Изобретение относится к вооружению и военной технике Сухопутных войск, Береговых войск Военно-Морского Флота, Воздушно-десантных войск, специальных, разведывательных, контртеррористических подразделений Министерства обороны, Федеральной службы безопасности, Федеральной службы войск национальной гвардии, а точнее к вспомогательным средствам ведения разведки местности и боя, корректировки и целеуказания, мониторинга и объективного контроля.
Эффект Коанда - это явление, которое впервые было обнаружено в 1910 году математиком и инженером по имени Анри Коанда.
В качестве прототипа выбран Летательный аппарат вертикального взлета и посадки [7] дисковидной компоновки с центробежным вентилятором и центростремительным направлением расширения потока реактивной струи, отличающийся тем, что его силовой агрегат выполнен комбинированным, содержащим два привода и вентиляторы противоположного вращения, один из которых, центробежный, обеспечивает движение потока с его центростремительным расширением на выходе из внутреннего пространства наружного дисковидного корпуса, а другой, осевой в кольце, прикрепленном коаксиально с зазором к внешней поверхности наружного дисковидного корпуса, нагнетает поток с изменением направления от осевого к радиальному вдоль поверхности «Коанда», причем наружный дисковидный корпус содержит размещенный эквидистантно его внутренней поверхности удобообтекаемый модуль оборудования и целевой нагрузки, состоящий из обшивки двойной кривизны, меридиональных и экваториальных элементов каркаса, с прикрепленными к ним узлами крепления опор шасси, оборудования и целевой нагрузки, а изменение величины подъемной силы, управление и перемещения аппарата в пространстве осуществляются отклонениями дополнительного кольцевого крыла, обдуваемого потоком воздуха реактивной струи, причем развороты аппарата вокруг вертикальной оси обеспечивают выдвижные из модуля оборудования и целевой нагрузки аэродинамические управляющие поверхности.
Летающая платформа, применяемая в Способе целеуказания с использованием персональной универсальной летающей платформы на эффекте Коанда с бортовой управляемой видео/фотокамерой отличается тем, что элементы управления аппаратом вынесены наружу, а необходимая полезная нагрузка находится с внутренней стороны корпуса (фюзеляжа). Такой тип беспилотного летательного аппарата на эффекте Коанда с вертикальным взлетом, не имеет каких-либо внешних подвижных частей. Закрытый вращающийся винт в центре машины предназначен для создания потока воздуха вокруг нее. Но в отличие от целого ряда аппаратов такого типа, этот поток не создает реактивной подъемной силы. Вращающийся винт в этом случае не действует по принципу вертолетного винта, а в данном случае струя прилипает к закругленной внешней поверхности корпуса (фюзеляжа), при этом на нем создается разряжение, увлекающее аппарат вверх. Раздельное регулирование потоков воздуха у разных секторов позволяет ей управлять аппаратом и менять курс [1-4].
Известно изобретение Система загоризонтного целеуказания и видеонаблюдения, проектируемых на основе запускаемых одноразовых расходуемых носителей, а также таких аналогов, как система разведки местности (см. патент ЕР 2372297, F42B 12/36, 2011), выполненную на основе запускаемого артиллерийского снаряда, несущего видеокамеру и передатчик видеоизображений с антенной, а также средство спутниковой навигационной системы GPS, и приемника в наземном командном пункте с выводом сигналов полученных изображений и информации GPS на блок обработки и дисплея компьютера с корректировкой изменений в изображениях в связи с вращением снаряда.
В качестве прототипа предлагаемого способа выбрана система загоризонтного целеуказания и видеонаблюдения (см. патент, RU 2578494 С1, US 2012043411, B64D 17/80, F42B 10/14, F42B 15/08, H04N 7/18, 2012), состоящая из запускаемого одноразового расходуемого носителя (реактивного снаряда), механически соединенного с парашютом и содержащего установленные в корпусе носителя камеру наблюдения и электронные узлы, обеспечивающие с помощью передатчика и датчика глобальной навигационной системы видеонаблюдение и координатную привязку фиксируемых изображений, и наземного комплекса приема и обработки видовой и координатной информации, поступающей с указанного расходуемого носителя.
Общим недостатком для систем приведенного типа является недостаточно высокая эффективность целеуказания, заключающаяся в условиях одновременного применения нескольких однотипных систем, создающих друг для друга помехи и постоянную утрату самого источника целеуказания после применения.
Недостатком прототипа является недостаточно высокая точность целеуказания, низкая маневренность в условиях изменения обстановки и отсутствие возможности сопровождения цели, большая вероятность утраты самого носителя и информации, которая находится у него на борту.
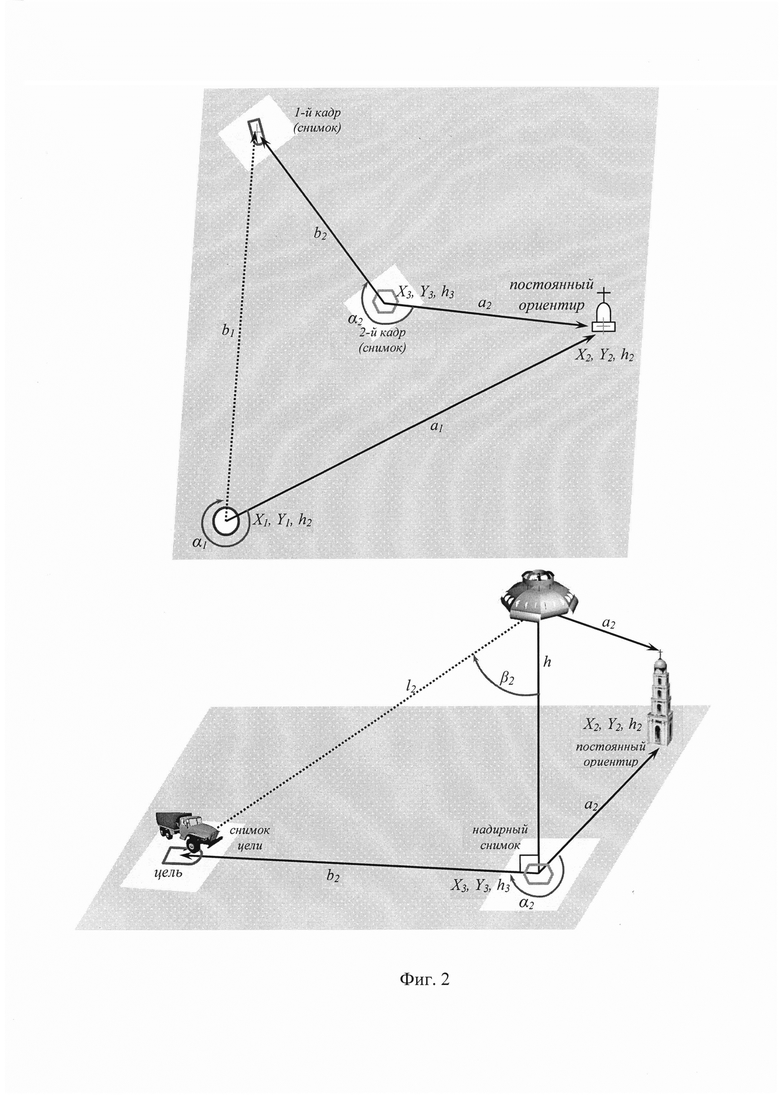
Способ целеуказания с использованием персональной универсальной летающей платформы (УЛП) на эффекте Коанда с бортовой управляемой видео/фотокамерой, отличается тем, что в качестве носителя аппаратуры целеуказания используется летающий аппарат, который слабо подвержен внешнему механическому воздействию, полет которого основан на эффекте Коанда, использование данного аппарата для целеуказания основывается на вычислении координат, направления и дальности до визируемой цели относительно направления на ориентир с известными координатами, направление и координаты которого устанавливается до выполнения полета в памяти автопилота бортового модуля навигации (БМН) и не меняются в процессе всего полета, постоянное удержание данного направления выполняется автопилотом БМН, что совместно с использованием данных с датчика, считывающего положение бортовой управляемой видео/фотокамеры, центр фотографирования которой наводится на цель с одновременной кратковременной подсветкой лазерным лучом во время фотографирования точки и момента текущего положения УЛП над поверхностью полета, что обеспечивает получение дополнительных данных оператором и БМН для точного расчета при целеуказании и в конечном итоге определении координат, направления и дальности цели от орудия координаты позиции которого также участвуют в расчетах (фиг. 2, 3).
В качестве алгоритмов для расчета координат цели, угол и дальность до нее относительно орудия, для которого выполняется целеуказание, служат следующие зависимости (1, 2) (фиг. 2):
а также алгоритмы прямой геодезической задачи (заключается в том, что по известным координатам точки, вычисляются координаты другой точки, для чего необходимо знать длину линии между этими точками и ориентирный угол этой линии), обратной геодезической задачи (заключается в том, что известным координатам двух точек вычисляют длину линии между этими точками и дирекционный угол этой линии), задача Потенота (или обратная геодезическая засечка - одна из классических математических задач определения точки на местности по трем ориентирам с известными координатами).
УЛП исполнена в закрытой для полезной нагрузки форме и не имеет никаких внешних незащищенных подвижных частей, за исключением мелких килевых крыльев управления и малоподвижных сопел управления воздушным потоком, которые способны выдержать большую нагрузку, поэтому способна летать в горной и лесистой местности, в местах с растительностью и линий электропередач, в плотных городских застройках, внутри помещений, шахт, туннелей, пещер, при этом, в случае сталкивания с препятствием на пути полета, происходит автоматический отлет на безопасное расстояние для дальнейшего продолжения движения далее.
Возможно практическое использование как небольших УЛП идеально подходящих для ведения разведки, так и крупных моделей, которые могут выполнять транспортные доставки (например, доставлять боеприпасы и медикаменты и т.д), при этом ввиду полной защищенности и скрытного размещения механизмов полета и управления системы возможен легкобронированный вариант исполнения УЛП.
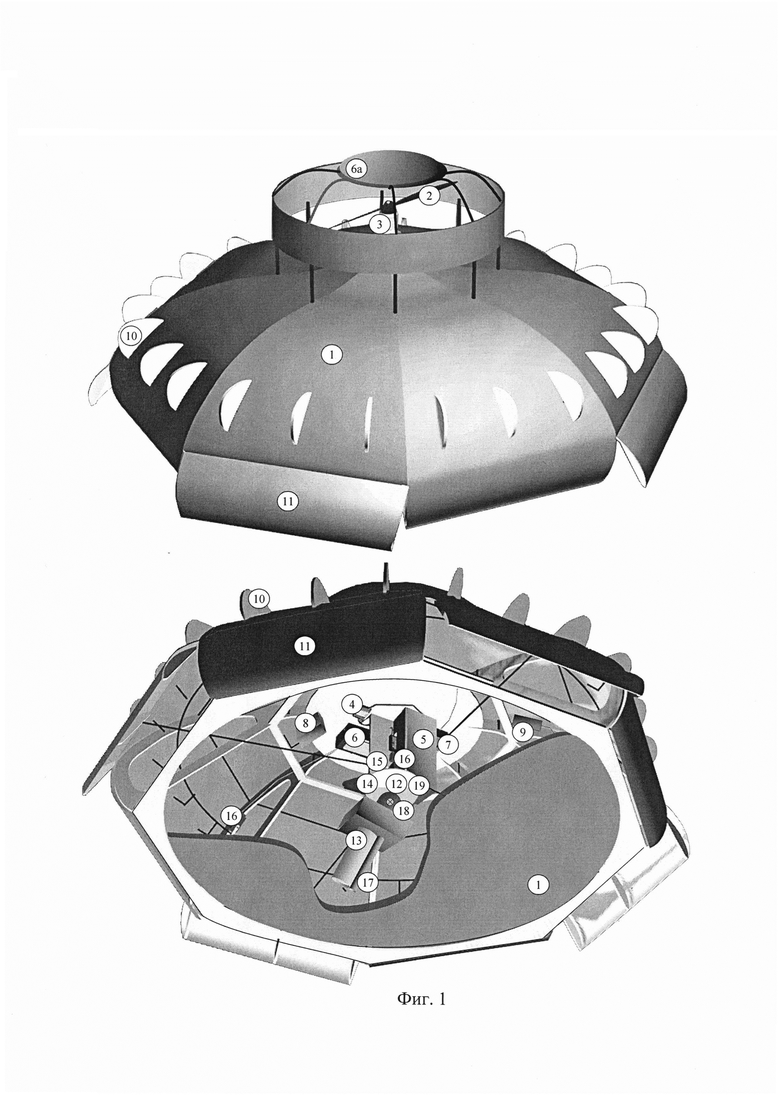
Конструкция персональной универсальной летающей платформы на эффекте Коанда с бортовой управляемой видео/фотокамерой (фиг. 1) включает:
1) фюзеляж (корпус УЛП) из радиопрозрачного материала (возможет легкобронированный вариант) - 1 шт;
2) несущий винт - 1 шт;
3) электромотор - 1 шт;
4) контроллер управления двигателем - 1 шт;
5) элемент питания (аккумулятор) - 1 шт;
6) бортовой навигационный модуль (БНМ), состоящий из: спутникового приемника (6а) (находится над винтом УЛП), гироскопа, магнитометра, акселерометра, барометра, контроллера управления БНМ - 1 шт;
7) радиоприемник непосредственного управления УНП - 1 шт;
8) радио передатчик видео/фото сигнала - 1 шт;
9) радио передатчик телеметрической информации с борта УЛП (состав телеметрической информации: собственные координаты, координаты, направление и расстояние до установленного ориентира, направление и расстояние от основной/запасной/резервной позиции орудия до цели, расчетные координаты цели) - 1 шт;
10) килевые крылья направления, находящиеся на фюзеляже, которые управляют поворотом (вращением) УЛП относительно вертикальной оси - 1 шт;
11) сопла, которые обеспечивают движение УЛП относительно горизонтальной плоскости полета и изменение курса - 1 шт;
12) счетчик вертикального угла поворота видео/фото камеры шаговым двигателем - 1 шт;
13) видео/фото камера - 1 шт;
14) шаговый двигатель, управляющий видео/фото камерой - 1 шт;
15) шина крепления видео/фото камеры на фюзеляж (корпус) УЛП - 1 шт;
16) серводвигатель (для управления килевыми крыльями (один) и соплами (четыре) - 5 шт;
17) лазерный указатель-подсведка, совмещенная с линией направления фото/видеокамеры совмещенная с центральной точкой снимка - центром фотографирования - 1 шт;
18) поворотный механизм камеры с шаговым двигателем и контроллером шагового двигателя - 1 шт.
19) считывающий датчик угла поворота камеры от надирного (вертикального, перпендикулярного поверхности полета) луча - 1 шт.
Состав наземного оборудования:
20) приемник телеметрической информации с борта (координаты, направление на установленный ориентир, вычисленное направление орудия до цели по установленному ориентиру, дальность до цели и тд.) - 1 шт.
21) передатчик для управления УЛП - 1 шт;
22) радиоприемник сигнала фото/видео камеры - 1 шт;
23) сенсорный монитор, оборудованный сенсорным управлением - 1 шт;
24) установленный комплекс расчетных задач (ОГЗ, ПГЗ, Задача Патенота и т.д.) - 1 шт.
Дополнительно к видео/фото сигналу на монитор оператора поступает телеметрия, состав данных которой включает:
1) координаты положения цели/УЛП, например: «Х=7534949.33, Y=4242806.43, h=850.3»
2) направление до цели от орудия - угол от назначенного ориентира до цели (по ходу часовой стрелке), например «189°03'02.05ʺ», предусмотрен вариант целеуказания в удобной системе координат, высот и угловых величинах, таких как, например, деления угломера;
3) расстояние до цели от орудия, например: «5356 м».
Способ целеуказания с использованием персональной универсальной летающей платформы на эффекте Коанда с бортовой управляемой видео/фотокамерой заключается в проведении следующих операций:
1) по каналу связи фото/видео оператором опознается цель, производится ее распознавание/идентификация;
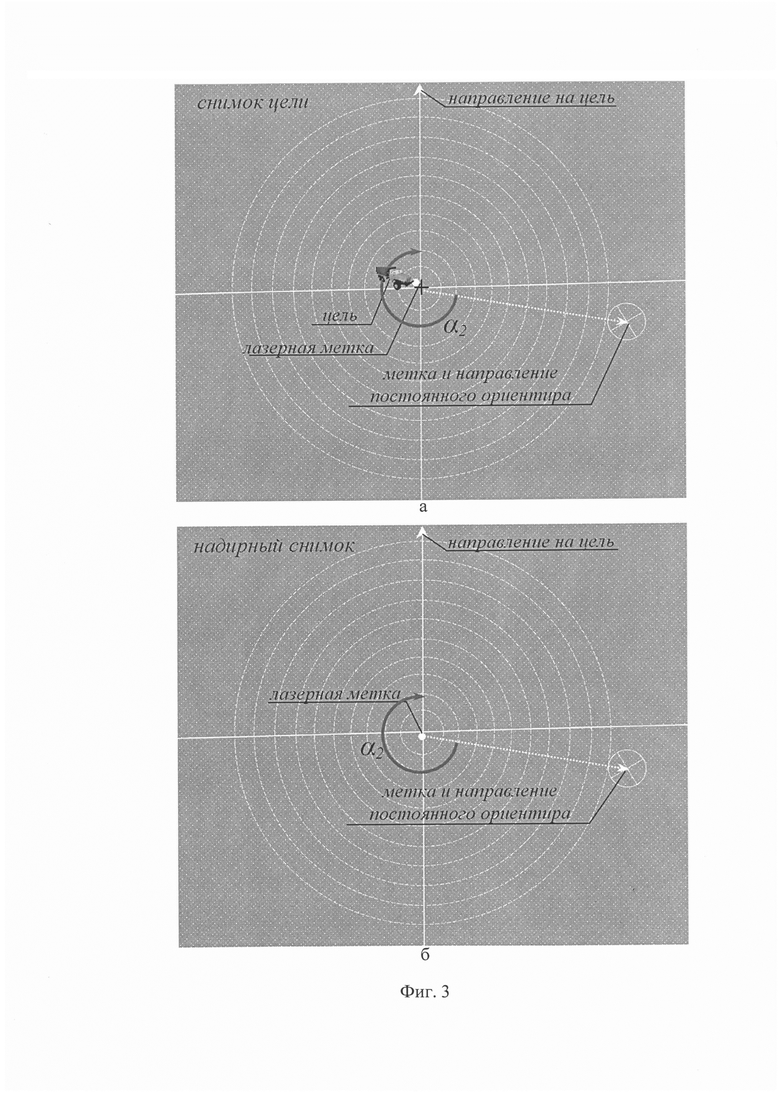
2) выполняется фотографирование цели с одновременной кратковременной подсветкой лазерным лучом на общем фоне (для последующей привязки к местным предметам по снимку или карте оператором) далее производится последующее автоматическое фотографирование планового фотоснимка в надир (т.е. фотографирование вниз относительно центра положения УЛП - перпендикулярно линии горизонта), также с лазерной кратковременной подсветкой (автоматический расчет выполняется по умолчанию относительно центров снимков - фиг. 2, 3);
3) оба снимка поступают оператору и служат средством уточнения уже рассчитанных БНМ координат/направления/дальности цели;
4) в случае, когда рассчитанные БНМ автоматически координаты/ направление/дальность цели, удовлетворяют требованиям точности для огневых средств, то выполняется целеуказание, если полученная точность не удовлетворяет требованиям огневых средств, то выполняются действия описанные в пункте 5;
5) отработав действия описанные в пункте 4, оператор производит уточнение положения УЛП и цели по поступившей паре снимков получение которых соответствует пункту 2 (фиг. 3), далее по циркулярным шкалам снимков определяются отклонения от центров фотографирования с лазерным следом на полученных снимках;
6) после уточнения положения цели по п. 5 оператор сообщает устно или с использованием средств связи окончательные координаты/направление/ дальность цели или производит корректировку ранее поданных данных целеуказания поправками.
Ожидаемый эффект: решение задачи целеуказания и корректировки при выполнении боевых задач специальных подразделений, поиск и обнаружение местоположения терпящих бедствие на значительных расстояниях.
Техническим результатом использования способа целеуказания с использованием персональной универсальной летающей платформы на эффекте Коанда с бортовой управляемой видео/фотокамерой, является дистанционное обеспечение видео/фото контроля за частью местности, на территории которой находится цель, ее обнаружение/идентификация, сопровождение, высокоточное целеуказание, управление огнем, а также выполнение мероприятий по дистанционному поиску и обнаружению местоположения терпящих бедствие в труднодоступных местах.
Технический результат изобретения выражается в применении изобретения при:
- обнаружении, идентификации, видео/фото фиксации и отображении целей;
- выполнении, в режиме близкому к реальному, вычисления и уточнения координат цели с ее видео/фотофиксацией, определение азимутов направлений на них, их дальности, высоты их расположения, в том числе, в условиях отсутствия прямой видимости относительно оператора или установленного ориентира;
- выполнении целеуказаний в процессе разведки или непосредственного ведения боя;
- получении данных для точных ударов авиации, огня артиллерии, при применении штатных огневых средств подразделений по статичным или динамичным объектам (целям);
- отображении и удержание видеотрансляции цели, создание условий быстрого целераспределения и целеуказания.
- интеграции и использовании в целях управления и целеуказания с комплексом разведки, управления и связи «Стрелец» для его дополнения [6].
Список использованной литературы
2. Семиненко А.С, Шумский А.С., Долгаль А.В. Применение эффекта Коанда. Часть 1. Авиация // IV Международная студенческая электронная научная конференция «Студенческий научный форум».
3. Ганич Г.А., Гущина Н.А., Жулев Ю.Г. Эффект Коанда при выдуве струй из прямоугольных сопл под углом к плоской поверхности // Ученые записки ЦАГИ. Том XXV, 1994 г.
4. Parks Е.К. and Peterson R.Е. Analysis of a Coande type flow // AJAA J. 1968. Vol. 6, №1.
5. Newman В.E. The deflexion of plane jets by boundary layer Coande effect. Boundary layer and flow control / Ed. by Lachmen G.V. // Pergamono Press. 1961. Vol. 1
6. Комплекс разведки, управления и связи (КРУС) «Стрелец» (изделие 83 т215), для комплекса боевой экипировки военнослужащих «Ратник». https://trcvr.ru/2015/12/19/kompleks-krus-strelec-dlja-boevoi-jeki/.
7. Воронков, Ю.С. Патент на изобретение RU 2518143 С2, Российская Федерация, Летательный аппарат вертикального взлета и посадки [Текст] / Воронков Юрий Сергеевич, Воронков Олег Юрьевич, Ушаков Андрей Петрович, заявитель и правообладатель: Воронков Юрий Сергеевич, заявл. 2012.09.04; опубл. 2014.10.06 бюл. 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЗДУШНОЙ РАЗВЕДКИ НАЗЕМНЫХ (НАДВОДНЫХ) ОБЪЕКТОВ С ЦЕЛЬЮ ТОПОГЕОДЕЗИЧЕСКОГО, МЕТЕОРОЛОГИЧЕСКОГО И ДРУГИХ ВИДОВ ОБЕСПЕЧЕНИЯ ПУСКОВ (СБРОСОВ) УПРАВЛЯЕМЫХ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННЫХ ГОЛОВОК САМОНАВЕДЕНИЯ | 2020 |
|
RU2771965C1 |
| СПОСОБ ОПТИМИЗАЦИИ ТРАЕКТОРИИ ПОЛЁТА ПОДВИЖНОГО ОБЪЕКТА ПРИ ПРОВЕДЕНИИ АЭРОГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2592042C1 |
| Система аэромониторинга залежек морских животных | 2015 |
|
RU2609728C1 |
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| СПОСОБ СКОРОСТНОЙ ВОЗДУШНОЙ РАЗВЕДКИ | 2009 |
|
RU2395782C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2015 |
|
RU2584210C1 |
| СИСТЕМА РАЗВЕДКИ НАЗЕМНЫХ ОБЪЕКТОВ И ЦЕЛЕУКАЗАНИЯ | 2016 |
|
RU2625691C1 |
| ФОТОГРАММЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕВЫШЕНИЙ ПОДВИЖНОГО ОБЪЕКТА НАД ЗЕМНОЙ ПОВЕРХНОСТЬЮ И УСТРОЙСТВО ДЛЯ АЭРОГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2012 |
|
RU2508525C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
Изобретение относится к вооружению и военной технике, а точнее к вспомогательным средствам ведения разведки местности и боя, корректировки и целеуказания, мониторинга и объективного контроля. В качестве носителя аппаратуры целеуказания используется летающий аппарат, полет которого основан на эффекте Коанда. Использование аппарата для целеуказания основывается на вычислении координат, направления и дальности до визируемой цели относительно направления на ориентир с известными координатами, направление и координаты которого устанавливаются до выполнения полета в памяти автопилота бортового модуля навигации (БМН) и не меняются в процессе всего полета. Постоянное удержание данного направления выполняется автопилотом БМН, что совместно с использованием данных с датчика, считывающего положение бортовой управляемой видео/фотокамеры, центр фотографирования которой наводится на цель с одновременной кратковременной подсветкой лазерным лучом во время фотографирования точки и момента текущего положения летающей платформы над поверхностью полета. Повышается эффективность и точность. 3 ил.
Способ целеуказания с использованием персональной универсальной летающей платформы (УЛП) на эффекте Коанда с бортовой управляемой видео/фотокамерой, отличающийся тем, что в качестве носителя аппаратуры целеуказания используется летающий аппарат, полет которого основан на эффекте Коанда, использование данного аппарата для целеуказания основывается на вычислении координат, направления и дальности до визируемой цели относительно направления на ориентир с известными координатами, направление и координаты которого устанавливаются до выполнения полета в памяти автопилота бортового модуля навигации (БМН) и не меняются в процессе всего полета, постоянное удержание данного направления выполняется автопилотом БМН, что совместно с использованием считывающего датчика положения бортовой управляемой видео/фотокамеры, центр фотографирования которой совпадает с центром объектива/снимка, который наводится на цель с одновременной кратковременной подсветкой лазерным лучом, конструктивно совмещенным с линией визирования видео/фотокамеры, далее производится последующее автоматическое плановое фотографирование в надир момента текущего положения УЛП над поверхностью полета, что обеспечивает получение дополнительных данных БМН и оператору для точного расчета при целеуказании и, в конечном итоге, определении координат, направления и дальности цели от орудия, для которого выполняется целеуказание.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2012 |
|
RU2518143C2 |
| СИСТЕМА ЗАГОРИЗОНТНОГО ЦЕЛЕУКАЗАНИЯ И ВИДЕОНАБЛЮДЕНИЯ | 2014 |
|
RU2578494C1 |
| US 20120043411 A1, 23.02.2012 | |||
| СПОСОБ ОСВЕТЛЕНИЯ И УТИЛИЗАЦИИ ПРОМЫВНЫХ ВОД ФИЛЬТРОВАЛЬНЫХ СООРУЖЕНИЙ СТАНЦИЙ ВОДОПОДГОТОВКИ | 2008 |
|
RU2372297C1 |
| СПОСОБ КОРРЕКТИРОВКИ ОГНЯ АРТИЛЛЕРИИ С ИСПОЛЬЗОВАНИЕМ МУЛЬТИКОПТЕРА | 2020 |
|
RU2726460C1 |
| Способ пристрелки цели с использованием специального реактивного снаряда | 2019 |
|
RU2715466C1 |

