Изобретение относится к области навигации, более конкретно к навигации летательных аппаратов наземного базирования, и может быть использовано в пусковых комплексах для предстартовой подготовки беспилотного летательного аппарата (БПЛА), запускаемого с самоходной пусковой установки (СПУ).
Наиболее близким техническим решением, принятым в качестве прототипа, является способ предстартовой подготовки ракетного комплекса «Искандер-Э» (1).
Известный способ включает в себя доставку СПУ с БПЛА на неподготовленную в топогеодезическом отношении стартовую позицию (СП), определение координат местоположения СПУ на СП с помощью системы наземной навигации, включающей приемник сигналов спутниковых радионавигационных систем (СРНС), передачу измеренных координат бортовой системе навигации, включающей бортовой приемник сигналов СРНС (2), проведение предстартового контроля бортовой системы управления, последовательный перевод системы управления комплекса в режимы дежурства, готовности и старта БПЛА.
Недостатком данного способа является наличие погрешностей определения координат СПУ и БПЛА. Вследствие чего не обеспечивается необходимая точность прибытия БПЛА к месту назначения.
Известно наиболее близкое к предлагаемому устройство для предстартовой подготовки пускового комплекса, состоящего из самоходной установки и беспилотного летательного аппарата (1), содержащее систему наземной навигации с приемником сигналов спутниковой радионавигационной системы и вычислитель контрольно-пусковой аппаратуры самоходной установки, бортовой вычислитель, бортовой приемник сигналов спутниковой радионавигационной системы, причем вычислитель системы наземной навигации, вычислитель контрольно-пусковой аппаратуры и бортовой вычислитель подключены к шине мультиплексного канала информационного обмена, выход бортового приемника спутниковой радионавигационной системы подключен через нуль-модем (4) ко входу последовательного порта бортового вычислителя, подключенного через нуль-модем ко входу бортового приемника сигналов спутниковой радионавигационной системы, а информационно-управляющий выход приемника сигналов спутниковой радионавигационной системы самоходной установки подключен через нуль-модем ко входу последовательного порта вычислителя системы наземной навигации.
Данное устройство не формирует дифференциальные поправки приемником сигналов спутниковой радионавигационной системы самоходной установки, что не позволяет повысить точность прибытия БПЛА к месту назначения.
Для решения поставленной задачи повышения точности прибытия БПЛА к месту назначения предлагается при предстартовой подготовке пускового комплекса, состоящего из самоходной установки и беспилотного летательного аппарата, включающей доставку беспилотного летательного аппарата самоходной установки комплекса на неподготовленную в топогеодезическом отношении стартовую позицию, проведение предстартового контроля бортовой системы управления, последовательный перевод системы управления комплекса в режимы дежурства, пусковой готовности и старта беспилотного летательного аппарата, дополнительно в режиме предстартового контроля перевести приемник сигналов спутниковой радионавигационной системы самоходной установки в режим формирования координат опорной точки, в режиме пусковой готовности по координатам опорной точки сформировать дифференциальные поправки и перед стартом передать их на информационно-управляющий вход бортового приемника сигналов спутниковой радионавигационной системы.
Предпочтительным устройством для осуществления способа предстартовой подготовки пускового комплекса является устройство, содержащее систему наземной навигации с приемником сигналов спутниковой радионавигационной системы и вычислитель контрольно-пусковой аппаратуры самоходной установки, бортовой вычислитель, бортовой приемник сигналов спутниковой радионавигационной системы, причем вычислитель системы наземной навигации, вычислитель контрольно-пусковой аппаратуры и бортовой вычислитель подключены к шине мультиплексного канала информационного обмена, где выход бортового приемника сигналов спутниковой радионавигационной системы подключен через нуль-модем ко входу последовательного порта бортового вычислителя, выход которого подключен через нуль-модем ко входу бортового приемника сигналов спутниковой радионавигационной системы, а приемник сигналов спутниковой радионавигационной системы самоходной установки подключен информационно-управляющим выходом через нуль-модем ко входу последовательного порта вычислителя системы наземной навигации, кроме того, дополнительно выход последовательного порта вычислителя системы наземной навигации соединен через нуль-модем с информационно-управляющим входом приемника сигналов спутниковой радионавигационной системы самоходной установки, выход дифференциальных поправок которого соединен через нуль-модем с входом последовательного порта вычислителя контрольно-пусковой аппаратуры.
Использование времени предстартового контроля и дежурства пускового комплекса для автономного формирования дифференциальных поправок и последующий их учет в измерениях бортового приемника сигналов спутниковой радионавигационной системы, а также включение в предлагаемое устройство дополнительных связей позволяет снизить навигационную погрешность БПЛА в несколько раз.
Современные приемники сигналов спутниковой радионавигационной системы, работающие в дифференциальном режиме (3), обеспечивают субметровую точность. Часть приемников сигналов спутниковой радионавигационной системы (например, 14Ц821, 14Ц820, 14Ц825 - все разработки ФГУП «НИИ КП», Москва), предназначенных для наземной навигации, обладают способностью не только принимать дифференциальные поправки, но и формировать их. Для выполнения функции корректирующей опорной станции им достаточно знать координаты опорной точки с погрешностью, существенно меньшей погрешности разовых измерений приемника сигналов спутниковой радионавигационной системы (не принимающего дифференциальные поправки). Кроме этого современные приемники сигналов спутниковой радионавигационной системы имеют режим статистического накопления информации, в котором вычисляются средние по совокупности измерений значения координат. Перевод приемников сигналов спутниковой радионавигационной системы из режима навигационных определений в режим формирования дифференциальных поправок и другие режимы осуществляется через информационно-управляющий вход.
Предлагаемые изобретения иллюстрированы чертежами, на которых изображены:
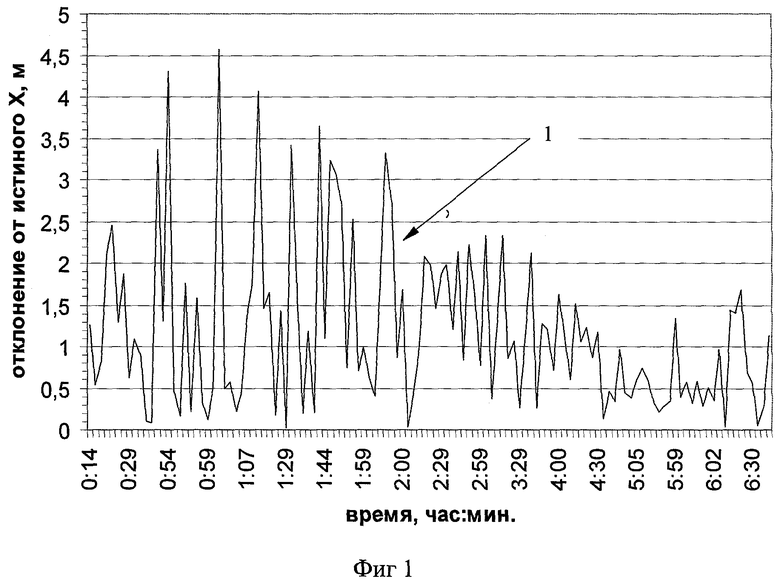
на фиг.1 - пример экспериментальной зависимости погрешности вычисления приемником сигналов спутниковой радионавигационной системы среднего значения координаты Х опорной точки от времени дежурства;
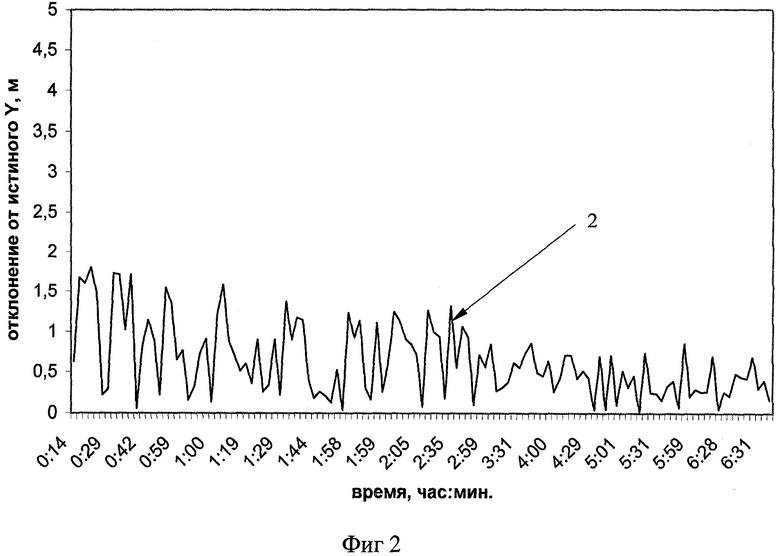
на фиг.2 - пример экспериментальной зависимости погрешности вычисления приемником сигналов спутниковой радионавигационной системы среднего значения координаты Y опорной точки от времени дежурства;
на фиг.3 - функциональная схема устройства.
Предлагаемый способ предстартовой подготовки пускового комплекса осуществляется в следующей последовательности.
Самоходная пусковая установка с беспилотным летательным аппаратом с помощью системы наземной навигации приезжает на неподготовленную в топогеодезическом отношении стартовую позицию и занимает неподвижное положение. При проведении предстартового контроля бортовой системы управления приемник сигналов спутниковой радионавигационной системы самоходной установки переводится в режим осреднения измеряемых координат. Предельная погрешность единичного измерения координат при приеме радионавигационных сигналов от 4-х навигационных спутников одной СРНС более 25 м. Частота измерений координат приемниками сигналов спутниковой радионавигационной системы, как правило, 1 или 10 Гц.
После проведения контроля бортовой системы управления пусковой комплекс переводится в режим штатного дежурства. Пусковой комплекс может находиться в режиме дежурства несколько часов, в течение которых приемник сигналов спутниковой радионавигационной системы самоходной установки продолжает осреднять текущие измерения координат. Время штатного дежурства пускового комплекса может составить сутки и более. Экспериментально показано, что осреднение координат уже в течение первых трех часов позволяет определить координаты (см. фиг 1) опорной точки с погрешностью, не превышающей 2.5 метра.
При переводе пускового комплекса в режим пусковой готовности средние значения координат местоположения самоходной установки на стартовой позиции передаются в бортовой вычислитель в качестве начальных координат для решения основного уравнения инерциальной навигации, приемник сигналов спутниковой радионавигационной системы самоходной установки переводится в режим формирования дифференциальных поправок, причем в качестве координат опорной точки принимаются средние значения координат СПУ:
 ,
,
где  - измеренное опорной станцией (приемником сигналов спутниковой радионавигационной системы самоходной установки, функционирующем в режиме формирования дифференциальных поправок) значение псевдодальности до i-го навигационного спутника;
- измеренное опорной станцией (приемником сигналов спутниковой радионавигационной системы самоходной установки, функционирующем в режиме формирования дифференциальных поправок) значение псевдодальности до i-го навигационного спутника;
 - значение псевдодальности между опорной станцией i-м спутником, вычисленное по известным координатам опорной точки.
- значение псевдодальности между опорной станцией i-м спутником, вычисленное по известным координатам опорной точки.
Дифференциальные поправки, сформированные приемником сигналов спутниковой радионавигационной системы самоходной установки непосредственно перед стартом, передаются в бортовой приемник сигналов спутниковой радионавигационной системы для коррекции его текущих измерений местоположения БПЛА на траектории полета. Чем точнее значения координат СПУ, полученные в результате осреднения текущих измерений, тем эффективней дифференциальная навигация.
Дифференциальные поправки имеют свойство постоянности на значительных участках поверхности. Экспериментально показано, что приемник сигналов спутниковой радионавигационной системы типа 14Ц821 (Москва, НИИ космического приборостроения) позволяет при известных координатах опорной точки сформировать дифференциальные поправки, позволяющие довести погрешность местоопределения различных мобильных объектов, расположенных в радиусе 300 км от самоходной установки и оснащенных приемниками сигналов спутниковой радионавигационной системы, довести до величин менее 3-5 м.
Дифференциальные поправки не «стареют» несколько минут, что позволяет в течение этого времени корректировать текущие измерения бортового приемника сигналов спутниковой радионавигационной системы на траектории полета дифференциальными поправками, сформированными перед пуском летательного аппарата приемником сигналов спутниковой радионавигационной системы самоходной установки.
Дифференциальные поправки обладают свойством терять свою актуальность с удалением приемника сигналов спутниковой радионавигационной системы от опорной точки, относительно которых они формируются. Но поскольку изменения значительной части погрешностей происходят медленно, и дальность полета БПЛА не превышает эффективную дальность применения дифференциальных поправок, то эффект снижения погрешности имеется не только на месте старта, но и в полете.
Предлагаемое устройство для предстартовой подготовки пускового комплекса, состоящего из самоходной установки 1 и беспилотного летательного аппарата 2, содержит систему наземной навигации 3, включающую приемник 4 сигналов спутниковой радионавигационной системы и вычислитель 5, вычислитель 6 контрольно-пусковой аппаратуры самоходной установки 1, бортовой вычислитель 7 и бортовой приемник 8 сигналов спутниковой радионавигационной системы. Вычислитель 5 системы наземной навигации 3, вычислитель 6 контрольно-пусковой аппаратуры и бортовой вычислитель 7 подключены к шине мультиплексного канала информационного обмена 9, выход бортового приемника 8 сигналов спутниковой радионавигационной системы подключен через нуль-модем 10 ко входу последовательного порта бортового вычислителя 7, выход которого подключен ко входу бортового приемника 8 сигналов спутниковой радионавигационной системы, а приемник 4 сигналов спутниковой радионавигационной системы самоходной установки 1 подключен через нуль-модем 11 информационно-управляющим выходом ко входу последовательного порта вычислителя 5 системы наземной навигации 3, при этом выход последовательного порта вычислителя 5 системы наземной навигации 3 соединен с информационно-управляющим входом приемника 4 сигналов спутниковой радионавигационной системы самоходной установки 1, выход дифференциальных поправок которого соединен через нуль-модем 12 с входом последовательного порта вычислителя 6 контрольно-пусковой аппаратуры.
Устройство работает следующим образом.
При приезде самоходной установки 1 пускового комплекса на стартовую позицию вычислитель 6 контрольно-пусковой аппаратуры по шине мультиплексного канала информационного обмена 9 передает в вычислитель 5 системы наземной навигации команду на перевод приемника сигналов спутниковой радионавигационной системы 4 самоходной установки 1 в режим осреднения измеряемых координат. Вычислитель 5 системы наземной навигации передает через нуль-модем 11 в приемник сигналов спутниковой радионавигационной системы 4 самоходной установки 1 соответствующую команду, после чего последний начинает осреднять текущие измерения местоположения неподвижной самоходной установки.
После окончания режима дежурства пускового комплекса вычислитель 5 системы наземной навигации по команде с вычислителя 6 контрольно-пусковой аппаратуры опрашивает приемник сигналов спутниковой радионавигационной системы 4 самоходной установки и передает средние значения координат в вычислитель 6 контрольно-пусковой аппаратуры по шине мультиплексного канала информационного обмена.
Вычислитель 6 контрольно-пусковой аппаратуры, используя результаты осреднения в качестве координат опорной точки, передает по шине мультиплексного канала информационного обмена 9 команду на перевод приемника сигналов спутниковой радионавигационной системы 4 самоходной установки в режим формирования дифференциальных поправок. Вычислитель 5 системы наземной навигации транслирует через нуль-модем 11 в приемник сигналов спутниковой радионавигационной системы 4 самоходной установки 1 соответствующую команду, после чего последний 4 начинает формировать дифференциальные поправки, сравнивая текущие измерения с координатами опорной точки, и передавать их через нуль-модем 12 в вычислитель 6 контрольно-пусковой аппаратуры, откуда они по шине мультиплексного канала информационного обмена поступают в бортовой вычислитель 7, а затем через нуль-модем 10 в бортовой приемник 8 сигналов спутниковой радионавигационной системы. Предлагается считать их постоянными в течение всего времени полета БПЛА или на начальном участке траектории, что позволяет скомпенсировать существенную часть погрешностей бортового приемника 8 сигналов спутниковой радионавигационной системы.
Реализация предлагаемого способа и устройства позволяет повысить точность прибытия БПЛА в заданный район до 10 раз по сравнению с аналогом.
Использованные источники
1. Высокоточные системы управления и приводы для вооружения и военной техники. Под редакцией В.Л.Солунина. - М.: Изд-во МГТУ им. Н.Э.Баумана, 1999, стр.291, 292.
2. Основы теории систем управления высокоточных ракетных комплексов сухопутных войск, авторов Б.Г.Гурского, М.А.Лющанова, Э.П.Спирина. Под редакцией В.Л.Солунина. - М.: Изд-во МГТУ им. Н.Э.Баумана, 2001, стр.138.
3. ГЛОНАСС. Принципы построения и функционирования. Под редакцией А.И.Перова, В.Н.Харисова. - М.: Радиотехника, 2005, 688 с.
4. Кокарев В.Н. Англо-русский толковый словарь терминов по сетевым технологиям. - Мир ПК. 1994, №8-10, 1995, №1-2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| Способ определения координат короткоживущего беспилотного летательного аппарата | 2020 |
|
RU2744723C1 |
| СИСТЕМА РАЗВЕДКИ НАЗЕМНЫХ ОБЪЕКТОВ И ЦЕЛЕУКАЗАНИЯ | 2016 |
|
RU2625691C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МАЛОРАЗМЕРНОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2820041C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
Изобретение относится к области навигации, более конкретно к навигации летательных аппаратов наземного базирования, и может быть использовано в пусковых комплексах для предстартовой подготовки беспилотного летательного аппарата (БПЛА), запускаемого с самоходной пусковой установки (СПУ). Технический результат - повышение точности определения координат. Способ заключается в доставке БПЛА с помощью СПУ на неподготовленную в топогеодезическом отношении стартовую позицию, в последовательном переводе системы управления комплекса в режимы предстартового контроля, дежурства, пусковой готовности и старта БПЛА. При этом непосредственно перед стартом формируют с помощью аппаратуры СПУ дифференциальные поправки и транслируют их бортовому приемнику сигналов спутниковой радионавигационной системы. Устройство для осуществления способа содержит в составе СПУ систему наземной навигации, систему формирования дифференциальных поправок и вычислитель контрольно-пусковой аппаратуры СПУ, а в составе БПЛА бортовой вычислитель и бортовой приемник сигналов спутниковой радионавигационной системы, связанные между собой шиной мультиплексного канала информационного обмена и нуль-модемом. Осуществление способа обеспечивается установлением дополнительных связей между названными объектами пускового комплекса. 2 н.п. ф-лы, 3 ил.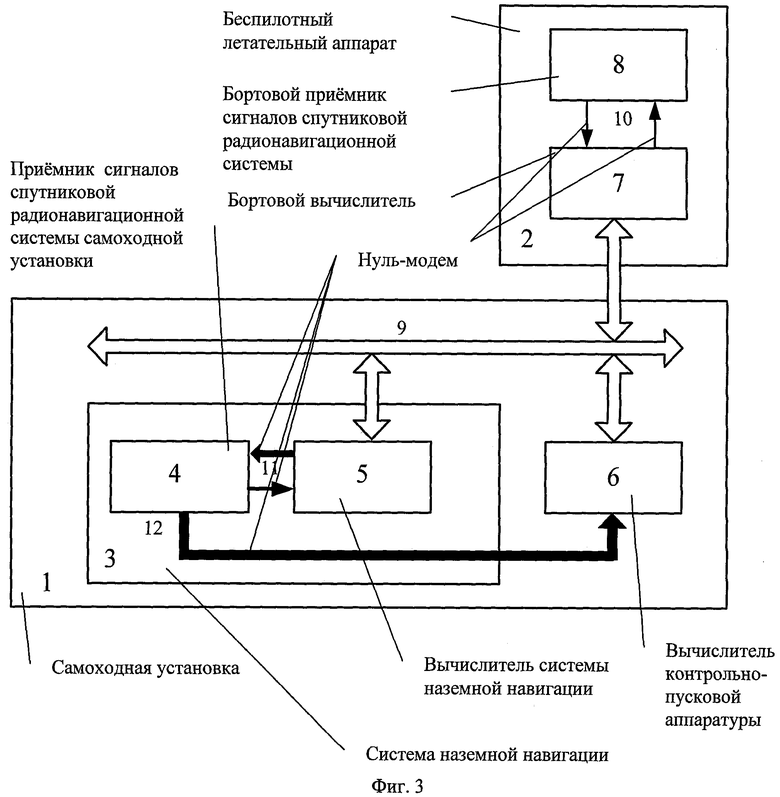
1. Способ предстартовой подготовки пускового комплекса, состоящего из самоходной установки и беспилотного летательного аппарата, включающий доставку беспилотного летательного аппарата самоходной установкой комплекса на неподготовленную в топогеодезическом отношении стартовую позицию, проведение предстартового контроля бортовой системы управления, последовательный перевод системы управления комплекса в режимы дежурства, пусковой готовности и старта беспилотного летательного аппарата, отличающийся тем, что дополнительно в режиме предстартового контроля переводят приемник сигналов спутниковой радионавигационной системы самоходной установки в режим формирования координат опорной точки, в режиме пусковой готовности по координатам опорной точки формируют дифференциальные поправки и перед стартом передают их на управляющий вход бортового приемника сигналов спутниковой радионавигационной системы.
2. Устройство предстартовой подготовки пускового комплекса, состоящего из самоходной установки и беспилотного летательного аппарата, содержащее систему наземной навигации с приемником сигналов спутниковой радионавигационной системы и вычислитель контрольно-пусковой аппаратуры самоходной установки, бортовой вычислитель, бортовой приемник сигналов спутниковой радионавигационной системы, причем вычислитель системы наземной навигации и вычислитель контрольно-пусковой аппаратуры подключены к шине мультиплексного канала информационного обмена, бортовой вычислитель подключен к шине мультиплексного канала информационного обмена самоходной установки, выход бортового приемника спутниковой радионавигационной системы подключен через нуль-модем к входу последовательного порта бортового вычислителя, выход которого подключен через нуль-модем ко входу бортового приемника сигналов спутниковой радионавигационной системы, а приемник сигналов спутниковой радионавигационной системы самоходной установки подключен информационно-управляющим выходом через нуль-модем ко входу последовательного порта вычислителя системы наземной навигации, отличающееся тем, что выход последовательного порта вычислителя системы наземной навигации соединен через нуль-модем с информационно-управляющим входом приемника сигналов спутниковой радионавигационной системы самоходной установки, выход дифференциальных поправок, которого соединен через нуль-модем с входом последовательного порта вычислителя контрольно-пусковой аппаратуры.
| Высокоточные системы управления и приводы для вооружения и военной техники | |||
| /Под редакцией В.Л.СОЛУНИНА | |||
| - М.: Изд-во МГТУ им | |||
| Н.Э.Баумана, 1999, с.291, 292 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПУСКОМ РАКЕТ С ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 1997 |
|
RU2109247C1 |
| US 5275354 A, 04.01.1994 | |||
| US 5042743 A, 27.08.1991 | |||
| ДИСК РОТОРА И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОЛИМЕРНОГО МАТЕРИАЛА | 2011 |
|
RU2540617C2 |

