ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе и способу определения координат местоположения. В частности, изобретение относится к способу и системе определения координат местоположения с использованием двух или более одновременно действующих методов определения координат местоположения, реализуемых в глобальной навигационной спутниковой системе.
УРОВЕНЬ ТЕХНИКИ
Во многих случаях для определения координат местоположения, например, геодезического прибора, транспортного средства или им подобных объектов, используют глобальные навигационные спутниковые системы, такие как GPS, ГЛОНАСС или GALILEO. Такие глобальные навигационные спутниковые системы (ГНСС) основаны на приеме сигналов со спутников.
Требования к управлению транспортным средством или навигацией, например, в сельском хозяйстве, в горной промышленности, грузовым автомобилем или на железной дороге, мало отличаются от тех, которые предполагаются при наблюдении за перемещением транспортного средства, в том числе существует и такое строгое требование, как возможность непрерывного определения координат местоположения объекта. Однако при непрерывном определении координат местоположения транспортного средства могут возникать определенные трудности.
В сельском хозяйстве ГНСС используют для управления перемещением по заданному маршруту трактора, комбайна или им подобного транспортного средства. Такое управление перемещением можно осуществлять через механизмы (далее - автоматические системы рулевого управления), которыми непосредственно управляют транспортным средством и удерживают его на маршруте, или через дисплей, предназначенный в помощь водителю для управления транспортным средством по заданному маршруту.
Существуют ГНСС, в которых используют разные методы определения координат местоположения. Разные методы определения координат местоположения имеют разную степень точности и достоверности.
При управлении перемещением транспортного средства, в частности с использованием автоматических систем рулевого управления транспортным средством в сельском хозяйстве и горной промышленности, требуется высокоточное определение координат местоположения этого транспортного средства. Одним из таких методов является дифференциальный метод определения координат местоположения подвижной станции с использованием базовой станции и радиомодема в режиме реального времени с использованием фазовых измерений (Real Time Kinematic или RTK-метод). Спутниковая радионавигация, использующая RTK-метод, реализует определение координат местоположения на основе фазовых измерений сигналов со спутника систем GPS, ГЛОНАСС, GALILEO и им подобных систем, где для повышения точности определения координат местоположения одна или несколько базовых станций обеспечивают возможность внесения поправок в режиме реального времени.
На практике в системах с определением координат местоположения RTK-методом используют один или более приемников базовой станции и мобильный приемник, установленный на каждом транспортном средстве, при этом с базовой станции (или базовых станций) на приемник подвижного объекта поступают данные фазовых измерений со спутника.
Это позволяет с высокой точностью вычислять значения координат относительного местоположения транспортного средства. Однако погрешность в вычислении значений координат абсолютного местоположения транспортного средства до сих пор такая же, как при определении координат местоположения базовой станции.
Погрешность в определении координат местоположения, имеющая место при определении координат местоположения с низкой точностью, таким как фазовый метод определения псевдодальности (Relative Pseudorange Delta-Phase) или RPDP-метод, обычно гораздо больше, чем погрешность при определении координат местоположения с высокой точностью, таким как RTK-метод, однако определение координат местоположения с низкой точностью является более достоверным, поскольку есть возможность более частого определения этих координат. Хотя значение погрешности при определении координат местоположения RPDP-методом больше, чем при определении координат местоположения RTK-методом, она имеет высокую степень автокорреляции и изменяется относительно медленно в короткие промежутки времени.
Когда определение координат местоположения с высокой точностью становится невозможным, необходим незаметный (плавный) переход к управлению транспортным средством с использованием координат его местоположения, вычисленных с низкой точностью, которые являются более достоверными. Однако поскольку при каждом вычислении могут быть разные погрешности, переход от вычисления, выполненного одним методом, к вычислению, выполненному другим методом, может привести к тому, что известно в области техники как "скачок координат", то есть скачкообразному изменению получаемых значений координат.
Очевидно, что скачек значений координат местоположения в системе автоматического рулевого управления может привести к резкому изменению направления движения, поскольку с точки зрения системы определения координат местоположения такой скачок означает, что транспортное средство внезапно изменило местоположение, и система рулевого управления, соответственно, попытается вернуть транспортное средство назад на заданный маршрут.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Одним объектом настоящего изобретения является способ определения координат местоположения, включающий вычисление значений координат местоположения с низкой точностью и, в случае если определение координат местоположения с высокой точностью невозможно, применение поправки к вычисленным с низкой точностью значениям координат местоположения для определения итоговых значений координат местоположения, при этом в качестве поправки используют разницу между значениями координат местоположения, вычисленными с низкой точностью, и значениями координат местоположения, вычисленными с высокой точностью, в момент времени, когда определение значений координат местоположения с высокой точностью было в последний раз возможно.
Дополнительно, настоящее изобретение относится к способу определения координат местоположения, включающему вычисление значений координат местоположения с высокой точностью, вычисление значений координат местоположения с низкой точностью, обновление поправки, при этом в качестве поправки используют разницу между значениями координат местоположения, вычисленными с низкой точностью, и значениями координат местоположения, вычисленными с высокой точностью, и передачу итоговых значений координат местоположения в виде значений координат местоположения, вычисленных с высокой точностью.
Также изобретение относится к системе определения координат местоположения для транспортного средства, включающей блок определения координат местоположения с высокой точностью, выполненный с возможностью вычисления с высокой точностью значений координат местоположения транспортного средства, блок определения координат местоположения с низкой точностью, выполненный с возможностью вычисления с низкой точностью значений координат местоположения транспортного средства, и корректирующий блок, связанный с блоком определения координат местоположения с высокой точностью и с блоком определения координат местоположения с низкой точностью, при этом корректирующий блок выполнен с возможностью вычисления итоговых значений координат местоположения для управления транспортным средством по заданному маршруту, при этом корректирующий блок дополнительно выполнен с возможностью хранения поправки, соответствующей разнице между значениями координат местоположения, вычисленными с высокой точностью, и значениями координат местоположения, вычисленными с низкой точностью, в том случае когда определение координат местоположения с высокой точностью является достоверным.
Дополнительные особенности настоящего изобретения станут понятны из последующего детального описания примеров его осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предпочтительные примеры осуществления изобретения будут описаны более детально ниже со ссылкой на соответствующие чертежи.
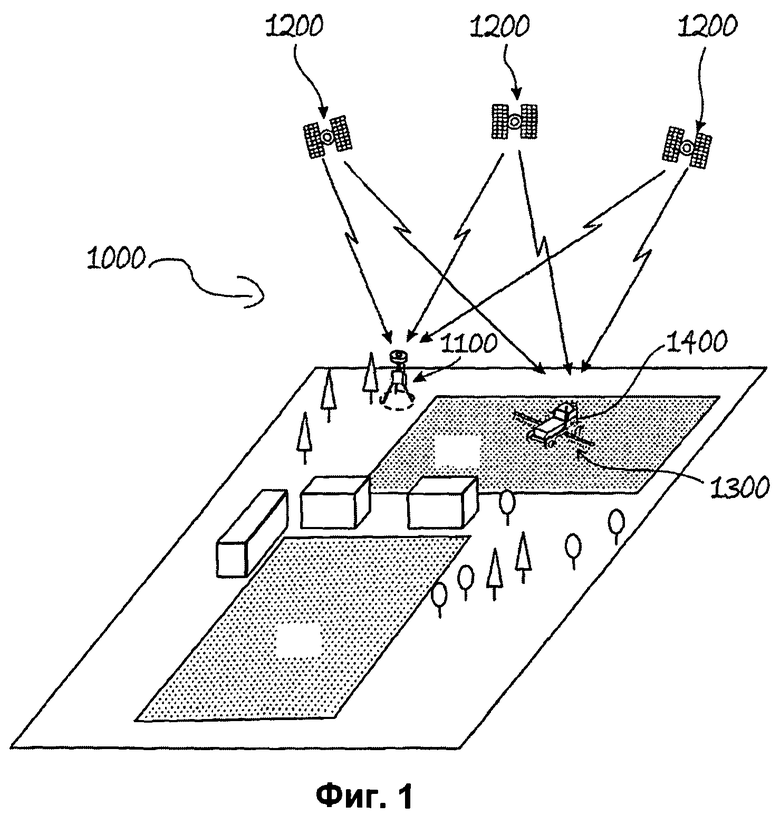
На Фиг.1 схематично изображена система определения координат местоположения в соответствии с примером осуществления изобретения.
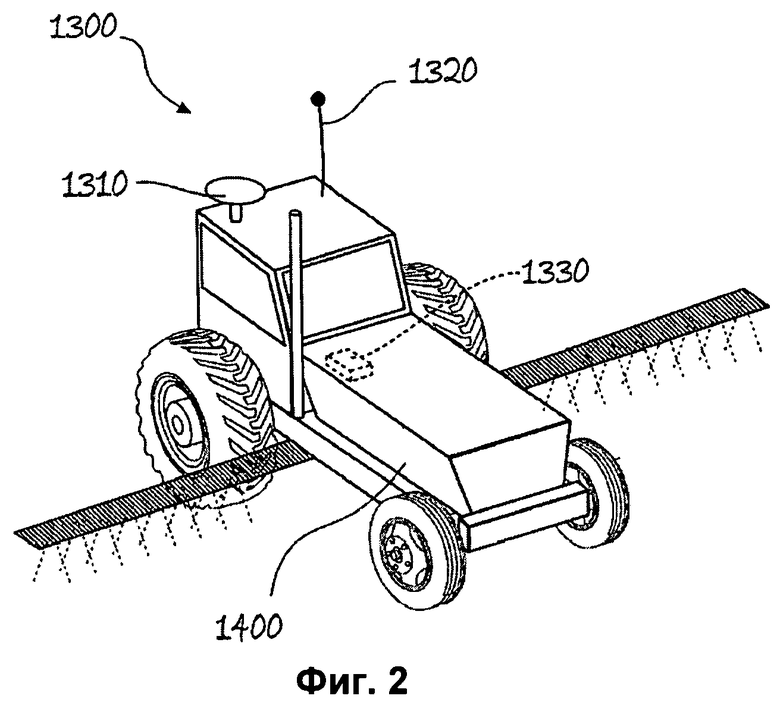
На Фиг.2 схематично изображено транспортное средство как часть системы определения координат местоположения, показанной на Фиг.1.
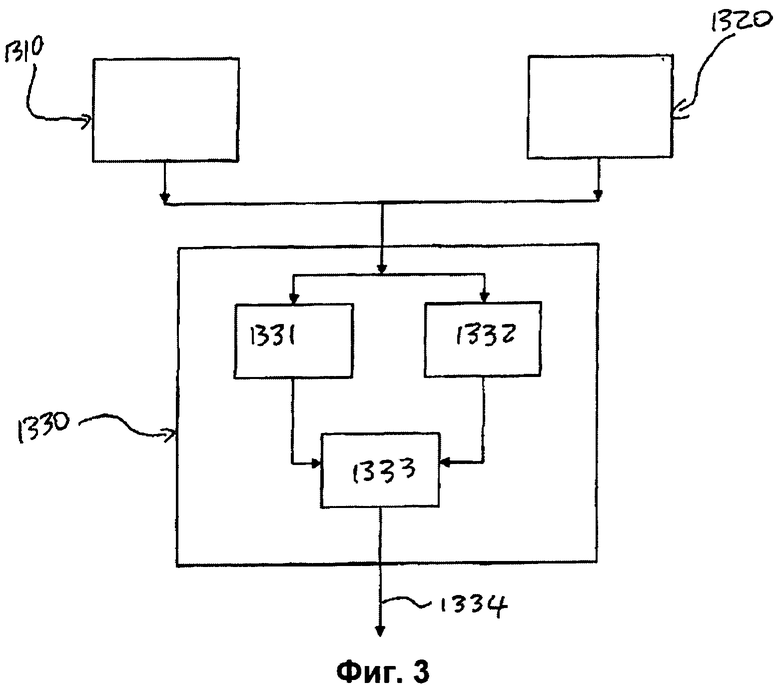
На Фиг.3 изображена блок-схема GPS-приемника как части системы определения координат местоположения, показанной на Фиг.1.
На Фиг.4 показана блок-схема алгоритма способа определения координат местоположения в соответствии с примером осуществления изобретения.
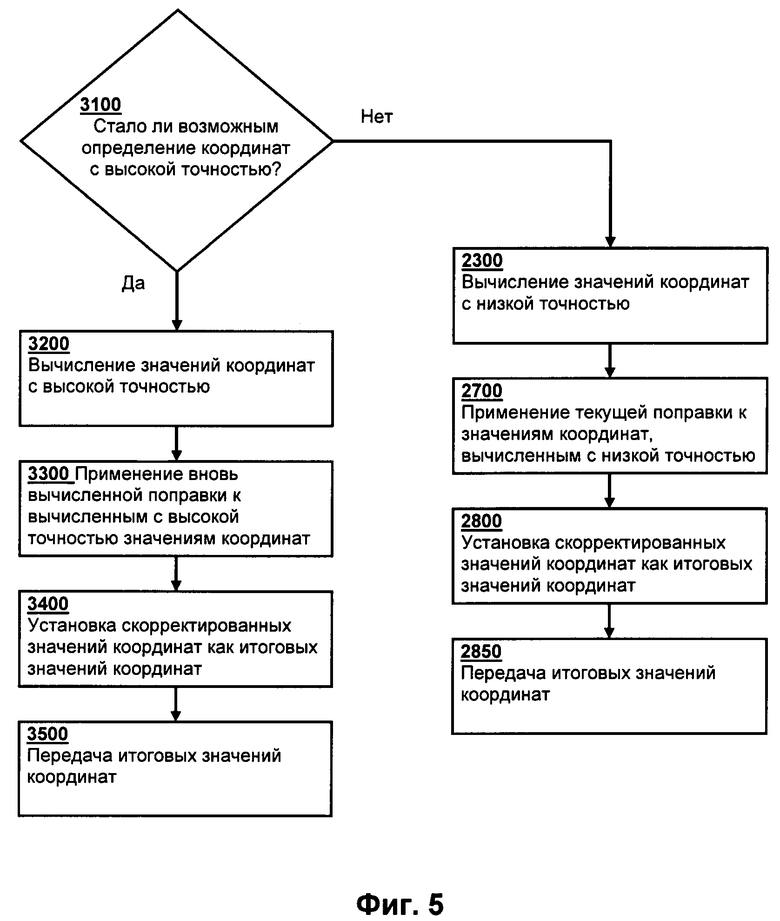
На Фиг.5 показана блок-схема алгоритма способа определения координат местоположения, составляющего часть алгоритма, показанного на Фиг.4, в котором вновь вычисленные значения координат местоположения с высокой точностью используют как итоговые значения координат местоположения.
На Фиг.6 показан пример осуществления способа и использования системы определения координат местоположения согласно изобретению.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение описывается применительно к GPS, используемой для управления сельскохозяйственной техникой. Однако специалистам в данной области техники очевидно, что такая система пригодна при использовании с любой известной ГНСС для управление перемещением любого транспортного средства.
На Фиг.1 схематично изображена согласно примеру осуществления изобретения система 1000 определения координат местоположения, в соответствии с которой для управления перемещением транспортного средства 1400 по заданному маршруту используют GPS, а на Фиг.2 схематично изображено транспортное средство 1400.
Система 1000 определения координат местоположения имеет ряд спутников 1200, образующих группировку спутников GPS, а транспортное средство 1400 оборудовано устройством 1300 определения координат местоположения, выполненным в виде GPS-антенны 1310, способной принимать зондирующие сигналы со спутников 1200, и GPS-приемника 1330, выполненного с возможностью приема таких зондирующих сигналов с GPS-антенны и вычисления на основе полученных данных значений координат местоположения. Зондирующий сигнал обычно может нести значения псевдодальности и фазы несущей частоты.
Дополнительно в примере осуществления изобретения базовая станция 1100 выполнена как часть системы 1000 определения координат местоположения. Базовая станция 1100 выполнена с возможностью приема зондирующих сигналов со спутников 1200, образующих группировку спутников GPS, и передачи корректирующих данных в режиме реального времени с использованием RTK-метода в виде значений измеренной фазы зондирующего сигнала на радиоантенну 1320 устройства 1300 определения координат местоположения.
На Фиг.3 изображена блок-схема GPS-приемника 1330 устройства 1300 определения координат местоположения. GPS-приемник 1330 имеет блок 1331 определения координат местоположения с высокой точностью, блок 1332 определения координат местоположения с низкой точностью и корректирующий блок 1333.
В предпочтительном примере осуществления изобретения блок 1331 определения координат местоположения с высокой точностью, блок 1332 определения координат местоположения с низкой точностью и корректирующий блок 1333 являются программными модулями вычислительного устройства GPS-приемника 1330. GPS-приемник 1330 может быть выполнен в виде любого известного GPS-приемника, который имеет собственное программное обеспечение, реализующее функции блока 1331 определения координат местоположения с высокой точностью, блока 1332 определения координат местоположения с низкой точностью и корректирующего блока 1333.
Блок 1331 определения координат местоположения с высокой точностью получает зондирующие сигналы с GPS-антенны 1310 и корректирующие данные с радиоантенны 1320. В примере осуществления изобретения в блоке 1331 определения координат местоположения с высокой точностью координаты местоположения транспортного средства 1400 вычисляются в режиме реального времени RTK-методом.
Блок 1332 определения координат местоположения с низкой точностью получает зондирующие сигналы с GPS-антенны 1310 и дополнительно корректирующие данные с радиоантенны 1320 или посредством GPS-антенны от так называемых уточняющих систем космического базирования (Space Based Augmentation Service - SBAS). В примере осуществления изобретения в блоке 1332 определения координат местоположения с низкой точностью значения координат местоположения транспортного средства 1400 вычисляются RPDP-методом.
Корректирующий блок 1333 связан с блоком 1331 определения координат местоположения с высокой точностью и блоком 1332 определения координат местоположения с низкой точностью, и в него поступают значения координат местоположения, вычисленные этими блоками. Корректирующий блок 1333 определяет итоговые значения координат местоположения 1334. Эти итоговые значения координат местоположения 1334 могут передаваться на автоматическую систему рулевого управления (не показана) для непосредственного управления перемещением транспортного средства 1400 по заданному маршруту. Альтернативно, итоговые значения координат местоположения 1334 могут отображаться на дисплее, для того чтобы водитель мог управлять транспортным средством 1400, двигаясь по заданному маршруту.
Работа корректирующего блока 1333 будет описана более детально со ссылкой на Фиг.4.
Несмотря на то что пример осуществления изобретения описан со ссылкой на блок 1331 определения координат местоположения с высокой точностью, осуществляющий вычисление значений координат местоположения в режиме реального времени RTK-методом, и со ссылкой на блок 1332 определения координат местоположения с низкой точностью, осуществляющий вычисление значений координат местоположения RPDP-методом, следует понимать, что эти конкретно указанные методы не ограничивают изобретение. Настоящее изобретение охватывает любые методы вычисления координат местоположения, посредством которых в блоке 1331 определения координат местоположения с высокой точностью реализуется метод вычисления координат местоположения с более высокой точностью, чем метод вычисления координат местоположения, реализуемый в блоке 1332 определения координат местоположения с низкой точностью.
Кроме того, изобретение охватывает методы определения координат местоположения с использованием ГНСС, в которых не требуются корректирующие данные с базовой станции 1100.
На Фиг.4 показана блок-схема алгоритма способа 2000 определения координат местоположения в соответствии с примером осуществления изобретения. Система 1000 определения координат местоположения и способ 2000 определения координат местоположения согласно изобретению решают описанную выше проблему скачкообразного изменения значений координат, когда определение координат местоположения с высокой точностью становится невозможным или недостоверным, что достигается посредством непрерывного сохранения поправки, в качестве которой используют разницу между значениями координат, вычисленными с высокой и низкой точностью, и применения поправки к вычисленным с низкой точностью значениям координат местоположения.
Корректирующий блок 1333 GPS-приемника 1330 хранит поправку, в качестве которой используют разницу между значениями координат, вычисленными блоком 1331 определения координат местоположения с высокой точностью и блоком 1332 определения координат местоположения с низкой точностью.
При включении GPS-приемника 1330 в корректирующем блоке 1333 устанавливается нулевое значение поправки (шаг 2100).
Затем в блоке 1331 определения координат местоположения с высокой точностью производится вычисление значений координат местоположения транспортного средства с высокой точностью (шаг 2200). Как уже было указано, в примере реализации изобретения это осуществляют в режиме реального времени с использованием RTK-метода.
Затем подобным образом в блоке 1332 определения координат местоположения с низкой точностью производится вычисление значений координат местоположения транспортного средства с низкой точностью (шаг 2300). Как уже было указано, в примере осуществления изобретения это реализуется с использованием RPDP-метода.
Затем корректирующий блок 1333 решает, является ли возможным или достоверным определение координат местоположения с высокой точностью (шаг 2400). В примере осуществления изобретения такое может произойти, например, когда блок 1331 определения координат местоположения с высокой точностью не может вычислить значения координат местоположения RTK-методом, и, следовательно, корректирующий блок 1333 не получает значений координат местоположения, вычисленных блоком 1331. В этом случае невозможно определить координаты местоположения с высокой точностью, и тогда реализуется следующий шаг 2700, который дополнительно описывается ниже.
В том случае когда определение координат местоположения с высокой точностью возможно, корректирующий блок 1333 получает значения координат, вычисленные с низкой точностью, и значения координат, вычисленные с высокой точностью, после чего обновляет поправку, вычисляя ее как разницу между указанными значениями координат (шаг 2500). Таким образом, применение поправки к значениям координат местоположения, определенным с низкой точностью, позволяет преобразовать эти значения координат в скорректированные значения координат местоположения, полученные с низкой точностью, которые идентичны значениям координат местоположения, полученным с высокой точностью в этот отдельно взятый момент времени.
Затем корректирующий блок 1333 устанавливает значения координат, вычисленные с высокой точностью, как итоговые значения координат местоположения 1334 (шаг 2600) и передает эти итоговые значение координат для использования, как это описывалось выше (шаг 2900).
Затем GPS-приемник 1330 передает вычисленные значения координат для следующего момента времени, как описывалось выше, начиная с шага 2200.
В том случае когда на шаге 2400 корректирующий блок 1333 решает, что определение координат местоположения с высокой точностью не представляется возможным, корректирующий блок 1333 применяет текущую поправку к значениям координат, вычисленным с низкой точностью, чтобы получить скорректированные значения координат местоположения (шаг 2700), которые устанавливают как итоговое значение координат местоположения 1334 (шаг 2800). Затем корректирующий блок 1333 передает эти итоговые значения координат местоположения (шаг 2850) для использования, как описывалось ранее.
Поскольку в качестве текущей поправки используют разницу между значениями координат, вычисленными с высокой точностью, и значениями координат, вычисленными с низкой точностью, полученную таким образом в последний момент времени (когда определение координат как с низкой, так и с высокой точностью было возможно), скорректированные значения координат в момент времени непосредственно после потери возможности определения координат местоположения с высокой точностью, или их недостоверности, не подвержены скачкообразному изменению, как это известно специалистам в данной области техники.
Таким образом, GPS-приемник 1330 может продолжать управлять перемещением транспортного средства по заданному маршруту, используя значения координат местоположения, вычисленные с низкой точностью, без резких скачкообразных изменений из-за непредвиденного изменения значений координат местоположения.
Поскольку значения координат, вычисленные с низкой точностью, имеют более высокое отклонение с точки зрения погрешности определения координат местоположения во времени, необходимо использовать координаты, определенные с высокой точностью, как итоговое значение координат местоположения 1334 с того момента, когда определение координат местоположения с высокой точностью снова становится возможным.
На Фиг.5 показана блок-схема алгоритма осуществления способа 3000 определения координат местоположения, в котором вновь вычисленные значения координат с высокой точностью используют как итоговые значения координат местоположения 1334.
Корректирующий блок 1333 непрерывно решает, возможно ли снова определение координат местоположения с высокой точностью (шаг 3100). В случае если это не представляется возможным, выполняются описанные выше шаги 2300, 2700, 2800 и 2850.
В случае если определение координат местоположения с высокой точностью снова стало возможным или достоверным, блок 1331 определения координат местоположения с высокой точностью вычисляет значения координат местоположения (шаг 3200), как описано ранее, и передает их в корректирующий блок 1333.
Затем корректирующий блок 1333 применяет вновь вычисленную поправку к вычисленным с высокой точностью значениям координат для определения скорректированных значений координат местоположения, вычисленных с высокой точностью (шаг 3300).
В качестве вновь вычисленной поправки используют разницу между итоговыми значениями координат в текущий момент времени и значениями координат, вычисленными с высокой точностью. Как описывалось, такую поправку затем применяют к вычисленным с высокой точностью значениям координат местоположения для определения скорректированных значений координат местоположения, вычисленных с высокой точностью.
Таким образом, не происходит скачкообразного изменения значений координат местоположения, когда GPS-приемник 1330 начинает вычислять значения координат местоположения, используя для этого значения координат, вычисленные с высокой точностью, которые в примере осуществления изобретения определяются RTK-методом.
Затем корректирующий блок 1333 устанавливает скорректированные значения координат местоположения, вычисленные с высокой точностью, как итоговые значения координат местоположения 1334 (шаг 3400) и затем передает такие итоговые значения координат местоположения для использования (шаг 3500), как это описывалось выше.
Важно, что вновь вычисленную поправку затем применяют ко всем дополнительно вычисленным значениям координат. Дополнительно, текущую поправку (т.е. когда в качестве поправки используют разницу между фактическими значениями координат, вычисленными с высокой точностью, и значениями координат, вычисленными с низкой точностью, в момент времени, непосредственно предшествующий тому моменту, когда определение координат местоположения с высокой точностью становится невозможным) применяют ко всем значениям координат местоположения, вычисленным с низкой точностью.
Хотя значения координат местоположения, вычисленные с низкой точностью, могут смещаться, в то время когда определение координат местоположения с высокой точностью не представляется возможным из-за их вычисления с низкой точностью, вновь вычисленные с высокой точностью значения координат местоположения будут минимизировать такое смещение и дополнительно обеспечивать уменьшение относительной погрешности.
При повторном получении значений координат, вычисленных с высокой точностью, корректирующий блок 1333 может установить такой маршрут, по которому транспортное средство постепенно будет выведено обратно к месту с координатами, определенными с высокой точностью. Такой режим является особенно полезным, когда разница между фактическими значениями координат, вычисленными с низкой точностью, и фактическими значениями координат, вычисленными с высокой точностью, ниже заданной поправки.
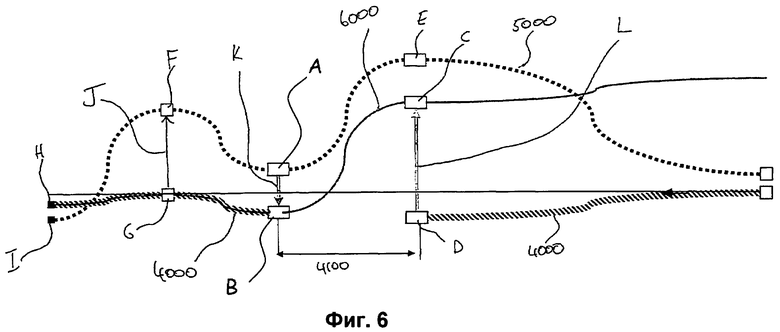
На Фиг.6 показан пример осуществления способа и применения системы определения координат местоположения согласно изобретению.
Линия 5000 соответствует значениям координат, вычисленным блоком 1332 определения координат местоположения с низкой точностью, которые в примере осуществления изобретения вычисляют RPDP-методом. Линия 4000 соответствует значениям координат, вычисленным блоком 1331 определения координат местоположения с высокой точностью, которые в примере осуществления изобретения вычисляют RTK-методом. Участок 4100 линии 4000 соответствует периоду времени, когда определение координат местоположения с высокой точностью было невозможным или недостоверным.
Линия 6000 соответствует итоговым значениям координат местоположения 1334, которое в примере осуществления изобретения является координатами местоположения, которые передаются на автоматическое рулевое управление и/или водителю транспортного средства 1400 для определения координат местоположения транспортного средства 1400.
Точка Н и точка I соответствуют начальному моменту работы GPS-приемника 1330.
Точка Н соответствует значениям координат, вычисленным с высокой точностью блоком 1331 определения координат местоположения с высокой точностью, и точка I соответствует значениям координат, вычисленных с низкой точностью блоком 1332 определения координат местоположения с низкой точностью.
В случае если определение координат местоположения с высокой точностью является возможным, управление транспортным средством 1400 в этот период времени осуществляют на основе таких вычисленных значений координат.
Точка G соответствует значениям координат местоположения, вычисленным с высокой точностью блоком 1331 определения координат местоположения с высокой точностью в последующий момент времени, и точка F соответствуют значениям координат местоположения, вычисленным с низкой точностью блоком 1332 определения координат местоположения с низкой точностью в тот же момент времени.
В случае если вычисление значений координат местоположения с высокой точностью является возможным, управление транспортным средством 1400 в этот период времени осуществляют на основе таких вычисленных значений координат.
Расстояние J соответствует текущей поправке, в качестве которой используют разницу между значениями координат, вычисленными с высокой точностью и с низкой точностью, при этом корректирующий модуль 1333 сохраняет такую поправку.
Аналогично, точка В соответствует значениям координат, вычисленным с высокой точностью блоком 1331 в последующий момент времени, и точка А соответствует значениям координат, вычисленным с низкой точностью блоком 1332 в тот же момент времени.
Расстояние К соответствует текущей поправке, в качестве которой используют разницу между значениями координат, вычисленными с высокой точностью, и значениями координат, вычисленными с низкой точностью, при этом корректирующий блок 1333 сохраняет такую поправку.
Непосредственно после вычисления значений координат точки В корректирующий блок 1333 решает, что определение координат местоположения с высокой точностью стало невозможным или недостоверным, после чего выполняет шаги 2700, 2800 и 2850. Поэтому текущую поправку К применяют к значениям координат, вычисленным с низкой точностью, для последующих за точкой А вычислений значений координат, получая таким образом скорректированные значения координат, вычисленные с низкой точностью, которые устанавливают как итоговые значения координат местоположения 1334 и используют для управления транспортным средством.
Как показано, итоговые значения координат местоположения 1334 от точки В к точке С отслеживают значения координат, вычисленные с низкой точностью, с поправкой К.
Кроме того, как можно видеть, полученные таким образом итоговые значения координат местоположения не изменяются скачкообразно, результатом чего является плавный переход значений координат местоположения при переходе от одного используемого метода вычисления к другому.
В точках С, D и Е корректирующий блок 1333 решает, что определение координат местоположения с высокой точностью стало снова возможным и достоверным, и, исходя из этого, выполняются шаги 3200, 3300, 3400 и 3500.
То есть вновь вычисленную поправку применяют к вычисленным с высокой точностью значениям координат в точке D, получая таким образом скорректированные значения координат, вычисленные с высокой точностью, и такие значения координат устанавливают как итоговые значения координат местоположения 1334, которые соответствуют точке С. Следовательно, итоговые значения координат местоположения 1334 отслеживают фактические значения координат местоположения, вычисленные с высокой точностью, с применением вновь вычисленной поправки L.
Применение способа и системы определения координат местоположения согласно настоящему изобретению обеспечивает более надежное управление транспортными средствами и им подобными объектами, что достигается за счет использования двух разных методов определения координат местоположения, так что плавный переход от одного метода определения координат местоположения к другому осуществляется без скачкообразного изменения значений координат.
Описание изобретения не ограничивает его каким-либо одним примером возможного осуществления или особым перечнем признаков. Специалистам в данной области техники могут быть понятны варианты отдельных примеров осуществления изобретения, которые, тем не менее, попадают в рамки формулы изобретения.
Изобретение относится к области радиотехники, а именно спутниковому позиционированию, и может быть использовано для определения координат местоположения в глобальной навигационной спутниковой системе. Технический результат заключается в обеспечении плавного перехода от одного метода определения координат местоположения к другому без скачкообразного изменения значений координат, что обеспечивает более надежное управление транспортными средствами и подобными объектами. Для этого вычисляют с низкой точностью значения координат местоположения и, если определение координат с высокой точностью невозможно, применяют поправку к вычисленным с низкой точностью значениям для определения итоговых значений координат, при этом в качестве поправки используют разницу между значениями координат, вычисленными с низкой точностью, и значениями координат, вычисленными с высокой точностью, в момент времени, когда определение значений координат местоположения с высокой точностью было в последний раз возможно, при этом непрерывно оценивают возможность определения координат местоположения с высокой точностью, и если это стало возможным, вычисляют значения координат местоположения с высокой точностью и применяют вновь вычисленную поправку к вычисленным с высокой точностью значениям координат для получения нового итогового значения координат местоположения. 3 н. и 12 з.п. ф-лы, 6 ил.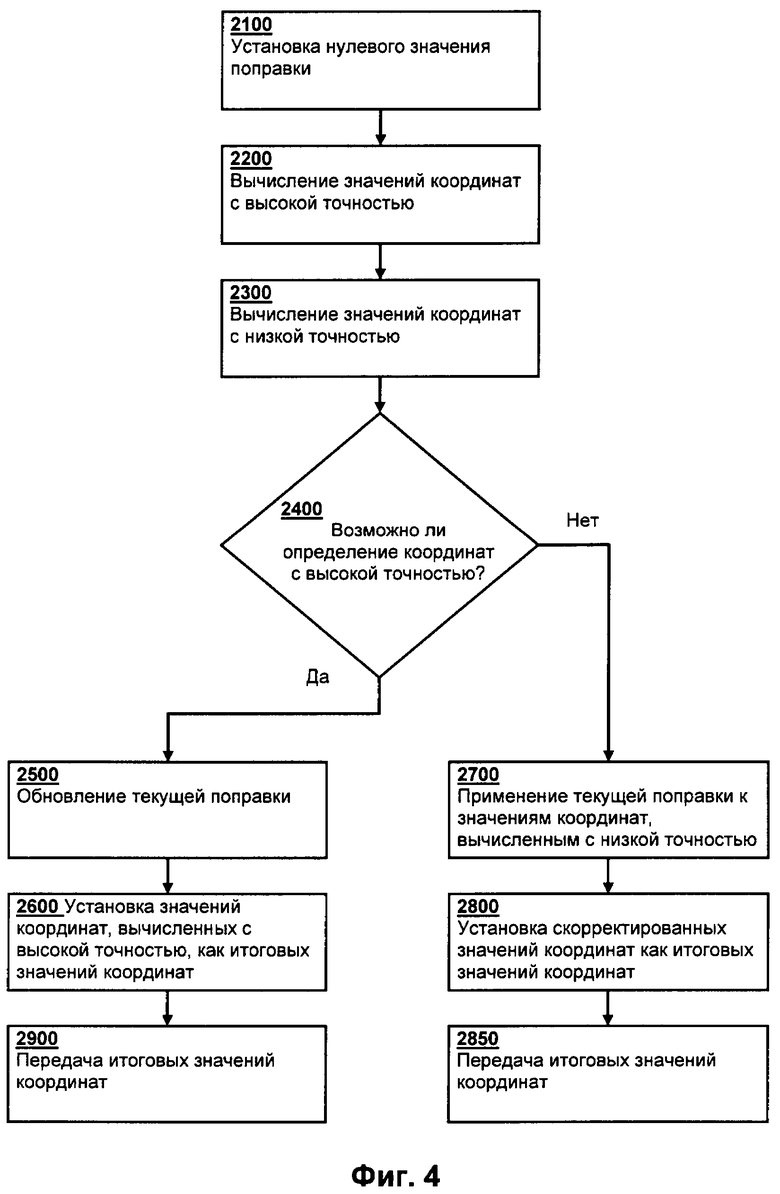
1. Способ определения координат местоположения, включающий этапы, на которых вычисляют значения координат местоположения с низкой точностью и, в случае если определение координат местоположения с высокой точностью невозможно, применяют поправку к вычисленным с низкой точностью значениям координат местоположения для определения итоговых значений координат местоположения, при этом в качестве поправки используют разницу между значениями координат местоположения, вычисленными с низкой точностью, и значениями координат местоположения, вычисленными с высокой точностью, в момент времени, когда определение значений координат местоположения с высокой точностью было в последний раз возможно, при этом непрерывно оценивают возможность определения координат местоположения с высокой точностью, и если это стало возможным, вычисляют значения координат местоположения с высокой точностью и применяют вновь вычисленную поправку к вычисленным с высокой точностью значениям координат местоположения для получения нового итогового значения координат местоположения.
2. Способ по п.1, отличающийся тем, что в качестве вновь вычисленной поправки используют разницу между итоговыми значениями координат местоположения и значениями координат местоположения, вычисленными с высокой точностью.
3. Способ по п.1, отличающийся тем, что новые итоговые значения координат местоположения передают для управления перемещением транспортного средства по заданному маршруту.
4. Способ по п.1, отличающийся тем, что итоговые значения координат местоположения передают для управления перемещением транспортного средства по заданному маршруту.
5. Способ по п.1, отличающийся тем, что вычисление значений координат местоположения с высокой точностью осуществляют в режиме реального времени с использованием фазовых измерений.
6. Способ по п.1, отличающийся тем, что вычисление значений координат местоположения с низкой точностью осуществляют с использованием фазового метода определения псевдодальности.
7. Способ по п.1, отличающийся тем, что поправку применяют к вычисленным с низкой точностью значениям координат местоположения для определения итоговых значений координат местоположения, если определение значений координат местоположения с высокой точностью является недостоверным.
8. Способ определения координат местоположения, включающий этапы, на которых вычисляют значения координат местоположения с высокой точностью, вычисляют значений координат местоположения с низкой точностью, обновляют поправку, при этом в качестве поправки используют разницу между значениями координат местоположения, вычисленными с низкой точностью, и значениями координат местоположения, вычисленными с высокой точностью, устанавливают, является ли достоверным определение координат местоположения с высокой точностью, и передают итоговые значения координат местоположения, при этом в случае, если упомянутое определение координат местоположения с высокой точностью установлено недостоверным, для получения итоговых значений координат местоположения применяют поправку к значениям координат местоположения, вычисленным с низкой точностью, а в случае, если упомянутое определение координат установлено недостоверным, но затем установлено достоверным, применяют вновь вычисленную поправку к вычисленным с высокой точностью значениям координат.
9. Способ по п.8, отличающийся тем, что в качестве вновь вычисленной поправки используют разницу между итоговыми значениями координат местоположения и значениями координат местоположения, вычислены с высокой точностью.
10. Способ по п.8, при котором вычисление значений координат местоположения с высокой точностью осуществляют в режиме реального времени с использованием фазовых измерений.
11. Способ но п.8, при котором вычисление значений координат местоположения с низкой точностью осуществляют с использованием фазового метода определения псевдодальности.
12. Система определения координат местоположения для транспортного средства, включающая блок определения координат местоположения с высокой точностью, выполненный с возможностью вычисления с высокой точностью значений координат местоположения транспортного средства, блок определения координат местоположения с низкой точностью, выполненный с возможностью вычисления с низкой точностью значений координат местоположения транспортного средства, и корректирующий блок, связанный с блоком определения координат местоположения с высокой точностью и с блоком определения координат местоположения с низкой точностью, при этом корректирующий блок выполнен с возможностью вычисления итоговых значений координат местоположения для управления транспортным средством но заданному маршруту, при этом корректирующий блок дополнительно выполнен с возможностью хранения поправки, соответствующей разнице между значениями координат местоположения, вычисленными с высокой точностью, и значениями координат местоположения, вычисленными с низкой точностью, в том случае, когда значения координат местоположения, определенные с высокой точностью, являются достоверными, а также выполнен с возможностью, в случае если упомянутое определение координат с высокой точностью установлено недостоверным, применения поправки к значениям координат местоположения, вычисленным с низкой точностью для получения итоговых значения координат местоположения, а в случае, если упомянутое определение координат с высокой точностью установлено недостоверным, но затем установлено достоверным, применения вновь вычисленной поправки к вычисленным с высокой точностью значениям координат.
13. Система по п.12, отличающаяся тем, что вновь вычисленная поправка представляет собой разницу между итоговыми значениями координат местоположения и значениями координат местоположения, вычислены с высокой точностью.
14. Система по п.12, отличающаяся тем, что значения координат местоположения с высокой точностью вычислены в режиме реального времени с использованием фазовых измерений.
15. Система по п.12, отличающаяся тем, что значения координат местоположения с низкой точностью вычислены с использованием фазового метода определения псевдодальности.
| US 6957143 B1, 18.10.2005 | |||
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ ОКОНЕЧНОГО УСТРОЙСТВА БЕСПРОВОДНОЙ СВЯЗИ В СМЕШАННОЙ СИСТЕМЕ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2003 |
|
RU2327303C2 |
| US 5923287 A, 13.07.1999 | |||
| US 2008088506 А1, 17.04.2008 | |||
| US 2003187560 А1, 02.10.2003 | |||
| US 6018704 А, 25.01.2000. | |||

