Предлагаемое изобретение относится к методам определения координат источника излучения (ИИ) угломерным способом с использованием фазового пеленгатора, размещенного на борту самолета, выполняющего полет в сторону источника излучения.
При применении фазового метода пеленгации в одной плоскости (одномерного пеленгования) необходимы минимум две слабонаправленные антенны малых размеров, разнесенные на расстояние d, называемое базой. При этом среднеквадратическая ошибка измерения угла σα = λ/(2πd⋅cos(α) q0.5) пропорциональна отношению (λ/d), где α - угол между нормалью к базе и направлением принимаемого излучения, λ - длина волны излучения, q - отношение сигнал/шум [Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. М.: Сов. радио, 1975. 336 с: ил., стр. 91-93]. Требуемая точность в этом случае достигается за счет увеличения разноса антенн фазового пеленгатора, то есть увеличения базы d. В азимутальной плоскости это может быть достигнуто за счет размещения антенн пеленгатора, например, на законцовках крыла летательного аппарата. В угломестной плоскости разнести антенны практически невозможно.
Наиболее близким по сущности и достигаемому эффекту (прототипом) предлагаемого способа является способ определения координат наземного источника излучения с помощью фазового пеленгатора, размещенного на борту самолета, антенны которого установлены на законцовках крыла [Патент РФ на изобретение №2760975 «Способ определения местоположения источника излучения с борта летательного аппарата», опубликовано 02.12.2021, бюл. 34. МПК G01S 11/02, G01S 3/46, G01S 5/04]. Способ основан на последовательном измерении с помощью бортового фазового пеленгатора углов на ИИ с борта самолета, выполняющего горизонтальный полет в сторону ИИ, при отсутствии крена самолета и после выполнения крена, расчете дальности до ИИ с учетом знания высоты полета и угла крена по формуле  где Н, γ - высота полета и угол крена самолета; θ0, θ - углы с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при полете самолета без крена и с креном, соответственно.
где Н, γ - высота полета и угол крена самолета; θ0, θ - углы с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при полете самолета без крена и с креном, соответственно.
Известно устройство реализации данного способа-прототипа [там же], содержащий фазовый пеленгатор, измеритель крена самолета, измеритель высоты самолета и запоминающее устройство, выходы которых соответственно подключены к входам 1, 2, 3, 4 вычислителя дальности, при этом выход фазового пеленгатора дополнительно соединен со входом запоминающего устройства.
Недостатком способа и устройства его реализации является низкая точность определения координат источника излучения, что связано с малым изменением угла на ИИ относительно правой антенны фазового пеленгатора при выполнении самолетом крена на больших дальностях до ИИ и недостаточной точностью определения пеленгатором углов на ИИ.
Техническим результатом изобретения является повышение точности определения координат источника излучения с борта самолета за счет последовательного выполнения самолетом кренов в разные стороны при горизонтальном полете и использования рекуррентных фильтров Калмана для оценки поступающих от фазового пеленгатора измеренных углов на источник излучения отдельно для левого, правого и нулевого кренов самолета и оценки рассчитанных значений дальности до источника излучения.
Указанный результат достигается тем, что в известном способе определения координат наземного источника излучения с борта самолета, основанном на обнаружении источника излучения, осуществлении горизонтального полета в его сторону, определении текущей высоты полета самолета, измерении пеленга на источник излучения с помощью фазового пеленгатора, антенны которого размещены на законцовках крыла, выполнении крена самолета и измерении угла крена и пеленга на источник излучения, выравнивания самолета и расчете с использованием полученных данных дальности до источника излучения, согласно изобретению
продолжают горизонтальный полет самолета с постоянным курсом и совершают последовательно маневры самолета в виде крена в разные стороны,
при этом на каждом i-ом маневре в крайних положениях крена и при нулевом крене измеряют угол на источник излучения,
осуществляют оценку углов на источник излучения с помощью рекуррентного фильтра Калмана отдельно для левого, правого и нулевого кренов самолета,
в случае нулевого крена самолета запоминают значение оцененного угла на источник излучения и рассчитывают приближенно дальность до источника излучения по формуле  где
где  - оценка угла на источник излучения при нулевом крене с вершиной в середине антенной базы, отсчитываемого от направления на правую антенну; V - скорость самолета; Δt - время выполнения крена;
- оценка угла на источник излучения при нулевом крене с вершиной в середине антенной базы, отсчитываемого от направления на правую антенну; V - скорость самолета; Δt - время выполнения крена;  - оценка дальности до источника излучения, полученная на предыдущем i-1 -ом маневре самолета, в случае ненулевого крена с использованием полученной оценки угла на источник излучения
- оценка дальности до источника излучения, полученная на предыдущем i-1 -ом маневре самолета, в случае ненулевого крена с использованием полученной оценки угла на источник излучения  рассчитывают дальность до него по формуле
рассчитывают дальность до него по формуле  где Н,
где Н,  - высота полета и угол крена самолета, проводят оценку рассчитанной дальности до источника излучения с помощью рекуррентного фильтра Калмана, при этом первым четырем начальным значениям оценки угла на источник излучения, соответствующие последовательно нулевому, левому (правому), нулевому и правому (левому) кренам самолета, присваивают измеренные фазовым пеленгатором углы на источник излучения, а начальному значению оценки дальности - первую рассчитанную дальность до источника излучения при ненулевом крене, по оценке угла на источник излучения при отсутствии крена самолета и оценке дальности до источника излучения определяют координаты источника излучения относительно самолета.
- высота полета и угол крена самолета, проводят оценку рассчитанной дальности до источника излучения с помощью рекуррентного фильтра Калмана, при этом первым четырем начальным значениям оценки угла на источник излучения, соответствующие последовательно нулевому, левому (правому), нулевому и правому (левому) кренам самолета, присваивают измеренные фазовым пеленгатором углы на источник излучения, а начальному значению оценки дальности - первую рассчитанную дальность до источника излучения при ненулевом крене, по оценке угла на источник излучения при отсутствии крена самолета и оценке дальности до источника излучения определяют координаты источника излучения относительно самолета.
Указанный результат достигается тем, что в устройство реализации способа определения координат наземного источника излучения с самолета, содержащее
фазовый пеленгатор (ФП), измеритель крена самолета (ИК), измеритель высоты самолета (ИВ), запоминающее устройство (ЗУ) и вычислитель дальности (ВД),
при этом
выходы ЗУ, ФП, ИВ, ИК подключены к входам 1, 2, 3, 4 ВД соответственно, а выход ФП дополнительно соединен со входом ЗУ,
дополнительно введены
синхронизатор (Синх), измеритель скорости самолета (ИС), блок сравнения (БС), блок ввода данных (БВД), рекуррентный фильтр Калмана оценки угла (РФК ОУ), рекуррентный фильтр Калмана оценки дальности (РФК ОД), вычислитель дальности при нулевом крене (ВД НК),
при этом
РФК ОУ установлен в разрыв между ФП и ЗУ, первый выход Синх соединен с первым входом БВД, а второй выход - с входами ИС, ФП, ИК, ИВ и со вторым входом БВД, первый и второй выходы которого подключены ко второму и третьему входам РФК ОУ соответственно, а третий и четвертый выходы - ко второму и третьему входам РФК ОД соответственно, причем первый вход РФК ОУ соединен с выходом ФП, четвертый вход - с выходом ИК, входом БС и вторым входом ВД, а выход - ко второму входу ЗУ и к пятому входу ВД, первый вход которого соединен с выходом ИВ, третий вход - со вторым выходом БС, а четвертый вход - с четвертым входом ВД НК и с выходом ЗУ, первый вход которого подключен к первому выходу БС и к первому входу ВД НК, второй вход которого соединен с выходом ИС, а третий вход - с третьим входом БВД и с выходом РФК ОД, первый вход которого подключен к выходам ВД НК и ВД, причем выход РФК ОД соединен с первым выходом устройства, а выход ЗУ - со вторым выходом устройства.
Сущность изобретения заключается в следующем.
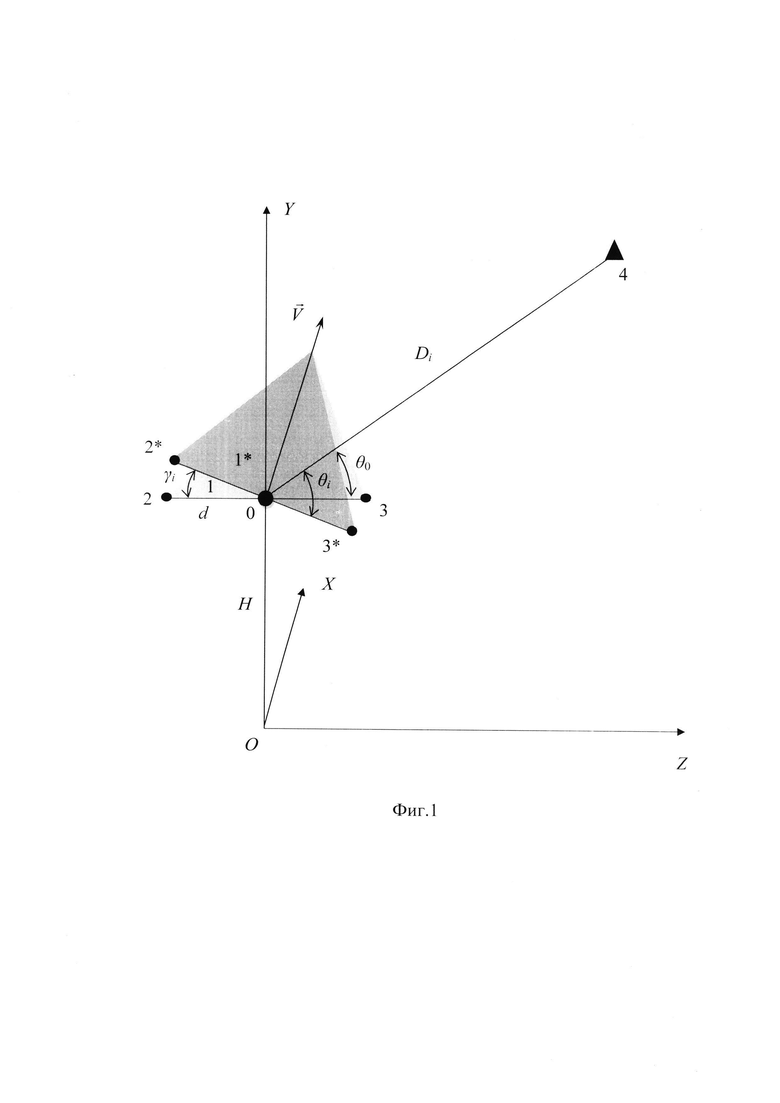
На фиг.1 представлено взаимное расположение самолета и источника излучения в пространстве. На фиг.1 обозначены: 0 - местоположение самолета на i-ом шаге измерений, которое соответствует середине антенной базы пеленгатора; 1* - плоскость самолета с углом кренаγi; 1 - плоскость самолета с углом крена равном нулю; 2*, 3* (2, 3) - положение левой и правой антенн фазового пеленгатора при крене самолета (при нулевом крене); 4 - источник излучения; OXYZ - декартова система координат;  - вектор скорости самолета; Н - высота полета самолета; Di - расстояние от самолета до ИИ; θi - угол на ИИ относительно правой антенны фазового пеленгатора.
- вектор скорости самолета; Н - высота полета самолета; Di - расстояние от самолета до ИИ; θi - угол на ИИ относительно правой антенны фазового пеленгатора.
Как видно из фиг.1 углы θ0 и θi на ИИ до и после выполнении крена самолета отличаются и максимальная их разница получается при больших углах крена. Для определения дальности до ИИ необходимо знание высоты полета самолета, значений углов θ0 и θi на ИИ до и после выполнения крена и самого крена γi. Однако следует отметить, что максимально возможный крен для каждого самолета свой и ограничен с учетом безопасности полета, а в данном случае еще и условием не изменения курса. В способе-прототипе дальность до источника излучения рассчитывается по формуле  [Патент РФ на изобретение №2760975 «Способ определения местоположения источника излучения с борта летательного аппарата», опубликовано 02.12.2021, бюл. 34. МПК G01S 11/02, G01S 3/46, G01S 5/04], где θi (θ0) - измеряемый угол на ИИ относительно правой антенны при наличии (отсутствии) крена самолета. Однако недостаточная точность определения фазовым пеленгатором углов на ИИ и малое изменение измеряемых углов на ИИ при выполнении крена приводят к большим погрешностям определения относительных от самолета координат ИИ, особенно при малых отношениях HID (относительная среднеквадратическая ошибка определения дальности более 20%), что может быть недопустимо для последующего визуального обнаружения ИИ. В интересах снижения ошибок измерения углов на ИИ и рассчитанных дальностей до ИИ предложено использовать рекуррентные фильтры Калмана [Оценка характеристик оптимального фильтра для слежения за пилотируемой целью. Зингер Р.А. Зарубежная радиоэлектроника, №8, 1971, с. 40-57]. При этом особенностью фильтрации измеренных углов на ИИ в способе является то, что оценку углов осуществляют с помощью рекуррентного фильтра Калмана отдельно при одинаковых кренах самолета. Это связано с тем, что угол крена при последовательных кренах самолета в разные стороны изменяется по синусоидальному закону и, соответственно, по такому закону изменяется измеряемый пеленгатором угол на ИИ. Не учет этого приводит к «раскачиванию» фильтра Калмана. Также особенностью фильтрации дальности до ИИ является то, что для оценки используют:
[Патент РФ на изобретение №2760975 «Способ определения местоположения источника излучения с борта летательного аппарата», опубликовано 02.12.2021, бюл. 34. МПК G01S 11/02, G01S 3/46, G01S 5/04], где θi (θ0) - измеряемый угол на ИИ относительно правой антенны при наличии (отсутствии) крена самолета. Однако недостаточная точность определения фазовым пеленгатором углов на ИИ и малое изменение измеряемых углов на ИИ при выполнении крена приводят к большим погрешностям определения относительных от самолета координат ИИ, особенно при малых отношениях HID (относительная среднеквадратическая ошибка определения дальности более 20%), что может быть недопустимо для последующего визуального обнаружения ИИ. В интересах снижения ошибок измерения углов на ИИ и рассчитанных дальностей до ИИ предложено использовать рекуррентные фильтры Калмана [Оценка характеристик оптимального фильтра для слежения за пилотируемой целью. Зингер Р.А. Зарубежная радиоэлектроника, №8, 1971, с. 40-57]. При этом особенностью фильтрации измеренных углов на ИИ в способе является то, что оценку углов осуществляют с помощью рекуррентного фильтра Калмана отдельно при одинаковых кренах самолета. Это связано с тем, что угол крена при последовательных кренах самолета в разные стороны изменяется по синусоидальному закону и, соответственно, по такому закону изменяется измеряемый пеленгатором угол на ИИ. Не учет этого приводит к «раскачиванию» фильтра Калмана. Также особенностью фильтрации дальности до ИИ является то, что для оценки используют:
1) в случае ненулевого крена самолета - рассчитанную по данным об оценке угла на ИИ  соответствующим ей значениям угла крена γi и высоты полета самолета Н дальность с помощью формулы
соответствующим ей значениям угла крена γi и высоты полета самолета Н дальность с помощью формулы

где  - ближайшая запомненная оценка угла на ИИ, когда угол крена самолета был равен нулю;
- ближайшая запомненная оценка угла на ИИ, когда угол крена самолета был равен нулю;
2) в случае нулевого крена самолета - спрогнозированную дальность до ИИ по предыдущей оценке дальности  и известной скорости самолета с учетом оценки угла на ИИ
и известной скорости самолета с учетом оценки угла на ИИ  по формуле
по формуле

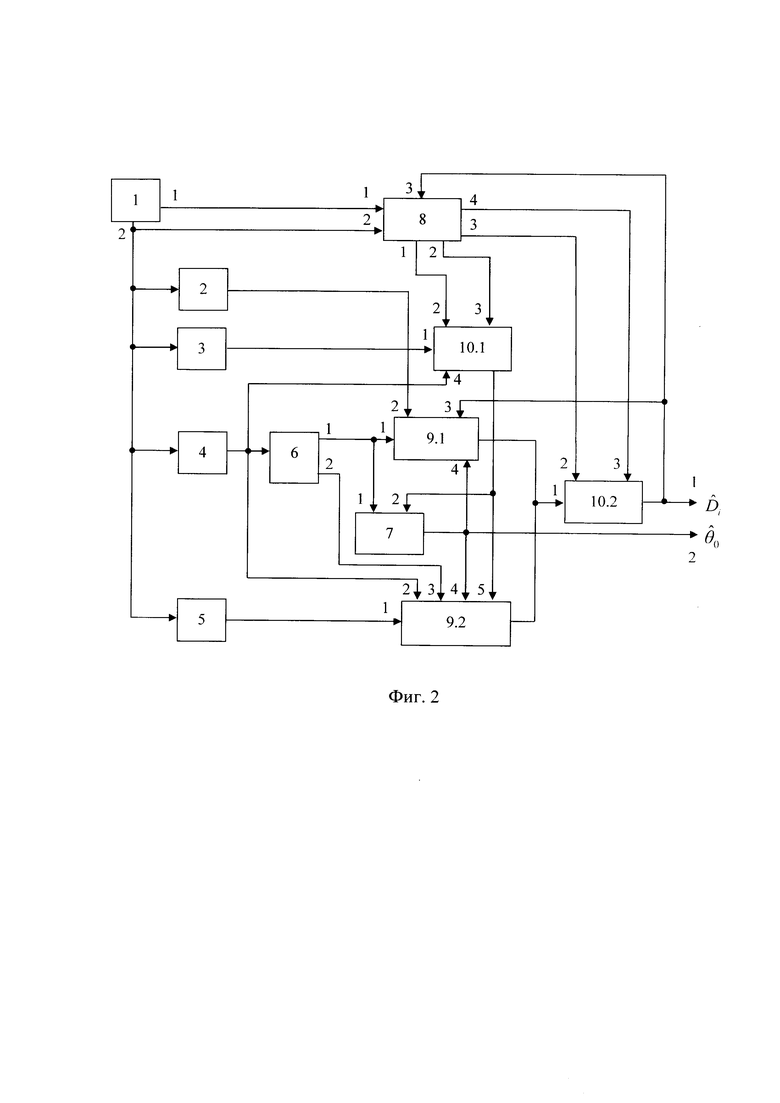
Предлагаемый способ может быть реализован, например, устройством, представленным на фиг.2, где обозначены: 1 - синхронизатор (Синх); 2 - измеритель скорости самолета (ИС); 3 - фазовый пеленгатор; 4 - измеритель крена самолета; 5 - измеритель высоты самолета; 6 - блок сравнения (БС); 7 - запоминающее устройство; 8 - блок ввода данных (БВД); 9.1 и 9.2 - вычислители дальности до ИИ при нулевом крене и при угле крена отличном от нуля, соответственно; 10.1 и 10.2 - рекуррентные фильтры Калмана (РФК) для оценки угла на ИИ и оценки дальности до ИИ, соответственно.
То есть, дополнительно к устройству-прототипу включены следующие элементы: Синх, ИС, БС, БВД, РФК и ВД при нулевом крене. Назначение элементов ясны из названия и могут быть выполнены с использованием известных, выпускаемых промышленностью, элементов. Например, блок ввода данных, вычислители дальности до ИИ, рекуррентные фильтры Калмана могут быть выполнены на микроконтроллерах (например, на микроконтроллере типа PIC16F62X) с соответствующим программным обеспечением. Синхронизатор, блок сравнения, запоминающее устройство могут быть выполнены на типовых цифровых интегральных микросхемах [Воробьев В.П., Сенин К.В. Интегральные микросхемы производства СССР и их зарубежные аналоги: Справочник. - М.: Радио и связь, 1990], [Вениаминов В.Н., Лебедев О.Н., Мирошниченко А.И. Микросхемы и их применение: Справ, пособие. - 3-е изд. перераб. и доп. - М.: Радио и связь, 1989, 240 с.: и л. - (Массовая радиобиблиотека; вып.1143)]. Скорость, высота и крен самолета могут быть определены с использованием штатных бортовых устройств [Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. 399 с: ил., стр. 239-260]. Например, в качестве датчика крена может быть применена гировертикаль, высотомера - барометрический высотомер, скорости - указатели истинной воздушной скорости и числа М.
Синхронизатор предназначен для запуска работы устройства и синхронизации выдачи данных (дискретизации) с датчиков самолета, т.е. с фазового пеленгатора и бортовых измерителей скорости, крена и высоты самолета.
Измеритель скорости самолета определяет текущую скорость самолета, необходимую для прогноза дальности в вычислителе ВД 9.1.
Блок сравнения предназначено для определения моментов времени, когда угол крена самолета равен нулю, управления запоминающим устройством и запуска соответствующего вычислителя дальности.
Блок ввода данных предназначен для оперативного ввода необходимых данных, хранения и расчета данных для рекуррентных фильтров Калмана.
Рекуррентные фильтры Калмана служат для оценки (фильтрации) значений измеренных углов на ИИ относительно самолета и рассчитанных дальностей до ИИ.
Вычислитель дальности при нулевом крене со специальным программным обеспечением служит для расчета (прогноза) дальности по формуле (2).
Устройство реализации предлагаемого способа определения координат наземного источника излучения с самолета работает следующим способом.
При обнаружении ИИ (пеленгации фазовым пеленгатором ИИ), с выхода 1 Синх 1 подают команду на вход 1 БВД 8 для запуска работы устройства и ввода данных о маневренных свойствах самолета, дисперсии ошибок единичного измерения угла  и дальности
и дальности  для расчета начальных корреляционных матриц ошибок фильтрации
для расчета начальных корреляционных матриц ошибок фильтрации  и шумов состояния системы (qθ и qD). При этом дополнительно значения
и шумов состояния системы (qθ и qD). При этом дополнительно значения  с выходов 1 и 3 БВД 8 подают на входы 2 РФК 10.1 и РФК 10.2, соответственно, в которых они запоминаются.
с выходов 1 и 3 БВД 8 подают на входы 2 РФК 10.1 и РФК 10.2, соответственно, в которых они запоминаются.
Далее рассмотрим работу устройства при каждом маневре самолета (такте). При этом под тактом подразумевается изменение угла крена самолета и появление сигнала на выходе 2 Синх 1.
На первом такте (горизонтальный полет при нулевом крене самолета) с выхода 2 Синх 1 подают тактовый сигнал на входы ИС 2, ФП 3, ИК 4, ИВ 5 и на вход 2 БВД 8. При этом с измерителей начинают поступать следующие данные: скорость самолета - с выхода ИС 2 на вход 2 ВД 9.1; угол на ИИ - с выхода ФП 3 на вход 1 РФК 10.1; угол крена - с выхода ИК 4 на вход БС 6, вход 2 ВД 9.2 и вход 4 РФК 10.1; высота самолета - с выхода ИВ 5 на вход 1 ВД 9.2. С выходов 1 и 3 БВД 8 рассчитанные начальные корреляционные матрицы ошибок фильтрации  подают на входы 2 РФК 10.1 и РФК 10.2, соответственно, а рассчитанные шумы состояния системы
подают на входы 2 РФК 10.1 и РФК 10.2, соответственно, а рассчитанные шумы состояния системы  с выходов 2 и 4 БВД 8 - на входы 3 РФК 10.1 и РФК 10.2, соответственно.
с выходов 2 и 4 БВД 8 - на входы 3 РФК 10.1 и РФК 10.2, соответственно.
В блоке сравнения БС 6 проверяют выполнение условия, что текущий крен самолета равен нулю γi = 0. Если это условие выполняется, то с выхода 1 БС 6 сигнал высокого уровня на входе 1 ЗУ 7 разрешает в него запись оценки угла на ИИ, поступающий на вход 2 с выхода РФК 10.1, а на входе 1 ВД 9.1 должен запустить его для расчета по формуле (2) дальности до ИИ, но этого не происходит из-за отсутствия на входе 3 с выхода РФК 10.2 оценки дальности. Сигнал низкого уровня с выхода 2 БС 6 на входе 3 ВД 9.2 запрещает проводить расчеты дальности по формуле (1). На выходе ЗУ 7 и на выходе 2 устройства присутствует измеренный угол на ИИ при нулевом крене самолета.
Как отмечено выше особенностью работы устройства при первых четырех тактах является то, что в РФК 10.1 оценка угла на ИИ не осуществляется, а оценке на каждом такте, соответствующем своему углу крена, присваиваются поступающие с ФП 3 на вход 1 измеренные углы на ИИ. Также на первом такте оценка дальности до ИИ в РФК 10.2 не осуществляется из-за отсутствия сигналов на выходах ВД 9.1 и ВД 9.2, а на втором такте оценке дальности присваивается поступающее с ВД 9.2 первое рассчитанное значение дальности до ИИ.
На втором такте осуществляют крен самолета (например, влево), с выхода 2 Синх 1 подают второй тактовый сигнал на соответствующие входы элементов устройства. Устройство работает аналогично первому такту за исключением того, что в блоке сравнения БС 6 при проверке выполнение условия, что текущий крен самолета равен нулю γi = 0, он не выполняется. С выхода 1 БС 6 сигнал низкого уровня на входе 1 ЗУ 7 запрещает запись в него сигнала, присутствующего на входе 2 с выхода РФК 10.1, а на входе 1 ВД 9.1 - выполнять ему расчеты. Сигнал высокого уровня с выхода 2 БС 6 на входе 3 ВД 9.2 запускает его для выполнения расчета дальности до ИИ по формуле (1) по данным о высоте полета самолета на входе 1 с выхода ИВ 5, крена самолета на входе 2 с выхода ИК 4, значения угла на ИИ при нулевом крене на входе 4 с выхода ЗУ 7 и оценке угла на ИИ (при текущем, не равном нулю крене самолета) на входе 5 с выхода РФК 10.1. Рассчитанное значение дальности с выхода ВД 9.2 поступает на вход 1 РФК 10.2 для оценки дальности до ИИ. Однако, как сказано выше, на втором такте оценка не осуществляется, а оценке дальности присваивается рассчитанное в ВД 9.2 значение дальности. На выхода РФК 10.2 появляется оценка дальности, которую подают на вход 3 УВ 8 для уточнения шума состояния системы  на вход 3 ВД 9.1 - для расчета (прогноза) дальности по формуле (2) и на выход 1 устройства.
на вход 3 ВД 9.1 - для расчета (прогноза) дальности по формуле (2) и на выход 1 устройства.
На третьем такте выравнивают самолет в горизонтальной плоскости, с выхода 2 Синх 1 подают третий тактовый сигнал на соответствующие входы элементов устройства. Устройство работает аналогично первому такту за исключением того, что наличие оценки дальности с выхода РФК 10.2 на входе 3 ВД 9.1 позволяет ему проводить расчет дальности до ИИ по формуле (2). Наличие сигнала на выходе ВД 9.1 и, соответственно, на входе 1 РФК 10.2, а также данных с БВД 8 о начальной корреляционной матрице ошибок фильтрации  на входе 2 РФК 10.2, шума состояния системы
на входе 2 РФК 10.2, шума состояния системы  на входе 3 РФК 10.2, а также запомненных ранее в РФК 10.2 (при запуске устройства) дисперсии ошибки измерения дальности
на входе 3 РФК 10.2, а также запомненных ранее в РФК 10.2 (при запуске устройства) дисперсии ошибки измерения дальности  и предыдущей оценки дальности, также запомненная в РФК 10.2 с предыдущего такта, позволяют начать полноценную работу фильтра Калмана и осуществлять оценку дальности до ИИ.
и предыдущей оценки дальности, также запомненная в РФК 10.2 с предыдущего такта, позволяют начать полноценную работу фильтра Калмана и осуществлять оценку дальности до ИИ.
На четвертом такте осуществляют крен самолета в другую (Например, вправо), чем во втором такте, сторону, с выхода 2 Синх 1 подают четвертый тактовый сигнал на соответствующие входы элементов устройства. Устройство работает аналогично второму такту за исключением того, что по имеющимся данным на входах РФК 10.2 осуществляется полноценная оценка дальности до ИИ.
На пятом такте выравнивают самолет в горизонтальной плоскости, с выхода 2 Синх 1 подают пятый тактовый сигнал на соответствующие входы элементов устройства. Устройство работает аналогично третьему такту, но, так как значение угла крена начинает повторяться, то осуществляют полноценную оценку угла на ИИ. А именно наличие измеренного угла на источник излучения с выхода ФП 3 на входе 1 РФК 10.1, данных с БВД 8 о начальной корреляционной матрице ошибок фильтрации  на входе 2 РФК 10.1, шума состояния системы
на входе 2 РФК 10.1, шума состояния системы  на входе 3 РФК 10.1, а также запомненных ранее (при запуске устройства) дисперсии ошибки измерения угла
на входе 3 РФК 10.1, а также запомненных ранее (при запуске устройства) дисперсии ошибки измерения угла  и предыдущей оценки угла на ИИ для соответствующего ей угла крена (в данном случае полученная на первом такте) позволяют РФК 10.1 осуществлять оценку угла на источник излучения. Устройство начинает работать полноценно, выдавая с выхода 1 оценку дальности до источника излучения, а с выхода 2 - оценку угла на него при нулевом крене самолета.
и предыдущей оценки угла на ИИ для соответствующего ей угла крена (в данном случае полученная на первом такте) позволяют РФК 10.1 осуществлять оценку угла на источник излучения. Устройство начинает работать полноценно, выдавая с выхода 1 оценку дальности до источника излучения, а с выхода 2 - оценку угла на него при нулевом крене самолета.
На следующих тактах работа устройства аналогична. При этом оценку углов осуществляют отдельно для левого, правого и нулевого кренов самолета для нормальной работы фильтра Калмана. Для оценки в случае ненулевого крена самолета используют рассчитанную в ВД 9.2 по формуле (2), а при нулевом крене - спрогнозированную в ВД 9.1 по формуле (1) дальность до ИИ.
Описание работы фильтра Калмана подробно рассмотрена в работе [Оценка характеристик оптимального фильтра для слежения за пилотируемой целью. Зингер Р.А. Зарубежная радиоэлектроника, №8, 1971, с. 40-57]. Применение таких фильтров позволяет повысить точность определения координат ИИ при наличии шумов, соизмеримых с точностью измерителя.
Исходя из вышеизложенного для реализации способа необходимо выполнить следующие операции.
Первоначально, после обнаружения источника излучения и определения пеленга на него, направить самолет в сторону ИИ. Далее последовательно выполнять следующие операции: 1) выровнять самолет в горизонтальной плоскости уточнить угол на ИИ, высоту и скорость полета самолета; 2) выполнить крен самолета, измерить угол крена и угол на ИИ, рассчитать по формуле (1) дальность до ИИ, осуществить оценку фильтрами Калмана угла на ИИ и дальности до него; 3) выровнять самолет в горизонтальной плоскости, измерить угол крена и угол на ИИ, рассчитать по формуле (2) дальность до ИИ, осуществить оценку угла на ИИ и дальности до него; 4) выполнить крен самолета в другую сторону, измерить угол крена и угол на ИИ, рассчитать по формуле (1) дальность до ИИ, осуществить оценку угла на ИИ и дальности до него; 5) повторять операции 1) - 4).
Для сравнения способа-прототипа и предложенного способа выполнена оценка погрешности определения дальности (σD*) от самолета до ИИ и погрешности определения угла на ИИ (σθ*) после соответствующих оценок фильтрами Калмана, для чего было осуществлено имитационное моделирование полета самолета на источник излучения. При этом были приняты следующие исходные данные и допущения:
- самолет осуществляет горизонтальный полет с постоянным курсом на высоте 3 км со скоростью 100 м/с в сторону ИИ с дальности 100 км;
- при выполнении полета с шагом Δt = 1c последовательно изменяется угол крена самолета на 45° и измеряется угол на ИИ θi. При этом угол крена в зависимости от i-го шага принимает последовательно значения {-45°, 0, 45°};
- погрешность единичного измерения угла на ИИ фазовым пеленгатором составляет σθ = 0,5°.
Дополнительно для определения начальных корреляционных матриц ошибок фильтрации (Р0θ и P0D) и шумов состояния системы {qθ и qD), необходимых для работы фильтров Калмана [Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. 399 с: ил., стр. 239-260], были приняты следующие исходные данные и допущения:
- максимальная перегрузка самолета n = 2;
- максимально возможное ускорение самолета 9,8⋅n;
- вероятность максимального ускорения P1=0,2;
- вероятность нулевого ускорения Р2=0,5;
- обратная постоянная времени маневра α=0,1.
Результаты моделирования в виде зависимостей погрешности определения (оценки) дальности от самолета до ИИ от истинной дальности до него Dист для различных курсовых углов на ИИ ξ представлены на фиг.3а), погрешности определения (оценки) угла на ИИ - на фиг.3б). Анализ результатов показывает, что изменение курсового угла (угол между вектором скорости самолета и направлением на ИИ) от 0° до 10° практически не влияет на погрешность определения дальности до ИИ. Относительная погрешность определения дальности до ИИ (σD/D) в предложенном способе не превышает 10% и составляет порядка 6-7% при относительных дальностях D/H = 20 и менее, а в способе-прототипе - до 20%. Дополнительно за счет оценки фильтром Калмана угла на ИИ погрешность определения угла снижается с 0,5° до 0,37-0,4°. При этом ошибка измерения угла крена σγ может достигать 1°, а относительная ошибка измерения высоты полета самолета σН/Н - 1%.
Варианты программ реализации фильтров Калмана для оценки угла на ИИ и оценки дальности до него, выполненные в среде математического моделирования MathCAD 14, представлены на фиг.4 а) и фиг.4б), соответственно. Приведенные здесь переменные θ_izm, θ_oz, Piθ, Qiθ соответствуют измеренному пеленгатором углу на ИИ θ, его оценке  , корреляционной матрице ошибок фильтрации Рθ и шуму состояния qθ, соответственно, а переменные D_izm, D_oz, Pi D, Qi D - рассчитанной дальности до ИИ D, ее оценке
, корреляционной матрице ошибок фильтрации Рθ и шуму состояния qθ, соответственно, а переменные D_izm, D_oz, Pi D, Qi D - рассчитанной дальности до ИИ D, ее оценке  , корреляционной матрице ошибок фильтрации PD и шуму состояния qD, соответственно, индекс jx - номер такта.
, корреляционной матрице ошибок фильтрации PD и шуму состояния qD, соответственно, индекс jx - номер такта.
Таким образом, заявленный способ определения относительных координат наземного источника излучения с самолета и устройство его реализации, обеспечивают повышение точности определения координат источника излучения с борта самолета за счет последовательного выполнения самолетом кренов в разные стороны при горизонтальном полете и использования рекуррентных фильтров Калмана для оценки поступающих от фазового пеленгатора измеренных углов на источник излучения отдельно для левого, правого и нулевого кренов самолета и оценки рассчитанных значений дальности до источника излучения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ С САМОЛЕТА, ОСНАЩЕННОГО АЗИМУТАЛЬНЫМ ФАЗОВЫМ ПЕЛЕНГАТОРОМ | 2022 |
|
RU2796121C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ С БОРТА САМОЛЕТА | 2021 |
|
RU2777147C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2760975C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КУРСА | 2023 |
|
RU2809659C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КОПТЕРЕ | 2024 |
|
RU2841365C1 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И МОНОИМПУЛЬСНАЯ РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2802886C1 |
| Способ идентификации углов рассогласования БИНС управляемого аппарата и ИНС самолета-носителя | 2022 |
|
RU2790083C1 |



Изобретение относится к методам определения координат наземного источника излучения угломерным способом с использованием фазового пеленгатора, размещенного на борту самолета, выполняющего полет в сторону источника излучения. Техническим результатом изобретения является повышение точности определения координат источника излучения с борта самолета. В заявленном способе дополнительно продолжают горизонтальный полет самолета с постоянным курсом и совершают последовательно маневры самолета в виде крена в разные стороны, при этом на каждом i-ом маневре в крайних положениях крена и при нулевом крене измеряют угол на источник излучения. Осуществляют оценку углов на источник излучения с помощью рекуррентного фильтра Калмана отдельно для левого, правого и нулевого кренов самолета. В случае нулевого крена самолета запоминают значение оцененного угла на источник излучения и рассчитывают приближенно дальность до источника излучения. В случае ненулевого крена с использованием полученной оценки угла на источник излучения рассчитывают дальность до него, проводят оценку рассчитанной дальности до источника излучения с помощью рекуррентного фильтра Калмана, при этом первым четырем начальным значениям оценки угла на источник излучения, соответствующие последовательно нулевому, левому (правому), нулевому и правому (левому) кренам самолета, присваивают измеренные фазовым пеленгатором углы на источник излучения, а начальному значению оценки дальности - первую рассчитанную дальность до источника излучения при ненулевом крене. По оценке угла на источник излучения при отсутствии крена самолета и оценке дальности до источника излучения определяют координаты источника излучения относительно самолета. Заявлено также устройство для реализации способа, содержащее фазовый пеленгатор, измеритель крена самолета, измеритель высоты самолета, запоминающее устройство и вычислитель дальности, при этом дополнительно введены синхронизатор, измеритель скорости самолета, блок сравнения, блок ввода данных, рекуррентный фильтр Калмана оценки угла, рекуррентный фильтр Калмана оценки дальности и вычислитель дальности при нулевом крене. 2 н.п. ф-лы, 6 ил.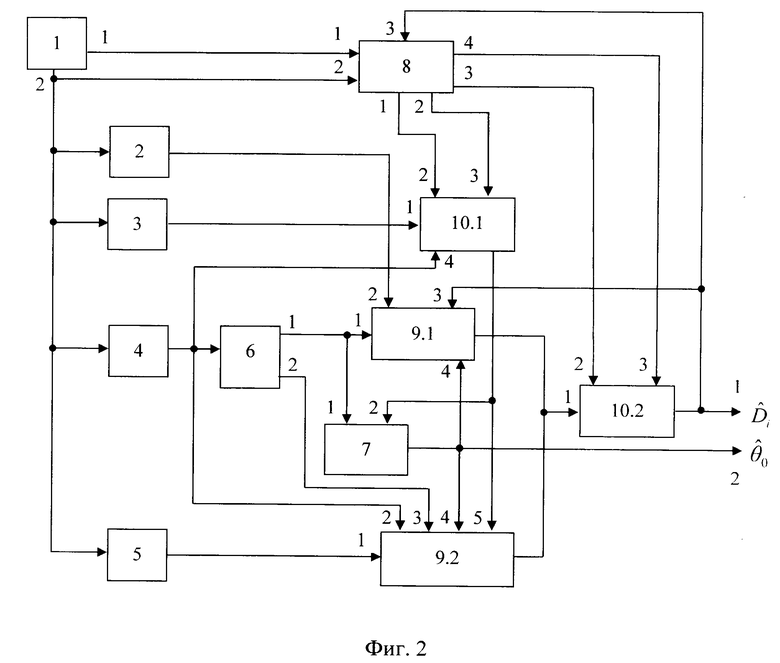
1. Способ определения координат наземного источника излучения с самолета, заключающийся в обнаружении источника излучения, осуществлении горизонтального полета в его сторону, определении текущей высоты полета самолета, измерении пеленга на источник излучения с помощью фазового пеленгатора, антенны которого размещены на законцовках крыла, выполнении крена самолета и измерении угла крена и пеленга на источник излучения, выравнивания самолета и расчете с использованием полученных данных дальности до источника излучения, отличающийся тем, что продолжают горизонтальный полет самолета с постоянным курсом и совершают последовательно маневры самолета в виде крена в разные стороны, при этом на каждом i-ом маневре в крайних положениях крена и при нулевом крене измеряют угол на источник излучения, осуществляют оценку углов на источник излучения с помощью рекуррентного фильтра Калмана отдельно для левого, правого и нулевого кренов самолета, в случае нулевого крена самолета запоминают значение оцененного угла на источник излучения и рассчитывают приближенно дальность до источника излучения по формуле 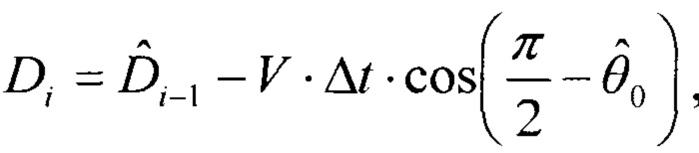 , где
, где  - оценка угла на источник излучения при нулевом крене с вершиной в середине антенной базы, отсчитываемого от направления на правую антенну; V - скорость самолета; Δt - время выполнения крена;
- оценка угла на источник излучения при нулевом крене с вершиной в середине антенной базы, отсчитываемого от направления на правую антенну; V - скорость самолета; Δt - время выполнения крена;  - оценка дальности до источника излучения, полученная на предыдущем i-1 -ом маневре самолета, в случае ненулевого крена с использованием полученной оценки угла на источник излучения
- оценка дальности до источника излучения, полученная на предыдущем i-1 -ом маневре самолета, в случае ненулевого крена с использованием полученной оценки угла на источник излучения  рассчитывают дальность до него по формуле
рассчитывают дальность до него по формуле  где H,
где H,  - высота полета и угол крена самолета, проводят оценку рассчитанной дальности до источника излучения с помощью рекуррентного фильтра Калмана, при этом первым четырем начальным значениям оценки угла на источник излучения, соответствующие последовательно нулевому, левому (правому), нулевому и правому (левому) кренам самолета, присваивают измеренные фазовым пеленгатором углы на источник излучения, а начальному значению оценки дальности – первую рассчитанную дальность до источника излучения при ненулевом крене, по оценке угла на источник излучения при отсутствии крена самолета и оценке дальности до источника излучения определяют координаты источника излучения относительно самолета.
- высота полета и угол крена самолета, проводят оценку рассчитанной дальности до источника излучения с помощью рекуррентного фильтра Калмана, при этом первым четырем начальным значениям оценки угла на источник излучения, соответствующие последовательно нулевому, левому (правому), нулевому и правому (левому) кренам самолета, присваивают измеренные фазовым пеленгатором углы на источник излучения, а начальному значению оценки дальности – первую рассчитанную дальность до источника излучения при ненулевом крене, по оценке угла на источник излучения при отсутствии крена самолета и оценке дальности до источника излучения определяют координаты источника излучения относительно самолета.
2. Устройство определения координат наземного источника излучения с самолета для реализации способа по п.1, содержащее фазовый пеленгатор, измеритель крена самолета, измеритель высоты самолета, запоминающее устройство и вычислитель дальности, при этом выходы запоминающего устройства, фазового пеленгатора, измерителя высоты самолета, измерителя крена самолета подключены к первому, второму, третьему и четвертому входам вычислителя дальности, соответственно, а выход фазового пеленгатора дополнительно соединен со входом запоминающего устройства, отличающееся тем, что в него дополнительно введены синхронизатор, измеритель скорости самолета, блок сравнения, блок ввода данных, рекуррентный фильтр Калмана оценки угла, рекуррентный фильтр Калмана оценки дальности, вычислитель дальности при нулевом крене, при этом рекуррентный фильтр Калмана оценки угла установлен в разрыв между фазовым пеленгатором и запоминающим устройством, первый выход синхронизатора соединен с первым входом блока ввода данных, а второй выход - с входами измерителя скорости самолета, фазового пеленгатора, измерителя крена самолета, измерителя высоты самолета и со вторым входом блока ввода данных, первый и второй выходы которого подключены ко второму и третьему входам рекуррентного фильтра Калмана оценки угла соответственно, а третий и четвертый выходы - ко второму и третьему входам рекуррентного фильтра Калмана оценки дальности соответственно, причем первый вход рекуррентного фильтра Калмана оценки угла соединен с выходом фазового пеленгатора, четвертый вход - с выходом измерителя крена самолета, входом блока сравнения и вторым входом вычислителя дальности, а выход - ко второму входу запоминающего устройства и к пятому входу вычислителя дальности, первый вход которого соединен с выходом измерителя высоты самолета, третий вход - со вторым выходом блока сравнения, а четвертый вход - с четвертым входом вычислителя дальности при нулевом крене и с выходом запоминающего устройства, первый вход которого подключен к первому выходу блока сравнения и к первому входу вычислителя дальности при нулевом крене, второй вход которого соединен с выходом измерителя скорости самолета, а третий вход - с третьим входом блока ввода данных и с выходом рекуррентного фильтра Калмана оценки дальности, первый вход которого подключен к выходам вычислителя дальности и вычислителя дальности при нулевом крене, причем выход рекуррентного фильтра Калмана оценки дальности соединен с первым выходом устройства, а выход запоминающего устройства - со вторым выходом устройства.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2760975C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ С БОРТА САМОЛЕТА | 2021 |
|
RU2777147C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА НОСИТЕЛЯ ПЕЛЕНГАТОРА, ОПРЕДЕЛЯЮЩЕГО МЕСТОПОЛОЖЕНИЕ ИЗЛУЧАТЕЛЯ | 2007 |
|
RU2357266C1 |
| Способ определения координат источника радиоизлучений с борта летательного аппарата по двум азимутальным пеленгам | 2016 |
|
RU2638177C1 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2695642C1 |
| АРШАКЯН А.А., МАКАРЕЦКИЙ Е.А | |||
| Определение координат подвижного источника радиоизлучения // Известия Тульского государственного университета | |||
| Технические науки | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Ч | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Сс | |||

