Изобретение относится к сельскому хозяйству, в частности к устройствам для дифференцированного внесения расходных материалов в процессе выполнения полевых работ в технологии точного земледелия.
Известна «Автоматизированная сельскохозяйственная система» US 10185317 [1], содержащая: основное транспортное средство; две или более автономных сельскохозяйственных машин (ААМ), подсистему управления для планирования пути и управления движением каждого AAM относительно основного транспортного средства при выполнении сельскохозяйственной операции, данные планирования пути и управления передаются по беспроводной сети в виде одного или более пакетов данных из подсистемы управления в AAM.
Недостатком известного способа является невозможность выдерживания заданной точности управления автономными сельхозмашинами на большом расстоянии, обусловленное затуханием сигнала коррекционных поправок RTK в складках местности.
Наиболее близким к заявляемому техническому решению является «Способ координации наземных подвижных автоматизированных устройств с помощью единой централизованной управляющей системы» RU 2691788 [2], включающий привязанный к с/х агрегату БПЛА с системой управления роботами.
Известный способ позволяет управлять роботами - беспилотными летательными аппаратами - БПЛА даже в пересеченной местности.
К недостаткам способа относится низкая автономность каждого БПЛА. Также недостатком является узкая область применения, связанная с управлением ограниченным количеством роботов, подключенных к системе.
Технический результат - повышение надежности управления роботами, повышение вариабельности конфигурации системы обработки полей путем изменения количества и специализации роботов, в т.ч. автономных с/х агрегатов, расширение области применения.
Технический результат достигается тем, что: Автоматизированная система для внесения расходных материалов в процессе выполнения полевых сельскохозяйственных (с/х) работ, содержащая ведущий беспилотный летательный аппарат (БПЛА), ведущий с/х агрегат для управления группой наземных роботов, предназначенных для внесения расходных материалов, характеризуется тем, что БПЛА выполнен с возможностью соединения тросом с ведущим с/х агрегатом или может выполнять свободный полет без привязи, и содержит ретранслятор корректирующих координатных поправок для наземных роботов, приемную и передающую антенны, а наземные роботы снабжены приемниками сигналов спутниковых систем навигации и приемниками сигналов коррекционных поправок.
Осуществление
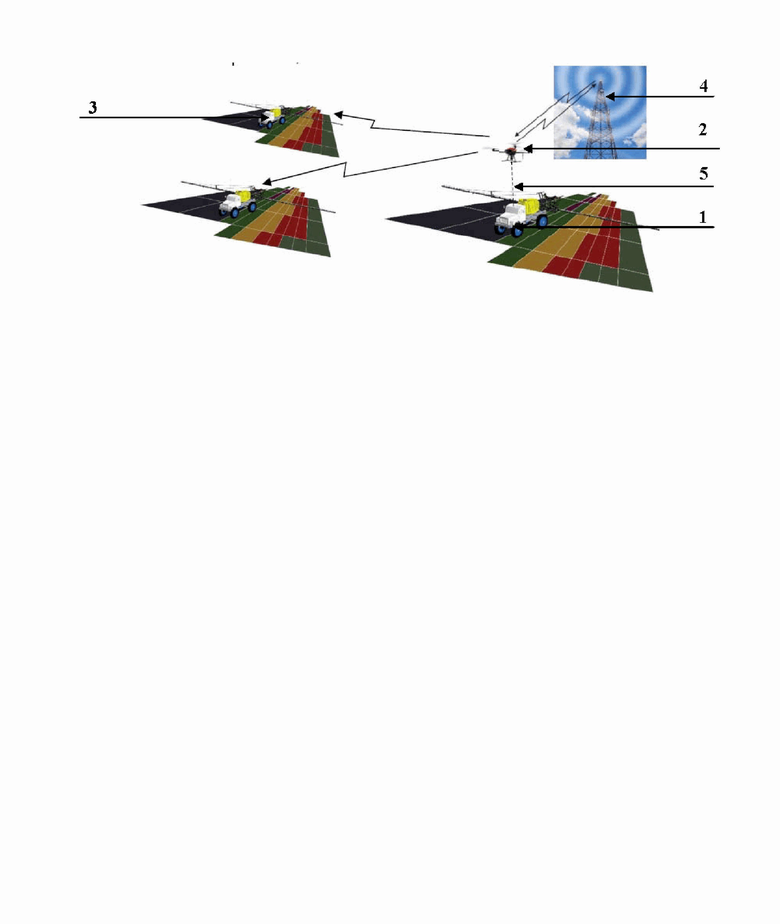
На фиг. показано взаимодействие основных элементов, где:
1 – ведущий с/х агрегат;
2 – ведущий БПЛА;
3 – роботы (в т.ч. автономные с/х агрегаты);
4 – базовая станция;
5 – трос.
Устройство действует следующим образом
К ведущему сельскохозяйственному агрегату 1 привязан ведущий БПЛА 2 посредством троса 5. Сигнал от базовой станции 4 через ретранслятор (не показан), установленный на ведущем БПЛА, поступает на приемники роботов 3, в том числе и на ведущий с/х агрегат. В качестве роботов могут использоваться как автоматические управляемые с/х агрегаты, например, опрыскиватели с системой управления форсунками, так и специализированные ведомые БПЛА. В каждом роботе имеется блок управления, в котором заложено координатное задание и который управляет исполнительными механизмами, например, форсунками для распыления жидкости, исходя из задания и текущих координат, выдаваемых приемниками сигналов спутниковых систем навигации и приемниками сигналов коррекционных поправок.
Для расширения методов дифференцированного внесения удобрений и пестицидов предлагается использовать программно-аппаратный комплекс на основе ведущего с/х агрегата, оборудованного соответствующей системой управления внесением расходных материалов, и привязного к ведущему с/х агрегату ведущего БПЛА, или выполняющего свободный полет ведущий БПЛА являющегося источником изображения объектов обработки на поле и, одновременно, приемником/ретранслятором корректирующих координатных поправок.
Предлагаемое решение имеет следующий функционал, обеспечивающий решение задач технологии дифференцированного внесения материалов:
- длина троса в 20-30 м обеспечивает гарантированное превышение ведущего БПЛА над лесными массивами и соответственно дальность связи с RTK базовой станцией по прямой видимости до 50 км;
- высота полета ведущего ДПЛА на привязи обеспечивает зону видеоизображения соразмерную с шириной захвата ведущего с/х агрегата, а наличие RTK поправок обеспечивает координатную привязку видеоизображения с необходимой точностью для выделения объектов обработки;
- электропитание радиосвязной аппаратуры и самого ведущего БПЛА обеспечивается через кабель, соединяющий ведущий БПЛА и ведущий с/х агрегат, чем обеспечивается неограниченное время пребывания ведущего БПЛА в воздухе;
- видеоизображение поступает в бортовую систему ведущего с/х агрегата от одной или нескольких RGB или мультиспектральных камер, установленных на ведущем БПЛА по Wi-Fi связи или по опто кабелю;
- наличие на ведущем БПЛА датчиков обнаружения препятствий обеспечивает (путем работы соответствующих средств – опто, видео и других датчиков) во время движения соответствующее уклонение от линий электропередач и веток деревьев в автоматическом режиме;
- ведущий БПЛА может содержать средства дополнительного автоматического подъема на высоту при ослаблении или пропадании сигнала коррекционных поправок и систему автоматической посадки и отключения ретранслятора при восстановлении приема сигнала коррекции на с/х агрегате напрямую от RTK базовой станции.
- ведущий БПЛА может выполнять свободный полет без привязи с выполнением функций ретранслятора поправок RTK и передачи видеоизображений в зоне движения ведущего с/х агрегата с временными ограничениями по емкости имеющейся на борту аккумуляторной батареи.
Технический результат - повышение надежности управления роботами достигается тем, что каждый робот, в том числе установленный на основном с/х аппарате, получает достаточно сильный сигнал координатных поправок от относительно близко расположенного ретранслятора с достаточно высоко расположенной антенной, сигнал от которой проникает в глубокие овраги и складки местности. Повышение вариабельности конфигурирования системы обработки полей достигается путем изменения количества и специализации роботов, например, ведомых БПЛА или с/х опрыскивателей, автоматических косилок и т.д. Повышение надежности достигается независимостью работы каждого робота, и при выходе из строя одного робота остальные роботы продолжают работу.
Промышленная применимость
Предлагаемый ретранслятор координатных поправок может использоваться с применением любых известных устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| СПОСОБ ПРЕДСТАРТОВОЙ ПОДГОТОВКИ ПУСКОВОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399860C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| Бортовая интеллектуальная система поиска и наведения беспилотного летательного аппарата | 2023 |
|
RU2819590C1 |
Автоматизированная система для внесения расходных материалов в процессе выполнения полевых сельскохозяйственных (с/х) работ содержит ведущий беспилотный летательный аппарат (БПЛА), ведущий с/х агрегат для управления группой наземных роботов, предназначенных для внесения расходных материалов, при этом БПЛА выполнен с возможностью соединения тросом с ведущим с/х агрегатом или может выполнять свободный полет без привязи, а также содержит ретранслятор корректирующих координатных поправок для наземных роботов, приемную и передающую антенны, а наземные роботы снабжены приемниками сигналов спутниковых систем навигации и приемниками сигналов коррекционных поправок. Обеспечивается повышение вариабельности конфигурации системы обработки полей за счет повышения надежности управления роботами путем изменения количества и специализации роботов, в т.ч. автономных с/х агрегатов, расширение области применения. 6 з.п. ф-лы, 1 ил.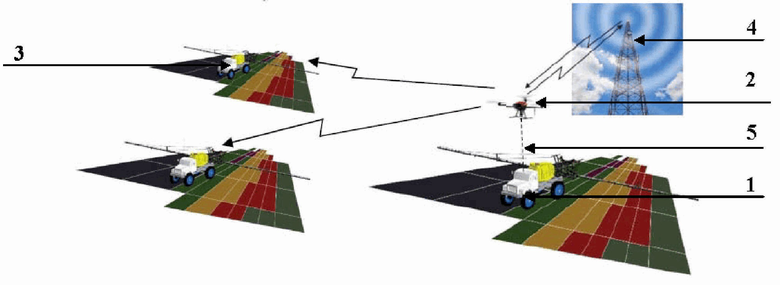
1. Автоматизированная система для внесения расходных материалов в процессе выполнения полевых сельскохозяйственных (с/х) работ, содержащая ведущий беспилотный летательный аппарат (БПЛА), ведущий с/х агрегат для управления группой наземных роботов, предназначенных для внесения расходных материалов, отличающаяся тем, что БПЛА выполнен с возможностью соединения тросом с ведущим с/х агрегатом или может выполнять свободный полет без привязи и содержит ретранслятор корректирующих координатных поправок для наземных роботов, приемную и передающую антенны, а наземные роботы снабжены приемниками сигналов спутниковых систем навигации и приемниками сигналов коррекционных поправок.
2. Система по п.1, отличающаяся тем, что длина троса составляет 20-30 метров.
3. Система по п.1, отличающаяся тем, что электропитание радиосвязной аппаратуры и самого ведущего БПЛА обеспечивается через кабель, соединяющий ведущий БПЛА и ведущий с/х агрегат.
4. Система по п.1, отличающаяся тем, что ведущий БПЛА содержит одну или несколько RGB или мультиспектральных камер.
5. Система по п.1, отличающаяся тем, что ведущий БПЛА содержит средства уклонения от препятствий в автоматическом режиме.
6. Система по п.1, отличающаяся тем, что ведущий БПЛА содержит средства дополнительного автоматического подъема на высоту при ослаблении или пропадании сигнала коррекционных поправок.
7. Система по п.1, отличающаяся тем, что ведущий БПЛА содержит средства передачи фото- и видеоизображений.
| СПОСОБ КООРДИНАЦИИ НАЗЕМНЫХ ПОДВИЖНЫХ АВТОМАТИЗИРОВАННЫХ УСТРОЙСТВ С ПОМОЩЬЮ ЕДИНОЙ ЦЕНТРАЛИЗОВАННОЙ УПРАВЛЯЮЩЕЙ СИСТЕМЫ | 2015 |
|
RU2691788C2 |
| Устройство управления движением и маневрированием группы роботизированных и автономных наземных транспортных средств на основе применения многосвязной адаптивной системы управления | 2020 |
|
RU2753778C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗИРОВАННОЙ АВИАЦИОННОЙ ХИМИЧЕСКОЙ ОБРАБОТКИ РАСТЕНИЙ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2015 |
|
RU2586142C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС УСТРОЙСТВ ДЛЯ УХОДА ЗА ПЛАНТАЦИЕЙ РАСТЕНИЙ И СПОСОБ УХОДА ЗА ПЛАНТАЦИЕЙ РАСТЕНИЙ | 2011 |
|
RU2477037C2 |
| US 20210182978 A1, 17.06.2021. | |||

