Изобретение относится к области гироскопического приборостроения и может найти применение в системах автоматического управления, например, летательными аппаратами.
Известен блок демпфирующих гироскопов БДГ-30-1, (ОАО «Уральский приборостроительный завод», г. Екатеринбург), состоящий из трех ортогонально расположенных в корпусе датчиков угловых скоростей (ДУС) на базе двухстепенных гироскопов, по одному на каждую ось измерения.
Однако у блока БДГ-30-1 не указан способ контроля вращения гиромоторов, как основного функционального узла, что снижает его надежность и, в конечном счете, точность формирования выходных сигналов.
Известен способ контроля правильной работы гиромоторов, реализованный в блоке демпфирующих гироскопов БДГ-25, взятый за прототип (ОАО «Арзамасский приборостроительный завод им. П.И. Пландина», «Техническое описание и инструкция по эксплуатации блоков демпфирующих гироскопов БДГ-25 и БДГ-26»). Способ основан на взаимосвязи угловой скорости вращения и фазовым сдвигом между напряжением и током в фазовых обмотках гиромоторов, на которые подают трехфазные напряжения через первичные обмотки первого и второго трехфазных импульсных трансформаторов, вторичные обмотки которых одновременно охватывают три первичные обмотки, в них осуществляются операции суммирования и дифференцирования. Далее над импульсными сигналами осуществляют операцию логического сложения по схеме «И», и серии импульсов сравнивают по взаимному перекрытию и, если в течение заданного времени перекрытие сохраняется, то формируют сигнал исправности, в противном случае формируют сигнал неисправности.
Недостатком способа, примененного в БДГ, который реализован во встроенном блоке контроля вращения гиромоторов аналогового типа, является зависимость работы способа от температуры, отсутствие возможности настройки на различные диапазоны по скорости.
Технический результат, на достижение которого направлено изобретение, заключается в повышении точности определения взаимного соотношения угловых скоростей вращения гиромоторов, что, в конечном счете, способствует повышению надежности контроля правильной работы блока БДГ в целом.
Технический результат достигается тем, что в способе, основанном на взаимосвязи угловой скорости вращения и фазового сдвига между напряжением и током в фазовых обмотках гиромоторов, при этом токи фазных обмоток дифференцируют в моменты перехода значений токов через ноль, и получают серии импульсов, которые суммируют отдельно для трех фаз каждого гиромотора, и оценивают взаимное положение импульсов во времени, новым является то, что из последовательности импульсов, полученных в результате дифференцирования токов в фазных обмотках, формируют последовательность импульсов в виде меандра, у которых по переднему и заднему фронтам измеряют соответственно время начала и окончания импульсов и определяют параметр исправной работы гиромоторов по анализу измеренных времен по формуле

где  время начала и окончания импульсов напряжения вторичных обмоток первого и второго импульсных трансформаторов,
время начала и окончания импульсов напряжения вторичных обмоток первого и второго импульсных трансформаторов,
при этом  , соответствует исправной работе гиромоторов, а
, соответствует исправной работе гиромоторов, а  соответствует неисправной работе гиромоторов.
соответствует неисправной работе гиромоторов.
Существо способа поясняется чертежами, представленными на фиг.1 и фир.2.
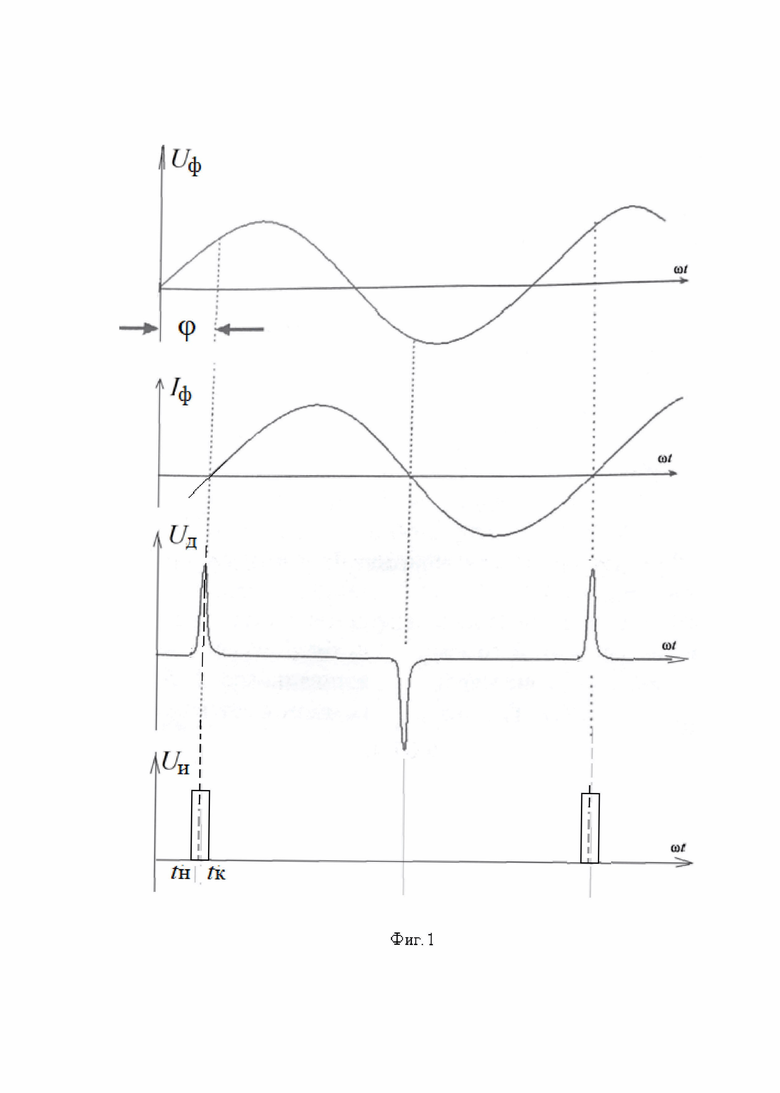
На фиг. 1 приведены графики, поясняющие формирование импульсов для одной фазы одного из гиромоторов, входящих в блок демпфирующих гироскопов. На фиг. 2 приведены варианты возможного взаимного расположения импульсов во времени.
На фиг.1 и фиг.2 приняты следующие обозначения:
 фазное напряжение в одной из фаз гиромотора, в двух других фазах напряжения будут сдвинуты на
фазное напряжение в одной из фаз гиромотора, в двух других фазах напряжения будут сдвинуты на  электрических градусов соответственно;
электрических градусов соответственно;
 ток в одной из фаз гиромотора;
ток в одной из фаз гиромотора;
 фазовый сдвиг между напряжением и током в фазе гиромотора, зависящий от угловой скорости вращения ротора гиромотора;
фазовый сдвиг между напряжением и током в фазе гиромотора, зависящий от угловой скорости вращения ротора гиромотора;
 импульсное напряжение, получаемое после операции дифференцирования;
импульсное напряжение, получаемое после операции дифференцирования;
 импульсное напряжение, преобразованное в меандр;
импульсное напряжение, преобразованное в меандр;
 время начала и окончания импульсов напряжения меандра;
время начала и окончания импульсов напряжения меандра;
 круговая частота питающего напряжения.
круговая частота питающего напряжения.
На фиг. 2 приведены варианты возможного взаимного расположения импульсов меандра в увеличенном по времени масштабе, на которой приняты следующие обозначения:
 время начала и окончания импульсов напряжения меандра для первого гиромотора;
время начала и окончания импульсов напряжения меандра для первого гиромотора;
 время начала и окончания импульсов напряжении меандра для второго гиромотора;
время начала и окончания импульсов напряжении меандра для второго гиромотора;
 параметр исправной работы
параметр исправной работы
Блок демпфирующих гироскопов (БДГ) состоит из двух датчиком угловых скоростей, оси чувствительности которых параллельны. На каждую ось самолета для измерения угловых скоростей (например, крена) устанавливают несколько блоков демпфирующих гироскопов. В изобретении речь об одном БДГ и способе определения исправной его работы, по соотношению угловых скоростей вращения роторов гиромоторов. При этом используется свойство, определяющее зависимость фазового сдвига  между фазовым напряжением
между фазовым напряжением  и током в фазе
и током в фазе  и угловой скоростью вращения ротора. Для нормальной работы БДГ угловые скорости двух гиромоторов должны отличаться не более чем на заданную величину (фиг.1, графики и).
и угловой скоростью вращения ротора. Для нормальной работы БДГ угловые скорости двух гиромоторов должны отличаться не более чем на заданную величину (фиг.1, графики и).
Предлагаемый способ можно представить из последовательности этапов:
1. Формируют производную от тока в каждой фазе гиромотора в районе, когда значение тока меняет знак, при этом получаем положительные и отрицательные импульсы (фиг.1, график  .
.
2. Отсекают отрицательные импульсы, а из положительных импульсов формируют импульсы типа меандр, при этом сохраняют временные параметры, а амплитуду устанавливают порядка 3В для работы с микроконтроллером (фиг.1, график  .
.
3. Импульсы для трех фаз суммируют, т.к. необходимо иметь информацию о токах в каждой фазе.
4. Измеряют временные параметры импульсов фиг.2, где импульсы приведены в увеличенном масштабе.
При этом рассмотрены следующие варианты:
фиг.2а – импульсы, определяющие работу первого гиромотора, опережают импульсы, определяющие работу второго гиромотора, но  при этом фазовые сдвиги отличаются настолько, что отличие угловых скоростей роторов первого и второго гиромоторов находятся в заданном диапазоне и, следовательно, параметр
при этом фазовые сдвиги отличаются настолько, что отличие угловых скоростей роторов первого и второго гиромоторов находятся в заданном диапазоне и, следовательно, параметр  т.е. БДГ функционирует исправно;
т.е. БДГ функционирует исправно;
фиг.2б – импульсы, определяющие работу первого гиромотора, отстают от импульсов, определяющих работу второго гиромотора, но  при этом фазовые сдвиги отличаются настолько, что отличие угловых скоростей роторов первого и второго гиромоторов находятся в заданном диапазоне и, следовательно, параметр т.е. БДГ функционирует исправно;
при этом фазовые сдвиги отличаются настолько, что отличие угловых скоростей роторов первого и второго гиромоторов находятся в заданном диапазоне и, следовательно, параметр т.е. БДГ функционирует исправно;
фиг.2в – импульсы, определяющие работу второго гиромотора, опережают импульсы, определяющие работу первого гиромотора настолько, что при этом фазовые сдвиги отличаются настолько, что отличие угловых скоростей роторов первого и второго гиромоторов не находится в заданном диапазоне и, следовательно, параметр
при этом фазовые сдвиги отличаются настолько, что отличие угловых скоростей роторов первого и второго гиромоторов не находится в заданном диапазоне и, следовательно, параметр  т.е. БДГ функционирует неисправно;
т.е. БДГ функционирует неисправно;
фиг.2г – импульсы, определяющие работу первого гиромотора, опережают импульсы, определяющие работу второго гиромотора настолько, что при этом фазовые сдвиги отличаются настолько, что отличие угловых скоростей роторов первого и второго гиромоторов не находится в заданном диапазоне и, следовательно, параметр т.е. БДГ функционирует неисправно.
при этом фазовые сдвиги отличаются настолько, что отличие угловых скоростей роторов первого и второго гиромоторов не находится в заданном диапазоне и, следовательно, параметр т.е. БДГ функционирует неисправно.
Анализируя четыре возможных ситуации расположения на оси времени импульсов для двух гиромоторов, можно записать обобщенную формулу, определяющую исправную работу двух гиромоторов, а, следовательно, и всего БДГ в целом:

При этом не имеет значения, какой гиромотор работает неправильно, главное определить неисправный БДГ и отключить его от системы управления самолетом.
Реализовать данный способ на практике возможно только с применением микроконтроллера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения исправной работы гиромоторов блока демпфирующих гироскопов | 2023 |
|
RU2803706C1 |
| Система формирования выходного сигнала блоков демпфирующих гироскопов | 2017 |
|
RU2676049C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2101749C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| УСТРОЙСТВО для КОНТРОЛЯ СКОРОСТИ ВРАЩЕНИЯ МАШИН с ЛиССИВНЫМ РОТОРОМ | 1972 |
|
SU335611A1 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| СПОСОБ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1994 |
|
RU2117917C1 |
| Способ управления шаговым двигателем и устройство для его осуществления | 1985 |
|
SU1310993A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ПОДВИЖНОГО ОБЪЕКТА С ПОМОЩЬЮ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2111455C1 |
Изобретение относится к точному приборостроению, а именно к гироскопической технике, и может найти применение в системах автоматического управления, например, летательными аппаратами при построении систем контроля блоков демпфирующих гироскопов. Способ основан на взаимосвязи угловой скорости вращения и фазового сдвига между напряжением и током в фазовых обмотках гиромоторов, при этом токи фазных обмоток дифференцируют в моменты перехода значений токов через ноль, и получают серии импульсов, которые суммируют отдельно для трех фаз каждого гиромотора и из последовательности импульсов, полученных в результате дифференцирования токов в фазных обмотках, формируют последовательность импульсов типа меандр, у которых по переднему и заднему фронтам измеряют соответственно время начала и окончания импульсов и определяют параметр исправной работы гиромоторов по анализу измеренных времен. Технический результат заключается в повышении точности определения взаимного соотношения угловых скоростей вращения гиромоторов, что, в конечном счете, способствует повышению надежности контроля правильной работы блока БДГ в целом. 2 ил.
Способ определения исправной работы гиромоторов блока демпфирующих гироскопов, основанный на взаимосвязи угловой скорости вращения ротора и фазового сдвига между напряжением и током в фазных обмотках первого и второго гиромоторов, при этом токи фазных обмоток дифференцируют в моменты перехода значений токов через ноль, и получают серии импульсов, которые суммируют отдельно для трех фаз каждого гиромотора, и оценивают взаимное положение импульсов во времени, отличающийся тем, что из последовательности импульсов, полученных в результате дифференцирования токов в фазных обмотках, формируют последовательность импульсов типа меандр, у которых по переднему и заднему фронтам измеряют соответственно время начала и окончания импульсов и определяют параметр исправной работы гиромоторов по анализу измеренных времен по формуле

где  время начала и окончания импульсов напряжения типа меандр для первого и второго гиромоторов,
время начала и окончания импульсов напряжения типа меандр для первого и второго гиромоторов,
при этом  соответствует исправной работе гиромоторов, а
соответствует исправной работе гиромоторов, а  соответствует неисправной работе гиромоторов.
соответствует неисправной работе гиромоторов.
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| Способ контроля исправности интегрированных блоков датчиков | 2017 |
|
RU2672311C1 |
| Приспособление для раскройки перчаток | 1929 |
|
SU17589A1 |
| CN 213363808 U, 04.06.2021 | |||
| US 0006834528 B2, 28.12.2004. | |||
