Изобретение относится к технике обнаружения скрытых объектов и может быть использовано в системах поиска заглубленных ферромагнитных предметов типа неразорвавшихся боеприпасов для автоматизированной классификации объектов поиска в многоканальной магнитометрической системе по наличию и особенностям выявленных магнитных аномалий.
Известен способ автоматизированной робастной классификации радиосигналов по структурно-временным параметрам (RU 2450356 С2, МПК G06N 3/02, опубл. 10.05.2012), заключающийся в том, что по учебным данным, состоящим из векторов структурно-временных параметров сигналов различных классов, производится построение вероятностной нейронной сети с выбранным экспертным путем значением ширины функции потенциала, производится оценка плотности распределения вероятности известных классов радиосигналов в области неизвестного (классифицируемого) сигнала и неизвестный сигнал отождествляется с классом, имеющим наиболее плотное распределение вероятности в области неизвестного сигнала.
Данный способ не учитывает известные характеристики ферромагнитных объектов поиска и особенности геометрической формы ферромагнитных предметов типа неразорвавшихся боеприпасов.
Наиболее близким по технической сущности к предлагаемому является способ интеллектуальной обработки информации в нейронной сети (прототип - см. патент на изобретение RU 2427914 С1, МПК: G06N 3/02, опубл. 27.08.2011), заключающийся в подаче в двухслойную сеть с обратными связями, замыкающими двухслойные контуры с временем задержки единичных образов меньше времени невосприимчивости нейронов сети после их возбуждения, сигнала, разложенного на составляющие в базисе, согласованном с входным слоем сети, с каждой составляющей, преобразованной в последовательность единичных образов с частотой повторения как предварительно заданной функцией от амплитуды составляющей, представлении сигнала в виде последовательных совокупностей единичных образов в соответствии с предварительно заданными правилами его распознавания.
Недостатком данного способа является отсутствие возможности учета в нем известных характеристик ферромагнитных объектов поиска и особенностей геометрической формы ферромагнитных предметов типа неразорвавшихся боеприпасов и, в связи с этим, неприменимость его к задачам классификации заглубленных ферромагнитных предметов типа неразорвавшихся боеприпасов.
Задачей настоящего изобретения является расширение функциональных возможностей по интеллектуальной обработке информации нейронной сетью в многоканальной магнитометрической системе, уменьшение габаритных размеров и упрощение конструкции.
Техническим результатом изобретения является автоматизация и повышение робастности процесса классификации скрытых ферромагнитных предметов типа неразорвавшихся боеприпасов по особенностям структурных взаимосвязей параметров объектов поиска.
Суть данного способа заключается в том, что реальные ферромагнитные предметы, в том числе неразорвавшиеся боеприпасы, имеют полюса - положительный, откуда силовые линии магнитного поля выходят, и отрицательный, куда силовые линии входят, здесь концентрация силовых линий максимальная. Следовательно, вблизи этих точек магнитная индукция также максимальная, что и должно выявляться по карте магнитных аномалий. Как правило, полюса располагаются на крайних гранях максимального размера объекта в силу анизотропии формы. Определение местоположения полюсов предмета позволяет уточнить его ориентацию в грунте и оценить геометрическую форму. Подобная оценка возможна, если карата магнитных аномалий построена с достаточно высокой точностью, что обеспечивается применением многоканальной магнитометрической системы (ММС) для реализации, которой необходимо одновременно регистрировать сигналы с нескольких магнитометров - чувствительных элементов, закрепленных на единой «жесткой» конструкции (раме), расположенных на некотором расстоянии друг от друга перпендикулярно траектории движения.
Для многоканальной магнитометрической системы реализуется структура нейронной сети, учитывающей, кроме ферромагнитной массы и глубины залегания, параметры геометрической формы реальных объектов поиска типа неразорвавшихся боеприпасов. На основе обучающей выборки статистических данных объектов поиска и классифицирующей функции по трем параметрам проводится обучение сети.
С помощью многоканальной магнитометрической системы, движимой и управляемой пешим оператором, состоящей из 4-х линейно расположенных магнитометрических чувствительных элементов с феррозондовыми датчиками производится измерение и запись амплитуд магнитной индукции по ходу движения, производится построение карты магнитных аномалий с массивом данных измеренных значений датчиками системы. Далее по измеренным значениям амплитуд магнитной индукции рассчитываются значения глубины залегания, магнитного момента. По расстоянию между измеренными многоканальной магнитометрической системой максимумами амплитуд определяется длина объекта.
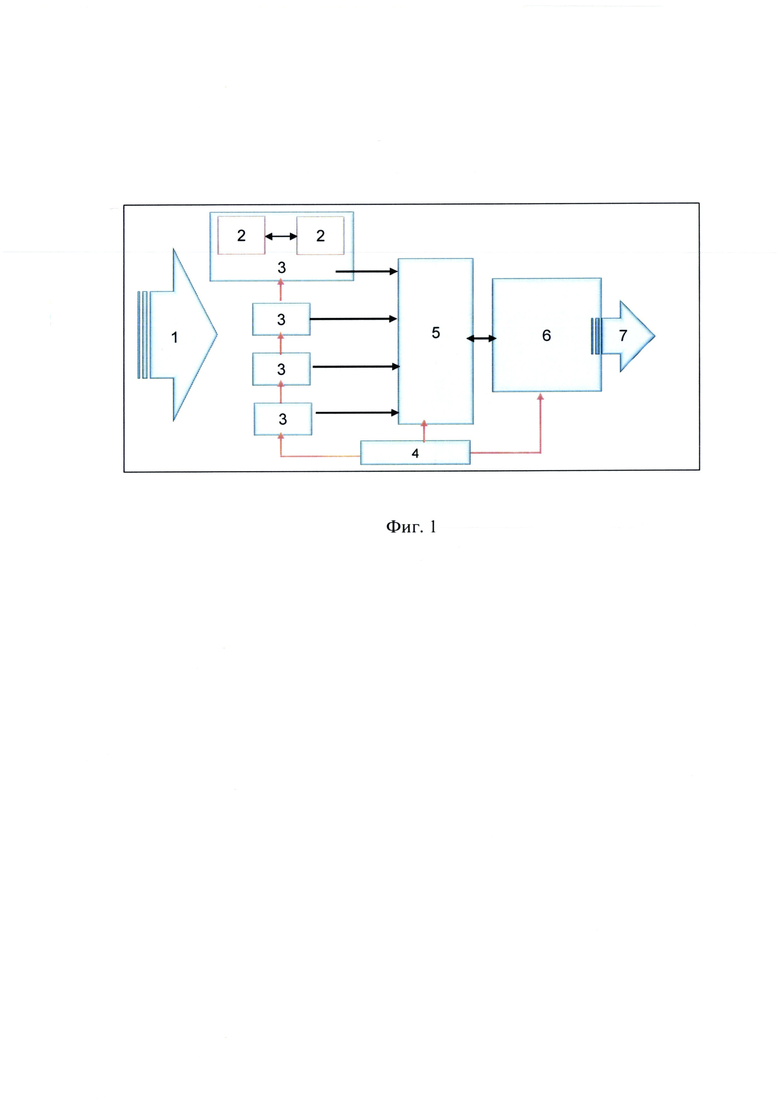
Суть изобретения поясняется чертежами, где на фиг. 1 приведена структурная схема многоканальной магнитометрической системы с нейронной сетью, на фиг. 2 изображена структурная схема нейронной сети классификации объектов поиска в многоканальной магнитометрической системе, на фиг. 3 представлена схема продвижения совокупностей единичных переменных образов объектов поиска вдоль слоев в нейронной сети в многоканальной магнитометрической системе, на фиг. 3 - эволюция функции классификации ферромагнитных объектов типа неразорвавшихся боеприпасов в процессе обучения, на фиг. 4 - обучающая выборка с усредненными значениями статистических данных объектов поиска типа неразорвавшихся боеприпасов.
Способ осуществляется следующим образом. С применением многоканальной магнитометрической системы (фиг. 1), движимой и управляемой пешим оператором, над объектом поиска 1 производится измерение амплитуд магнитной индукции феррозондовыми датчиками 2, размещенными в 4-х линейно расположенных магнитометрических чувствительных элементах 3 и запись полученных данных в контроллер массива данных 5. Далее по измеренным значениям амплитуд магнитной индукции в контроллере массива данных 5 рассчитываются значения глубины залегания, магнитного момента. По расстоянию между измеренными многоканальной магнитометрической системой максимумами амплитуд определяется длина объекта. Полученные значения данных по глубине залегания, магнитного момента и длины объекта поступают на входные узлы нейронной сети 6. На экране вывода результатов 7 отображаются результаты классификации. Энергопитание всей системы осуществляется от блока питания 4.
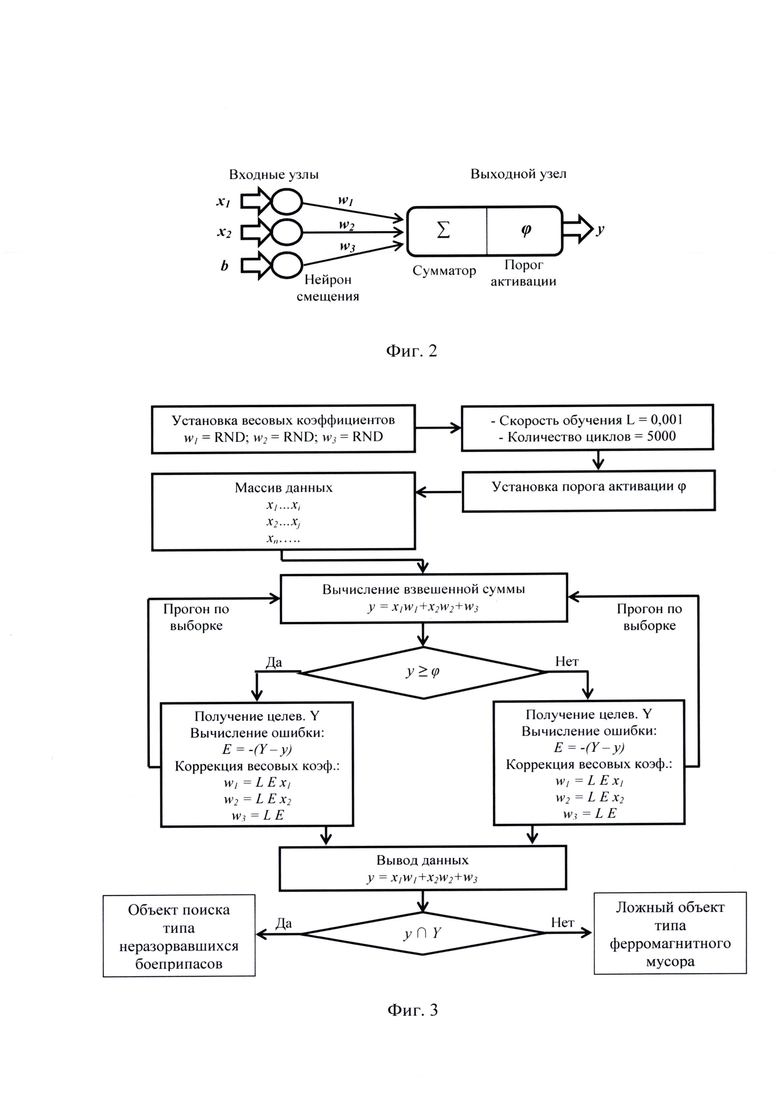
Предложенная структурная схема нейронной сети (фиг. 2) классификации объектов поиска в многоканальной магнитометрической системе имеет функцию классификации по трем параметрам, которая имеет следующий вид:

где у - глубина залегания объектов поиска типа неразорвавшихся боеприпасов, м (в данном случае целевое значение, которое может меняться), x1 - магнитный момент М, Ам2, х2 - длина объекта боеприпас, м, х3 - пороговое значение магнитного момента М, Ам2, w1, w2, w3 - весовые коэффициенты.
Для корректировки результата применяется функция ошибки:

После определения ошибки Е проводится обновление коэффициентов и обучение классифицирующей функции через их взаимосвязь:

где W - искомое значение весового коэффициента, Δw1 - шаг изменения весового коэффициента.
В многоканальной магнитометрической системе для согласования весовых коэффициентов и уменьшения ошибки Е с каждым проходом цикла в алгоритме программы функция ошибки имеет вид:

где wij - весовой коэффициент связи нейронов в цепи. Отсюда  (тут и далее хш - количество входов сети).
(тут и далее хш - количество входов сети).


Сумматор (фиг. 2) агрегирует все входные сигналы во взвешенную сумму, далее для ее обработки применяется функция активации по порогу превышения М от уровня магнитного мусора.
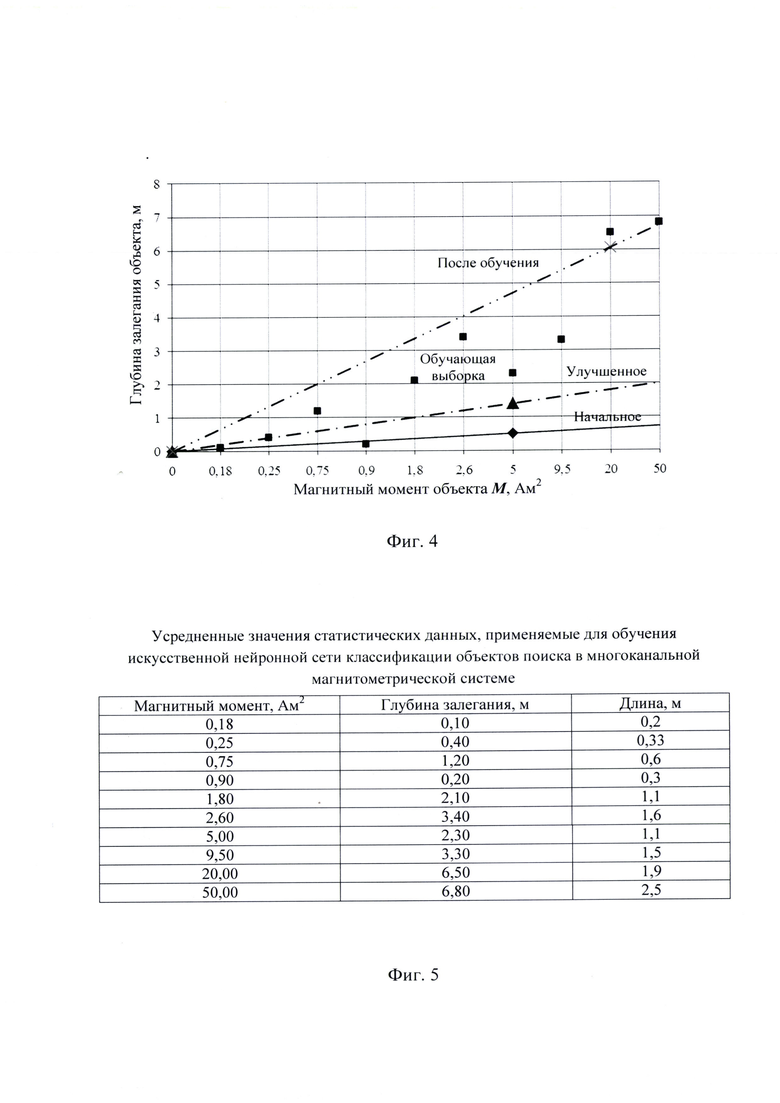
Схема продвижения совокупностей единичных переменных образов объектов поиска вдоль слоев в нейронной сети в многоканальной магнитометрической системе на основе искусственной нейронной сети (фиг. 1) в зависимости от данных по магнитному моменту, глубине залегания и параметров геометрии формы, показана на фиг. 3.
Вначале запуска работы нейронной сети (фиг. 3) устанавливаются из заданного интервала значения весовых коэффициентов, задается скорость обучения, количество циклов обучения и порог активации. После каждого прохода через массив данных обучающей выборки (фиг. 5) производится вычисление взвешенной суммы и сравнение ее значения с заданным порогом активации. После производится вычисление ошибки и коррекция весовых коэффициентов (фиг. 4). В случае превышения порога активации объект, по совокупности структурной связи параметров, относится классифицирующей функцией к типу неразорвавшихся боеприпасов. В противном случае объект классифицируется, как ферромагнитный мусор (фиг. 3). Результат классификации отображается на экране вывода результатов 7 многоканальной магнитометрической системы (фиг. 1).
Способ позволяет после обучения нейронной сети по измеренным многоканальной магнитометрической системой значениям амплитуд магнитной индукции предсказывать в нейронной сети значения переменной класса для случаев, в которых за ней не осуществлялось наблюдение (использование данных измерений в полевых условиях) и далее проводить классификацию входных данных по принадлежности к объектам поиска типа неразорвавшихся боеприпасов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТРИЧЕСКИЙ ДАТЧИК | 2021 |
|
RU2757650C1 |
| Способ поиска затонувшего радиационного источника автономным необитаемым подводным аппаратом | 2023 |
|
RU2825830C1 |
| СПОСОБ ПОВЕРКИ МАГНИТОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2012 |
|
RU2503026C1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2012 |
|
RU2525644C2 |
| Способ обнаружения дефектов трубопроводов и устройство для его осуществления | 2023 |
|
RU2822335C1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО МАГНИТОМЕТРИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ МЕТАЛЛА ТРУБОПРОВОДА | 2011 |
|
RU2460068C1 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО МАГНИТОМЕТРИЧЕСКОГО КОНТРОЛЯ СОСТОЯНИЯ МЕТАЛЛА ТРУБОПРОВОДА | 2006 |
|
RU2306554C1 |
| СПОСОБ ОЦЕНКИ ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ ДЕФЕКТОВ СТЕНКИ ТРУБНОЙ СЕКЦИИ И СВАРНЫХ ШВОВ ПО ДАННЫМ МАГНИТНОГО ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА С ПОМОЩЬЮ УНИВЕРСАЛЬНОЙ НЕЙРОСЕТЕВОЙ МОДЕЛИ, ПОДХОДЯЩЕЙ ДЛЯ ДЕФЕКТОСКОПОВ С РАЗЛИЧНЫМИ ДИАМЕТРАМИ И МАГНИТНЫМИ СИСТЕМАМИ | 2015 |
|
RU2591584C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОЙ МАГНИТНОЙ АНОМАЛИИ | 2007 |
|
RU2411550C2 |
| Система обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта | 2021 |
|
RU2780607C1 |
Изобретение относится к способу автоматизированной классификации объектов поиска в многоканальной магнитометрической системе на основе искусственной нейронной сети. Технический результат заключается в повышении робастности процесса классификации скрытых ферромагнитных предметов типа неразорвавшихся боеприпасов по особенностям структурных взаимосвязей параметров объектов поиска. В способе многоканальной магнитометрической системой, движимой и управляемой пешим оператором, над объектом поиска производится измерение амплитуд магнитной индукции феррозондовыми датчиками, размещенными в четырех линейно расположенных магнитометрических чувствительных элементах и запись полученных данных в контроллер массива данных, где по измеренным значениям рассчитываются значения глубины залегания, магнитного момента, а по расстоянию между измеренными максимумами амплитуд определяется длина объекта, и далее поступают на входные узлы нейронной сети, где после обучения нейронной сети, по измеренным значениям сигналов производится классификация по трем параметрам ферромагнитных объектов по принадлежности к объектам поиска типа неразорвавшихся боеприпасов. 5 ил.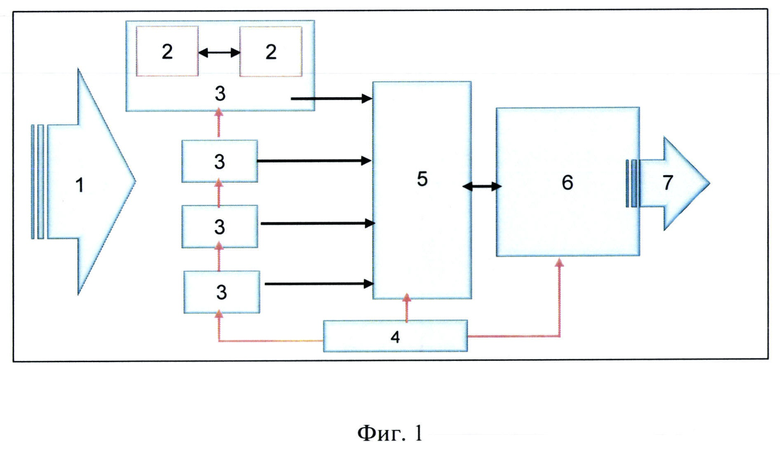
Способ автоматизированной классификации объектов поиска в многоканальной магнитометрической системе на основе искусственной нейронной сети, включающей три входных узла с нейронами, где первый и второй нейрон предназначены для входных значений магнитного момента и длины объекта, третий нейрон для коррекции ошибки по порогу превышения магнитного момента, и один выходной узел сравнения с целевым значением глубины залегания объекта с сумматором и нейроном активации по заданному порогу, заключающийся в том, что многоканальной магнитометрической системой, движимой и управляемой пешим оператором, над объектом поиска производится измерение амплитуд магнитной индукции феррозондовыми датчиками, размещенными в четырех линейно расположенных магнитометрических чувствительных элементах, и запись полученных данных в контроллер массива данных, где по измеренным значениям рассчитываются значения глубины залегания, магнитного момента, а по расстоянию между измеренными максимумами амплитуд определяется длина объекта, и далее поступают на входные узлы нейронной сети, где после обучения нейронной сети, по измеренным значениям сигналов производится классификация по трем параметрам ферромагнитных объектов по принадлежности к объектам поиска типа неразорвавшихся боеприпасов.
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ОБРАБОТКИ ИНФОРМАЦИИ В НЕЙРОННОЙ СЕТИ | 2010 |
|
RU2427914C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ РОБАСТНОЙ КЛАССИФИКАЦИИ РАДИОСИГНАЛОВ ПО СТРУКТУРНО-ВРЕМЕННЫМ ПАРАМЕТРАМ | 2010 |
|
RU2450356C2 |
| ОБНАРУЖЕНИЕ СКРЫТОГО ОБЪЕКТА | 2004 |
|
RU2371735C2 |
| Телефон-автомат | 1928 |
|
SU9114A1 |
| CN 110458129 B, 23.06.2020 | |||
| US 11557115 B2, 17.01.2023. | |||

