Предлагаемое изобретение относится к методам определения дальности до источника излучения (ИИ) угломерным способом с использованием фазового пеленгатора, размещенного на борту самолета, выполняющего полет в сторону источника излучения.
При применении фазового метода пеленгации в одной плоскости (одномерного пеленгования) необходимы минимум две слабонаправленные антенны малых размеров, разнесенные на расстояние d, называемое базой. При этом среднеквадратическая ошибка измерения угла σα=λ/(2πd⋅cos(α)q0,5) пропорциональна отношению (λ/d), где α - угол между нормалью к базе и направлением принимаемого излучения, q - отношение сигнал/шум [Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. М.: Сов. радио, 1975. 336 с.: ил., стр. 91-93]. Требуемая точность в этом случае достигается за счет увеличения разноса антенн фазового пеленгатора, то есть увеличения базы d. В азимутальной плоскости это может быть достигнуто за счет размещения антенн пеленгатора, например, на законцовках крыла летательного аппарата. В угломестной плоскости разнести антенны практически невозможно.
Наиболее близким по сущности и достигаемому эффекту (прототипом) является способ определения дальности до наземного источника излучения с помощью фазового пеленгатора, размещенного на борту самолета, антенны которого установлены на законцовках крыла [Патент РФ на изобретение №2760975 «Способ определения местоположения источника излучения с борта летательного аппарата», опубликовано 02.12.2021, бюл. 34. МПК G01S 11/02, G01S 3/46, G01S 5/04]. Способ основан на последовательном измерении пеленгатором с борта самолета, выполняющего горизонтальный полет в сторону ИИ, углов на ИИ при отсутствии крена самолета и после выполнения крена, расчете дальности до ИИ с учетом знания высоты полета и угла крена по формуле  , где Н, γ - высота полета и угол крена самолета; θ0, θ - углы с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при полете самолета без крена и с креном, соответственно. Недостатком способа является низкая точность определения дальности до источника излучения, что связано с малым изменением углов при выполнении крена самолета на больших дальностях до ИИ и недостаточной точностью определения пеленгатором углов на ИИ. Также в способе-прототипе было принято допущение, что время, необходимое для выполнения крена, мало и расстояние между точками местонахождения самолета до и после выполнения крена незначительно.
, где Н, γ - высота полета и угол крена самолета; θ0, θ - углы с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при полете самолета без крена и с креном, соответственно. Недостатком способа является низкая точность определения дальности до источника излучения, что связано с малым изменением углов при выполнении крена самолета на больших дальностях до ИИ и недостаточной точностью определения пеленгатором углов на ИИ. Также в способе-прототипе было принято допущение, что время, необходимое для выполнения крена, мало и расстояние между точками местонахождения самолета до и после выполнения крена незначительно.
Техническим результатом изобретения является повышение точности определения дальности до источника излучения за счет использования рекуррентного фильтра Винера для оценки поступающих от фазового пеленгатора измерений пеленгов на источник излучения и дополнительной фильтрации с помощью рекуррентного фильтра нижних частот рассчитанных данных о дальности до источника излучения для устранения высокочастотных шумовых составляющих, а также учета времени, необходимого для выполнения крена самолета. Простота указанных фильтров позволяет практически реализовать их в бортовой аппаратуре беспилотного летательного аппарата с ограниченными массогабаритными характеристиками, то есть в небольших беспилотных аппаратах.
Указанный результат достигается тем, что в известном способе определения дальности до наземного источника излучения с самолета, оснащенного азимутальным фазовым пеленгатором, антенны которого размещены на законцовках крыла, основанном на обнаружении источника излучения, полете в сторону источника излучения, определении текущей высоты полета самолета, измерении с помощью пеленгатора углов на источник излучения при отсутствии и после выполнения крена, измерении угла крена и расчете с использованием полученных данных дальности до источника излучения, согласно изобретению
после измерения угла на источника излучения направляют самолет в его сторону таким образом, чтобы при горизонтальном полете угол между направлением полета самолета и пеленгом на источник излучения был не меньше 5°,
продолжают полет в горизонтальной плоскости с постоянным курсом, совершая последовательные маневры в виде крена в разные стороны,
при этом дискретно по времени на каждом i-ом шаге одновременно измеряют угол крена самолета и угол на источник излучения,
пересчитывают угол на источник излучения в предположении, что угол крена самолета равен нулю, по формуле  , где γi, θi - измеренные угол крена самолета и угол с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора; Н - высота полета самолета;
, где γi, θi - измеренные угол крена самолета и угол с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора; Н - высота полета самолета;  - отфильтрованное на предыдущем шаге фильтром нижних частот значение дальности до источника излучения и прогнозируемое ее приращение
- отфильтрованное на предыдущем шаге фильтром нижних частот значение дальности до источника излучения и прогнозируемое ее приращение  ,
,
проводят оценку пересчитанного угла по рекуррентной формуле Винера  , где
, где  - оценка пересчитанного угла на предыдущем шаге и прогнозируемое ее приращение
- оценка пересчитанного угла на предыдущем шаге и прогнозируемое ее приращение  ;
;  - коэффициент передачи фильтра Винера, σα - среднеквадратическая ошибка измерения пеленга на источник излучения, σξ - среднеквадратическое отклонение состояния системы,
- коэффициент передачи фильтра Винера, σα - среднеквадратическая ошибка измерения пеленга на источник излучения, σξ - среднеквадратическое отклонение состояния системы,
рассчитывают дальность до источника излучения по формуле  и осуществляют ее фильтрацию с использованием фильтра нижних частот по формуле
и осуществляют ее фильтрацию с использованием фильтра нижних частот по формуле  , где Di-1 - рассчитанная на предыдущем шаге дальность до источника излучения, Т - постоянная времени фильтра нижних частот, Δt - шаг дискретизации.
, где Di-1 - рассчитанная на предыдущем шаге дальность до источника излучения, Т - постоянная времени фильтра нижних частот, Δt - шаг дискретизации.
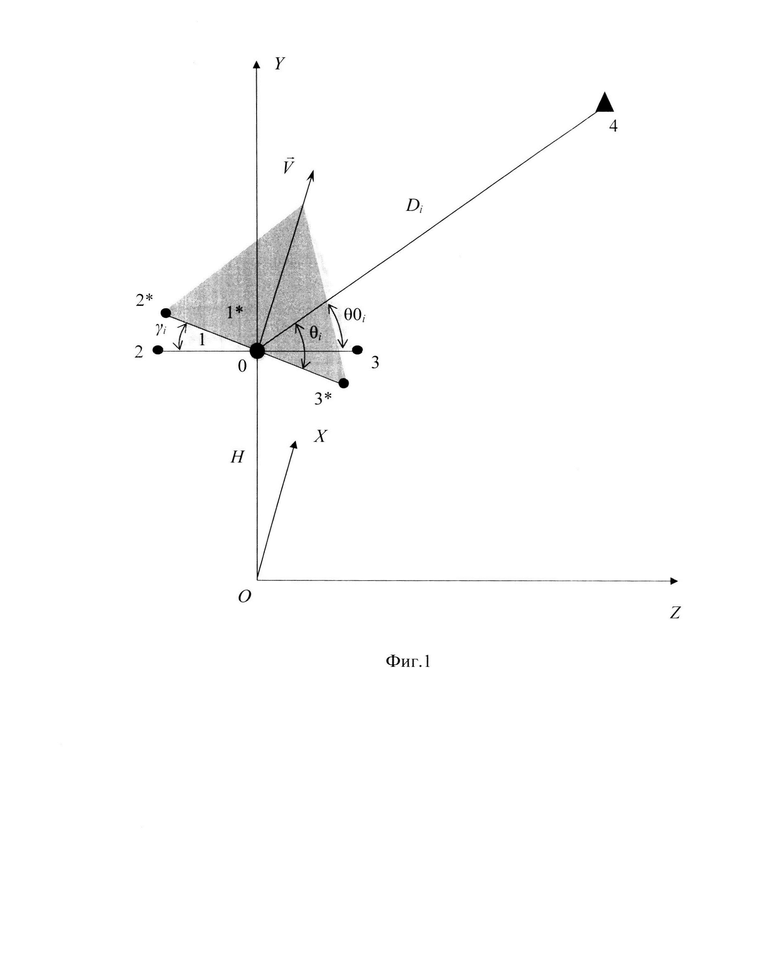
Сущность изобретения поясняется фиг. 1, где представлено взаимное расположение самолета и источника излучения в пространстве. На фиг. 1 обозначены: 0 - местоположение самолета на i-ом шаге измерений, которое соответствует середине антенной базы пеленгатора; 1* - плоскость самолета с углом крена γi; 1 - плоскость самолета в этой же точке, если бы угол крена был равен нулю; 2*, 3* (2, 3) - положение левой и правой антенн фазового пеленгатора при крене самолета (при нулевом крене); 4 - источник излучения; OXYZ - декартова система координат;  - вектор скорости самолета; H - высота полета самолета; Di - расстояние от самолета до ИИ; θi (θ0i) - измеряемый (пересчитанный) угол на ИИ относительно правой антенны при наличии (отсутствии) крена самолета.
- вектор скорости самолета; H - высота полета самолета; Di - расстояние от самолета до ИИ; θi (θ0i) - измеряемый (пересчитанный) угол на ИИ относительно правой антенны при наличии (отсутствии) крена самолета.
В способе-прототипе дальность до источника излучения рассчитывается по формуле  [Патент РФ на изобретение №2760975 «Способ определения местоположения источника излучения с борта летательного аппарата», опубликовано 02.12.2021, бюл. 34. МПК G01S 11/02, G01S 3/46, G01S 5/04]. При этом было принято допущение, что время, необходимое для выполнения крена самолета с положения без крена, когда угол на ИИ равен θ0i, на угол γi, когда угол на ИИ равен θi, мало и расстояние между точками местонахождения самолета до и после выполнения крена незначительно. В предложенном авторами способе устранено данное допущение. Для этого проводится пересчет измеренного угла на источник излучения для случая, если бы угол крена самолета был равен нулю, по преобразованной из способа-прототипа формуле
[Патент РФ на изобретение №2760975 «Способ определения местоположения источника излучения с борта летательного аппарата», опубликовано 02.12.2021, бюл. 34. МПК G01S 11/02, G01S 3/46, G01S 5/04]. При этом было принято допущение, что время, необходимое для выполнения крена самолета с положения без крена, когда угол на ИИ равен θ0i, на угол γi, когда угол на ИИ равен θi, мало и расстояние между точками местонахождения самолета до и после выполнения крена незначительно. В предложенном авторами способе устранено данное допущение. Для этого проводится пересчет измеренного угла на источник излучения для случая, если бы угол крена самолета был равен нулю, по преобразованной из способа-прототипа формуле  с последующей его фильтрацией от шумов измерения пеленгов и шумов состояния системы (оценкой) фильтром Винера [Оценка характеристик и выбор фильтров сопровождения в реальном масштабе времени для тактических систем вооружения. Зингер Р.А., Бенке К.В. Зарубежная радиоэлектроника, 1972, №1, с. 44-60]. Этот фильтр работает как фильтр Калмана после установившегося значения коэффициента передачи. При этом применительно к фильтру для пересчета применяется формула
с последующей его фильтрацией от шумов измерения пеленгов и шумов состояния системы (оценкой) фильтром Винера [Оценка характеристик и выбор фильтров сопровождения в реальном масштабе времени для тактических систем вооружения. Зингер Р.А., Бенке К.В. Зарубежная радиоэлектроника, 1972, №1, с. 44-60]. Этот фильтр работает как фильтр Калмана после установившегося значения коэффициента передачи. При этом применительно к фильтру для пересчета применяется формула

где  - сглаженное на предыдущем шаге фильтром нижних частот значение дальности и прогнозируемое ее приращение
- сглаженное на предыдущем шаге фильтром нижних частот значение дальности и прогнозируемое ее приращение  . Рекуррентная формула фильтра Винера имеет вид
. Рекуррентная формула фильтра Винера имеет вид

Коэффициент передачи фильтра Винера постоянный и может быть рассчитан заранее до полета по формуле  , в которой среднеквадратическая ошибка измерения пеленга на источник излучения σα известна, а среднеквадратическое отклонение состояния системы σξ выбирается с учетом маневренных свойств самолета и устойчивости фильтра.
, в которой среднеквадратическая ошибка измерения пеленга на источник излучения σα известна, а среднеквадратическое отклонение состояния системы σξ выбирается с учетом маневренных свойств самолета и устойчивости фильтра.
Так как при первоначальной пеленгации дальность до ИИ D0 и сглаженное ее значение  неизвестны, то им присваивается примерное значение, приращению -
неизвестны, то им присваивается примерное значение, приращению -  , где V - скорость самолета; Δt - шаг дискретизации по времени, углу на ИИ относительно антенн пеленгатора и ее оценке -
, где V - скорость самолета; Δt - шаг дискретизации по времени, углу на ИИ относительно антенн пеленгатора и ее оценке -  , где α - угол между направлением полета самолета и пеленгом на ИИ (примерно равен курсу самолета относительно ИИ при отсутствии крена самолета и большом отношении H/D), ее приращению -
, где α - угол между направлением полета самолета и пеленгом на ИИ (примерно равен курсу самолета относительно ИИ при отсутствии крена самолета и большом отношении H/D), ее приращению -  . То есть фильтр Винера полноценно начинает работать после 2-3 измерений и итераций.
. То есть фильтр Винера полноценно начинает работать после 2-3 измерений и итераций.
Рассчитывается дальность до ИИ по рекуррентной формуле

Однако рассчитанные дальности имеют высокочастотные шумы, связанные с быстрыми маневрами самолета в виде крена в разные стороны и, соответственно, быстрыми изменениями измеряемого угла по пилообразному закону. Для устранения этого осуществляется фильтрация (сглаживание) рассчитанных данных фильтром нижних частот по формуле

где Т - постоянная времени фильтра нижних частот [Кузовков Н.Т. и др. Нерерывные и дискретные системы управления и методы идентификации / Н.Т. Кузовков, С.В. Карабанов, О.С. Салычев. М: Машиностроение, 1978. 22 с. С. 56-57].
Исходя из вышеизложенного для реализации способа необходимо выполнить следующие операции.
Первоначально для i=0 шага после обнаружения ИИ и определения пеленга на ИИ направить самолет в его сторону таким образом, чтобы угол между направлением полета и пеленгом на ИИ был не менее 5°, определить скорость полета V, задать примерно дальность до источника излучения до (D0) и после фильтрации ( ), приращение
), приращение  , угол на источник излучения θ00, его оценку
, угол на источник излучения θ00, его оценку  и ее приращение
и ее приращение  , запомнить для следующего шага данные
, запомнить для следующего шага данные  . Коэффициент передачи K рассчитывается заранее и хранится в памяти постоянно.
. Коэффициент передачи K рассчитывается заранее и хранится в памяти постоянно.
Для следующего i-го шага:
1) определить высоту полета Н, выполнить крен и измерить угол крена γi и угол θi на источник излучения относительно антенн пеленгатора;
2) с использованием запомненных данных и текущих Н, γi пересчитать угол θi на θ0i по формуле (1), выполнить его оценку  по формуле фильтра Винера (2), определить приращение на следующий шаг
по формуле фильтра Винера (2), определить приращение на следующий шаг  ,
,
3) рассчитать дальность до ИИ Di по формуле (3) и сглаженное ее значение после фильтрации  по формуле (4), определить приращение
по формуле (4), определить приращение  , обновить в памяти данные
, обновить в памяти данные  ;
;
4) выровнять самолет в горизонтальной плоскости;
5) повторить операции 1)-4) с учетом того, что крен поочередно выполняется то в одну, то в другую сторону принимая значения ± γ.
Скорость, высота и крен самолета могут быть определены с использованием штатных бортовых устройств [Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. 399 с.: ил., стр. 239-260]. Например, в качестве датчика крена может быть применена гировертикаль, высотомера - барометрический высотомер, скорости - указатели истинной воздушной скорости и числа М.
Пересчет углов на источник излучения, расчет дальности до него с реализацией фильтров Винера и нижних частот могут быть выполнены на микроконтроллерах (например, на однокристальном восьмиразрядном микроконтроллере типа PIC16F62X) с программным обеспечением по представленным формулам (1)-(4).
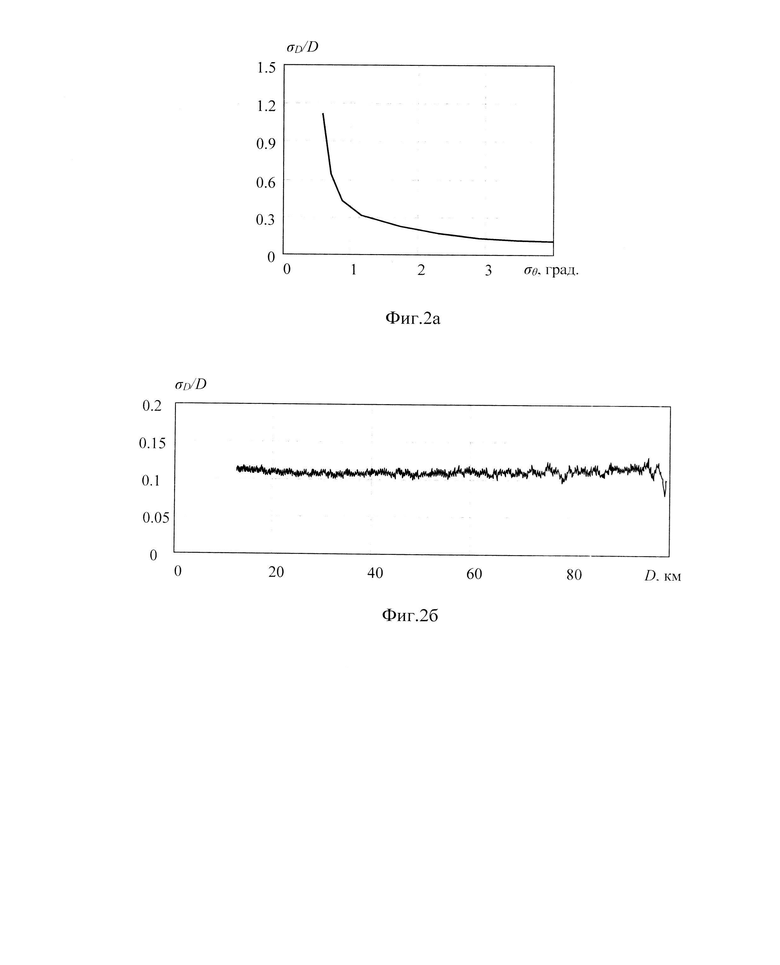
Для сравнения способа-прототипа и предложенного способа выполнена оценка относительной погрешности определения дальности (σd/D) от самолета до ИИ для чего было осуществлено имитационное моделирование полета самолета на источник излучения. При этом были приняты следующие исходные данные и допущения:
- самолет осуществляет горизонтальный полет с постоянным курсом на высоте 3 км со скоростью 100 м/с в сторону ИИ с дальности 100 км;
- при выполнении полета с шагом Δt=1c последовательно изменяется угол крена самолета на 45° и измеряется угол на ИИ θi;. При этом угол крена в зависимости от i-го шага принимает последовательно значения {-45°, 0, 45°};
- погрешность определения пеленга на ИИ фазовым пеленгатором составляет σα=0,5°;
- дисперсия отклонения состояния системы задается σξ=2°;
- коэффициент передачи фильтра Винера K=0,941;
- постоянная времени фильтра нижних частот Т=5 с.
Результаты моделирования, представленные на фиг. 2а, показали, что полет самолета при первоначальном угле на ИИ менее 4-5° приводит к значительному повышению ошибок определения дальности до ИИ. Это связано с тем, что угол  практически не меняется, а достаточно большие ошибки определения пеленга «раскачивают» фильтр Винера. Оценки относительной погрешности определения дальности до ИИ при первоначальном угле между направлением полета самолета и направлением на источник излучения 5°, приведенные на фиг. 2б, показали лучшие по сравнению со способом-прототипом показатели. Так относительная погрешность определения дальности до ИИ (σD/D) в предложенном способе составляет 11-12%, а в способе-прототипе - 17%, где σD - среднеквадратическая ошибки определения дальности. При этом ошибка измерения угла крена σγ может достигать 1°, а относительная ошибка измерения высоты полета самолета (σH/H) - 1%.
практически не меняется, а достаточно большие ошибки определения пеленга «раскачивают» фильтр Винера. Оценки относительной погрешности определения дальности до ИИ при первоначальном угле между направлением полета самолета и направлением на источник излучения 5°, приведенные на фиг. 2б, показали лучшие по сравнению со способом-прототипом показатели. Так относительная погрешность определения дальности до ИИ (σD/D) в предложенном способе составляет 11-12%, а в способе-прототипе - 17%, где σD - среднеквадратическая ошибки определения дальности. При этом ошибка измерения угла крена σγ может достигать 1°, а относительная ошибка измерения высоты полета самолета (σH/H) - 1%.
Таким образом, заявленный способ определения дальности до наземного источника излучения с самолета, оснащенного азимутальным фазовым пеленгатором, обеспечивает повышение точности определения дальности до источника излучения за счет использования рекуррентного фильтра Винера для оценки поступающих от фазового пеленгатора измерений пеленгов на источник излучения и дополнительной фильтрации с помощью рекуррентного фильтра нижних частот рассчитанных данных о дальности до источника излучения для устранения высокочастотных шумовых составляющих, а также учета времени, необходимого для выполнения крена самолета. Кроме того, простота указанных фильтров позволяет практически реализовать их в бортовой аппаратуре беспилотного летательного аппарата с ограниченными массогабаритными характеристиками, то есть в небольших беспилотных аппаратах.
до источника излучения за счет использования рекуррентного фильтра Винера для оценки поступающих от фазового пеленгатора измерений пеленгов на источник излучения и дополнительной фильтрации с помощью рекуррентного фильтра нижних частот рассчитанных данных о дальности до источника излучения для устранения высокочастотных шумовых составляющих, а также учета времени, необходимого для выполнения крена самолета. Дополнительным техническим результатом является то, что простота указанных фильтров позволяет практически реализовать их в бортовой аппаратуре беспилотного летательного аппарата с ограниченными массогабаритными характеристиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ С САМОЛЕТА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2809745C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ С БОРТА САМОЛЕТА | 2021 |
|
RU2777147C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2760975C1 |
| Способ определения дальности до неподвижного источника излучения движущимся пеленгатором | 2016 |
|
RU2617447C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КОПТЕРЕ | 2024 |
|
RU2841365C1 |
| Способ определения расстояния до неподвижного источника излучения движущимся пеленгатором | 2016 |
|
RU2617210C1 |
| КИНЕМАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА ИЗЛУЧЕНИЯ | 2023 |
|
RU2825200C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ ТРИАНГУЛЯЦИОННЫМ МЕТОДОМ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2834975C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПРИ ОДНОКООРДИНАТНОЙ ПЕЛЕНГАЦИИ В СВЯЗАННОЙ СИСТЕМЕ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2834277C1 |
Изобретение относится к методам определения дальности до источника излучения (ИИ) угломерным способом с использованием фазового пеленгатора, размещенного на борту самолета, выполняющего полет в сторону источника излучения. Техническим результатом является повышение точности определения дальности до источника излучения. Способ определения дальности до наземного источника излучения с самолета, оснащенного азимутальным фазовым пеленгатором, заключается в обнаружении источника излучения, в полете в сторону источника излучения, в определении текущей высоты полета самолета, в измерении с помощью пеленгатора углов на источник излучения при отсутствии и после выполнения крена, измерении угла крена и расчете с использованием полученных данных дальности до источника излучения. Точность определения дальности до источника излучения обеспечивается за счет использования рекуррентного фильтра Винера для оценки поступающих от фазового пеленгатора измерений пеленгов на источник излучения и дополнительной фильтрации с помощью рекуррентного фильтра нижних частот рассчитанных данных о дальности до источника излучения для устранения высокочастотных шумовых составляющих, а также учета времени, необходимого для выполнения крена самолета. Кроме того, простота указанных фильтров позволяет практически реализовать их в бортовой аппаратуре беспилотного летательного аппарата с ограниченными массогабаритными характеристиками, то есть в небольших беспилотных аппаратах. 3 ил.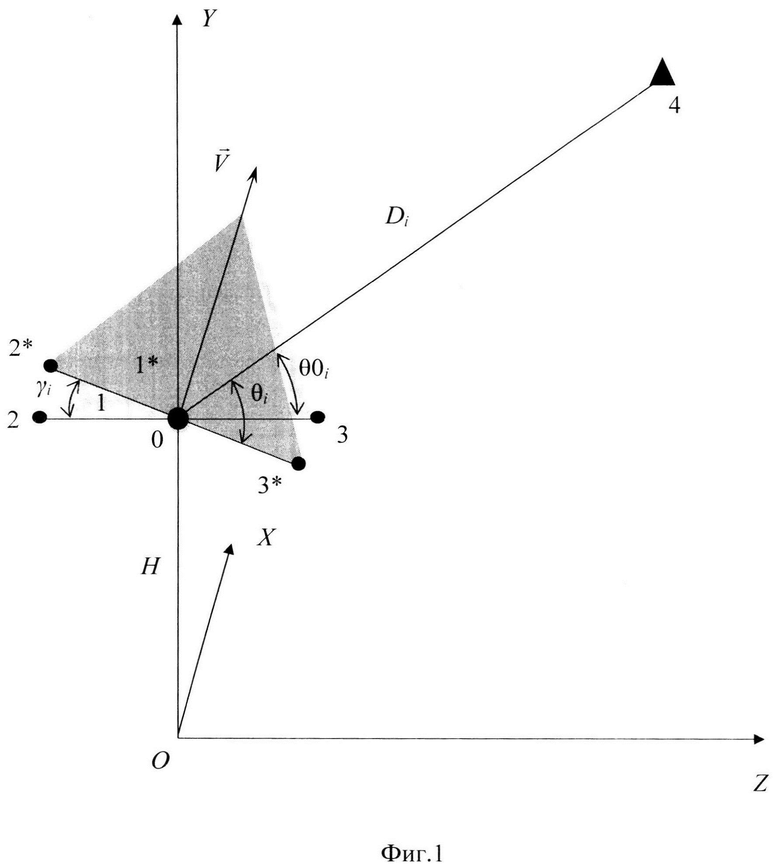
Способ определения дальности до наземного источника излучения с самолета, оснащенного азимутальным фазовым пеленгатором, антенны которого размещены на законцовках крыла, заключающийся в обнаружении источника излучения, в полете в сторону источника излучения, в определении текущей высоты полета самолета, в измерении с помощью пеленгатора углов на источник излучения при отсутствии и после выполнения крена, измерении угла крена и в расчете с использованием полученных данных дальности до источника излучения, отличающийся тем, что
после измерения угла на источник излучения направляют самолет в его сторону таким образом, чтобы при горизонтальном полете угол между направлением полета самолета и пеленгом на источник излучения был не меньше 5°,
продолжают полет в горизонтальной плоскости с постоянным курсом, совершая последовательные маневры в виде крена в разные стороны,
при этом дискретно по времени на каждом i-ом шаге одновременно измеряют угол крена самолета и угол на источник излучения,
пересчитывают угол на источник излучения в предположении, что угол крена самолета равен нулю, по формуле  , где γi, θi - измеренные угол крена самолета и угол с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора; Н - высота полета самолета;
, где γi, θi - измеренные угол крена самолета и угол с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора; Н - высота полета самолета;  - отфильтрованное на предыдущем шаге фильтром нижних частот значение дальности до источника излучения и прогнозируемое ее приращение
- отфильтрованное на предыдущем шаге фильтром нижних частот значение дальности до источника излучения и прогнозируемое ее приращение  ,
,
проводят оценку пересчитанного угла по рекуррентной формуле Винера  , где
, где  - оценка пересчитанного угла на предыдущем шаге и прогнозируемое ее приращение
- оценка пересчитанного угла на предыдущем шаге и прогнозируемое ее приращение  ;
;  - коэффициент передачи фильтра Винера, σα - среднеквадратическая ошибка измерения пеленга на источник излучения, σξ - среднеквадратическое отклонение состояния системы,
- коэффициент передачи фильтра Винера, σα - среднеквадратическая ошибка измерения пеленга на источник излучения, σξ - среднеквадратическое отклонение состояния системы,
рассчитывают дальность до источника излучения по формуле  и осуществляют ее фильтрацию с использованием фильтра нижних частот по формуле
и осуществляют ее фильтрацию с использованием фильтра нижних частот по формуле  , где Di-1 - рассчитанная на предыдущем шаге дальность до источника излучения, Т - постоянная времени фильтра нижних частот, Δt - шаг дискретизации.
, где Di-1 - рассчитанная на предыдущем шаге дальность до источника излучения, Т - постоянная времени фильтра нижних частот, Δt - шаг дискретизации.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2760975C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| Способ определения дальности до неподвижного источника излучения движущимся пеленгатором | 2016 |
|
RU2617447C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2510618C2 |
| Угломерно-корреляционный способ определения местоположения наземных источников радиоизлучения | 2021 |
|
RU2764149C1 |
| ПОТАПОВА Т.П., ТОПОРКОВ Н.В., ШАБАТУРА Ю.М | |||
| Алгоритм определения координат источников радиоизлучения с летательного аппарата на основе фазово-временной сигнальной информации от двух приемных модулей // Вестник | |||

