют завершение формирования траектории в зависимости от начальной координаты траектории хн, текущей координаты траектории x и целевой координаты траектории хц.
Далее согласно блок-схеме, показанной на рис. 7, при детектировании завершения формирования траектории логический блок управления 10 устанавливает следующие значения логических сигналов на первом, втором и третьем выходах:

Если завершение формирования траектории не детектировано, то логический блок управления устанавливает следующие значения логических сигналов на первом, втором и третьем выходах:

При значениях логических сигналов (16) на первом, втором и третьем выходах логического блока управления 10, которые поданы согласно функциональной схеме, показанной на фиг. 1, на второй вход второго интегрального регулятора 8, второй вход функционального преобразователя 7 и второй вход первого интегрального регулятора 6 эти элементы функционируют в соответствии с (6), (8) и (10) соответственно.
Значения логических сигналов (15) на первом, втором и третьем выходах логического блока управления 10, поданные согласно функциональной схеме, показанной на фиг. 1, на второй вход второго интегрального регулятора 8, второй вход функционального преобразователя 7 и второй вход первого интегрального регулятора 6 в соответствии с (7), (9) и (11) приводят к установлению следующих значений х, хт и ν:

При этом для осуществления (17) через четвертый выход логического блока управления 10 на третий вход второго интегрального регулятора 8 передается целевая координата траектории хц. Кроме того, согласно блок-схеме, показанной на фиг. 8, при выполнении условия (14) помимо (17) выполняется следующее присвоение:
После выполнения (17) и (18) в устройстве для осуществления заявленного способа формирования траектории автоматически устанавливаются следующие величины:

Установление согласно (17), (18) и (19) приводит к уравновешиванию релейного закона (2) формирования целевой величины первой производной траектории νц и релейного закона (5) формирования второй производной траектории а, что препятствует возникновению автоколебательной составляющей в траектории при достижении текущей координатой х величины целевой координаты хц. После установления (19) величины х, хт, ν и хн остаются как в (17) и (18) независимо от значений логических сигналов  ,
,  и
и  на первом, втором и третьем выходах логического блока управления 10. Такое состояние, описываемое соотношениями (17), (18) и (19), устройства для осуществления заявленного способа формирования траектории автоматически поддерживается до изменения целевой координаты хц.
на первом, втором и третьем выходах логического блока управления 10. Такое состояние, описываемое соотношениями (17), (18) и (19), устройства для осуществления заявленного способа формирования траектории автоматически поддерживается до изменения целевой координаты хц.
Таким образом, устанавливают текущую координату траектории х равной целевой координате траектории хц, задание тормозного пути хт устанавливают равным нулю, первую производную траектории ν устанавливают равной нулю.
Ограничение интегрирования второй производной траектории а в зависимости от предельной величины первой производной траектории νпр, детектирование участка торможения траектории в зависимости от целевой координаты траектории хц, начальной координаты траектории хн и координаты обратной связи хос, детектирование завершение формирования траектории на участке торможения траектории, устанавливание текущей координаты траектории х равной целевой координате траектории хц, установление задания тормозного пути хт равным нулю, устанавливание первой производной траектории ν равной нулю в предлагаемом способе формирования траектории по сравнению со способом формирования траектории по прототипу позволяет устранить автоколебательную составляющую в траектории при достижении ее текущей координатой х величины целевой координаты хц.
Достижение заявленного технического результата иллюстрируется диаграммами формирования траектории согласно предлагаемому способу, показанными на фиг. 2, диаграммами формирования траектории согласно способу по прототипу, показанными на фиг. 13, а также диаграммами, показанными на фиг. 9 - фиг. 12. При формировании траектории согласно способу по прототипу при достижении ее текущей координатой х величины целевой координаты хц после момента времени t3 в траектории возникает автоколебательная составляющая, снижающая точность формирования траектории. Наличие этой автоколебательной составляющей вызвано наличием автоколебательной составляющей второй производной траектории а и автоколебательной составляющей первой производной траектории ν, показанными на фиг. 13 после момента времени t3 при достижении текущей координатой х величины целевой координаты хц. Это связано с формированием целевой величины первой производной траектории νц по релейному закону и с формированием второй производной траектории а по релейному закону, так как указанные релейные законы согласно способу по прототипу не могут быть уравновешен.
В предлагаемом способе ограничение интегрирования второй производной траектории а в зависимости от предельной величины первой производной траектории νпр, детектирование участка торможения траектории в зависимости от целевой координаты траектории хц, начальной координаты траектории хн и координаты обратной связи хос, детектирование завершение формирования траектории на участке торможения траектории, устанавливание текущей координаты траектории х равной целевой координате траектории хц, установление задания тормозного пути хт равным нулю, устанавливание первой производной траектории ν равной нулю согласно временным диаграммам, показанным на фиг. 9 - фиг. 12, позволяет своевременно выявить условия возникновения автоколебательной составляющей траектории при достижении текущей координатой х величины целевой координаты хц и уравновесить релейные законы формирования целевой величины первой производной траектории νц и формирования второй производной траектории а.
Как результат этого, на диаграммах формирования траектории, показанных на фиг. 13, автоколебательная составляющая траектории при достижении текущей координатой х величины целевой координаты хц отсутствует.
Использование изобретения позволяет повысить точность формирования траектории, устранив автоколебательную составляющую в траектории при достижении ее текущей координатой величины целевой координаты, в различных системах управления движением, в том числе, станочном оборудовании, роботах, манипуляторах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вентильно-индукторным электрическим двигателем | 2019 |
|
RU2716129C1 |
| Способ автоматического регулирования координат электропривода и устройство для его осуществления | 2017 |
|
RU2660183C1 |
| Способ настройки пропорционально-интегрально-дифференциального регулятора замкнутой динамической системы | 2019 |
|
RU2714372C1 |
| Способ регулирования координат взаимосвязанных электроприводов | 2017 |
|
RU2655723C1 |
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
| Многоканальный регулятор | 1987 |
|
SU1532895A1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| Пневматический регулятор с переменной структурой | 1978 |
|
SU748345A1 |
Группа изобретений относится к способу и устройству формирования траектории. Для формирования траектории задают целевую координату траектории, производят вычисления определенным образом над параметрами траектории, формируют задание тормозного пути, суммируют текущую координату траектории с заданием тормозного пути и вычисляют координату обратной связи, детектируют участок торможения траектории в зависимости от целевой координаты траектории, начальной координаты траектории и координаты обратной связи, детектируют завершение формирования траектории. Устройство содержит задатчик целевой координаты траектории, два вычислителя рассогласования, два релейных регулятора, функциональный преобразователь и сумматор, соединенные определенным образом. Обеспечивается повышение точности вычисления траектории. 2 н.п. ф-лы, 13 ил.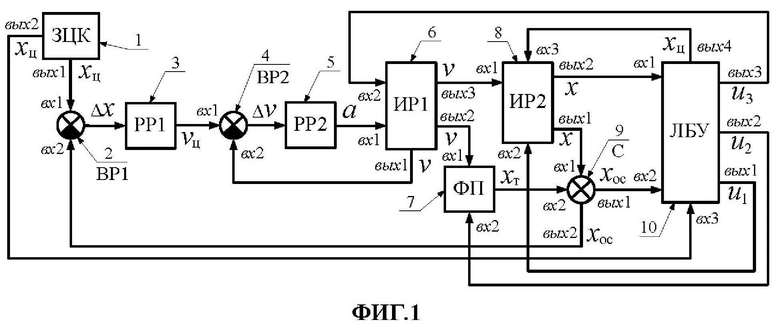
1. Способ формирования траектории, включающий задание целевой координаты траектории, вычисление рассогласования целевой координаты и координаты обратной связи, далее в зависимости от рассогласования целевой координаты и координаты обратной связи, а также в зависимости от предельной величины первой производной траектории формирование целевой величины первой производной траектории, затем вычисление рассогласования целевой величины первой производной траектории и текущей величины первой производной траектории, далее в зависимости от рассогласования целевой величины первой производной траектории и текущей величины первой производной траектории, а также в зависимости от предельной величины второй производной траектории формирование второй производной траектории, затем интегрирование второй производной траектории, отличающийся тем, что интегрирование второй производной траектории ограничивают в зависимости от предельной величины первой производной траектории и формируют текущую величину первой производной траектории, затем в зависимости от текущей величины первой производной траектории, предельной величины второй производной траектории и направления текущей первой производной траектории формируют задание тормозного пути, затем интегрируют текущую величину первой производной траектории и формируют текущую координату траектории, далее суммируют текущую координату траектории с заданием тормозного пути и вычисляют координату обратной связи, далее детектируют участок торможения траектории в зависимости от целевой координаты траектории, начальной координаты траектории и координаты обратной связи, затем на участке торможения траектории детектируют завершение формирования траектории, затем устанавливают текущую координату траектории равной целевой координате траектории, задание тормозного пути устанавливают равным нулю, первую производную траектории устанавливают равной нулю, причём предельную величину первой производной траектории и предельную величину второй производной траектории устанавливают заранее; целевую величину первой производной траектории формируют по релейному закону таким образом, что её направление совпадает с направлением рассогласования целевой координаты и координаты обратной связи, целевая величина первой производной траектории при ненулевой величине указанного рассогласования по абсолютной величине равна предельной величине первой производной, а при нулевой величине указанного рассогласования целевая величина первой производной траектории равна нулю; вторую производную траектории формируют по релейному закону таким образом, что его направление совпадает с направлением рассогласования целевой первой производной и текущей первой производной траектории, вторая производная траектории при ненулевой величине указанного рассогласования по абсолютной величине равна предельной величине второй производной, а при нулевой величине указанного рассогласования вторая производная траектории равна нулю; в качестве начальной координаты траектории принимают текущую координату траектории при изменении целевой координаты траектории; на участке торможения траектории детектируют завершение формирования траектории таким образом, что детектируют формирование текущей координаты траектории в обратном направлении по отношению к предыдущей координате траектории, иначе в зависимости от начальной координаты траектории, текущей координаты траектории и целевой координаты траектории детектируют превышение текущей координатой траектории целевой координаты траектории либо их равенство.
2. Устройство для осуществления способа по п.1, содержащее задатчик целевой координаты траектории, первый вычислитель рассогласования, первый релейный регулятор, второй вычислитель рассогласования, второй релейный регулятор, функциональный преобразователь и сумматор, при этом выход первого вычислителя рассогласования соединён с входом первого релейного регулятора, выход первого релейного регулятора соединён с первым входом второго вычислителя рассогласования, выход которого соединён с входом второго релейного регулятора, второй вход сумматора соединён с выходом функционального преобразователя, отличающееся тем, что оно снабжено первым интегральным регулятором, вторым интегральным регулятором и логическим блоком управления, при этом первый выход задатчика целевой координаты соединён с первым входом первого вычислителя рассогласования, выход второго релейного регулятора соединён с первым входом первого интегрального регулятора; первый выход первого интегрального регулятора соединён со вторым входом второго вычислителя рассогласования, второй выход первого интегрального регулятора соединён с первым входом функционального преобразователя, а третий выход первого интегрального регулятора соединён с первым входом второго интегрального регулятора; первый выход второго интегрального регулятора соединён с первым входом сумматора, второй выход второго интегрального регулятора соединён с первым входом логического блока управления, второй вход которого соединён с первым выходом сумматора, а третий его вход соединён со вторым выходом задатчика целевой координаты; второй выход сумматора соединён со вторым входом первого вычислителя рассогласования; первый выход логического блока управления соединён со вторым входом второго интегрального регулятора, а второй его выход соединён со вторым входом функционального преобразователя; третий выход логического блока управления соединён со вторым входом первого интегрального регулятора, а четвёртый его выход соединён с третьим входом второго интегрального регулятора.
| Система позиционного управления электроприводом | 1987 |
|
SU1509826A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2648556C2 |
| СПОСОБ УСТАНОВЛЕНИЯ ПЛАНОВОЙ ТРАЕКТОРИИ ПОЛЕТА ТРАНСПОРТНОГО СРЕДСТВА ВОЗЛЕ ЦЕЛИ (ВАРИАНТЫ), ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2017 |
|
RU2687008C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ШАРНИРНО СОЕДИНЕННОГО ЗАГРУЗОЧНОГО РУКАВА ДЛЯ ТЕКУЧЕЙ СРЕДЫ, СПОСОБ СБОРА И ВЫЧИСЛЕНИЯ ДАННЫХ И УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ТАКОГО СПОСОБА, А ТАКЖЕ ШАРНИРНО СОЕДИНЕННЫЙ ЗАГРУЗОЧНЫЙ РУКАВ ДЛЯ ТЕКУЧЕЙ СРЕДЫ | 2017 |
|
RU2722125C1 |
| DE 19854011 A1, 25.05.2000 | |||
| US 20110060462 A1, 10.03.2011. | |||

