Изобретение относится к области систем автоматического управления, в частности к системам наведения в двух плоскостях артиллерийского и ракетного вооружения, пусковых установок, исполнительных устройств мобильных робототехнических комплексов, в которых требуется обход опасных зон.
Известна система стабилизации и наведения (Патент на полезную модель РФ №7488 МПК F41G 5/24. Заявлено 07.08.1997. Опубликовано 16.08.1998). Недостатком данной системы является невысокая точность наведения вследствие использования в качестве сигналов главной обратной связи сигналов абсолютных перемещений в вертикальной и горизонтальной плоскостях, полученных путем интегрирования сигналов от датчиков абсолютной скорости.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является система стабилизации и наведения (Патент на изобретение РФ №2095728 МПК F41G 5/24. Заявлено 05.05.1996. Опубликовано 10.11.1997). Недостатком данной системы являются возможные автоколебания привода вертикального наведения и привода горизонтального наведения при переключениях управления по сигналам от датчиков абсолютного положения на управление по сигналам от датчиков относительного положения и обратно на границе опасной зоны.
Задачей предлагаемого изобретения является исключение автоколебаний приводов вертикального и горизонтального наведения на границе опасной зоны и сокращение времени на обход этой опасной зоны.
Сущность технического решения заключается в следующем. Наведение оружия объектов военной техники в пространстве осуществляется с использованием сигналов от датчиков абсолютного углового положения. При наличии в секторе наведения опасных зон, движение оружия в которых недопустимо (например, кабины транспортного средства, на котором расположено оружие, воздухозаборной трубы и т.д.), перемещение оружия в требуемое направление в пространстве должно выполняться с обходом данной опасной зоны. Для обеспечения обхода опасной зоны могут использоваться датчики относительного перемещения, измеряющие угол поворота оружия относительно этой опасной зоны. При подходе к опасной зоне, как это реализовано в прототипе, управление приводами вертикального и горизонтального наведения производится по сигналам от датчиков относительного положения. После обхода опасной зоны управление приводами вертикального и горизонтального наведения снова производится по сигналам от датчиков абсолютного положения. При этом, поскольку при обходе опасной зоны показание датчика абсолютного положения привода горизонтального наведения не анализируется, возможен возврат в сторону опасной зоны с последующим переключением на управление от датчиков относительного положения. В результате при реализации системы наведения по схеме прототипа возможно возникновение незатухающих автоколебаний при переключениях управления по сигналам от датчиков абсолютного положения на управление по сигналам от датчиков относительного положения и обратно на границе опасной зоны.
Исключение автоколебаний приводов вертикального и горизонтального наведения при обходе опасной зоны возможно за счет изменения структуры системы наведения, а именно за счет исключения из приводов вертикального и горизонтального наведения датчиков относительного положения и введения управления движениями приводов вертикального и горизонтального наведения при обходе опасной зоны по сигналам от концевых выключателей, установленных на границах этой опасной зоны, с постоянным анализом отклонения текущего направления оружия в вертикальной и горизонтальной плоскостях от заданного направления в пространстве.
Указанный технический результат при осуществлении изобретения достигается тем, что в систему наведения, содержащую приводы вертикального и горизонтального наведения, причем привод вертикального наведения содержит сумматор, ключ, инвертор, блок эталонного напряжения, исполнительный привод вертикального наведения, датчик абсолютного положения вертикального наведения, вход которого механически связан с выходом исполнительного привода вертикального наведения, привод горизонтального наведения содержит сумматор, ключ, исполнительный привод горизонтального наведения и датчик абсолютного положения горизонтального наведения, вход которого механически связан с выходом исполнительного привода горизонтального наведения, введены первый концевой выключатель, вход которого механически связан с выходом исполнительного привода вертикального наведения, второй и третий концевые выключатели, входы которых механически связаны с выходом исполнительного привода горизонтального наведения, компаратор, вход которого соединен с выходом инвертора, первый элемент И, первый вход которого соединен с выходом второго концевого выключателя, второй вход соединен с выходом третьего концевого выключателя, второй элемент И, первый вход которого соединен с выходом первого элемента И, а второй вход соединен с выходом первого концевого выключателя, первый элемент НЕ, вход которого соединен с выходом первого концевого выключателя, второй элемент НЕ, вход которого соединен с выходом первого элемента И, RS-триггер, S - вход которого соединен с выходом второго элемента И, R - вход соединен с выходом второго элемента НЕ, третий элемент И, первый вход которого соединен с выходом первого элемента НЕ, второй вход соединен с выходом компаратора, третий вход соединен с прямым выходом RS-триггера, в привод вертикального наведения включен блок коммутации, первый вход которого соединен с выходом сумматора привода вертикального наведения, второй вход соединен с выходом блока эталонного напряжения привода вертикального наведения, третий управляющий вход соединен с выходом второго элемента И, первый вход сумматора привода вертикального наведения является входом привода вертикального наведения, второй вход сумматора привода вертикального наведения соединен с выходом датчика абсолютного положения вертикального наведения, вход инвертора соединен с выходом сумматора привода вертикального наведения, вход ключа привода вертикального наведения соединен с выходом блока коммутации, второй его управляющий вход и выход соединены соответственно с выходом третьего элемента И и с входом исполнительного привода вертикального наведения, первый вход сумматора привода горизонтального наведения является входом привода горизонтального наведения, второй вход сумматора привода горизонтального наведения соединен с выходом датчика абсолютного положения горизонтального наведения, первый вход ключа привода горизонтального наведения соединен с выходом сумматора привода горизонтального наведения, второй его управляющий вход и выход соединены соответственно с выходом второго элемента И и с входом исполнительного привода горизонтального наведения.
В заявленном устройстве исключение автоколебаний приводов вертикального и горизонтального наведения на границе опасной зоны и сокращение времени на обход этой опасной зоны достигнуты за счет введения управления движениями приводов вертикального и горизонтального наведения при обходе опасной зоны по сигналам от концевых выключателей, установленных на границах этой опасной зоны, с использованием блока коммутации, компаратора, логических элементов И и НЕ, а также RS-триггера.
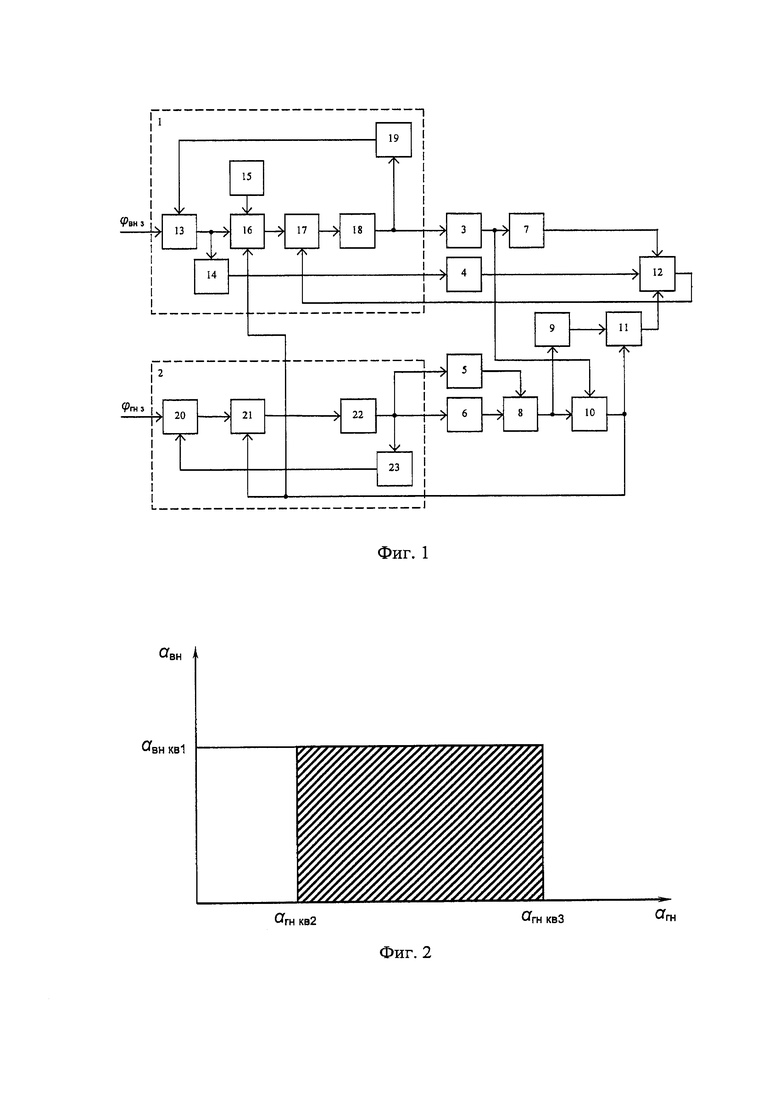
На фиг. 1 приведена схема заявленного устройства.
На фиг. 1 приняты следующие обозначения:
1 - привод вертикального наведения;
2 - привод горизонтального наведения;
3 - первый концевой выключатель;
4 - компаратор;
5 - второй концевой выключатель;
6 - третий концевой выключатель;
7 - первый элемент НЕ;
8 - первый элемент И;
9 - второй элемент НЕ;
10 - второй элемент И;
11 - RS-триггер;
12 - третий элемент И;
13, 20 - сумматор;
14 - инвертор;
15 - блок эталонного напряжения;
16 - блок коммутации;
17, 21 - ключ;
18 - исполнительный привод вертикального наведения;
19 - датчик абсолютного положения вертикального наведения;
22 - исполнительный привод горизонтального наведения;
23 - датчик абсолютного положения горизонтального наведения
ϕвн з - заданный угол вертикального наведения;
ϕгн з - заданный угол горизонтального наведения.
На фиг. 2 приведена схема установки концевых выключателей на границах опасной зоны, на которой опасная зона выделена заштрихованной областью.
На фиг. 2 приняты следующие обозначения:
αвн - угол вертикального наведения в относительной системе координат;
αгн - угол горизонтального наведения в относительной системе координат;
αвн кв 1 - угол срабатывания первого концевого выключателя;
αгн кв 2 _ угол срабатывания второго концевого выключателя;
αгн кв 3 - угол срабатывания третьего концевого выключателя.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, заключаются в следующем.
Система наведения (фиг. 1) содержит привод вертикального наведения 1, привод горизонтального наведения 2, первый концевой выключатель 3, компаратор 4, второй и третий концевые выключатели 5 и 6, первый элемент НЕ 7, вход которого соединен с выходом первого концевого выключателя 3, первый элемент И 8, первый и второй входы которого соединены соответственно с выходами второго и третьего концевых выключателей 5 и 6, второй элемент НЕ 9, вход которого соединен с выходом первого элемента И 8, второй элемент И 10, первый вход которого соединен с выходом первого элемента И 8, а второй вход соединен с выходом первого концевого выключателя 3, RS-триггер 11, S - вход которого соединен с выходом второго элемента И 10, R - вход соединен с выходом второго элемента НЕ 9, третий элемент И 12, первый вход которого соединен с выходом первого элемента НЕ 7, второй вход соединен с выходом компаратора 4, третий вход соединен с прямым выходом RS - триггера 11.
Привод вертикального наведения 1 содержит сумматор 13, первый вход которого является входом привода вертикального наведения 1, инвертор 14, вход которого соединен с выходом сумматора 13, блок эталонного напряжения 15, блок коммутации 16, первый вход которого соединен с выходом сумматора 13, второй вход соединен с выходом блока эталонного напряжения 15, третий управляющий вход соединен с выходом второго элемента И 10, ключ 17, первый вход которого соединен с выходом блока коммутации 16, второй управляющий вход соединен с выходом третьего элемента И 12, исполнительный привод вертикального наведения 18, вход которого соединен с выходом ключа 17, датчик абсолютного положения вертикального наведения 19, вход которого механически связан с выходом исполнительного привода вертикального наведения 18. Выход датчика абсолютного положения вертикального наведения 19 соединен со вторым входом сумматора 13.
Привод горизонтального наведения 2 содержит сумматор 20, первый вход которого является входом привода горизонтального наведения 2, ключ 21, первый вход которого соединен с выходом сумматора 20, второй управляющий вход соединен с выходом второго элемента И 10, исполнительный привод горизонтального наведения 22, вход которого соединен с выходом ключа 21, датчик абсолютного положения горизонтального наведения 23, вход которого механически связан с выходом исполнительного привода горизонтального наведения 22. Выход датчика абсолютного положения горизонтального наведения 23 соединен со вторым входом сумматора 20.
Вход первого концевого выключателя 3 механически связан с выходом исполнительного привода вертикального наведения 18. Вход компаратора 4 соединен с выходом инвертора 14. Входы второго и третьего концевых выключателей 5 и 6 механически связаны с выходом исполнительного привода горизонтального наведения 22.
Первый концевой выключатель 3 срабатывает в процессе работы привода вертикального наведения при опускании ниже угла αвн кв 1 (фиг. 2). При этом имевшийся на его выходе до срабатывания сигнал логического нуля изменяется на сигнал логической единицы.
Второй концевой выключатель 5 срабатывает при достижении угла αгн кв 2 в процессе движения привода горизонтального наведения из области, расположенной левее опасной зоны, в опасную зону. При углах αгн, не превышающих αгн кв 2, на выходе второго концевого выключателя 5 имеется сигнал логического нуля. При углах αгн, превышающих αгн кв 2, на выходе второго концевого выключателя 5 имеется сигнал логической единицы.
Третий концевой выключатель 6 срабатывает при достижении угла αгн кв 3 в процессе движения привода горизонтального наведения из области, расположенной правее опасной зоны, в опасную зону. При углах αгн, превышающих αгн кв 3, на выходе третьего концевого выключателя 6 имеется сигнал логического нуля. При углах αгн, не превышающих αгн кв 3, на выходе третьего концевого выключателя 6 имеется сигнал логической единицы.
Таким образом, при нахождении внутри опасной зоны на выходах первого, второго и третьего концевых выключателей 3, 5, 6 имеются сигналы логических единиц.
Система наведения работает следующим образом. При работе системы наведения вне опасной зоны на выходе хотя бы одного из концевых выключателей 3, 5, 6 (фиг. 1) имеется сигнал логического нуля. При этом на выходах второго и третьего элементов И 10 и 12 имеются сигналы логического нуля, в соответствии с которыми блок коммутации 16 и ключ 17 пропускают сигнал с выхода сумматора 13 на вход исполнительного привода вертикального наведения 18, а ключ 21 пропускает сигнал с выхода сумматора 20 на вход исполнительного привода горизонтального наведения 22. В результате привод вертикального наведения 1 отрабатывает имеющееся на выходе сумматора 13 рассогласование между заданным углом наведения ϕвн з и углом, измеренным датчиком абсолютного положения вертикального наведения 19, в сторону уменьшения абсолютной величины рассогласования. Одновременно привод горизонтального наведения 2 отрабатывает имеющееся на выходе сумматора 20 рассогласование между заданным углом наведения ϕгн з и углом, измеренным датчиком абсолютного положения горизонтального наведения 23, также в сторону уменьшения абсолютной величины этого рассогласования.
При подходе к опасной зоне сверху на выходах второго и третьего концевых выключателей 5 и 6 имеются сигналы логической единицы. При срабатывании первого концевого выключателя 3 вследствие опускания ниже угла αвн кв 1 на его выходе также устанавливается сигнал логической единицы. При этом на выходах первого и второго элементов И 8 и 10 формируются сигналы логических единиц. Сигнал логической единицы с выхода второго элемента И 10 поступает на S-вход RS-триггера 11, на выходе которого также устанавливается сигнал логической единицы.
Сигнал логической единицы с выхода второго элемента И 10 поступает на управляющий вход ключа 21. По этому сигналу ключ 21 разрывает цепь прохождения сигнала с выхода сумматора 20 на вход исполнительного привода горизонтального наведения 22, тем самым блокируя работу привода горизонтального наведения 2.
Одновременно по сигналу логической единицы на выходе второго элемента И 10 блок коммутации 16 отключает вход ключа 17 от выхода сумматора 13 и подключает к входу ключа 17 выход блока эталонного напряжения 15, в соответствии с сигналом от которого исполнительный привод вертикального наведения 18 выполняет выход из опасной зоны вверх до появления на выходе первого концевого выключателя 3 сигнала логического нуля.
При выходе вверх из опасной зоны на выходе первого концевого выключателя 3 устанавливается сигнал логического нуля. При этом на выходе первого элемента НЕ 7 устанавливается сигнал логической единицы. При наличии отрицательного рассогласования привода вертикального наведения 1 на выходе сумматора 13, отработка которого выполняется вниз, на выходе инвертора 14 имеется положительное напряжение, в соответствии с которым на выходе компаратора 4 устанавливается сигнал высокого уровня, то есть сигнал логической единицы. При наличии на выходах компаратора 4, первого элемента НЕ 7, RS-триггера 11 сигналов логических единиц на выходе третьего элемента И 12 устанавливается сигнал логической единицы, который поступает на управляющий вход ключа 17, разрывающего цепь прохождения сигнала с выхода блока коммутации 16 на вход исполнительного привода вертикального наведения 18 и тем самым блокирующего привод вертикального наведения 1, исключая повторный вход в опасную зону сверху.
Также при наличии на выходе первого концевого выключателя 3 сигнала логического нуля на выходе второго элемента И 10 устанавливается сигнал логического нуля, по которому ключ 21 пропускает сигнал с выхода сумматора 20 на вход исполнительного привода горизонтального наведения 22. Привод горизонтального наведения 2 возобновляет движение в сторону заданного угла наведения ϕгн з, обходя опасную зону по верхней ее границе.
При достижении одной из боковых границ опасной зоны в процессе отработки рассогласования приводом горизонтального наведения 2, определяемом по изменению на выходе второго или третьего концевых выключателей 5 и 6 сигнала логической единицы на сигнал логического нуля, на выходе первого элемента И 8 устанавливается сигнал логического нуля, по которому на выходе второго элемента НЕ 9 устанавливается сигнал логической единицы, поступающий на R - вход RS - триггера 11 и устанавливающий на его выходе сигнал логического нуля. Одновременно на выходе третьего элемента И 12 также устанавливается сигнал логического нуля, по которому ключ 17 возобновляет прохождение сигнала от сумматора 13 через блок коммутации 16 на вход исполнительного привода вертикального наведения 18. Прохождение выходного сигнала сумматора 13 через блок коммутации 16 при этом обеспечено сигналом логического нуля на выходе второго элемента И 10, поступающего на управляющий вход блока коммутации 16. В результате привод вертикального наведения 1 возобновляет отработку рассогласования в направлении заданного угла наведения ϕвн з после обхода системой наведения опасной зоны.
При подходе к опасной зоне слева на выходах первого и третьего концевых выключателей 3 и 6 имеются сигналы логической единицы. При срабатывании второго концевого выключателя 5 вследствие подхода к границе опасной зоны слева на его выходе также устанавливается сигнал логической единицы. При этом на выходах первого и второго элементов И 8 и 10 формируются сигналы логических единиц. Сигнал логической единицы с выхода второго элемента И 10 поступает на S-вход RS-триггера И, на выходе которого также устанавливается сигнал логической единицы.
Сигнал логической единицы с выхода второго элемента И 10 поступает на управляющий вход ключа 21. По этому сигналу ключ 21 разрывает цепь прохождения сигнала с выхода сумматора 20 на вход исполнительного привода горизонтального наведения 22, тем самым блокируя работу привода горизонтального наведения 2.
Одновременно по сигналу логической единицы на выходе второго элемента И 10 блок коммутации 16 отключает вход ключа 17 от выхода сумматора 13 и подключает к входу ключа 17 выход блока эталонного напряжения 15, в соответствии с сигналом от которого исполнительный привод вертикального наведения 18 выполняет обход опасной зоны по ее левой боковой границе движением вверх до появления на выходе первого концевого выключателя 3 сигнала логического нуля.
При установлении на выходе первого концевого выключателя 3 сигнала логического нуля на выходе первого элемента НЕ 7 устанавливается сигнал логической единицы. При наличии отрицательного рассогласования привода вертикального наведения 1 на выходе сумматора 13 на выходе инвертора 14 имеется положительное напряжение, в соответствии с которым на выходе компаратора 4 устанавливается сигнал высокого уровня, то есть сигнал логической единицы. При наличии на выходах компаратора 4, первого элемента НЕ 7, RS - триггера 11 сигналов логических единиц на выходе третьего элемента И 12 устанавливается сигнал логической единицы, который поступает на управляющий вход ключа 17, разрывающего цепь прохождения сигнала с выхода блока коммутации 16 на вход исполнительного привода вертикального наведения 18 и тем самым блокирующего привод вертикального наведения 1, исключая вход в опасную зону сверху.
Также при наличии на выходе первого концевого выключателя 3 сигнала логического нуля на выходе второго элемента И 10 устанавливается сигнал логического нуля, по которому ключ 21 пропускает сигнал с выхода сумматора 20 на вход исполнительного привода горизонтального наведения 22. Привод горизонтального наведения 2 возобновляет движение в сторону заданного угла наведения ϕгн з, обходя опасную зону по верхней ее границе.
При достижении правой границы опасной зоны в процессе отработки рассогласования приводом горизонтального наведения 2, определяемом по изменению на выходе третьего концевого выключателя 6 сигнала логической единицы на сигнал логического нуля, на выходе первого элемента И 8 устанавливается сигнал логического нуля, по которому на выходе второго элемента НЕ 9 устанавливается сигнал логической единицы, поступающий на R - вход RS-триггера 11 и устанавливающий на его выходе сигнал логического нуля. Одновременно на выходе третьего элемента И 12 также устанавливается сигнал логического нуля, по которому ключ 17 возобновляет прохождение сигнала от сумматора 13 через блок коммутации 16 на вход исполнительного привода вертикального наведения 18. Прохождение выходного сигнала сумматора 13 через блок коммутации 16 при этом обеспечено сигналом логического нуля на выходе второго элемента И 10, поступающего на управляющий вход блока коммутации 16. В результате привод вертикального наведения 1 возобновляет отработку рассогласования в направлении заданного угла наведения ϕвн з после обхода системой наведения опасной зоны.
Обход опасной зоны справа осуществляется аналогично, только подход к опасной зоне определяется по изменению сигнала логического нуля на сигнал логической единицы на выходе третьего концевого выключателя 6, а завершение обхода опасной зоны фиксируется по изменению сигнала логической единицы на сигнал логического нуля на выходе второго концевого выключателя 5.
Реализованная в системе наведения логика управления приводами вертикального и горизонтального наведения 1 и 2 исключает возможность возникновения автоколебаний на границе опасной зоны, так как обход опасной зоны состоит из:
- участка движения вверх, осуществляемого приводом вертикального наведения 1, не замкнутого обратной связью по положению, до верхней границы опасной зоны;
- участка движения по верхней границе опасной зоны, осуществляемого приводом горизонтального наведения 2, охваченным обратной связью по сигналу от датчика абсолютного положения горизонтального наведения 23, при заблокированном приводе вертикального наведения 1;
- конечного участка движения приводами вертикального и горизонтального наведения 1 и 2, охваченными обратными связями по сигналам соответственно от датчика абсолютного положения вертикального наведения 19 и от датчика абсолютного положения горизонтального наведения 23, к заданным углам наведения ϕвн з и ϕгн з.
При этом переключения структуры системы наведения, способные вызвать автоколебания в ней, отсутствуют.
Таким образом, введение управления движениями приводов вертикального и горизонтального наведения 1 и 2 при обходе опасной зоны по сигналам от первого, второго и третьего концевых выключателей 3, 5, 6, установленных на границах этой опасной зоны, с использованием компаратора 4, первого и второго элементов НЕ 7, 9, первого, второго и третьего элементов И 8, 10, 12, RS - триггера 11, а также блока коммутации 16 позволило исключить автоколебания приводов вертикального и горизонтального наведения 1 и 2 на границе опасной зоны и тем самым сократить время на обход этой опасной зоны.
В предлагаемом изобретении при практической реализации могут быть использованы известные схемные реализации сумматора, инвертора, ключа, компаратора, элемента И, элемента НЕ, блока эталонного напряжения, в том числе устройства, реализованные на базе программируемых ЭВМ и контроллеров.
В качестве блока коммутации могут быть использованы его известные схемные реализации, например известная схема (Патент на изобретение №2537256 МПК G05B 13/02, G05B 11/01. Заявлено 18.02.2014. Опубликовано 27.12.2014, фиг. 2).
В качестве датчика абсолютного положения вертикального наведения и датчика абсолютного положения горизонтального наведения могут быть использованы гироскопические датчики угла, гироскопические системы, а при установке системы наведения на неподвижное основание могут быть также использованы индуктивные, потенциометрические, емкостные и цифровые датчики угла.
В качестве исполнительного привода вертикального наведения и исполнительного привода горизонтального наведения могут быть использованы электрические, гидравлические и электрогидравлические приводы.
В качестве концевого выключателя могут быть использованы известные его схемные реализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система наведения | 2023 |
|
RU2819712C1 |
| Привод наведения | 2023 |
|
RU2817037C1 |
| Следящая система наведения | 2023 |
|
RU2815295C1 |
| Привод наведения | 2024 |
|
RU2835457C1 |
| Система управления наведением инерционного объекта | 2022 |
|
RU2795844C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 1996 |
|
RU2095728C1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
| Устройство автоматического управления положением разгрузочного конвейера горной машины | 1980 |
|
SU898059A1 |
Изобретение относится к области систем автоматического управления, в частности, к системам наведения в двух плоскостях артиллерийского и ракетного вооружения, пусковых установок, исполнительных устройств мобильных робототехнических комплексов, в которых требуется обход опасных зон. Система наведения содержит приводы вертикального и горизонтального наведения, причем привод вертикального наведения содержит сумматор, ключ, инвертор, блок эталонного напряжения, исполнительный привод вертикального наведения, датчик абсолютного положения вертикального наведения, вход которого механически связан с выходом исполнительного привода вертикального наведения, привод горизонтального наведения содержит сумматор, ключ, исполнительный привод горизонтального наведения и датчик абсолютного положения горизонтального наведения, вход которого механически связан с выходом исполнительного привода горизонтального наведения, введены первый, второй и третий концевые выключатели, установленные на границах этой опасной зоны, компаратор, первый, второй и третий элементы И, первый и второй элементы НЕ, RS-триггер, в привод вертикального наведения включен блок коммутации. Технический результат: исключение автоколебаний приводов вертикального и горизонтального наведения на границе опасной зоны и сокращение времени на обход этой опасной зоны. 2 ил.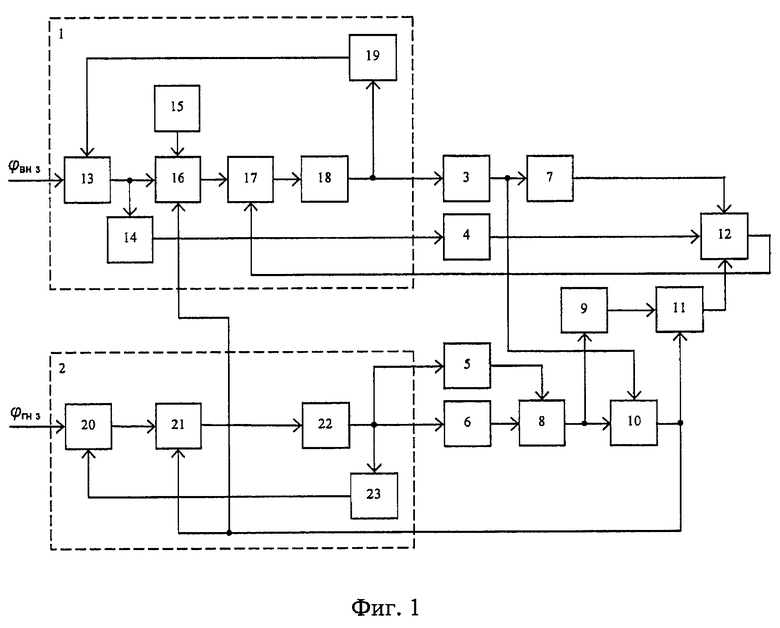
Система наведения, содержащая приводы вертикального и горизонтального наведения, причем привод вертикального наведения содержит сумматор, ключ, инвертор, блок эталонного напряжения, исполнительный привод вертикального наведения, датчик абсолютного положения вертикального наведения, вход которого механически связан с выходом исполнительного привода вертикального наведения, привод горизонтального наведения содержит сумматор, ключ, исполнительный привод горизонтального наведения и датчик абсолютного положения горизонтального наведения, вход которого механически связан с выходом исполнительного привода горизонтального наведения, отличающаяся тем, что в систему наведения введены первый концевой выключатель, вход которого механически связан с выходом исполнительного привода вертикального наведения, второй и третий концевые выключатели, входы которых механически связаны с выходом исполнительного привода горизонтального наведения, компаратор, вход которого соединен с выходом инвертора, первый элемент И, первый вход которого соединен с выходом второго концевого выключателя, второй вход соединен с выходом третьего концевого выключателя, второй элемент И, первый вход которого соединен с выходом первого элемента И, а второй вход соединен с выходом первого концевого выключателя, первый элемент НЕ, вход которого соединен с выходом первого концевого выключателя, второй элемент НЕ, вход которого соединен с выходом первого элемента И, RS-триггер, S - вход которого соединен с выходом второго элемента И, R - вход соединен с выходом второго элемента НЕ, третий элемент И, первый вход которого соединен с выходом первого элемента НЕ, второй вход соединен с выходом компаратора, третий вход соединен с прямым выходом RS-триггера, в привод вертикального наведения включен блок коммутации, первый вход которого соединен с выходом сумматора привода вертикального наведения, второй вход соединен с выходом блока эталонного напряжения привода вертикального наведения, третий управляющий вход соединен с выходом второго элемента И, первый вход сумматора привода вертикального наведения является входом привода вертикального наведения, второй вход сумматора привода вертикального наведения соединен с выходом датчика абсолютного положения вертикального наведения, вход инвертора соединен с выходом сумматора привода вертикального наведения, вход ключа привода вертикального наведения соединен с выходом блока коммутации, второй его управляющий вход и выход соединены соответственно с выходом третьего элемента И и с входом исполнительного привода вертикального наведения, первый вход сумматора привода горизонтального наведения является входом привода горизонтального наведения, второй вход сумматора привода горизонтального наведения соединен с выходом датчика абсолютного положения горизонтального наведения, первый вход ключа привода горизонтального наведения соединен с выходом сумматора привода горизонтального наведения, второй его управляющий вход и выход соединены соответственно с выходом второго элемента И и с входом исполнительного привода горизонтального наведения.
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПРИЦЕЛЬНОЙ СТРЕЛЬБЫ С ХОДА ПРИ ФЛАНГОВЫХ ПЕРЕМЕЩЕНИЯХ ТАНКА | 2000 |
|
RU2190822C2 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 1996 |
|
RU2095728C1 |
| CA 959563 A1, 17.12.1974 | |||
| WO 2012138242 A1, 11.10.2012. | |||
