Изобретение относится к области управления воздушным движением и может применяться для контроля воздушной обстановки, обнаружения воздушных судов и метеорологических объектов.
Основной задачей обзорных радиолокационных станций (РЛС), контролирующих воздушную обстановку в зоне своего действия, является достоверное обнаружение воздушных судов (ВС), точное измерение их координат и параметров движения. Одним из факторов, препятствующих выполнению этой задачи, является наличие в зоне действия РЛС различных метеорологических объектов (МО). Их воздействие на качество работы РЛС двоякое. С одной стороны, отражение зондирующих сигналов от МО является пассивной помехой, на фоне которой производится обнаружение и измерение параметров движения ВС. С другой стороны, МО, находящиеся между РЛС и ВС, выполняют роль частично прозрачного экрана, снижая дальность действии РЛС. В обоих случаях для улучшения характеристик РЛС при наличии МО требуется принятие мер по снижению влияния МО на работу РЛС.
Известен способ подавления отраженных от МО сигналов, основанный на излучении зондирующих сигналов с круговой поляризацией [1: с. 76, 2: с. 487-489, 3: с. 143, 4: с. 112]. Т.к. при отражении от большинства типов МО направление вращения вектора напряженности электрического поля меняется на противоположное, отраженные от МО сигналы проникают в приемный тракт РЛС через ту же антенну в существенно ослабленном виде. В литературе [3: с. 143] приводятся данные об ослаблении отраженных от МО сигналов на величину порядка 20 дБ. Однако, использование круговой поляризации снижает мощность отраженных от ВС сигналов на величину от 3дБ [1: с. 76] до 8 дБ [19: с. 411-412]. Таким образом, реальный выигрыш в отношении сигнал/помеха при использовании этого способа составляет 12-17 дБ.
В качестве прототипа изобретения взят способ, изложенный в [4: с. 112], в котором круговая поляризация излучаемого сигнала используется с целью ослабления отражений от МО путем приема отраженных от воздушных объектов сигналов той же антенной с круговой поляризацией с тем же направлениям вращения вектора напряженности электрического поля.
Недостатком такого способа подавления отраженных от МО сигналов является потеря информации о координатах МО, их границах, интенсивностях и направлении движения.
Технической проблемой, решение которой обеспечивается при осуществлении изобретения, является создание способа получения информации о метеорологических объектах в первичных радиолокаторах без потери информации о координатах МО, их границах, интенсивностях и направлении движения.
Технический результат, обеспечиваемый изобретением: повышение достоверности обнаружения и измерения параметров движения воздушных судов и метеорологических объектов.
Для достижения технического результата в способе получения информации о метеорологических объектах в первичных радиолокаторах, заключающемся в использовании основной антенны радиолокатора с круговой поляризацией при излучении зондирующих сигналов, приеме и обработке сигналов, отраженных от воздушных судов, неподвижных местных предметов и метеорологических объектов, отличающийся тем, что используют дополнительный канал приема и обработки отраженных сигналов с дополнительной антенной с линейной, эллиптической или круговой поляризацией с направлением вращения вектора напряженности электрического поля, противоположным направлению вращения вектора напряженности электрического поля основной антенны, форму диаграммы направленности дополнительной антенны выбирают из условия ее пересечения с диаграммой направленности основной антенны в максимально узком секторе пространственных углов, сигнал, принятый дополнительной антенной, считают сигналом, отраженным от воздушных судов, местных предметов и метеорологических объектов, находящихся в зоне пересечения главных лепестков основной и дополнительной антенн, после каждого цикла обзора основной антенны изменяют положение диаграммы направленности дополнительной антенны так, чтобы за несколько циклов обзора основной антенны область пересечения диаграмм направленности антенн покрыла весь рабочий сектор углов радиолокатора.
Также для достижения технического результата в способе получения информации о метеорологических объектах в первичных радиолокаторах в случае, когда диаграмму направленности дополнительной антенны выбирают совпадающей по форме и направлению с диаграммой направленности основной антенны при любом ее положении в процессе сканирования рабочего сектора углов радиолокатора, оценку координат метеорологических объектов и воздушных судов в каждом канале производят как в радиолокаторах с одним лучом.
Способ получения информации о метеорологических объектах в первичных радиолокаторах с двумя каналами приема в радиолокаторе обеспечивает:
-в канале с совпадающим направлением вращения вектора напряженности электрического поля повышение достоверности обнаружения и измерения параметров движения воздушных судов за счет снижения в этом канале мощности отраженных от МО сигналов;
-в приемном канале с круговой или эллиптической поляризацией с противоположным направлением вращения вектора напряженности электрического плоя, либо с линейной поляризацией повышение достоверности обнаружения и измерения параметров МО;
-при совместном использовании данных обоих каналов дополнительное повышение достоверности обнаружения и измерения параметров движения воздушных судов.
Сущность изобретения поясняется рисунками:
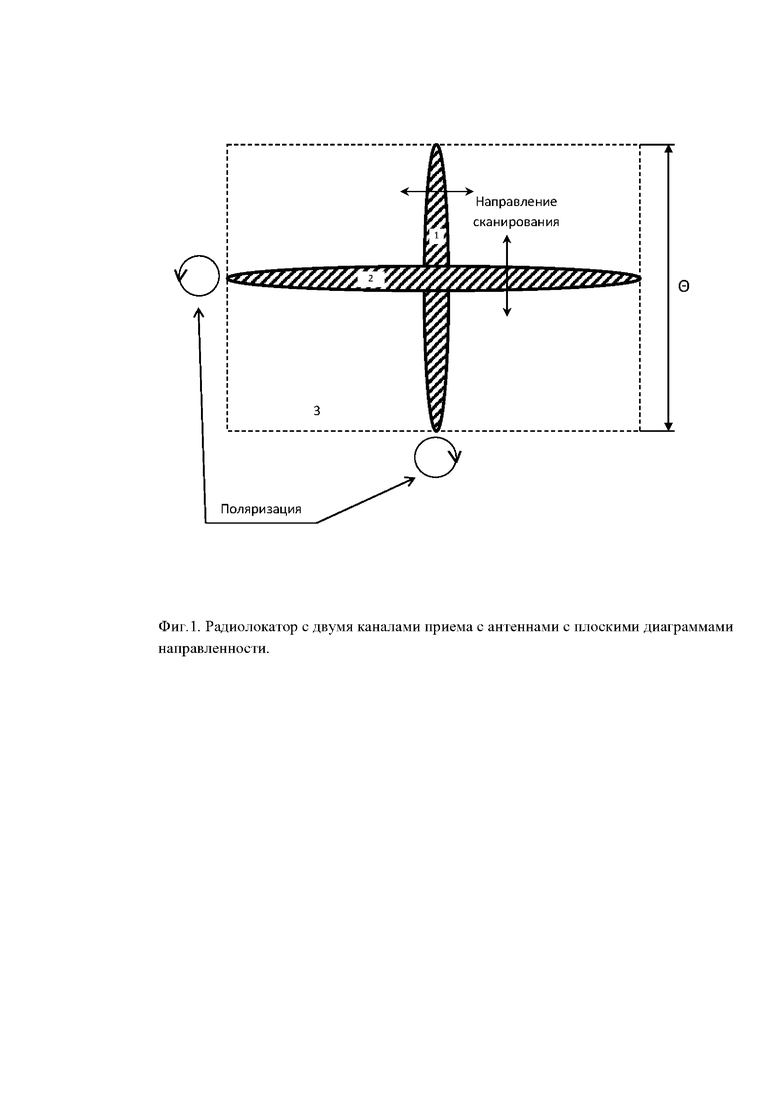
Фиг.1. Радиолокатор с двумя каналами приема с антеннами с плоскими диаграммами направленности.
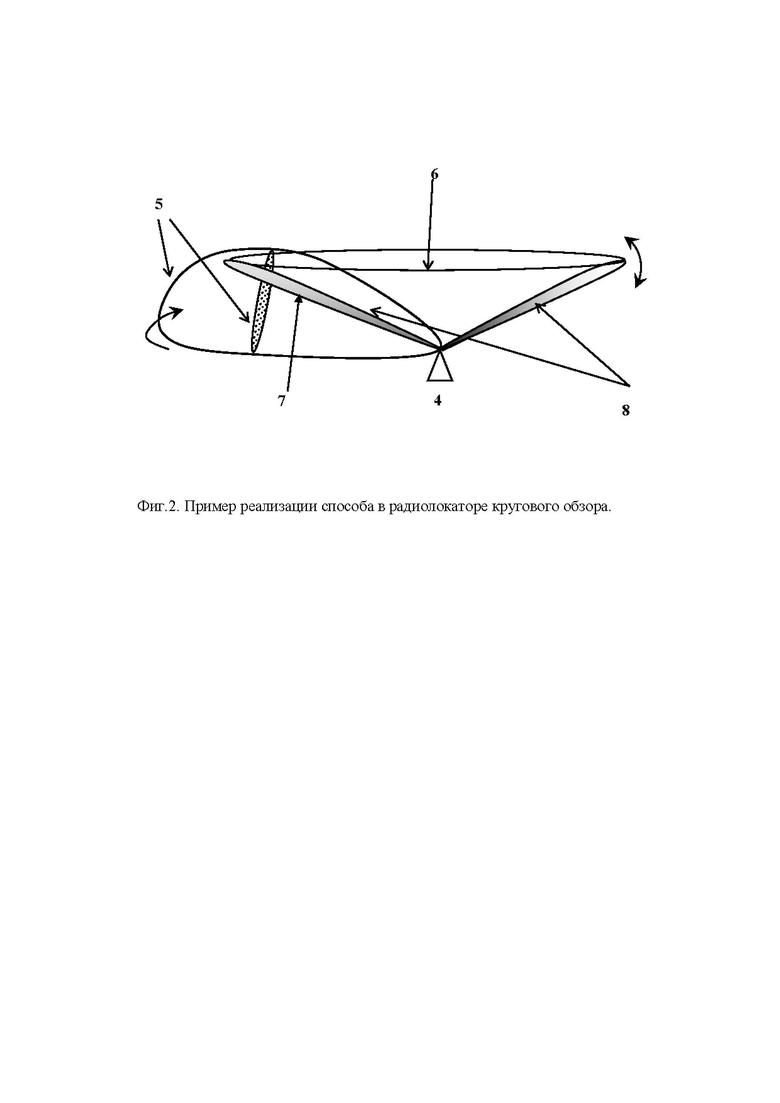
Фиг.2. Пример реализации способа в радиолокаторе кругового обзора.
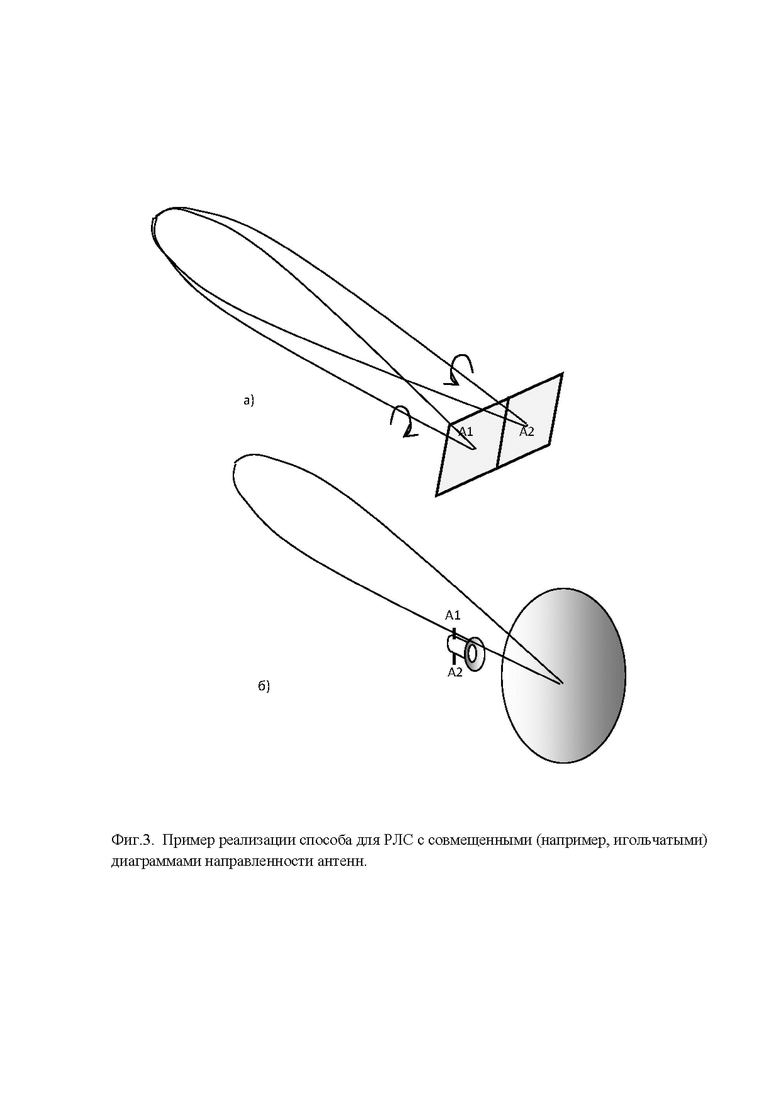
Фиг.3. Пример реализации способа для РЛС с совмещенными (например, игольчатыми) диаграммами направленности антенн.
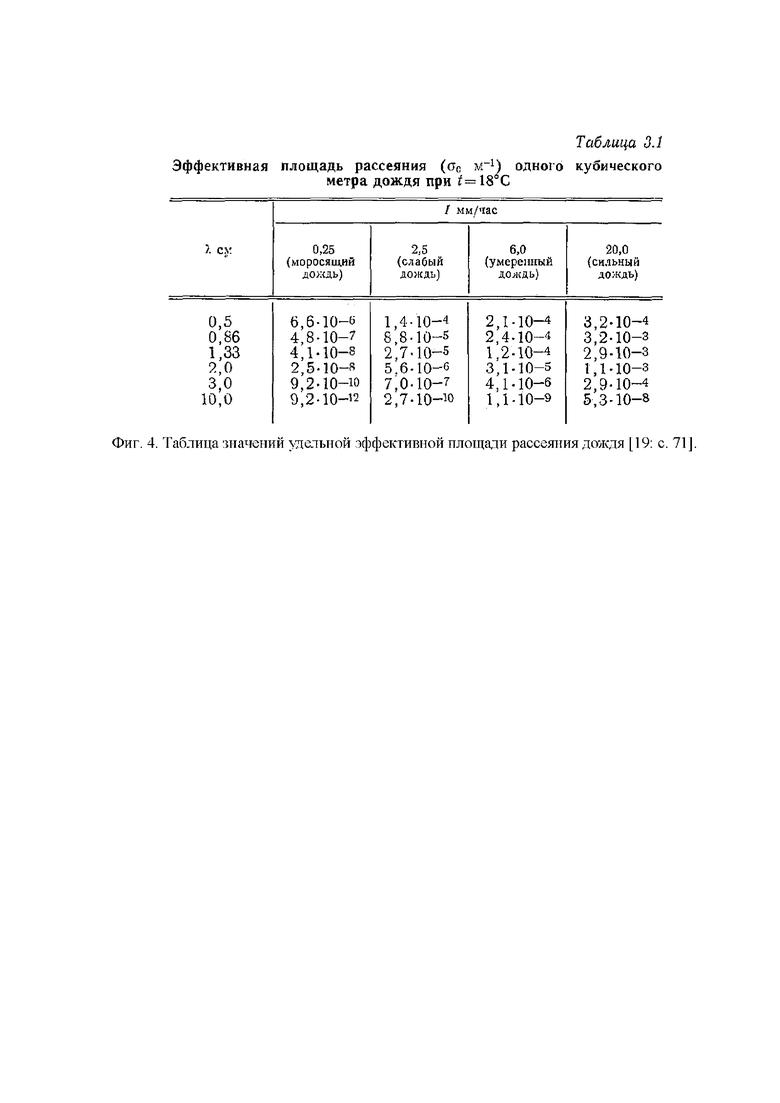
Фиг. 4 Таблица значений удельной эффективной площади рассеяния дождя [19: с. 71].
На фигурах обозначены следующие элементы:
1-антенна 1
2-антенна 2
3- рабочий сектор РЛС
4 – РЛС
5 - Диаграмма направленности основной антенны, сканирующей в азимутальной плоскости РЛС кругового обзора и ее сечения в вертикальной плоскости
6 - Диаграмма направленности дополнительной неподвижной антенны, ненаправленной в горизонтальной плоскости. В вертикальной плоскости диаграмма направленности узкая и управляется по углу места электронным способом.
7 - Область пересечения диаграмм направленности основной и дополнительной антенн
8 - Сечение диаграммы направленности дополнительной неподвижной антенны вертикальной плоскостью.
Данное изобретение направлено на устранение потери информации о координатах МО, их границах, интенсивностях и направлении движения путем использования дополнительного канала приема отраженных от МО и ВС сигналов с антенной, предназначенной для приема сигналов с линейной, эллиптической или круговой поляризации с направлением вращения вектора электрического поля, противоположным направлению вращения этого вектора в основной антенне РЛС.
Сигналы, принятые дополнительной антенной, используют для обнаружения воздушных судов в угловом секторе пересечения диаграмм направленности основной и дополнительной антенн,
В случае плоской диаграммы направленности основной антенны, диаграмму направленности дополнительной антенны выбирают из условия ее пересечения с диаграммой направленности основной антенны в максимально узком секторе пространственных углов, сигнал, принятый дополнительной антенной считают сигналом, отраженным от воздушных судов, местных предметов и метеорологических объектов, находящихся в зоне пересечения главных лепестков основной и дополнительной антенн, после каждого цикла обзора основной антенны изменяют положение диаграммы направленности дополнительной антенны так, чтобы за несколько циклов обзора основной антенны область пересечения диаграмм направленности антенн покрыла весь рабочий сектор углов радиолокатора.
В случае, когда диаграмму направленности дополнительной антенны выбирают совпадающей по форме и направлению с диаграммой направленности основной антенны при любом ее положении в процессе сканирования рабочего сектора углов радиолокатора, оценку координат метеорологических объектов и воздушных судов в каждом канале производят как в радиолокаторах с одним лучом.
При излучении зондирующих сигналов РЛС через основную антенну и прием отраженных сигналов дополнительной антенной появляется возможность приема и обработки сигналов, отраженных от МО. При этом можно считать, что принятый дополнительной антенной сигнал есть результат отражения зондирующего сигнала из области пересечения диаграмм направленности основной и дополнительной антенн. Отражающий объем МО в этом случае определяется как произведение площади зоны пересечения диаграмм направленности основной и дополнительной антенн, обращенной в сторону РЛС, на величину разрешающей способности РЛС по дальности. А эффективная поверхность рассеяния (ЭПР) МО определяется как произведение отражающего объема на ЭПР одного метра кубического отражающего объема, которую для различных интенсивностей осадков можно определить, например, из таблицы 3.1, приведенной в [19: с. 71] (фиг.4). При определении возможности обнаружения МО в дополнительном канале приема следует учесть:
1. В [19] данные таблицы (фиг.4) приведены для антенны с линейной поляризацией. Для основной и дополнительной антенн с круговой поляризацией и разными направлениями вращения вектора напряженности электрического поля данных в таблице останутся справедливыми. Если дополнительная антенна имеет поляризацию, отличную от круговой, следует учесть потери, вызванные этим. Так, при линейной поляризации дополнительной антенны потери составят 3 дБ.
2. При расчете мощности отраженного от МО сигнала на входе приемника дополнительного канала приема  следует использовать уравнение радиолокации в виде [1: с. 236]:
следует использовать уравнение радиолокации в виде [1: с. 236]:
 .
.
Здесь:
 - мощность, излучаемая через антенну основного канала РЛС;
- мощность, излучаемая через антенну основного канала РЛС;
 - коэффициент усиления основной антенны РЛС;
- коэффициент усиления основной антенны РЛС;
 - ЭПР отражающего объема МО на дальности R ,
- ЭПР отражающего объема МО на дальности R ,
 - эффективная площадь дополнительной антенны.
- эффективная площадь дополнительной антенны.
3. Если оценивать возможность обнаружения ВС дополнительным каналом приема, то вид уравнения радиолокации останется таким же, но вместо ЭПР отражающего объема  следует использовать ЭПР ВС
следует использовать ЭПР ВС  . Однако, в дополнение к этому следует учитывать потери при приеме отраженных сигналов антенной с противоположным направление вращения вектора напряженности электрического поля, значения которых авторам не удалось найти в доступных источниках.
. Однако, в дополнение к этому следует учитывать потери при приеме отраженных сигналов антенной с противоположным направление вращения вектора напряженности электрического поля, значения которых авторам не удалось найти в доступных источниках.
Примеры реализации способа.
На Фиг. 1, 2 и 3 представлены примеры применения предлагаемого способа в радиолокаторах различного назначения.
На фиг.1 приведен пример радиолокатора с двумя каналами приема с антеннами с плоскими диаграммами направленности. Антенны и их приемные каналы поочередно выполняют функции основной и дополнительной антенны. Антенна 1 сканирует в горизонтальной (по рисунку) плоскости. Антенна 2 сканирует в вертикальной плоскости. Этот вариант реализации способа может быть применен, например, в посадочных радиолокаторах [8, 9, 10, 11]. Для посадочных радиолокаторов характерно поочередное сканирование рабочего сектора антенной курса (антенна 1) в горизонтальной плоскости и антенной глиссады (антенна 2) в вертикальной плоскости. Для реализации способа, например, в течение одного цикла сканирования антенны 1 по курсу диаграмму направленности антенны 2 следует ориентировать в одном из N фиксированных положений в секторе ее сканирования. Таким образом, за N циклов сканирования антенны 1 в канале приема антенны 2 будет получена информация о МО во всем рабочем секторе углов радиолокатора. Количество фиксированных положений антенны 2 N не должно быть меньше отношения ее угла сканирования Θ к ее ширине диаграммы направленности в вертикальной плоскости. Поочередная работа каждой из антенн в качестве основной и дополнительной антенны требует гибкого управления положением их диаграмм направленности в пространстве. Наиболее просто способ может быть реализован, если в качестве антенн используются управляемые фазированные антенные решетки.
На фиг. 2 представлен пример реализации способа в радиолокаторе кругового обзора. Основная антенна с круговой поляризацией с узкой диаграммой направленности в горизонтальной плоскости и широкой (например, косекансной) в вертикальной плоскости сканирует по азимуту в секторе углов до 360 градусов. Такие диаграммы направленности характерны для двухкоординатных (азимут, дальность) РЛС управления воздушным движением. Дополнительная антенна в этом случае должна представлять собой линейную ФАР, расположенную вертикально [12: с. 13, 13: с. 191-194]. Эта антенна имеет диаграмму направленности, сосредоточенную у поверхности конуса: узкую диаграмму направленности в вертикальной плоскости, и круговую диаграмму направленности в горизонтальной плоскости. Элементарные излучатели, из которых состоит такая ФАР, также имеют круговую диаграмму направленности в горизонтальной плоскости. В результате управления диаграммой направленности дополнительной ФАР обеспечивается изменение наклона луча в вертикальном сечении в пределах рабочего сектора углов основной антенны по углу места. Наиболее просто такая ФАР может быть реализована из вертикально расположенных вибраторов и, как следствие, имеет вертикальную поляризацию.
На фиг.3. представлены два варианта реализации способа для РЛС с игольчатой диаграммой направленности антенны.
а) Две антенны А1 и А2, сканирующие синхронно механически или электронным способом в горизонтальной и/или вертикальной плоскости, с круговой поляризацией и противоположными направлениями вращения вектора напряженности электрического поля. В дальней зоне диаграммы направленности антенн совмещены. Излучение зондирующих сигналов производится, например, через антенну А1. Прием отраженных сигналов осуществляется через антенны А1 и А2. При наличии МО, отраженные от них сигналы в приемном канале А1 существенно подавлены [1, 2, 3, 4]. Отражения от МО в то же время в неподавленном виде присутствуют на выходе антенны А2, что позволяет с этого выхода реализовать метеоканал радиолокатора.
б) Одна зеркальная антенна с двухканальным облучателем с круговой поляризацией с ортогональными направлениями вращения [17, 18]. Диаграммы направленности антенн каналов совмещены. Все, что сказано в подпункте а), здесь также справедливо. Но выходы антенн А1 и А2 следует понимать как два выхода облучателя А1 и А2. Излучение зондирующих сигналов производят по одному из входов облучателя, двухканальный прием производят по обоим входам облучателя.
Возможна реализация способа с совмещенными диаграммами направленности основной и дополнительной антенн (как на фиг.3), когда антенны имеют одинаковые широкие в вертикальной плоскости диаграммы направленности, как основная антенна на фиг.2. Однако, в этом случае будет исключена возможность получения информации о распределении интенсивности МО по углу места.
В дополнительном канале приема возможно применение таких же алгоритмов приема и обработки отраженных сигналов, как и в основном канале приема. Это означает, что при отсутствии МО или при их незначительной интенсивности есть возможность повысить вероятность обнаружения ВС в рабочем секторе углов РЛС путем объединения результатов обнаружения и измерения координат ВС в основном и дополнительном канале приема. С наибольшим успехом это можно реализовать в вариантах, представленных на фиг.1 и фиг.3. В варианте реализации способа, представленном на фиг. 2, использование такой возможности затруднено в силу малого по сравнению с основной антенной коэффициента усиления дополнительной антенны.
Список литературы
1. Теоретические основы радиолокации. Под ред. Ширмана Я.Д. Учебное пособие для вузов. М., Сов. радио, 1970. -560 с.
2. Теоретические основы радиолокации. Коростелев А.А., Клюев Н.Ф., Мельник Ю.А. и др. Учебное пособие для вузов/ Под ред. В. Е. Дулевича. - 2-е изд., перераб. и доп. - М., Сов. радио, 1978. - 608 с.
3. Бакулев П. А., Степин В. М. Методы и устройства селекции движущихся целей. - М.: Радио и связь, 1986. -288 с
4. Волков С.И., Каргапольцев А.А., Курилов Н.Н. Радиолокационная система посадки РСП-6М2: Учебное пособие. / Государственное образовательное учреждение высшего профессионального образования «Московский государственный институт радиотехники, электроники и автоматики (технический университет)». – М., 2010. – 153 с.
5. Хансен P.K. Сканирующие антенные системы СВЧ. / Пер. с англ. под ред. Г.Т.Маркова и А.Ф.Чаплина. Т.2 -М.: Сов.радио, 1969. -496 с.
6. Пат. 2096802 Российская Федерация, МКП G 01 S 13/02. Способ обзора воздушного пространства радиолокационными станциями с плоскими лучами диаграмм направленности антенн/Б.Г. Беляев, Г.Н. Голубев, В.А. Жибинов; заявитель и патентообладатель НИИИП. - № 96109523/09; заявл. 12.05.1996; опубл. 20.11.1997, Бюл. № _.
7. Пат. 2117313 Российская Федерация, МКП G 01 S 13/06. Способ обзора воздушного пространства радиолокационными станциями с плоскими лучами диаграмм направленности антенн/Б.Г. Беляев, Г.Н. Голубев, В.А. Жибинов; заявитель и патентообладатель НИИИП. - № 96109550/09; заявл. 12.05.1996; опубл. 10.08.1998, Бюл. № _.
8. T-CZ. Precision approach radar RP-6PA. [Электронный ресурс]. – Режим доступа: http://www.tcz.cz/radar-systems/precision-approach-radar-rp-6pa/?lang=en, свободный – (2020).
9. Основы радиолокации. FBPAR. [Электронный ресурс]. – Режим доступа: https://www.radartutorial.eu/19.kartei/03.atc/karte032.ru.html, свободный – (2020).
10. ELDIS Radar Systems. PAR-E PRECISION APPROACH RADAR. [Электронный ресурс]. – Режим доступа: https://www.eldis.cz/en/radars/par-e-precision-approach-radar/par-e-precision-approach-radar-pdf-en/, свободный – (2020).
11. Пат. 2556708 C1 Российская Федерация, МКП G 01 S 13/52. Посадочный радиолокатор/В.П.Иванов, В.М.Король, Е.А.Синицын, А.Ю.Коршунов; заявитель и патентообладатель Открытое акционерное общество "Концерн ПВО "Алмаз-Антей" (RU). - №2014110066/07, заявл. 17.03.2014; опубл. 20.07.2015 Бюл. № 20.
12. Кубанов В.П. Направленные свойства антенных решеток. — Самара: ПГУТИ, 2015. – 56 с., ил.
13. Вершков М.В., Миротворский О.Б. Судовые антенны. ‒3-е изд. перераб. и доп. ‒Л. Судостроение, 1990. ‒304 с.
14. Трассовый обзорный радиолокатор Утёс-Т. [Электронный ресурс]. – Режим доступа: https://infopedia.su/15x13820.html/, свободный – (2017).
15. ПАО «НПО «АЛМАЗ». ТОП «ЛЭМЗ». Трассовые радиолокационные комплексы «Лира-Т». [Электронный ресурс]. – Режим доступа: https://lemz.ru/%D1%82%D1%80%D0%B0%D1%81%D1%81%D0%BE%D0%B2%D1%8B%D0%B5-%D1%80%D0%B0%D0%B4%D0%B8%D0%BE%D0%BB%D0%BE%D0%BA%D0%B0%D1%86%D0%B8%D0%BE%D0%BD%D0%BD%D1%8B%D0%B5-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81/, свободный – (2020).
16. ПАО «НПО «АЛМАЗ». ТОП «ЛЭМЗ». Трассовый Радиолокационный Комплекс «СОПКА-2». [Электронный ресурс]. – Режим доступа: https://lemz.ru/%D1%81%D0%BE%D0%BF%D0%BA%D0%B0-2/, свободный – (2020).
17. Двухканальный рупорный облучатель с биортогональной круговой поляризацией ао6.27. [Электронный ресурс]. – Режим доступа: http://alphapribor.ru/catalog/izmeritelnoe_oborudovanie/antenny_izmeritelnye/passivnaya_shirokopolosnaya_vsenapravlennaya_antenna_as6_47/ , свободный – (2018).
18. Дёмин Д.А. , Чубинский Н.П. Облучатель с двумя ортогональными круговыми поляризациями. Журнал радиоэлектроники, электронный журнал ИРЭ АН РФ. – Режим доступа: http://jre.cplire.ru/jre/jun14/6/text.html, свободный – (№ 6 - июнь 2014)
19. Степаненко В.Д. Радиолокация в метеорологии. –Ленинград.: Гидрометеорологическое издательство, 1966. – 350 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Способ радиолокации целей | 2023 |
|
RU2808952C1 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
| СПОСОБ СЕЛЕКЦИИ ЦЕЛЕЙ | 2004 |
|
RU2291465C2 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ЭЛЕКТРОННЫХ УСТРОЙСТВ С ПОЛУПРОВОДНИКОВЫМИ ЭЛЕМЕНТАМИ | 2010 |
|
RU2432583C1 |
| Система защиты кораблей от подводных дронов | 2024 |
|
RU2832756C1 |
| Способ обеспечения воздушных судов метеорологической информацией | 2017 |
|
RU2672040C2 |
Изобретение относится к области управления воздушным движением и может применяться для контроля воздушной обстановки, обнаружения воздушных судов и метеорологических объектов. Технический результат заключается в повышении достоверности обнаружения и измерения параметров движения воздушных судов и метеорологических объектов. Предложен способ получения информации о метеорологических объектах в первичных радиолокаторах, заключающийся в использовании основной антенны радиолокатора с круговой поляризацией при излучении зондирующих сигналов и приеме сигналов, отраженных от воздушных судов, неподвижных местных предметов и метеорологических объектов, при этом используют дополнительный канал приема и обработки отраженных сигналов с дополнительной антенной с линейной, эллиптической или круговой поляризацией с направлением вращения вектора напряженности электрического поля, противоположным направлению вращения вектора напряженности электрического поля основной антенны. 1 з.п. ф-лы, 4 ил.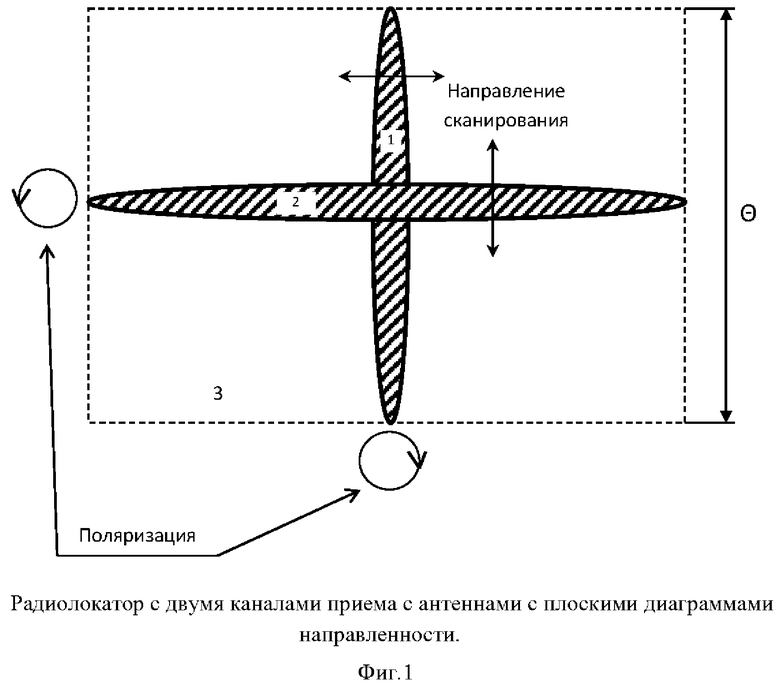
1. Способ получения информации о метеорологических объектах в первичных радиолокаторах, заключающийся в использовании основной антенны радиолокатора с круговой поляризацией при излучении зондирующих сигналов, приеме и обработке сигналов, отраженных от воздушных судов, неподвижных местных предметов и метеорологических объектов, отличающийся тем, что используют дополнительный канал приема и обработки отраженных сигналов с дополнительной антенной с линейной, эллиптической или круговой поляризацией с направлением вращения вектора напряженности электрического поля, противоположным направлению вращения вектора напряженности электрического поля основной антенны, форму диаграммы направленности дополнительной антенны выбирают из условия ее пересечения с диаграммой направленности основной антенны в максимально узком секторе пространственных углов, сигнал, принятый дополнительной антенной, считают сигналом, отраженным от воздушных судов, местных предметов и метеорологических объектов, находящихся в зоне пересечения главных лепестков основной и дополнительной антенн, после каждого цикла обзора основной антенны изменяют положение диаграммы направленности дополнительной антенны так, чтобы за несколько циклов обзора основной антенны область пересечения диаграмм направленности антенн покрыла весь рабочий сектор углов радиолокатора.
2. Способ по п. 1, отличающийся тем, что, в случае, когда диаграмму направленности дополнительной антенны выбирают совпадающей по форме и направлению с диаграммой направленности основной антенны при любом ее положении в процессе сканирования рабочего сектора углов радиолокатора, оценку координат метеорологических объектов и воздушных судов в каждом канале производят как в радиолокаторах с одним лучом.
| US 8098189 B1 - 2012.01.17 | |||
| Igor R | |||
| Ivic, Options for Polarimetric Variable Measurements on the MPAR Advanced Technology Demonstrator, Conference: 2018 IEEE Radar Conference, April 2018 | |||
| Н | |||
| В | |||
| Кхыонг, Обоснование возможности применения посадочного радиолокатора для обнаружения метеообразований, Труды МФТИ, Том 13, No1, 2021 | |||
| Джордже Миркович, |

