Предлагаемое изобретение относится к методам определения местоположения источника излучения (ИИ) с использованием фазового пеленгатора, размещенного на борту самолета, выполняющего полет в направлении источника излучения.
При применении фазового метода пеленгации в одной плоскости (одномерного пеленгования) необходимы минимум две слабонаправленные антенны малых размеров, разнесенные на расстояние d, называемое базой. При этом среднеквадратическая ошибка измерения угла σα=λ/(2πd⋅cos(α)q0,5) пропорциональна отношению (λ/d), где α - угол между нормалью к базе и направлением принимаемого излучения, q - отношение сигнал/шум [Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. М.: Сов. радио, 1975. 336 с.: ил., стр. 91-93]. Требуемая точность в этом случае достигается за счет увеличения разноса антенн фазового пеленгатора, то есть увеличения базы d, что возможно для пеленгации в азимутальной плоскости, например, путем размещения антенн на законцовках крыла летательного аппарата, но технически нереализуемо для пеленгации в угломестной плоскости.
Известен кинематический способ определения дальности до ИИ с летательного аппарата при осуществлении полета в направлении ИИ [Ю.П. Мельников, С.В. Попов. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. М.: Радиотехника, 2008. 432 с.: ил., стр. 158-163. Защита радиолокационных систем от помех. Под ред. Канащенкова А.И. и Меркулова В.И. М.: Радиотехника, 2003. 416 с.: ил., стр. 319-322]. Способ заключается в последовательном выполнении угловых маневров летательным аппаратом и нахождении дальности до объекта радиоизлучения, как отношения тангенциальной скорости пеленгатора к угловой скорости линии визирования, определяемой путем обработки результатов нескольких измерений пеленгов. Недостатками способа являются необходимость движения летательного аппарата, на котором установлен пеленгатор, с отворотом от объекта, а также длительное время выполнения нескольких этапов маневра для достижения приемлемых точностей определения дальности до источника излучения (движение по «Змейке» в направлении ИИ).
Наиболее близким по сущности и достигаемому эффекту (прототипом) является способ определения местоположения источника излучения с помощью фазового пеленгатора, размещенного на борту летательного аппарата, антенны которого установлены на законцовках крыла [Заявка на изобретение №2021104868 от 25.02.2021 г., положительное решение о выдаче патента от 16.09.2021 г.]. Способ основан на последовательном измерении пеленгов с помощью фазового пеленгатора на источник излучения и расчете дальности до него, при этом направляют летательный аппарат на источник излучения, выравнивают его в горизонтальной плоскости, измеряют угол между направлениями на источник излучения и на правую антенну с вершиной в середине антенной базы, которая параллельна поперечной оси связанной системы координат летательного аппарата, и высоту полета летательного аппарата, запоминают измеренные данные, осуществляют крен летательного аппарата, измеряют угол крена и повторно угол с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну, рассчитывают дальность до источника излучения по формуле  где Н, γ - высота полета и угол крена летательного аппарата; θ1, θ - углы с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при полете летательного аппарата в горизонтальной плоскости и плоскости с креном, соответственно. Недостатком способа является необходимость предварительного выравнивания летательного аппарата в горизонтальной плоскости.
где Н, γ - высота полета и угол крена летательного аппарата; θ1, θ - углы с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при полете летательного аппарата в горизонтальной плоскости и плоскости с креном, соответственно. Недостатком способа является необходимость предварительного выравнивания летательного аппарата в горизонтальной плоскости.
Техническим результатом изобретения является уменьшение времени определения местоположения источника излучения за счет отсутствия необходимости предварительного выравнивания самолета в горизонтальной плоскости.
Указанный результат достигается тем, что в известном способе определения местоположения источника излучения с борта самолета, основанном на полете в направлении источника излучения, измерении текущей высоты полета самолета, последовательном измерении пеленгов с помощью фазового пеленгатора, размещенного на борту летательного аппарата с установленными на законцовках крыла антеннами, на источник излучения и расчете дальности до него, согласно изобретению первоначально измеряют текущий угол крена самолета, а также угол между направлениями на источник излучения и на правую антенну с вершиной в середине антенной базы, которая параллельна поперечной оси связанной системы координат самолета, запоминают измеренные данные, осуществляют дополнительный крен самолета, повторно измеряют угол крена и угол с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну, рассчитывают дальность до источника излучения по формуле  где Н - высота полета самолета; γ1,2, θ1,2 - измеренные углы крена самолета и углы с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при первоначальном и повторном после дополнительного крена положении самолета, соответственно, а угол на источник излучения относительно самолета - по формуле
где Н - высота полета самолета; γ1,2, θ1,2 - измеренные углы крена самолета и углы с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при первоначальном и повторном после дополнительного крена положении самолета, соответственно, а угол на источник излучения относительно самолета - по формуле  где θ - угол с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при горизонтальном полете самолета.
где θ - угол с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при горизонтальном полете самолета.
Сущность изобретения поясняется фиг. 1, где представлено взаимное расположение самолета и источника излучения в пространстве. На фиг. 1 обозначены: 1 (1*), - плоскость самолета при первоначальном (повторном) измерении крена самолета; 2, 3 (2*, 3*) - левая и правая антенны фазового пеленгатора при первоначальном (повторном) измерении крена самолета; 4 - источник излучения; 5 - середина антенной базы; OXYZ - декартова система координат;  - вектор скорости самолета; Н - высота полета самолета; D - расстояние от самолета до ИИ; γ1 (γ2) - угол крена самолета при первоначальном (повторном) измерении; d - расстояние между антеннами, база; θ1 (θ2) - измеряемые углы на ИИ относительно правой антенны при первоначальном (повторном) измерении крена; θ - угол с вершиной в середине антенной базы между направлениями на ИИ и на правую антенну фазового пеленгатора при горизонтальном полете самолета.
- вектор скорости самолета; Н - высота полета самолета; D - расстояние от самолета до ИИ; γ1 (γ2) - угол крена самолета при первоначальном (повторном) измерении; d - расстояние между антеннами, база; θ1 (θ2) - измеряемые углы на ИИ относительно правой антенны при первоначальном (повторном) измерении крена; θ - угол с вершиной в середине антенной базы между направлениями на ИИ и на правую антенну фазового пеленгатора при горизонтальном полете самолета.
Для определения дальности до ИИ необходимо знание высоты полета Н самолета, значений углов на ИИ θ1 и θ2 и углов крена γ1 и γ2 до и после выполнения дополнительного крена. Однако следует отметить, что максимально возможный крен для каждого самолета свой и ограничен с учетом безопасности полета, а в данном случае еще и условием не изменения курса самолета до момента измерения угла θ2. Местоположение источника излучения (D, θ) относительно самолета рассчитывают по предлагаемым в способе формулам.
При выводе формулы расчета дальности до ИИ сделано допущение, что время, необходимое для выполнения крена, мало и расстояние между точками местонахождения самолета до и после выполнения дополнительного крена незначительно по сравнению с дальностью до источника излучения. Из способа-прототипа известно, что дальность до ИИ рассчитывается по формуле  Соответственно можно рассчитать дальность до ИИ при другом угле крена
Соответственно можно рассчитать дальность до ИИ при другом угле крена  Разрешая относительно общего угла θ получаем обобщенную формулу для определения дальности до ИИ от самолета:
Разрешая относительно общего угла θ получаем обобщенную формулу для определения дальности до ИИ от самолета:

а разрешая относительно отношения D/H- угла на ИИ:

которые не требуют предварительного выравнивания самолета в горизонтальной плоскости.
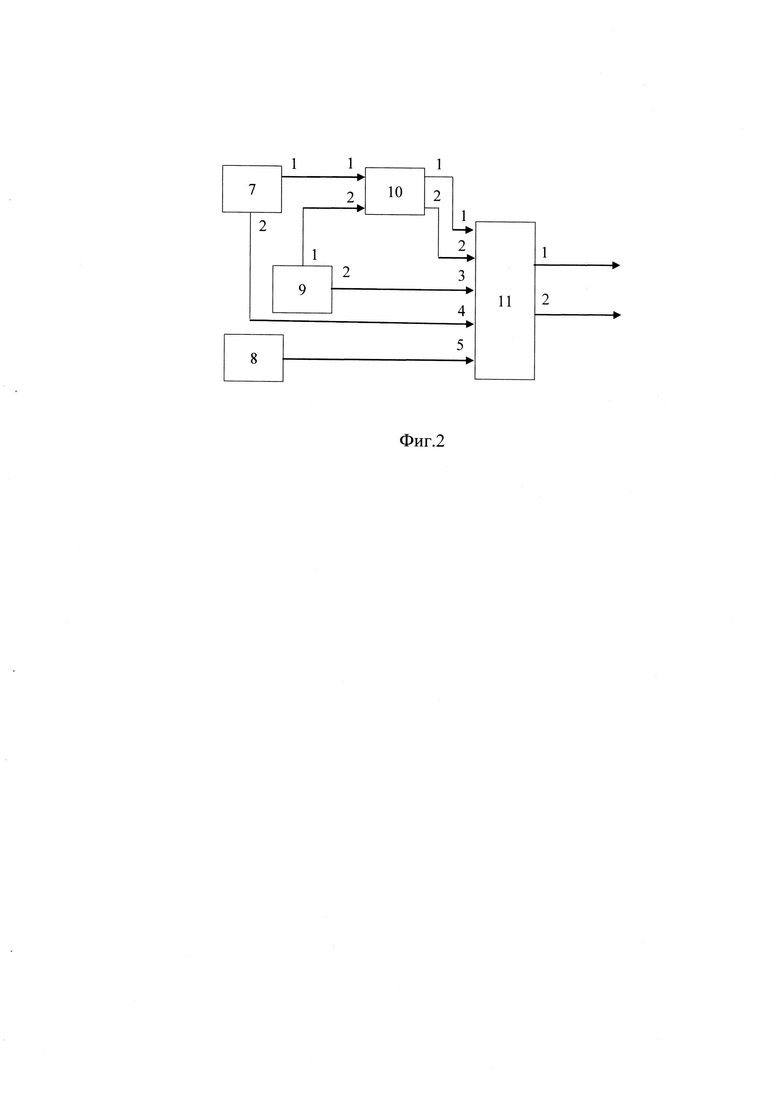
Способ может быть реализован устройством определения местоположения ИИ, например, по схеме, представленной на фиг. 2, где обозначено: 7 - фазовый пеленгатор, 8 - датчик высоты, 9 - датчик крена, 10 - запоминающее устройство, 11 - блок расчета дальности и направления на ИИ. Назначение фазового пеленгатора 7, датчиков высоты 8, крена 9 и запоминающего устройства 10 ясны из названия. Они могут быть выполнены с использованием известных устройств. Например, в качестве датчика крена может быть применена гировертикаль (см., например, Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. М.: Транспорт, 1992. 399 с.: ил., стр. 239-260.). Блок расчета дальности и направления 11 может быть выполнен на микроконтроллерах (например, на однокристальном восьмиразрядном микроконтроллере типа PIC16F62X) с программным обеспечением по формулам 1, 2.
Устройство работает следующим образом. Первоначально на вход 1 Запоминающего устройства 10 с выхода 1 Фазового пеленгатора 7 и на вход 2 с выхода 1 Датчика крена 9 записываются значения измеренных углов на ИИ относительно правой антенны (θ1) и крена самолета (γ1). После выполнения дополнительного крена в Блок расчета дальности 11 поступают данные: на вход 1 - запомненное значение угла на ИИ (θ1) с выхода 1 Запоминающего устройства 10; на вход 2 - запомненное значение угла крена (γ1) с выхода 2 Запоминающего устройства 10; на вход 3 - текущее значение измеренного угла на ИИ (θ2) с выхода 2 Фазового пеленгатора 7; на вход 4 - текущее значение измеренного угла крена (γ2) с выхода 2 Датчика крена 9; на вход 5 - высота полета самолета с Датчика высоты 8. С выхода 1 Блока расчета дальности и направления 11 выдается рассчитанная в соответствии с формулой (1) дальность до ИИ (D), а с выхода 2 - рассчитанная по формуле (2) угол на ИИ (θ).
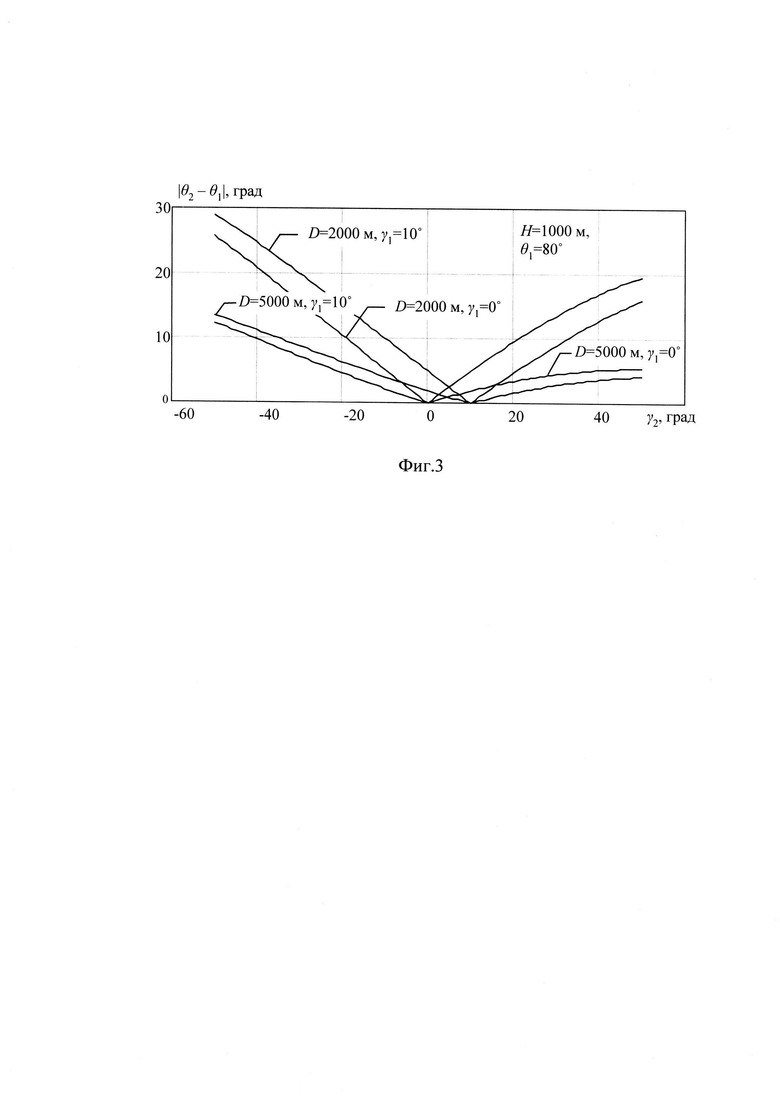
Для сравнительной оценки способа-прототипа и предложенного способа на фиг. 3 представлены графики зависимости разности углов θ2-θ1 от значения дополнительного угла крена γ2 для дальностей D=2000 м и D=5000 м, первоначальных углов крена γ1=0° (горизонтальный полет) и γ1=10° при фиксированных значениях высоты Н=1000 м и угле θ1=80° (полет в направлении ИИ). Сравнительный анализ показывает, что на больших удалениях, когда отношение Н/D<1/5, что соответствует начальному обнаружению ИИ, разность углов θ2-θ1 при первоначальных углах крена γ1=0° и γ1=10° отличаются на 1°-2°, что соизмеримо с ошибкой измерения углов пеленгатором. На малых удалениях, когда дальность до ИИ соизмерима с высотой полета самолета, в зависимости от направления совершения дополнительного крена самолетом разность углов θ2-θ1 для разных γ1 будет разная. Например, для принятых выше условий разность углов для предложенного способа будет больше (левая половина графика) или меньше (правая половина графика) по сравнению со способом-прототипом. Это значит, что отношение (θ2-θ1)/σα при совершении крена в противоположную сторону от первоначального крена для предложенного способа будет больше и точность определения дальности по сравнению со способом-прототипом будет выше, а при совершении крена в ту же сторону - наоборот меньше. Поэтому для неухудшения точности в предложенном способе рекомендуется совершать дополнительный крен в противоположную сторону от первоначального крена самолета.
В связи с тем, что не требуется предварительное выравнивание самолета в горизонтальной плоскости, выигрыш по времени в определении местоположения ИИ очевиден. Дополнительным преимуществом предложенного способа является то, что если ИИ излучает импульсные сигналы, то в способе-прототипе потребуется еще дополнительное время на ожидание прихода импульса от ИИ после выравнивания самолета в горизонтальной плоскости.
Таким образом, заявленный способ определения местоположения источника излучения с борта самолета обеспечивает уменьшение времени определения местоположения источника излучения за счет отсутствия необходимости предварительного выравнивания самолета в горизонтальной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2760975C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ С САМОЛЕТА, ОСНАЩЕННОГО АЗИМУТАЛЬНЫМ ФАЗОВЫМ ПЕЛЕНГАТОРОМ | 2022 |
|
RU2796121C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ С САМОЛЕТА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2809745C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КОПТЕРЕ | 2024 |
|
RU2841365C1 |
| КИНЕМАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКА ИЗЛУЧЕНИЯ | 2023 |
|
RU2825200C1 |
| АКТИВНЫЙ МАЛОБАЗОВЫЙ КОРРЕЛЯЦИОННО-ФАЗОВЫЙ ПЕЛЕНГАТОР | 2020 |
|
RU2740779C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ ТРИАНГУЛЯЦИОННЫМ МЕТОДОМ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2834975C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КВАДРОКОПТЕРЕ | 2021 |
|
RU2792039C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПРИ ОДНОКООРДИНАТНОЙ ПЕЛЕНГАЦИИ В СВЯЗАННОЙ СИСТЕМЕ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2834277C1 |
| Многофункциональный комплекс средств обнаружения, сопровождения и радиопротиводействия применению беспилотных летательных аппаратов малого класса | 2020 |
|
RU2769037C2 |
Изобретение относится к способу определения местоположения источника излучения с борта самолета. Для определения местоположения размещают на борту летательного аппарата фазовый пеленгатор, устанавливают на законцовках крыльев антенны, первоначально измеряют текущий угол крена самолета, а также угол между направлениями на источник излучения и на правую антенну с вершиной в середине антенной базы, которая параллельна поперечной оси связанной системы координат самолета, запоминают измеренные данные, осуществляют дополнительный крен самолета, повторно измеряют угол крена и угол с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну, рассчитывают дальность до источника излучения определенным образом. Обеспечивается уменьшение времени определения местоположения источника излучения. 3 ил.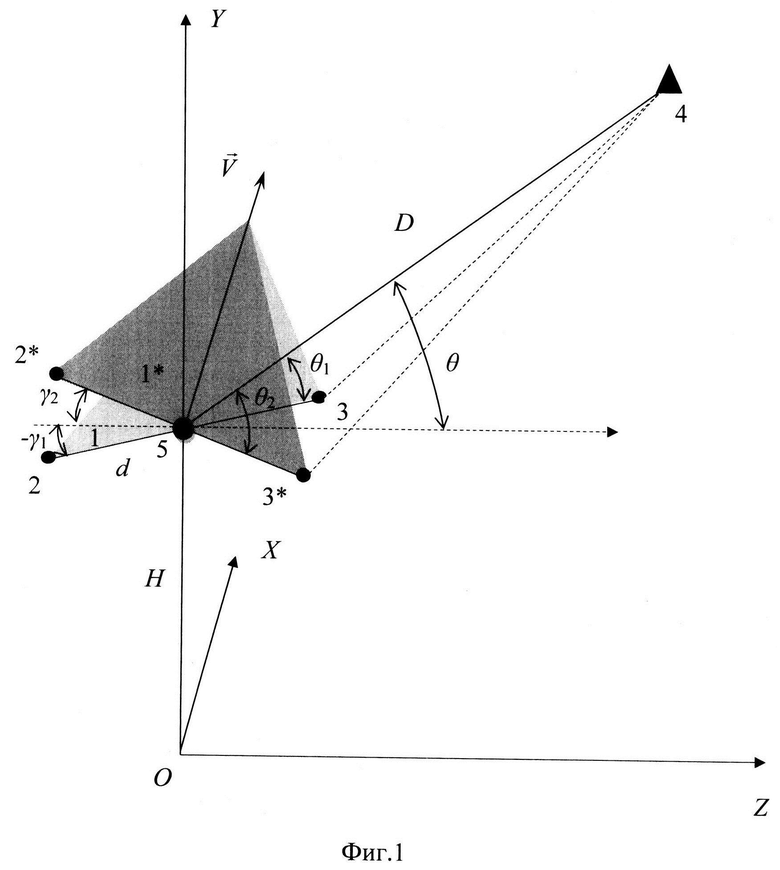
Способ определения местоположения источника излучения с борта самолета, основанный на последовательном измерении пеленгов с помощью фазового пеленгатора, размещенного на борту летательного аппарата с установленными на законцовках крыла антеннами, на источник излучения и расчете дальности до него, отличающийся тем, что первоначально измеряют текущий угол крена самолета, а также угол между направлениями на источник излучения и на правую антенну с вершиной в середине антенной базы, которая параллельна поперечной оси связанной системы координат самолета, запоминают измеренные данные, осуществляют дополнительный крен самолета, повторно измеряют угол крена и угол с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну, рассчитывают дальность до источника излучения по формуле  где Н - высота полета самолета; γ1,2, θ1,2 - измеренные углы крена самолета и углы с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при первоначальном и повторном после дополнительного крена положении самолета, соответственно, а угол на источник излучения относительно самолета - по формуле
где Н - высота полета самолета; γ1,2, θ1,2 - измеренные углы крена самолета и углы с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при первоначальном и повторном после дополнительного крена положении самолета, соответственно, а угол на источник излучения относительно самолета - по формуле  где θ - угол с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при горизонтальном полете самолета.
где θ - угол с вершиной в середине антенной базы между направлениями на источник излучения и на правую антенну фазового пеленгатора при горизонтальном полете самолета.
| Способ определения координат источника радиоизлучений с борта летательного аппарата по двум азимутальным пеленгам | 2016 |
|
RU2638177C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2619915C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2003 |
|
RU2258242C2 |
| Система пассивной локации для определения координат летательного аппарата в ближней зоне аэродрома и на этапе захода на посадку с резервным каналом определения дальности | 2016 |
|
RU2633380C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2012 |
|
RU2519593C2 |
| Стенд для испытания трубчатых фильтрующих элементов | 1982 |
|
SU1040362A1 |

