Изобретение относится к области строительства и может быть использовано для сборки в заводском цехе готовых крупногабаритных объемных модулей различного назначения, образующих квартиры, приквартирные холлы, офисные помещения и т.п.
Из уровня техники известна установка для формирования объемных блоков, которая включает пост формирования, наружные щиты опалубки, тележку с сердечником, рельсовые пути, гидросистему наружных щитов опалубки (см. Шляхтина Т.Ф. Технологические особенности изготовления железобетонных конструкций для жилищного и гражданского строительства. Братск, Изд. Братского гос. университета, 2010, стр. 65-67).
Недостатком такой установки является отсутствие возможности сборки объемных модулей больших размеров и планировок без дефектов и без изгибов плоских поверхностей стен, необходимость использования сердечника.
Также из уровня техники известен стапель для изготовления лестничного объемного модуля, принятый в качестве наиболее близкого решения. Такой стапель включает автоматизированную платформу, подвижные в горизонтальном направлении внешние и внутренние борта, расположенные вертикально и параллельно друг относительно друга, между соседними элементами внутренних бортов, лежащих в одной плоскости имеется зазор. На внешних бортах закреплены вкладыши для образования дверных и оконных проемов (см. патент RU 2747028, опубликован 23.04.2021).
Недостатком такого стапеля является то, что он предназначен для изготовления только такого объемного модуля, который образует лестничный узел. При этом, несмотря на то, что такой объемный модуль изготавливается с высокоточными размерами, возможно возникновение в продольных стенах при застывании бетона деформаций и изгибов в плоскости продольных стен.
Технической проблемой, решаемой изобретением, является повышение качества и точности изготовления крупногабаритных объемных модулей.
Техническим результатом изобретения является исключение деформации (изгибов) стен крупногабаритных объемных модулей, обеспечение возможности сохранения требуемых геометрических размеров и форм крупногабаритных объемных модулей, повышение производительности за счет увеличения скорости сборки крупногабаритных объемных модулей.
Технический результат изобретения достигается благодаря тому, что стапель для сборки крупногабаритных объемных модулей содержит подвижную в горизонтальной плоскости платформу, по меньшей мере две стойки, на которых закреплена балка с возможностью движения в вертикальной и горизонтальной плоскостях, направляющую, расположенную на уровне подвижной платформы вдоль балки и параллельно балке, на балке установлены с возможностью перемещения вдоль нее по меньшей мере два первых захвата и по меньшей мере один второй захват, а на направляющей установлены с возможностью перемещения вдоль нее два третьих захвата и по меньше мере два четвертых захвата.
Кроме того, каждый первый захват может иметь по меньшей мере два элемента, по меньшей мере один первый из которых соединен с балкой с возможностью перемещения вдоль нее, а по меньшей мере один другой соединен по меньшей мере с одним первым элементом с возможностью перемещения поперек балки в горизонтальной плоскости.
Кроме того, по меньшей мере один второй захват может иметь по меньшей мере три элемента, по меньшей мере один первый из которых соединен с балкой с возможностью перемещения вдоль нее, по меньшей мере один второй элемент выполнен в виде вилки и соединен по меньшей мере с одним первым элементом с возможностью поворота относительно по меньшей мере одного первого элемента в вертикальной плоскости, а по меньшей мере один другой элемент соединен с одним из элементов вилки с возможностью перемещения вдоль балки.
Кроме того, каждый третий захват может иметь по меньшей мере два элемента, по меньшей мере один первый из которых соединен с направляющей с возможностью перемещения вдоль нее, а по меньшей мере один другой соединен по меньшей мере с одним первым элементом с возможностью перемещения поперек направляющей в горизонтальной плоскости.
Кроме того, каждый четвертый захват может иметь по меньшей мере три элемента, по меньшей мере один первый из которых соединен с направляющей с возможностью перемещения вдоль нее, по меньшей мере один второй элемент соединен по меньшей мере с одним первым элементом с возможностью перемещения поперек направляющей в горизонтальной плоскости, а по меньшей мере один другой элемент соединен по меньшей мере с одним вторым элементом с возможностью перемещения в вертикальной плоскости.
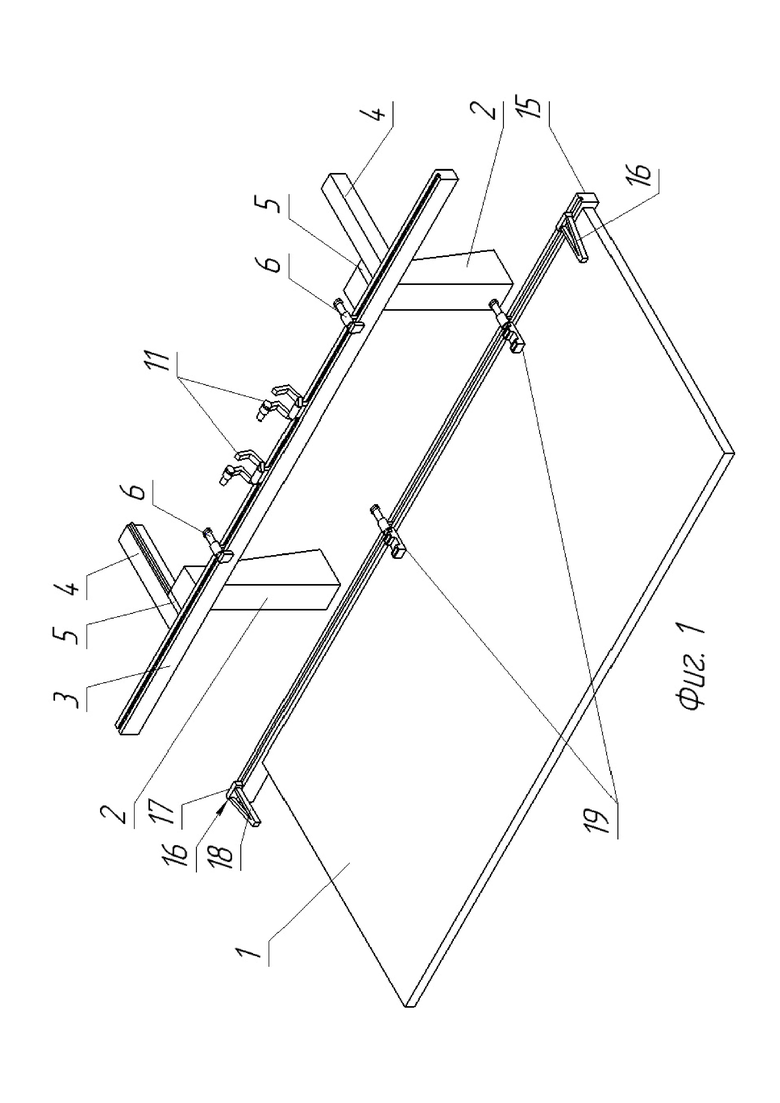
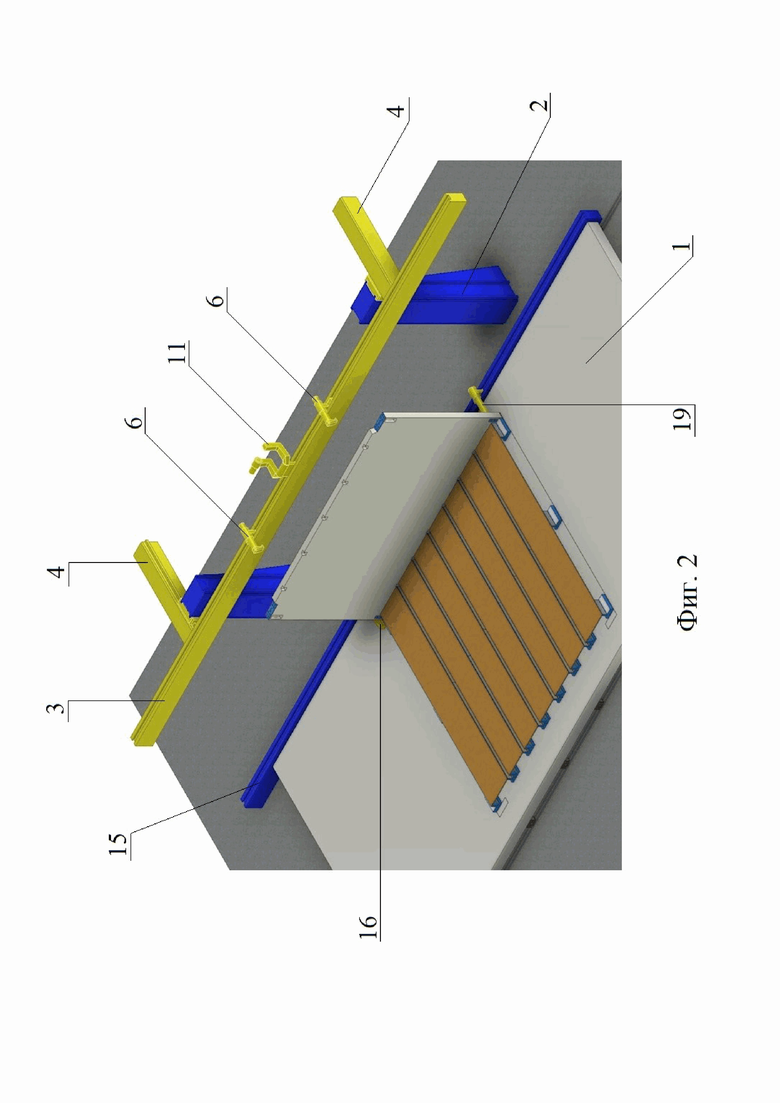
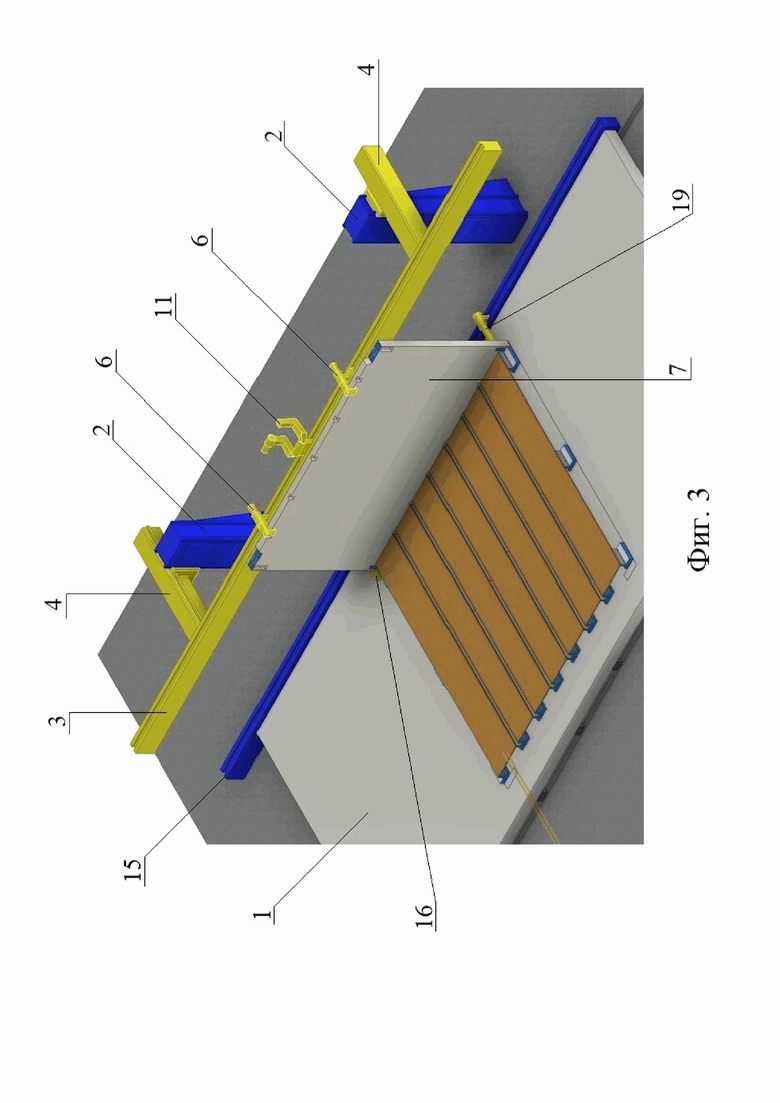
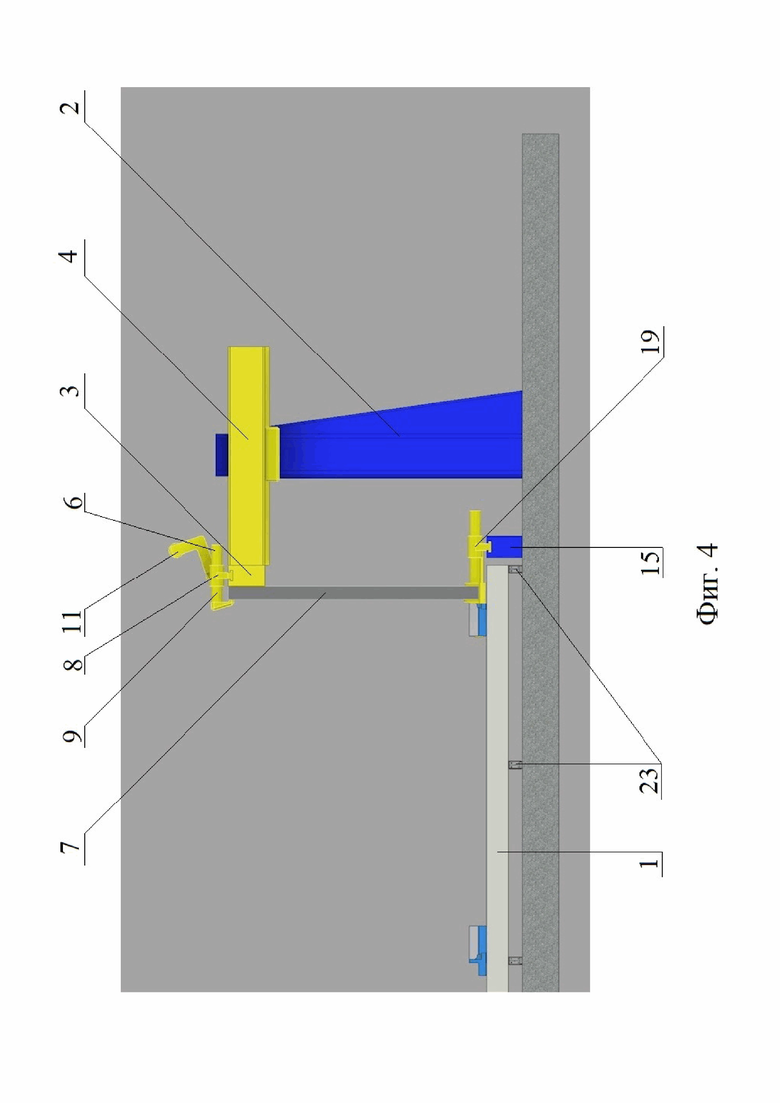
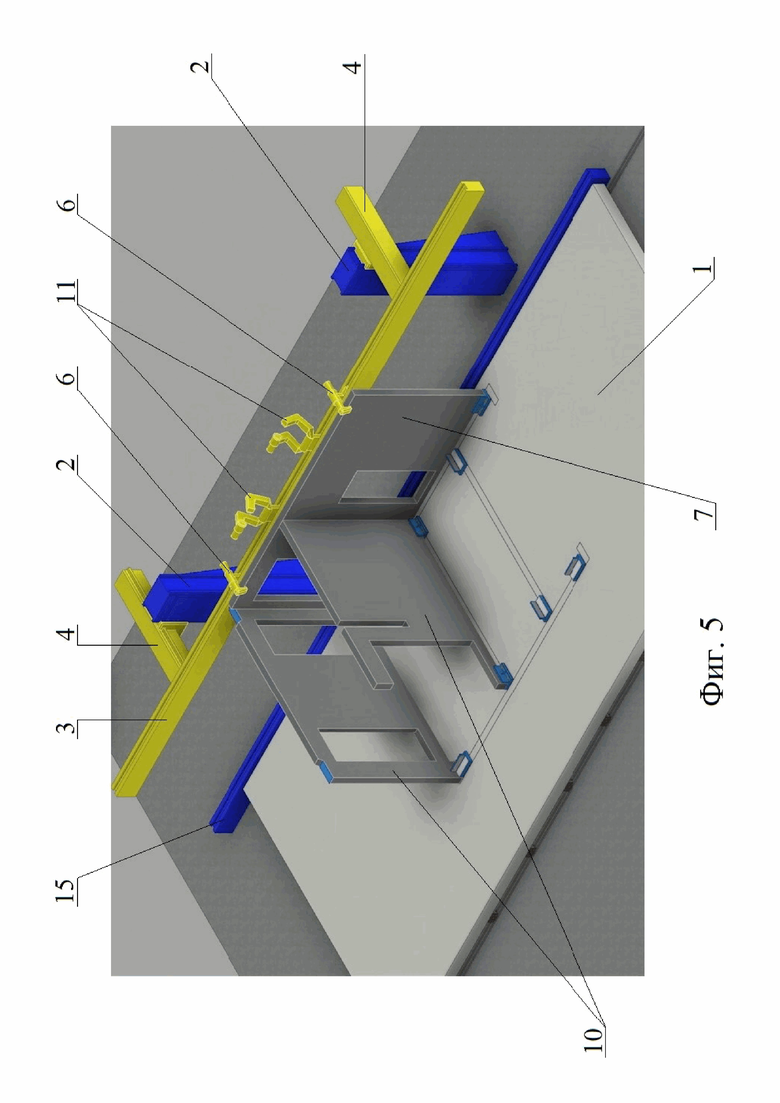
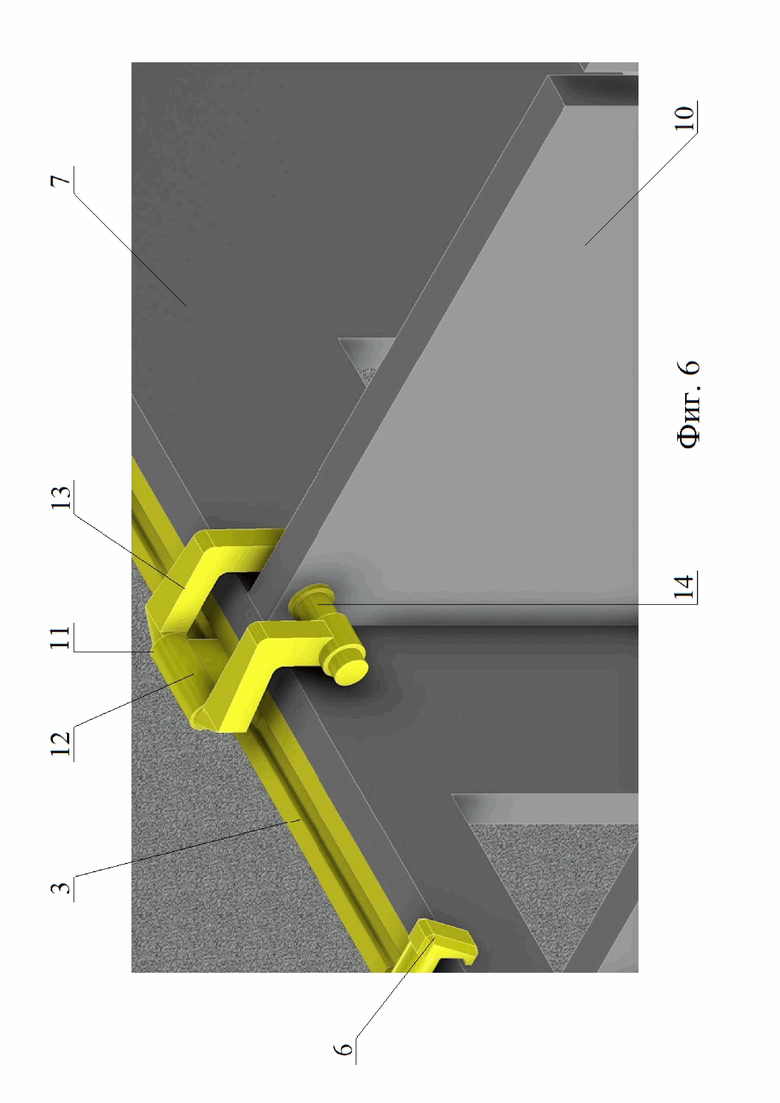
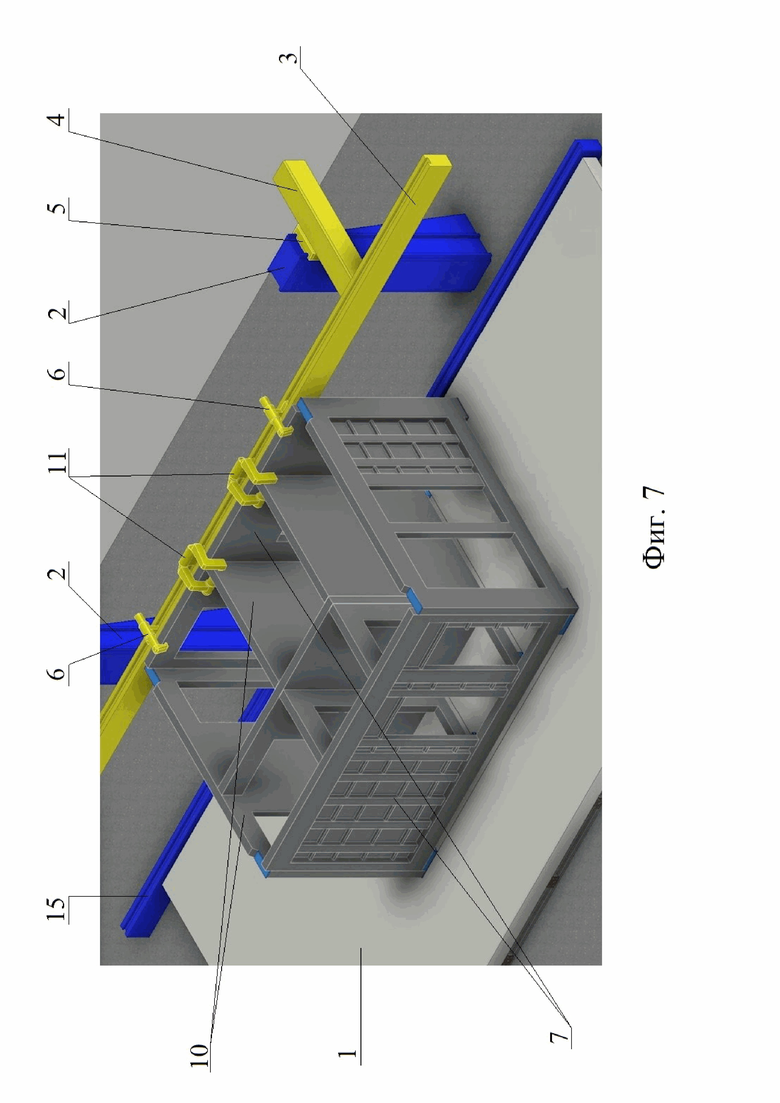
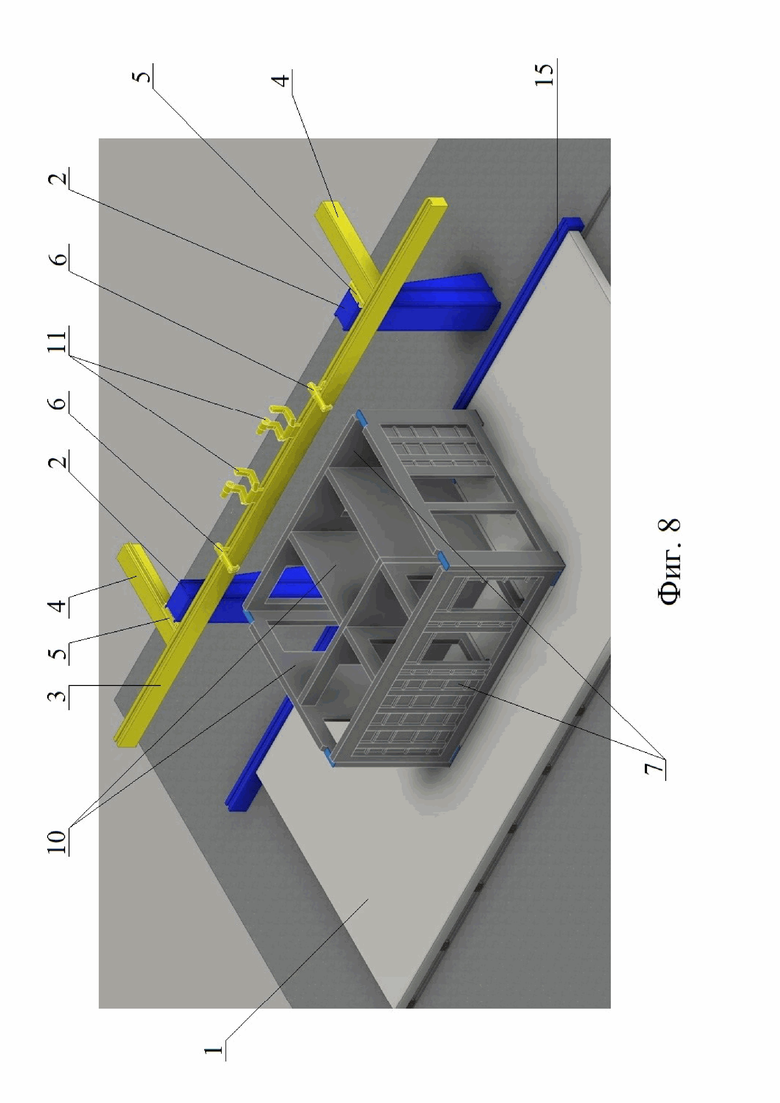
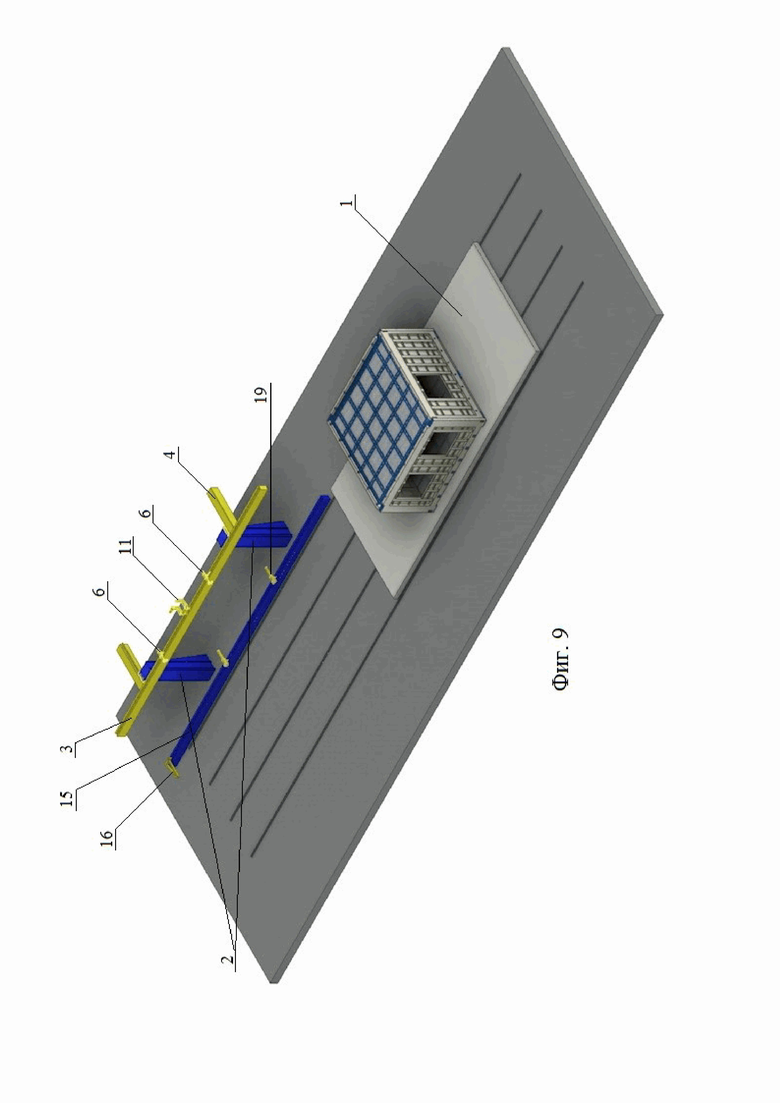
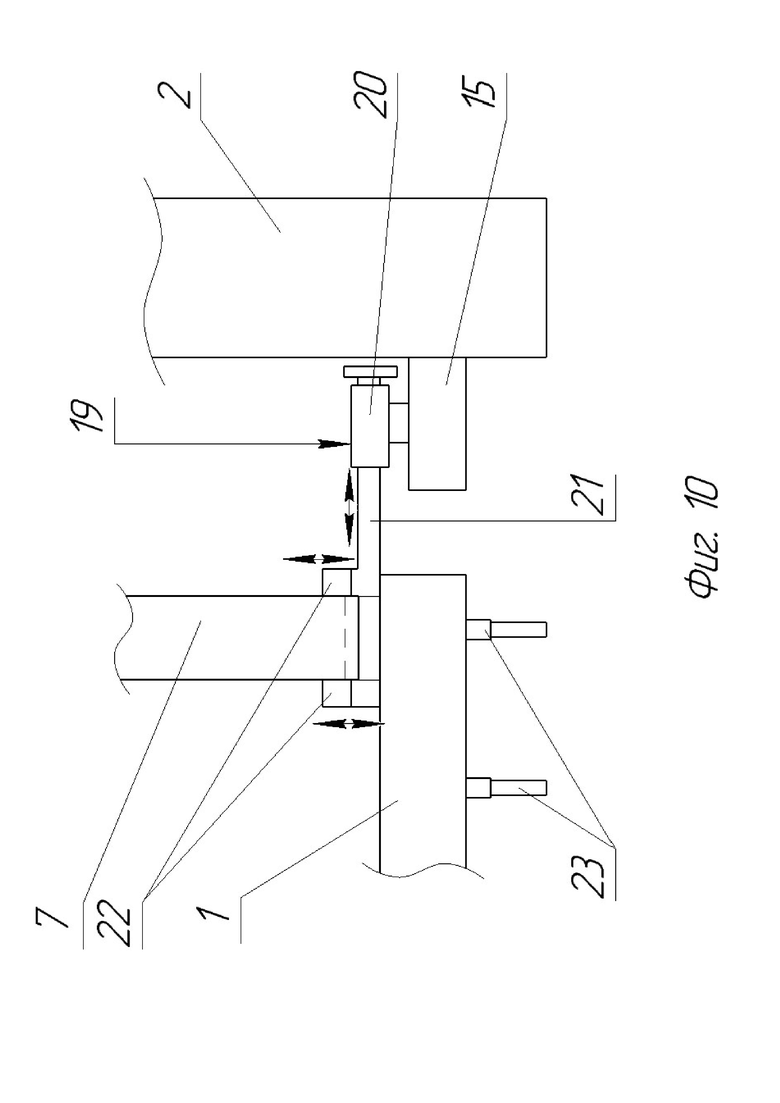
Изобретение поясняется чертежами, где на фиг. 1 показан общий вид в аксонометрии предложенного стапеля; на фиг. 2 показан предложенный стапель при установке продольной стены; на фиг. 3 показан предложенный стапель в момент захвата верхнего края продольной стены; на фиг. 4 показан вид сбоку предложенного стапеля в момент захвата верхнего и нижнего краев продольной стены; на фиг. 5 показан предложенный стапель при установке продольной и поперечных стен; на фиг. 6 показан узел места захвата поперечной стены; на фиг. 7 показан предложенный стапель с собранным объемным модулем (без плиты перекрытия) при захвате продольной и поперечных стен; на фиг. 8 показан предложенный стапель с собранным объемным модулем (без плиты перекрытия) при освобождении от захватов продольной и поперечных стен; на фиг. 9 показан предложенный стапель с собранным объемным модулей при перемещении собранного объемного модуля в цех отделки; на фиг. 10 показан узел места захвата нижнего края продольной стены.
Предложенный стапель предназначен для обеспечения высокоточной и технологичной сборки крупногабаритных модулей в объемную конструкцию (далее по тексту - объемные модули) в самые короткие сроки, исключая какие-либо возможные технологические дефекты собираемых объемных модулей.
Стапель содержит подвижную в горизонтальной плоскости платформу 1 (паллета), на которой осуществляется сборка модулей в крупногабаритную объемную конструкцию. Стапель также содержит вертикальные стойки 2, которые предназначены для жесткого крепления к полу. Крепление стоек 2 к полу может быть осуществлено любым известным способом, например, болтовым соединением, либо сваркой, либо бетонированием в пол, либо любым иным возможным способом, обеспечивающим жесткое и устойчивое положение вертикальных стоек 2 относительно пола. Стапель имеет, преимущественно, две стойки 2, однако их количество может быть и большим, в зависимости от габаритов собираемых объемных модулей и требований к жесткому и устойчивому положению при сборке объемных модулей.
На стойках 2 установлена (навешена) и закреплена подвижная балка 3. Балка 3 закреплена на стойках 2 с возможностью перемещения в вертикальной и горизонтальной плоскостях. Такое перемещение обеспечивается благодаря тому, что балка 3 соединена со стойками 2 посредством, например, промежуточных элементов 4 (кронштейнов), которые, в свою очередь, подвижно соединены со стоками 2 с помощью механизмов 5 перемещения. Механизмы 5 перемещения могут быть выполнены, например, в виде подвижных кареток, которые могут иметь привод (двигатель), а также могут иметь редуктор. Каждый механизм 5 перемещения соединен со своей стойкой 5 с возможностью перемещения вдоль нее (в вертикальной плоскости), при этом каждый промежуточный элемент 4 соединен со своим механизмом 5 перемещения с возможностью перемещения в горизонтальной плоскости. Перемещение каждого механизма 5 вдоль своей стойки 2, а также перемещение промежуточного элемента 4 относительно своего механизма 5 может быть обеспечено, например, благодаря тому, что каждая стойка 5 может иметь вертикальную зубчатую рейку (не показана), с которой соединена шестерня привода соответствующего механизма 5 перемещения, а каждый промежуточный элемент 4 может иметь горизонтальную зубчатую рейку (не показана), с которой соединена шестерня привода соответствующего механизма 5 перемещения. Причем каждый механизм 5 перемещения может иметь отдельно привод для перемещения по стойке 5 и отдельно привод для перемещения промежуточного элемента 4. Кроме того, возможно выполнение механизма 5 перемещения с гидравлическим или пневматическим приводом.
На балке 2 установлены первые захваты 6. Захваты 6 установлены и соединены с балкой 2 с возможностью перемещения вдоль балки 2. Захваты 6 предназначены для захвата верхнего края продольной стены 7 собираемого объемного модуля и удержания верхнего края в определенном фиксированном положении с целью исключения изгибов и деформаций стены 7 в ее плоскости. Число захватов 6 может быть любым от двух и более (три, четыре, пять и т.д.) в зависимости от габаритов стены 7, в зависимости от выполнения стены 7 (сплошной или с оконными и/или с дверными проемами), а также в зависимости от конструктивных особенностей собираемого объемного модуля.
Каждый первый захват 6 имеет, преимущественно, два подвижных элемента 8 и 9. Однако в вариантном исполнении в зависимости от конструктивных особенностей каждый захват 6 или один из захватов 6 (или несколько захватов 6) может иметь и большее число элементов, например, три или четыре элемента (не показаны), которые обеспечивают соответствующее перемещение вдоль и/или поперек балки 2, а также захват и удержание стены 7 в фиксированном положении.
В случае выполнения захватов 6 из двух элементов 8 и 9, то первый элемент 8 захвата 6 соединен с балкой 2 с возможностью перемещения вдоль нее. В данном случае с элементом 8 может быть соединен механизм перемещения захвата 6 с приводом (не показаны), который соединен непосредственно с балкой 2 (или с каким-либо элементом балки 2, по которому осуществляется перемещение захвата 6). В вариантном исполнении балка 2 может иметь продольную зубчатую рейку (не показана), с которой соединена шестерня привода механизма перемещения элемента 8 соответствующего захвата 6. Однако возможно и иное выполнение механизма перемещения элемента 8 захвата 6, например, имеющего гидравлический, пневматический, электрический или иной возможный привод перемещения. Второй элемент 9 захвата 6 соединен с первым элементов 8 с возможностью перемещения поперек балки 2 в горизонтальной плоскости. Элемент 9 может иметь Г-образную форму и служит непосредственно для захвата верхнего края стены 7 и удержания ее в фиксированном положении. Элемент 9 также имеет привод перемещения относительно элемента 8 и может быть выполнен любым возможным известным образом, например, может быть выполнен телескопическим с гидравлическим или пневматическим приводом, либо также может быть выполнен в виде зубчатой рейки, соединенной с шестерней привода, соединенного с элементом 8 (не показано). Также возможно любое иное выполнение механизма перемещения элемента 9 относительно элемента 8, в том числе элементы 8 и 9 могут быть выполнены конструктивно целостно, например, как цилиндр и шток, установленный в цилиндре, и т.п. В случае наличия у захвата 6 большего числа элементов, они также могут быть выполнены любым возможным образом, в том числе имеющим конструктивную целостность, при этом каждый из элементов будет отвечать за ту или иную функцию, например, один элемент перемещается вдоль балки 2, второй элемент удерживает механизмы перемещения, третий элемент перемещается поперек балки 2, четвертый элемент предназначен для захвата и фиксации верхнего края стены 7 и так далее (возможно любое выполнение, обеспечивающее перемещение захвата 6 и удержание им стены 7 в фиксированном положении).
На балке 2 установлен и соединен с балкой 2 второй захват 11. Второй захват 11 установлен и соединен с балкой 2 с возможностью перемещения вдоль балки 2. Захват 11 предназначен для захвата верхнего края поперечной стены 10 (торцевых и внутренних поперечных стен, в верхнем углу со стороны стены 7, удерживаемой захватами 6) собираемого объемного модуля и удержания верхнего края в определенном фиксированном положении с целью исключения перемещения стены 10 вдоль платформы 1. Число захватов 11 может быть любым от одного и более (два, три, четыре, пять и т.д.) в зависимости от числа стен 10, выполняемых в собираемом объемном модуле.
Второй захват 11 (или каждый второй захват 11 при их числе более одного) имеет, преимущественно, три подвижных элемента 12, 13 и 14. Однако в вариантном исполнении в зависимости от конструктивных особенностей, захват 11 или один из захватов 11 (или несколько захватов 11) может иметь и большее число элементов, например, четыре или пять элементов (не показаны), которые обеспечивают соответствующее перемещение вдоль балки 2, а также удержание стены 10 в фиксированном положении.
В случае выполнения захвата 11 из трех элементов 12, 13, 14, то первый элемент 12 захвата 11 соединен с балкой 2 с возможностью перемещения вдоль нее. В данном случае с элементом 12 может быть соединен механизм перемещения захвата 11 с приводом (не показаны), который соединен непосредственно с балкой 2 (или с каким-либо элементом балки 2, по которому осуществляется перемещение захвата 11). По аналогии с захватами 6, в вариантном исполнении балка 2 может иметь общую продольную зубчатую рейку (не показана), с которой также соединена шестерня привода механизма перемещения элемента 12 захвата 11. Однако возможно и иное выполнение механизма перемещения элемента 12 захвата 11, например, имеющего гидравлический, пневматический, электрический или иной привод. Второй элемент 13 захвата 11 может быть выполнен в виде U-образной вилки, который соединен с первым элементом 12 захвата 11 с возможностью поворота относительно элемента 12 в вертикальной плоскости. U-образная вилка предназначена для захвата стены 10 с обеих ее плоских сторон в верхней части (в верхнем углу, обращенном к стене 7). Элемент 13 также имеет привод перемещения (вращения, поворота) относительно элемента 12 и может быть выполнен любым возможным известным образом. В том числе, например, элемент 13 может быть жестко посажен на приводной вал, соединенный с элементом 12 (не показано), либо элемент 13 (между элементами вилки) может иметь шестерню, приводимую во вращение приводом, соединенным с элементом 12, либо возможно любое иное известное выполнение, обеспечивающее поворот элемента 13 относительно элемента 12. Третий элемент 14 захвата 11 соединен с одним из элементов U-образной вилки 13 (с одним из концов) с возможностью перемещения вдоль балки 2 (в горизонтальной плоскости). Элемент 14 выполнен в виде упора и предназначен для удержания (совместно с вилкой 13) и фиксации положения стены 10.
Элемент 14 также имеет привод перемещения относительно элемента 13 и может быть выполнен любым возможным известным образом, например, может быть выполнен телескопическим с гидравлическим или пневматическим приводом, либо также может быть выполнен в виде зубчатой рейки, соединенной с шестерней привода, соединенного с элементом 13. Также возможно любое иное выполнение механизма перемещения элемента 14 относительно элемента 13, в том числе элементы 13 и 14 могут быть выполнены конструктивно целостно, например, как цилиндр, расположенный на конце одного из элементов вилки, и шток, установленный в цилиндре, и т.п. В случае наличия у захвата 11 большего числа элементов, они также могут быть выполнены любым возможным образом, в том числе имеющим конструктивную целостность, при этом каждый из элементов будет отвечать за ту или иную функцию, например, один элемент перемещается вдоль балки 2, второй элемент удерживает механизмы перемещения, третий элемент поворачивается в вертикальной плоскости, четвертый элемент предназначен для фиксации верхнего края стены 10 и так далее (возможно любое выполнение, обеспечивающее перемещение захвата 11, захват и удержание им стены 10 в фиксированном положении).
В нижней части стапеля установлена и жестко закреплена продольная направляющая 15 (вторая балка). Направляющая 15 расположена, преимущественно, на уровне платформы 1 (однако она может быть расположена немного выше или немного ниже платформы 1) вдоль балки 3 и параллельно балке 3. Направляющая 15 может быть жестко закреплена либо на полу (с использованием промежуточных элементов крепления, не показаны), либо на стойках 2. При этом жесткое крепление может быть обеспечено любым возможным известным способом (например, сваркой или болтовым соединением и т.п.).
На направляющей 15 установлены третьи захваты 16. Третьи захваты 16 установлены и соединены с направляющей 15 с возможностью перемещения вдоль нее. Захваты 16 предназначены для захвата и удержания в фиксированном положении продольной стены 7. Захваты 16 удерживают противоположные вертикальные края стены 7 в нижней части и предотвращают перемещение стены 7 вдоль платформы 1. Число захватов 16 может быть один или два, в зависимости от необходимости удержания стены 7 с одной стороны или с обеих торцевых сторон.
Каждый третий захват имеет, преимущественно, два элемента 17 и 18. Однако в вариантном исполнении, в зависимости от конструктивных особенностей, каждый захват 16 или один из захватов 16 может иметь либо один цельный элемент (в данном случае без необходимости перемещения в поперечном направлении относительно направляющей 15 в горизонтальной плоскости), либо более двух элементов, например, три или четыре элемента (не показаны), которые обеспечивают соответствующее перемещение вдоль и/или поперек направляющей 15, а также захват и удержание стены 7 в фиксированном положении.
В случае выполнения захватов 16 из двух элементов 17 и 18, то первый элемент 17 захвата 16 соединен с направляющей 15 с возможностью перемещения вдоль нее. В данном случае с элементом 17 может быть соединен механизм перемещения захвата 16 с приводом (не показаны), который соединен непосредственно с направляющей 15 (или с каким-либо элементом направляющей 15, по которому осуществляется перемещение захвата 16). В вариантном исполнении направляющая 15 может иметь продольную зубчатую рейку (не показана), с которой соединена шестерня привода механизма перемещения элемента 17 захвата 16. Однако возможно и иное выполнение механизма перемещения элемента 17 захвата 16, например, имеющего гидравлический, пневматический, электрический или иной привод. Второй элемент 18 захвата 16 соединен с первым элементом 17. При этом элемент 18 может быть либо жестко соединен с элементом 17 (в случае необходимости обеспечения только упора элемента 18 в вертикальный край стены 7 или в торцевую стену 10), либо с возможностью перемещения поперек направляющей 15 в горизонтальной плоскости (в случае необходимости захвата вертикального края стены 7). В случае выполнении элемента 18 подвижным, он также имеет привод перемещения относительно элемента 17 и может быть выполнен любым возможным известным образом, например, может быть выполнен телескопическим с гидравлическим или пневматическим приводом, либо также может быть выполнен в виде зубчатой рейки, соединенной с шестерней привода, соединенного с элементом 17. Также возможно любое иное выполнение механизма перемещения элемента 18 относительно элемента 17, в том числе элементы 17 и 18 могут быть выполнены конструктивно целостно, например, как цилиндр и шток, установленный в цилиндре, и т.п. В случае наличия у захвата 16 большего числа элементов, они также могут быть выполнены любым возможным образом, в том числе имеющим конструктивную целостность, при этом каждый из элементов будет отвечать за ту или иную функцию, например, один элемент перемещается вдоль направляющей 15, второй элемент удерживает механизмы перемещения, третий элемент перемещается поперек направляющей 15, четвертый элемент предназначен для упора в вертикальный край стены 7 (или в торцевую стену 10) и так далее (возможно любое выполнение, обеспечивающее перемещение захвата 16 и удержание им стены 7 в фиксированном положении).
На направляющей 15 установлены четвертые захваты 19. Четвертые захваты 19 установлены и соединены с направляющей 15 с возможностью перемещения вдоль нее. Захваты 19 предназначены для захвата и удержания в фиксированном положении нижнего горизонтального края стены 7 с целью исключения прогибов и деформаций стены 7 в ее плоскости. Число захватов 19 может быть любым от двух и более (три, четыре, пять и т.д.) в зависимости от габаритов стены 7, в зависимости от выполнения стены 7 (сплошной или с оконными и/или с дверными проемами), а также в зависимости от конструктивных особенностей собираемого объемного модуля.
Каждый четвертый захват 19 имеет, преимущественно, три подвижных элемента 20, 21, 22. Однако в вариантном исполнении в зависимости от конструктивных особенностей каждый захват 19 или один из захватов 19 (или несколько захватов 19) может иметь и большее число элементов, например, четыре или пять элементов (не показаны), которые обеспечивают соответствующее перемещение вдоль и/или поперек направляющей 15, а также удержание стены 7 в фиксированном положении.
В случае выполнения захватов 19 из трех элементов 20, 21 и 22, то первый элемент 20 захвата 19 соединен с направляющей 15 с возможностью перемещения вдоль нее. В данном случае с элементом 20 может быть соединен механизм перемещения захвата 19 с приводом (не показаны), который соединен непосредственно с направляющей 15 (или с каким-либо элементом направляющей 15, по которому осуществляется перемещение захвата 19). В вариантном исполнении направляющая 15 может иметь продольную зубчатую рейку (не показана), с которой соединена шестерня привода механизма перемещения элемента 20 соответствующего захвата 19. Однако возможно и иное выполнение механизма перемещения элемента 20 захвата 19, например, имеющего гидравлический, пневматический, электрический или иной привод. Второй элемент 21 захвата 19 соединен с первым элементом 20 с возможностью перемещения поперек направляющей 15 в горизонтальной плоскости. Элемент 21 также имеет привод перемещения относительно элемента 20 и может быть выполнен любым возможным известным образом, например, может быть выполнен телескопическим с гидравлическим или пневматическим приводом, либо также может быть выполнен в виде зубчатой рейки, соединенной с шестерней привода, соединенного с элементом 20. Также возможно любое иное выполнение механизма перемещения элемента 21 относительно элемента 20, в том числе элементы 20 и 21 могут быть выполнены конструктивно целостно, например, как цилиндр и шток, установленный в цилиндре, и т.п. Третий элемент 22 захвата 19 соединен со вторым элементом 21 с возможностью перемещения поперек направляющей 15 в вертикальной плоскости. Элемент 22 также имеет привод перемещения относительно элемента 21 и может быть выполнен любым возможным известным образом, например, может быть выполнен телескопическим с гидравлическим или пневматическим приводом, либо также может быть выполнен в виде зубчатой рейки, соединенной с шестерней привода, соединенного с элементом 21. Также возможно любое иное выполнение механизма перемещения элемента 22 относительно элемента 21, в том числе элементы 21 и 22 могут быть выполнены конструктивно целостно, например, как цилиндр и шток, установленный в цилиндре, и т.п. Элемент 22 предназначен непосредственно для захвата нижнего края стены 7 и удержания стены 7 в фиксированном положении.
В случае наличия у захвата 19 большего числа элементов, они также могут быть выполнены любым возможным образом, в том числе имеющим конструктивную целостность, при этом каждый из элементов будет отвечать за ту или иную функцию, например, один элемент перемещается вдоль направляющей 15, второй элемент удерживает механизмы перемещения, третий элемент перемещается поперек направляющей 15 в горизонтальной плоскости, четвертый и пятый элементы предназначены для фиксации нижнего края стены 7 и так далее (возможно любое выполнение, обеспечивающее перемещение захвата 19 и удержание им стены 7 в фиксированном положении).
Предложенный стапель может иметь систему управления со специальным программным обеспечением, с помощью которой осуществляется автоматическая сборка объемных модулей. Также стапель имеет различные датчики, в числе которых датчики расстояния, давления, температуры, которые могут быть выполнены любого известного типа. Соответствующие датчики могут быть расположены, в том числе и на захватах 6, 11, 16, 19.
Работает предложенный стапель следующим образом.
На подвижной платформе 1, которая перемещается по опорным роликам 23, вначале формируют нижнюю грань (основание) объемного модуля. Нижнюю грань формируют известным способом, в том числе с применением арматуры, утеплителей, звукоизоляции и т.п. Далее платформа 1 перемещается в зону расположения стоек 2 с балкой 3 и направляющей 15, где на платформу 1 устанавливают продольную стену 7. После установки стены 7 на платформу 1, на направляющей 15 (вдоль нее) приводятся в движение (соответствующим приводом) захваты 16, которые захватывают в нижней части вертикальные края стены 7, фиксируя стену 7 с торцевых сторон. Также вдоль направляющей 15 приводятся в движение (соответствующим приводом) захваты 19. Захваты 19 перемещаются до необходимого заданного положения относительно стены 7. Далее элемент 21 каждого захвата 19 перемещается поперек направляющей 15 в горизонтальной плоскости, заезжает под нижний край стены 7 (благодаря наличию у стены 7 в нижней части шпоночных выступов - «ножек») и фиксируется в требуемом положении. После этого элементы 22 каждого захвата 19 перемещаются поперек направляющей 15 в вертикальной плоскости (выдвигаются, например, из элемента 21), в результате чего обеспечивается захват нижнего края стены 7, его фиксация и вертикальная продольная стена 7 выравнивается по длине с погрешностью установки от 1 до 2 мм.
Далее на верхней балке 3 вдоль нее перемещаются до необходимого положения (строго по заданным отметкам) захваты 6, а также захваты 11 для удержания поперечных стен 10 (в том числе торцевых). Балка 3 перемещается в вертикальной плоскости до необходимого положения, соответствующего высоте стены 7. Также балка 3 перемещается в горизонтальной плоскости до стены 7. Балка 3 является своего рода упором для стены 7 вдоль всего его верхнего края. После того, как балка 3 упирается в стену 7, балка 3 перемещается вниз до такого положения, когда Г-образные элементы 9 захватов 6 способны захватить верхний край стены 7. Далее элементы 9 перемещаются поперек балки 3 в горизонтальной плоскости (в сторону балки 3), в результате чего обеспечивается захват верхнего края стены 7, его фиксация и также происходит выравнивание стены 7 по ее длине с погрешностью установки от 1 до 2 мм.
Таким образом, первое продольное изделие объемного модуля (вертикальная стена 7) с помощью захватов 6, 16 и 19 выставляется в высокоточных отметках, исключаются перекосы и какие-либо деформации стены 7.
Далее на платформе 1 устанавливают поперечные стены 10 (торцевые изделия). Торцевые стены 10 устанавливают с помощью лазерных установок (не показаны), обеспечивающих высокоточное положение стен 10. Торцевые стены 10 крепятся к продольным стенам с помощью известных болтовых узлов (болтовых соединений), которые позволяют выровнять установку стен 10 в проектном положении. Также могут использоваться дополнительно и сварные соединения.
На балке 3 (вдоль нее) перемещаются захваты 11 до места расположения поперечных стен 10. После этого элементы 13 (U-образные вилки) поворачиваются в вертикальной плоскости вниз и приводятся в движение (перемещаются) элементы 14 захватов 11, обеспечивая захват стен 10 в верхней части и их фиксацию.
Далее устанавливают второе продольное изделие (вторую стену 7), для которого не требуются захваты. Торцевые стены 10 с помощью болтовых соединений соединяются со второй продольной стеной 7 аналогично соединению с первой продольной стеной 7. Со стороны нижнего края второй стены 7 с помощью болтовых соединений соединяются концы скрытых поперечных каркасов нижней плиты (основания) объемного модуля. Таким образом, нижняя часть объемного модуля со стороны второй продольной стены 7 выравнивается в допустимый размер.
Далее осуществляют проверку всех необходимых размеров, освобождают все захваты 6, 11, 16, 19 и устанавливают верхнюю плиту перекрытия объемного модуля, которую с помощью болтовых соединений крепят к вертикальным стенам. Далее все болтовые соединения затягиваются, производится сварка узлов соединения всех внутренних стен, а также верхних балок и нижних каркасов. Платформа 1 с собранным объемным модулем перемещается из зоны расположения стоек 2, где с помощью подъемного механизма объемный модуль снимается с платформы 1 и далее перемещается в цех отделки.
Благодаря использованию предложенного стапеля с вышеописанными захватами 6, 11, 16, 19 для сборки модулей в объемную конструкцию, обеспечивается жесткая фиксация стен объемных модулей при их сборке, исключаются какие-либо деформации, изгибы, искривления стен крупногабаритных объемных модулей в процессе застывания бетона. В результате сохраняются требуемые геометрические размеры и формы объемных модулей. При использовании предложенного стапеля существенно повышается производительность и скорость сборки модулей в объемную конструкцию при одновременном повышении качества сборки объемных модулей, а также точности изготовления крупногабаритных объемных модулей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ изготовления лестничного объемного модуля | 2020 |
|
RU2747028C1 |
| СПОСОБ ВОЗВЕДЕНИЯ СТЕН, УСТАНОВКА ДЛЯ АВТОМАТИЗИРОВАННОГО ВОЗВЕДЕНИЯ СТЕН ИЗ СТРОИТЕЛЬНЫХ МОДУЛЕЙ И КОМПЛЕКТ ОБОРУДОВАНИЯ ДЛЯ МЕХАНИЗИРОВАННОГО ВОЗВЕДЕНИЯ СТЕН ИЗ СТРОИТЕЛЬНЫХ МОДУЛЕЙ | 2011 |
|
RU2464392C1 |
| Мобильный портальный транспортер | 2023 |
|
RU2796172C1 |
| Автоматическая траверса | 2020 |
|
RU2749677C1 |
| СРЕДСТВО И СПОСОБ ПРОИЗВОДСТВА СТРОИТЕЛЬНОЙ ПАНЕЛИ | 1995 |
|
RU2140851C1 |
| СПОСОБ СБОРКИ ДИРИЖАБЛЕЙ ЖЕСТКОГО ТИПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2726579C2 |
| СКЛАДНОЙ БАШЕННЫЙ КРАН | 2023 |
|
RU2817662C1 |
| ВЕРТИКАЛЬНЫЙ КАНАТНЫЙ СУДОПОДЪЁМНИК | 2021 |
|
RU2778183C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
Изобретение относится к области строительства и может быть использовано для сборки в заводском цехе готовых крупногабаритных объемных модулей различного назначения, образующих квартиры, приквартирные холлы, офисные помещения и т.п. Техническим результатом изобретения является исключение деформации (изгибов) стен крупногабаритных объемных модулей, обеспечение возможности сохранения требуемых геометрических размеров и форм крупногабаритных объемных модулей, повышение производительности за счет увеличения скорости сборки крупногабаритных объемных модулей. Стапель для сборки крупногабаритных объемных модулей содержит подвижную в горизонтальной плоскости платформу 1, по меньшей мере две стойки 2, на которых закреплена балка 3 с возможностью движения в вертикальной и горизонтальной плоскостях. Стапель также содержит направляющую 15, расположенную на уровне подвижной платформы 1 вдоль балки 2 и параллельно балке 2. На балке 3 установлены с возможностью перемещения вдоль нее по меньшей мере два первых захвата 6 и по меньшей мере один второй захват 11. На направляющей 15 установлены с возможностью перемещения вдоль нее два третьих захвата 16 и по меньше мере два четвертых захвата 19. 4 з.п. ф-лы, 10 ил.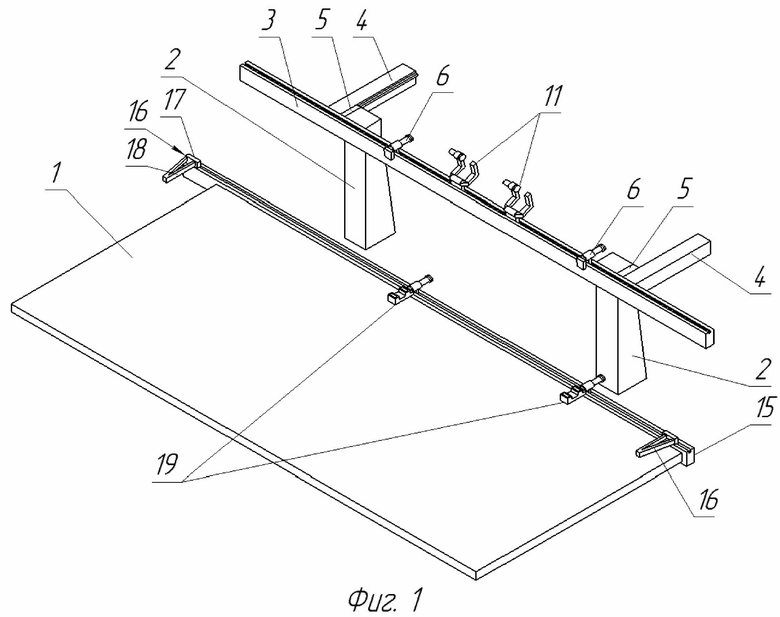
1. Стапель для сборки крупногабаритных объемных модулей, содержащий подвижную в горизонтальной плоскости платформу, по меньшей мере две стойки, на которых закреплена балка с возможностью движения в вертикальной и горизонтальной плоскостях, направляющую, расположенную на уровне подвижной платформы вдоль балки и параллельно балке, на балке установлены с возможностью перемещения вдоль нее по меньшей мере два первых захвата и по меньшей мере один второй захват, а на направляющей установлены с возможностью перемещения вдоль нее два третьих захвата и по меньше мере два четвертых захвата.
2. Стапель по п.1, в котором каждый первый захват имеет по меньшей мере два элемента, по меньшей мере один первый из которых соединен с балкой с возможностью перемещения вдоль нее, а по меньшей мере один другой соединен по меньшей мере с одним первым элементом с возможностью перемещения поперек балки в горизонтальной плоскости.
3. Стапель по п.1, в котором по меньшей мере один второй захват имеет по меньшей мере три элемента, по меньшей мере один первый из которых соединен с балкой с возможностью перемещения вдоль нее, по меньшей мере один второй элемент выполнен в виде вилки и соединен по меньшей мере с одним первым элементом с возможностью поворота относительно по меньшей мере одного первого элемента в вертикальной плоскости, а по меньшей мере один другой элемент соединен с одним из элементов вилки с возможностью перемещения вдоль балки.
4. Стапель по п.1, в котором каждый третий захват имеет по меньшей мере два элемента, по меньшей мере один первый из которых соединен с направляющей с возможностью перемещения вдоль нее, а по меньшей мере один другой соединен по меньшей мере с одним первым элементом с возможностью перемещения поперек направляющей в горизонтальной плоскости.
5. Стапель по п.1, в котором каждый четвертый захват имеет по меньшей мере три элемента, по меньшей мере один первый из которых соединен с направляющей с возможностью перемещения вдоль нее, по меньшей мере один второй элемент соединен по меньшей мере с одним первым элементом с возможностью перемещения поперек направляющей в горизонтальной плоскости, а по меньшей мере один другой элемент соединен по меньшей мере с одним вторым элементом с возможностью перемещения в вертикальной плоскости.
| Кондуктор для сборки из плоских панелей пространственных блок-коробок | 1959 |
|
SU131068A1 |
| СБОРОЧНЫЙ СТАПЕЛЬ ДЛЯ СБОРКИ КРУПНОГАБАРИТНЫХ КОНСТРУКЦИЙ | 2012 |
|
RU2559662C2 |
| Центробежный карбюратор | 1924 |
|
SU1657A1 |
| Станок для разделки рыб | 1958 |
|
SU119667A1 |
| Способ производства объемного модуля | 2019 |
|
RU2715781C1 |
