Изобретение относится к области автоматизированных рабочих мест операторов мобильных пунктов управления автоматизированных систем управления подвижными объектами и может быть использовано как автоматизированный тренажерный комплекс для подготовки операторов автоматизированных береговых постов управления (АБПУ) безэкипажными катерами (БЭК). Изобретение может также относиться к области разработки автоматизированных рабочих мест (АРМ), предназначенных для управления мобильными роботами.
Известно автоматизированное рабочее место оператора автоматизированной системы управления (Патент РФ № 2133497C1, МПК G06F 15/00, опуб. 20.07.1999). Изобретение относится к области автоматизированных рабочих мест (АРМ) операторов мобильных пунктов управления автоматизированных систем управления подвижными объектами. Технический результат заключается в обеспечении оператору одновременного и с высоким качеством отображения большого объема информации, которым он должен пользоваться в процессе работы, и в повышении надежности работы системы. Этот технический результат достигается тем, что в системный блок дополнительно установлены клавиатуры, антенна и навигационный приемник системы спутниковой навигации, радиостанция и не менее одного дополнительного жидкокристаллического дисплея.
Недостатком данного изобретения является то, что описываемый АРМ изначально не предназначен для оснащения АБПУ реконфигурируемого БЭК со сменной модульной полезной нагрузкой, не имеет источника бесперебойного питания. Данное изобретение принимаем в качестве аналога.
Известен автоматизированный тренажерный комплекс для подготовки экипажей кораблей (Патент РФ № 2234138, МПК G09B 9/06, опуб. 10.08.2004). Изобретение относится к учебно-техническим средствам и может быть использовано для формирования навыков, умения и способностей, необходимых в реальных условиях деятельности операторов на кораблях. Комплекс содержит комплект учебно-действующего образца автоматизированного рабочего места, установленного на качающейся платформе, комплект автоматизированных рабочих мест операторов, пост руководства обучением, вычислительно-модульный комплекс и систему обмена данными, при этом все элементы комплекса соединены между собой через локальную сеть.
Недостатком данного изобретения является то, что его конструкция и замысел предназначены для обучения экипажей традиционных обитаемых кораблей, и не способно обеспечить обучение операторов управления кораблей без экипажа, т. е. БЭК. Традиционный надводный корабль не имеет сменной модульной полезной нагрузки (вся полезная нагрузка стационарна и ее состав не меняется), следовательно, данное изобретение не способно обеспечить обучение операторов БЭК со сменной модульной полезной нагрузкой, что актуально для современного развития тренажерной техники. Недостатком изобретения является также то, что тренажер выполнен в стационарном варианте, расположен в помещении и не приспособлен для транспортировки в разобранном состоянии и не имеет источника бесперебойного питания. Данное изобретение принимаем в качестве прототипа.
В основу нового технического решения поставлена задача создания быстро разбираемого и собираемого, мобильного автоматизированного берегового поста управления БЭК, который может оснащаться комплектом сменных модулей полезных нагрузок (по очереди) в зависимости от решаемых учебных задач, например: модуль посадочной площадки с квадрокоптером; модуль спускоподъемного устройства (СПУ) с телеуправляемым необитаемым подводным аппаратом (ТНПА); модуль СПУ с автономным необитаемым подводным аппаратом (АНПА) и др. Дополнительно, конструкция АБПУ БЭК должна быть эргономически рациональной для решения учебных и тренировочных задач при обучении персонала навыкам управления БЭК и его сменными полезными нагрузками, а также быть простой в исполнении и надежной в работе.
Техническим результатом изобретения является повышение надежности АБПУ БЭК за счет установки источника бесперебойного питания.
Указанный технический результат достигается тем, что разработан автоматизированный береговой пост управления безэкипажным катером, содержащий автоматизированные рабочие места операторов, включающие комплект учебно-действующих образцов-имитаторов, блок ввода программы обучения и отображения информации, вычислительно-моделирующей комплекс, состоящий из персональных вычислительных машин, система обмена данными, программное обеспечение системы обмена данными комплекса автоматизированных средств.
Принципиальным отличием от прототипа является то, что автоматизированный береговой пост управления безэкипажным катером включает автоматизированное рабочее место оператора безэкипажного катера, навигатора безэкипажного катера и операторов полезных нагрузок. При этом автоматизированный береговой пост управления безэкипажным катером оснащен микрофоном руководителя, левой и правой звуковыми колонками, автономным метеопостом, аппаратурой и антенной радиомодема, аппаратурой и антенной Wi-Fi дальнего радиуса действия, а так же левым и правым выдвижными столиками. Кроме того, в автоматизированном береговом посту управления безэкипажным катером дополнительно установлен источник бесперебойного питания.
Отличительный признак источник бесперебойного питания позволяет в случае отключения электропитания завершить учебное занятие и безопасно отключить аппаратуру автоматизированного берегового поста управления безэкипажным катером.
Сущность изобретения поясняется чертежами:
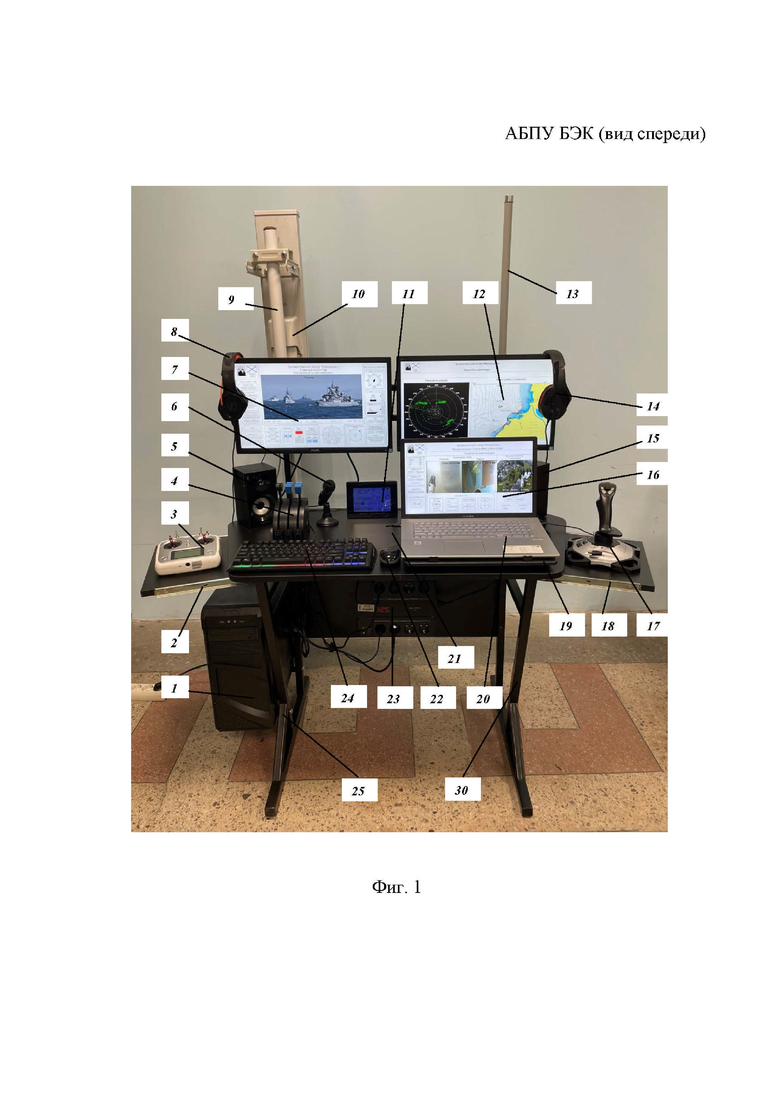
- на фиг. 1 показано схематическое изображение АБПУ БЭК (вид спереди);
- на фиг. 2 показано схематическое изображение АБПУ БЭК (вид сзади);
- на фиг. 3 показана схема электрических соединений АБПУ БЭК.
На чертежах обозначены:
1 - системный блок главного компьютера;
2 - левый выдвижной столик;
3 - пульт управления квадрокоптером;
4 - сектор управления движением БЭК;
5 - левая звуковая колонка;
6 - микрофон руководителя;
7 - главный монитор оператора БЭК;
8 - гарнитура оператора БЭК;
9 - стойка для крепления антенны Wi-Fi;
10 - аппаратура и антенна Wi-Fi;
11 - автономный метеопост;
12 - монитор навигатора БЭК;
13 - аппаратура и антенна радиомодема;
14 - гарнитура навигатора БЭК;
15 - правая звуковая колонка;
16 - монитор полезных нагрузок;
17 - джойстик управления ТНПА;
18 - правый выдвижной столик;
19 - кулер ноутбука;
20 - ноутбук;
21 - платформа;
22 - «мышка» главного компьютера;
23 - источник бесперебойного питания;
24 - клавиатура главного компьютера;
25 - левая стойка платформы;
26 - стойка для крепления антенны радиомодема;
27 - стойка крепления мониторов;
28 - задняя панель;
29 - инжектор РоЕ;
30 - правая стойка платформы.
Автоматизированный береговой пост управления безэкипажным катером (см. фиг. 1 - 3) включает несущую конструкцию, состоящую из платформы 21, расположенную на стойках платформы левой 25 и правой 30. Для увеличения рабочей поверхности с тыльной стороны платформы 21 слева и справа установлены выдвижные (на салазках) столики левый 2 и правый 18. К платформе 21 крепится стойка крепления мониторов 27, к которой крепятся главный монитор оператора БЭК 7 и монитор навигатора БЭК 12, а также стойка для крепления антенны Wi-Fi 9 с аппаратурой и антенной Wi-Fi 10 и стойка для крепления антенны радиомодема 26 с аппаратурой и антенной радиомодема 13. К левой стойке платформы 25 крепится системный блок 1. На плоской рабочей поверхности платформы 21, в левой его части, расположен сектор управления движением БЭК 4, клавиатура главного компьютера 24, автономный метеопост 11, левая звуковая колонка 5, «мышка» главного компьютера 22 и микрофон руководителя 6 . На платформе 21, в правой его части, расположен монитор полезных нагрузок 16 ноутбука 20 оператора полезных нагрузок БЭК со своим кулером 19, правая звуковая колонка 15. На левом выдвижном столике 2 расположен пульт управления квадрокоптером 3, на правом выдвижном столике 18 расположен джойстик управления ТНПА 17. На экране главного монитора оператора БЭК 7 отражаются показания главной телекамеры БЭК и «иконки» команд, подаваемых на БЭК по радиоканалу. На экране монитора навигатора БЭК 12 отражаются показания радара БЭК и электронная карта района плавания катера, где отражаются координаты БЭК, координаты квадрокоптера и его высота полета, а также координаты ТНПА. На экране монитора полезных нагрузок 16 отражаются показания телекамер ТНПА и телекамеры квадрокоптера. При помощи монитора полезных нагрузок и его программного обеспечения можно управлять одновременно двумя разнообразными полезными нагрузками: квадрокоптером и ТНПА; квадрокоптером и автономным необитаемым подводным аппаратом (АНПА); квадрокоптером и буксируемым необитаемым подводным аппаратом (БНПА); модулем имитатора стрелкового оружия и ТНПА; модулем имитатора стрелкового оружия и АНПА; модулем имитатора стрелкового оружия и БНПА. При помощи гарнитуры оператора БЭК 8 и гарнитуры навигатора БЭК 14, а также микрофона руководителя 6 и звуковых колонок левой 5 и правой 15 операторы и руководитель занятия могут вербально общаться с плавсредствами и судами, находящимися далеко в море. Схема электрических соединений АБПУ БЭК показана на фиг. 3.
Поставленная задача решается тем, что с целью возможной транспортировки на дальние расстояния различными видами транспорта, конструкция АБПУ предусматривает его быструю и полную разборку на составные части. В собранном виде АБПУ БЭК представляет собой единое, компактное изделие (см. фиг. 1 и 2), оптимальное для решения задач обучения одновременно четырех операторов: оператора БЭК; навигатора БЭК; операторов квадрокоптером и ТНПА; квадрокоптером и АНПА; квадрокоптером и БНПА; модулем имитатора стрелкового оружия и ТНПА; модулем имитатора стрелкового оружия и АНПА; модулем имитатора стрелкового оружия и БНПА.
Автоматизированный береговой пост управления безэкипажным катером работает следующим образом:
С подачей питания от электрической сети или переносного генератора на источник бесперебойного питания 23 включается системный блок главного компьютера 1, главный монитор оператора БЭК 7, монитор навигатора БЭК 12, ноутбук 20 с монитором полезных нагрузок 16, звуковые колонки левая 5 и правая 15, инжектор РоЕ 29, после включения системного блока главного компьютера 1 загружается программное обеспечение главного монитора оператора БЭК 7 и монитора навигатора БЭК 12, а так же подается питание и включается в работу сектор управления движением БЭК 4, микрофон руководителя 6, гарнитура оператора БЭК 8 и гарнитура навигатора БЭК 14, аппаратура и антенна радиомодема 13, кулер ноутбука 19, «мышка» главного компьютера 22, клавиатура главного компьютера 24. С подачей питания на ноутбук 20 загружается программное обеспечение монитора полезных нагрузок 16 и включается в работу джойстик управления ТНПА 17. С подачей питания на инжектор РоЕ 29 включается в работу аппаратура и антенна Wi-Fi 10. На столе размещен автономный метеопост 11. Для удобства использования АБПУ БЭК созданы два выдвижных столика левый 2 и правый 18 для размещения пульта управления квадрокоптером 3 и джойстик управления ТНПА 17. АБПУ БЭК оснащено стойкой для крепления антенны радиомодема 26 и стойкой для крепления антенны Wi-Fi 9 дальнего радиуса действия.
Таким образом, создан быстро разбираемый и собираемый, мобильный автоматизированный береговой пост управления БЭК, который может оснащаться комплектом сменных модулей полезных нагрузок (по очереди) в зависимости от решаемых учебных задач, а также быть простым в исполнении и надежным в работе.
Техническим результатом изобретения является повышение надежности АБПУ БЭК за счет установки источника бесперебойного питания.
Заявляемое изобретение промышленно применимо, так как при изготовлении автоматизированного берегового поста управления безэкипажным катером могут быть использованы широко распространенные устройства и компоненты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обучения операторов по управлению безэкипажным катером | 2023 |
|
RU2809866C1 |
| Способ лазерной имитации стрельбы при обучении стрельбе | 2024 |
|
RU2839564C1 |
| Пост наблюдения на базе привязного беспилотного летательного аппарата | 2023 |
|
RU2807768C1 |
| БЕЗЭКИПАЖНЫЙ КАТЕР, ОСНАЩЕННЫЙ УСТРОЙСТВОМ ДЛЯ ПОДЗАРЯДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2831111C1 |
| Способ освещения подводной обстановки и нейтрализации обнаруженных объектов | 2022 |
|
RU2789185C1 |
| Спускоподъемное устройство для малогабаритных необитаемых подводных аппаратов и опускаемых гидроакустических антенн с судна-носителя | 2021 |
|
RU2760798C1 |
| СПОСОБ НАТУРНЫХ ИСПЫТАНИЙ БЕЗЭКИПАЖНЫХ СУДОВ | 2021 |
|
RU2775813C1 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| НАВИГАЦИОННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС | 2024 |
|
RU2828932C1 |
| Безэкипажный катер - носитель сменной полезной нагрузки | 2021 |
|
RU2760797C1 |


Изобретение относится к области автоматизированных рабочих мест операторов мобильных пунктов управления автоматизированных систем управления подвижными объектами и может быть использовано как автоматизированный тренажерный комплекс для подготовки операторов автоматизированных береговых постов управления (АБПУ) безэкипажными катерами (БЭК). Изобретение может также относиться к области разработки автоматизированных рабочих мест, предназначенных для управления мобильными роботами. АБПУ БЭК включает автоматизированное рабочее место оператора безэкипажного катера, навигатора безэкипажного катера и оператора полезных нагрузок. АБПУ БЭК оснащен микрофоном руководителя, левой и правой звуковыми колонками, автономным метеопостом, аппаратурой и антенной радиомодема, аппаратурой и антенной Wi-Fi дальнего радиуса действия, левым и правым выдвижными столиками. В АБПУ БЭК установлен источник бесперебойного питания. Техническим результатом является повышение надежности АБПУ БЭК за счет установки источника бесперебойного питания. 3 ил.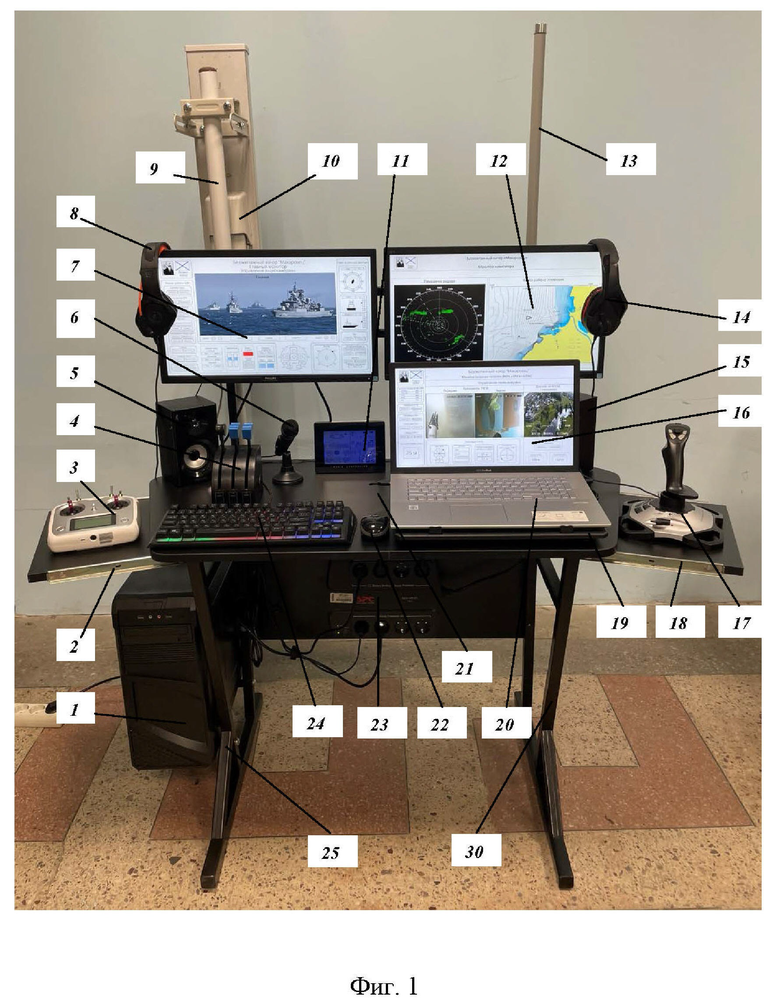
Автоматизированный береговой пост управления безэкипажным катером, содержащий автоматизированные рабочие места операторов, включающие комплект учебно-действующих образцов-имитаторов, блок ввода программы обучения и отображения информации, вычислительно-моделирующий комплекс, состоящий из персональных вычислительных машин, систему обмена данными, программное обеспечение системы обмена данными комплекса автоматизированных средств, отличающийcя тем, что автоматизированный береговой пост управления безэкипажным катером также включает автоматизированное рабочее место оператора безэкипажного катера, навигатора безэкипажного катера, операторов полезных нагрузок, при этом автоматизированный береговой пост управления безэкипажным катером оснащен микрофоном руководителя, левой и правой звуковыми колонками, автономным метеопостом, аппаратурой и антенной радиомодема, аппаратурой и антенной Wi-Fi дальнего радиуса действия, а так же левым и правым выдвижными столиками; кроме того, в автоматизированный береговой пост управления безэкипажным катером дополнительно установлен источник бесперебойного питания.
| АВТОМАТИЗИРОВАННЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОРАБЛЕЙ | 2003 |
|
RU2234138C1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ | 1998 |
|
RU2133497C1 |
| СМОТРОВОЕ СТЕКЛО ПЕРЕД ВАГОНОВОЖАТЫМ | 1929 |
|
SU16241A1 |
| Учебно-тренировочный комплекс связи надводного корабля | 2021 |
|
RU2783021C1 |
| Учебно-тренировочный комплекс подготовки операторов береговых комплексов | 2020 |
|
RU2760601C1 |

