Область техники, к которой относится изобретение
Изобретение относится к области навигации летательных аппаратов (ЛА), предназначено для обеспечения безопасности полетов ЛА путем использования системы автоматического зависимого наблюдения (АЗН) на борту ЛА.
Технический результат заключается в повышении достоверности данных АЗН.
Уровень техники
Известен способ защиты АЗН от помех [1], в котором выполняется сравнение вычисленной дальности источника сигнала, полученной с использованием пространственных координат ЛА и координат источника, с дальностью, полученной путем измерения задержки распространения сигнала. Этот способ не требует усложнения приемного устройства и может быть использован на борту ЛА.
Недостатком данного способа является недостаточная точность контроля достоверности АЗН из-за низкой помехоустойчивости по отношению к ложным сигналам АЗН. С помощью вычислительного оборудования при наличии координат ЛА и источника помех возможно создать ложную отметку с соответствующей задержкой сигнала. Такой сигнал помехи невозможно отличить от реального сигнала на борту ЛА с помощью данного способа.
Известны способы защиты АЗН с использованием направленных антенн или антенных решеток [2-5]. Защита от помех осуществляется сравнением измеренной угловой координаты источника сигнала, принятого с помощью направленной антенны, с вычисленной угловой координатой на основе использования пространственных координат ЛА и источника сигнала. Такие способы нуждаются в многоэлементной фазированной антенной решетке и многоканальном приемнике на борту ЛА и предполагают использование фазовой информации. Последнее требование чрезвычайно усложняет реализацию приемника, т.к. в системе АЗН сигналы имеют большой динамический диапазон порядка 80 дБ. В стандартных приемниках проблема большого динамического диапазона решается путем применения логарифмического усилителя промежуточной частоты, реализуемого на одной микросхеме. При фазовой обработке требуется многоканальный приемник с линейной обработкой и сложной системой автоматической регулировки усиления. Другим недостатком этого способа защиты при использовании на ЛА являются большие размеры антенной системы.
Наиболее близким по технической сущности к заявляемому способу является «Способ контроля достоверности данных системы автоматического зависимого наблюдения» [6], заключающийся в том, что проводят прием сигналов спутниковой навигационной системы (СНС) и определение координат и вектора скорости летательного аппарата (ЛА), прием сигналов АЗН и определение координат ЛА, вычисление дальностей ЛА по определенным координатам, формирование временной шкалы и измерение дальностей ЛА по времени задержки сигналов АЗН, сравнение разности упомянутых вычисленных и измеренных дальностей с заданным порогом, в случае превышения упомянутой разностью заданного порога проводят формирование сигнала недостоверности данных АЗН и отображение сигнала недостоверности на индикаторе воздушной обстановки.
Недостатком прототипа является низкая достоверность принимаемых от АЗН данных.
Наиболее близким из числа известных технических решений в отношении способа для осуществления способа является устройство реализации технологии автоматического зависимого наблюдения и вещания (АЗН-В) [7], содержащее приемник сигналов СНС, инерциальную навигационную систему, приемопередатчик сигналов АЗН-В, наземную станцию, принимающую сигналы от АЗН-В, устройство обработки данных наблюдения и систему индикации воздушной обстановки.
Недостатком данного устройства является низкая достоверность информации наблюдения.
Раскрытие сущности изобретения
Задачей изобретения является создание способа и устройства, позволяющих проводить контроль достоверности данных от АЗН без использования вторичного обзорного радиолокатора.
Данная задача решается в способе тем, что проводят прием сигналов СНС и определяют координаты и вектор скорости летательного аппарата (ЛА), принимают сигналы АЗН и определяют координаты ЛА, вычисляют дальности ЛА по определенным координатам, формируют временную шкалу и измеряют дальности ЛА по времени задержки сигналов АЗН, сравнивают разности упомянутых вычисленных и измеренных дальностей с заданным порогом, формируют сигнала о достоверности данных АЗН и отображают его на индикаторе воздушной обстановки, причем вначале задают координаты точек, в которых производится прием сигналов от АЗН, после определения координат ЛА вычисляют среднюю геометрическую высоту ЛА и дальности от точек приема до ЛА в горизонтальной плоскости, после приема сигнала АЗН определяют наличие в нем метки времени передачи сигнала, в случае отсутствия метки времени, измеряют времена приема сигнала как минимум в двух точках приема, вычисляют разницу времен приема сигнала, по разнице времен приема сигнала и координатам точек приема вычисляют гиперболу вероятного местоположения ЛА, по гиперболе вероятного местоположения ЛА и заданной погрешности определения местоположения ЛА вычисляют границы строба, проходящие от гиперболы вероятного местоположения ЛА на расстоянии заданной погрешности и перед формированием сигнала о достоверности данных от АЗН проверяют нахождение ЛА в пределах строба.
Технический результат достигается за счет введения новых существенных отличий (в способе), заключающихся в задании координат точек, в которых производится прием сигналов от АЗН, после определения координат ЛА вычисляют среднюю геометрическую высоту ЛА и дальности от точек приема до ЛА в горизонтальной плоскости, после приема сигнала АЗН определяют наличие в нем метки времени передачи сигнала, в случае отсутствия метки времени, измеряют времена приема сигнала как минимум в двух точках приема, вычисляют разницу времен приема сигнала, по разнице времен приема сигнала и координатам точек приема вычисляют гиперболу вероятного местоположения ЛА, по гиперболе вероятного местоположения ЛА и заданной погрешности определения местоположения ЛА вычисляют границы строба, проходящие от гиперболы вероятного местоположения ЛА на расстоянии заданной погрешности, перед формированием сигнала о достоверности данных от АЗН проверяют нахождение ЛА в пределах строба, за счет чего определяется несоответствие между передаваемыми координатами ЛА и их возможными значениями, вычисленными на основе времени передачи сигнала, что позволяет повысить достоверность информации наблюдения.
Устройство для осуществления способа согласно изобретению содержит последовательно соединенные приемник сигналов СНС, вычислительный модуль, приемопередатчик сигналов АЗН, наземную станцию, принимающую сигналы от транспондера АЗН, устройство обработки данных наблюдения и систему индикации воздушной обстановки, а также инерциальную навигационную систему, выход которой соединен со вторым входом вычислительного модуля. Предлагаемое устройство дополнительно содержит дополнительную наземную станцию, принимающую сигналы от транспондера АЗН, устройство контроля достоверности данных наблюдения и базу метеорологических данных, причем выход дополнительной наземной станции соединен с первым входом устройства контроля достоверности данных наблюдения, выход устройства контроля достоверности данных наблюдения соединен со вторым входом устройства обработки данных наблюдения, второй вход устройства соединен с базой метеорологических данных, третий вход устройства соединен со вторым выходом наземной станции.
Осуществление изобретения
Предлагаемый способ осуществляют следующим образом:
1. задают критерий оценки достоверности системы АЗН, содержащий два параметра: n - число сообщений; m - число недостоверных сообщений из n последних сообщений, при котором систему АЗН считают недостоверной;
2. задают координаты точек, в которых производится прием сигналов от АЗН, например, географические или прямоугольные координаты двух станций приема сигналов АЗН, удаленных на некотором расстоянии друг от друга;
3. проводят прием сигналов СНС и определяют координаты и вектор скорости ЛА, например, используя бортовую вычислительную систему ЛА. После чего передают сигнал потребителям с борта ЛА, например, используя транспондер АЗН;
4. принимают сигналы АЗН, например, станциями приема сигналов АЗН;
5. вычисляют геометрическую высоту ЛА относительно точек приема сигналов от АЗН, например, станций приема сигналов АЗН;
6. по определенным (в п. 2) координатам ЛА вычисляют дальности ЛА от точек приема сигналов АЗН;
7. учитывая геометрические высоты ЛА и дальности ЛА от точек приема сигналов АЗН, вычисляют дальности от точек приема сигналов АЗН до ЛА в горизонтальной плоскости;
8. формируют временную шкалу и измеряют дальности ЛА по времени задержки сигналов АЗН;
9. определяют наличие в сигнале АЗН метки времени передачи сигнала;
9.1. при наличии метки времени в сигнале сравнивают разности упомянутых вычисленных и измеренных дальностей ЛА от точек приема сигналов с заданным порогом;
9.2. если все разности меньше заданного порога, то данные от АЗН считают достоверными, в противном случае недостоверными;
10. при отсутствии метки времени в сигнале:
10.1. измеряют времена приема сигнала как минимум в двух точках приема;
10.2. вычисляют разницу времен приема сигнала;
10.3. по разнице времен приема сигнала и координатам точек приема вычисляют гиперболу вероятного местоположения ЛА. Гиперболу вероятного местоположения ЛА можно определить, например, используя следующее уравнение
(x-x1)2+(у-y1)2=(x-x2)2+(y-y2)2
где х, у - допустимые координаты ЛА, из множества которых формируется область вероятного местоположения ЛА, xi, yi - координаты i-й точки приема сигнала;
10.4. по гиперболе вероятного местоположения ЛА и заданной погрешности определения местоположения ЛА 9 вычисляют границы строба, проходящие от гиперболы вероятного местоположения ЛА на расстоянии заданной погрешности;
10.5. перед формированием сигнала о достоверности данных от АЗН проверяют нахождение ЛА в пределах строба, например, используя следующее уравнение

11. формируют сигнал о достоверности данных АЗН и отображают его на индикаторе воздушной обстановки;
12. проверяют выполнение условия достоверности системы АЗН, заключающееся в том, выполняется заданный критерия по соотношению числа достоверных и недостоверных сообщений за заданный интервал времени. В случае если из п сообщений m недостоверны, систему АЗН считают недостоверной.
Возможен вариант осуществления способа, в котором при наличии метки времени передачи сигнала перед формированием сигнала о достоверности данных АЗН после осуществления п. 8:
1. находят разность моментов времени передачи двух последовательно излучаемых одним ЛА сигналов
Δtист=t2-t1
где t1 и t2 - моменты времени излучения двух последовательно идущих сигналов АЗН, соответственно.
2. отдельно для каждой точки приема сигналов находят разность моментов времени принятия этих сигналов
где t'1 и t'2 - моменты времени приема двух последовательно идущих сигналов АЗН, соответственно.
3. с учетом разностей моментов времен передачи Δtистi и принятия Δtнаблi сигналов в точках приема определяют радиальную скорость движения ЛА [8]
где с - скорость света.
Если νист>0, значит объект приближается к заданной точке приема сигналов, если же νист<0, значит объект удаляется от нее.
Для практического использования этого соотношения с его помощью производят ряд последовательных измерений скорости νист по которым с использованием известных в теории вероятности и математической статистике методов рассчитывают доверительный интервал оценки скорости, и если полученное в сообщении АЗН значение скорости попадает в пределы этого доверительного интервала, то полученные данные считают достоверными. Для увеличения точности оценки скорости объекта используют сообщения АЗН, поступающие с временным интервалом 10 секунд или более.
4. проверяют нахождение переданного в сигнале значения радиальной скорости ЛА в пределах определенного диапазона
5. в случае нахождения радиальной скорости вне пределов определенного диапазона, данные от АЗН считают не достоверными и увеличивают счетчик количества недостоверных сообщений на единицу.
6. проверяют выполнение условия достоверности системы АЗН, заключающееся в том, выполняется заданный критерия по соотношению числа достоверных и недостоверных сообщений за заданный интервал времени. В случае если из n сообщений m недостоверны, систему АЗН считают недостоверной.
В упрощенном варианте реализации способа данные от АЗН считаются недостоверными, если оценка факта приближения/удаления ЛА на основе передаваемых данных не соответствует вычисленной с использованием моментов времен излучения и приема сигналов.
Возможен вариант осуществления способа, в котором перед формированием сигнала о достоверности данных АЗН вместо радиальной скорости ЛА определяют путевую скорость и ее учетом формируют сигнал о достоверности данных АЗН.
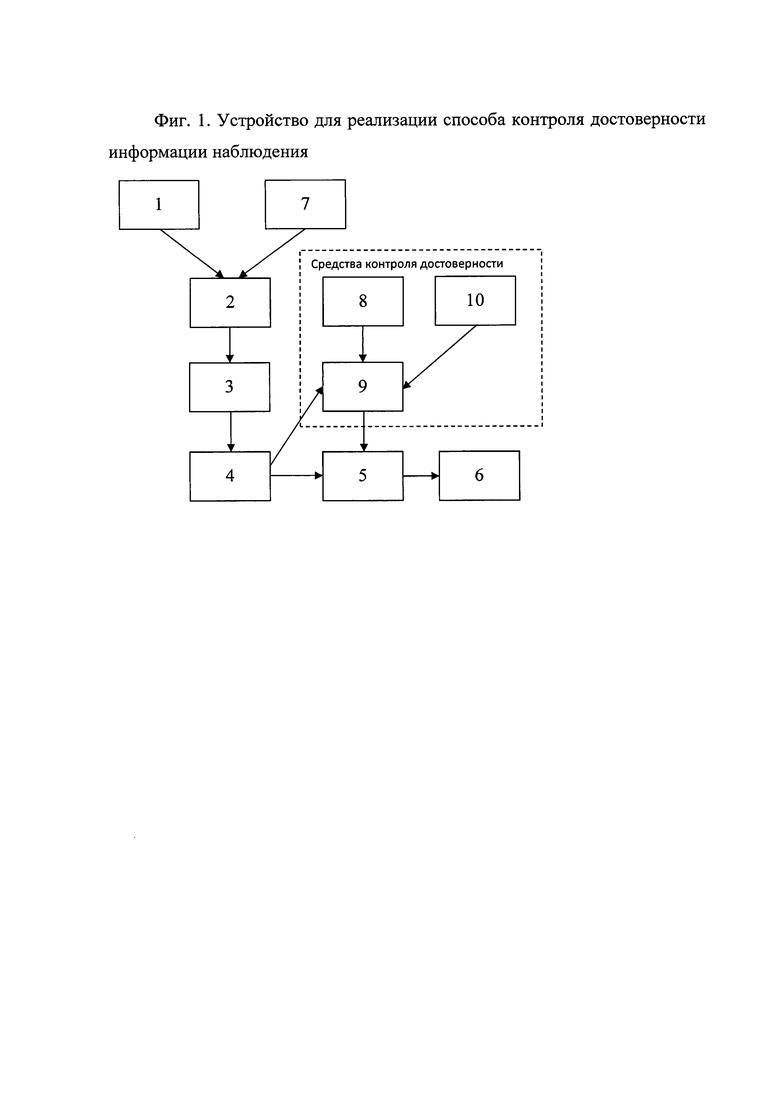
На фиг. 1 представлено устройство для реализации способа контроля достоверности информации наблюдения и введены следующие обозначения:
1. приемник сигналов СНС;
2. вычислительное устройство
3. приемопередатчик сигналов АЗН;
4. наземная станция, принимающая сигналы от АЗН;
5. устройство обработки данных наблюдения;
6. система индикации воздушной обстановки;
7. инерциальная навигационная система;
8. дополнительные наземные станции, принимающие сигналы от АЗН;
9. устройство контроля достоверности данных наблюдения;
10. база метеорологических данных.
Устройство содержит последовательно соединенные приемник 1 сигналов СНС, вычислительный модуль 2, приемопередатчик 3 сигналов АЗН, наземную станцию 4, принимающую сигналы от АЗН, устройство 5 обработки данных наблюдения и системы 6 индикации воздушной обстановки, инерциальную навигационную систему 7, выход которой соединен со вторым входом вычислительного модуля 2, причем дополнительно содержит дополнительную наземную станцию 8, принимающую сигналы от транспондера АЗН, выход которой соединен с первым входом, устройства 9 контроля достоверности данных наблюдения, выход которого соединен со вторым входом устройства 5 обработки данных наблюдения, второй вход с выходом базы 10 метеорологических данных, а третий вход со вторым выходом наземной станции, принимающей сигналы от АЗН 4.
Список литературы
1. Патент US 20110140950 Int. C1. G01S 13/74, 13/93, 13/91. Validity check of vehicle position information transmitted over a time-synchronized data link / S. Andersson. Pub. Date 16.06.2011
2. Патент CN 202770990 Int. cl. G01S 5/04, g01S 3/14, G08G 5/00. ADS-B anti-fake-object processing system / Pub. Date 6.03.2013.
3. Патент CN 104360323 Int. C1. G01S 13/91, 7/36. ADS-B deception jamming restraining method based on cross array / Pub. Date 18.02.2015.
4. Патент US 2011215960 Int. C1. G01S 13/91, H04B 1/06, 1/18. Radio receiver / M. Stevens, M. Stevens. Pub. Date 08.09.2011.
5. Патент US 2011057830 Int. C1. G01S 13/91. Method for validating aircraft traffic control data / R.G. Sampigethaya, R. Poovendran, L. Bushnell. Pub. Date 10.03.2011.
6. Патент №2667494 РФ от 21.09.2018.
7. Руководство по авиационному наблюдению. Издание второе. Doc ICAO 9924, 2017, 368 с.
8. Закон аберрации и его приложения в навигации и управлении воздушным движением: монография / А.П. Плясовских. - Москва: Знание-М, 2022. - 70 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ наблюдения за аэродромным движением и устройство для его осуществления | 2022 |
|
RU2785810C1 |
| Способ авиационного наблюдения и устройство для его осуществления | 2023 |
|
RU2808467C1 |
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ДАННЫХ СИСТЕМЫ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ | 2017 |
|
RU2667494C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ДОСТОВЕРНОСТИ ДАННЫХ СИСТЕМЫ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ (ВАРИАНТЫ) | 2024 |
|
RU2830184C1 |
| СПОСОБ ИНДИКАЦИИ ПОЛОЖЕНИЯ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2006 |
|
RU2333538C2 |
| Комплексированное приемопередающее устройство информационного обмена с летательными аппаратами | 2023 |
|
RU2805378C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2292056C2 |
| СПОСОБ КОНТРОЛЯ ДАННЫХ ОТ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2585051C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
Изобретение относится к области навигации летательных аппаратов (ЛА), предназначено для обеспечения безопасности полетов ЛА путем использования системы автоматического зависимого наблюдения (АЗН) на борту ЛА. Техническим результатом изобретения является повышение достоверности данных АЗН. Способ контроля достоверности информации наблюдения дополнительно заключается в том, что вначале задают координаты точек, в которых производится прием сигналов от АЗН, после определения координат ЛА вычисляют геометрическую высоту ЛА и дальности от точек приема до ЛА в горизонтальной плоскости, после приема сигнала АЗН определяют наличие в нем метки времени передачи сигнала, в случае отсутствия метки времени, измеряют времена приема сигнала как минимум в двух точках приема, вычисляют разницу времен приема сигнала, по разнице времен приема сигнала и координатам точек приема вычисляют гиперболу вероятного местоположения ЛА, по гиперболе вероятного местоположения ЛА и заданной погрешности определения местоположения ЛА вычисляют границы строба, проходящие от гиперболы вероятного местоположения ЛА на расстоянии заданной погрешности, и перед формированием сигнала о достоверности данных от АЗН проверяют нахождение ЛА в пределах строба. Устройство контроля достоверности информации наблюдения для осуществления способа дополнительно содержит дополнительную наземную станцию (8), устройство (9) контроля достоверности данных наблюдения и базу (10) метеорологических данных. 2 н. и 2 з.п. ф-лы, 1 ил.
1. Способ контроля достоверности информации наблюдения, заключающийся в том, что проводят прием сигналов спутниковой навигационной системы (СНС) и определяют координаты и вектор скорости летательного аппарата (ЛА), принимают сигналы системы автоматического зависимого наблюдения (АЗН) и определяют координаты ЛА, вычисляют дальности ЛА по определенным координатам, формируют временную шкалу и измеряют дальности ЛА по времени задержки сигналов АЗН, сравнивают разности упомянутых вычисленных и измеренных дальностей с заданным порогом, формируют сигнал о достоверности данных АЗН и отображают его на индикаторе воздушной обстановки, отличающийся тем, что вначале задают координаты точек, в которых производится прием сигналов от АЗН, после определения координат ЛА вычисляют геометрическую высоту ЛА и дальности от точек приема до ЛА в горизонтальной плоскости, после приема сигнала АЗН определяют наличие в нем метки времени передачи сигнала, в случае отсутствия метки времени, измеряют времена приема сигнала как минимум в двух точках приема, вычисляют разницу времен приема сигнала, по разнице времен приема сигнала и координатам точек приема вычисляют гиперболу вероятного местоположения ЛА, по гиперболе вероятного местоположения ЛА и заданной погрешности определения местоположения ЛА вычисляют границы строба, проходящие от гиперболы вероятного местоположения ЛА на расстоянии заданной погрешности, и перед формированием сигнала о достоверности данных от АЗН проверяют нахождение ЛА в пределах строба.
2. Способ по п. 1, отличающийся тем, что после проверки нахождения ЛА в пределах строба находят разность моментов времени передачи двух последовательно излучаемых одним ЛА сигналов, отдельно для каждой точки приема сигналов находят разность моментов времени принятия этих сигналов, с учетом разностей моментов времени принятия сигналов в точках приема, координат точек приема и погрешности измерения моментов времени передачи и приема сигнала определяют диапазон возможных значений вектора путевой скорости ЛА, проверяют нахождение переданного в сигнале значения вектора путевой скорости ЛА в пределах определенного диапазона, на основе чего формируют сигнал о достоверности данных АЗН.
3. Способ по п. 1, отличающийся тем, что после проверки нахождения ЛА в пределах строба находят разность моментов времени передачи двух последовательно излучаемых одним ЛА сигналов, отдельно для каждой точки приема сигналов находят разность моментов времени принятия этих сигналов, с учетом разностей моментов времени принятия сигналов в точках приема, координат точек приема и погрешности измерения моментов времени передачи и приема сигнала определяют доверительный интервал оценки радиальной скорости ЛА, проверяют нахождение переданного в сигнале значения радиальной скорости ЛА в пределах определенного доверительного интервала, на основе чего формируют сигнал о достоверности данных АЗН.
4. Устройство контроля достоверности информации наблюдения для осуществления способа по любому из пп. 1-3, содержащее последовательно соединенные приемник (1) сигналов СНС, вычислительный модуль (2), приемопередатчик (3) сигналов АЗН, наземную станцию (4), принимающую сигналы от транспондера АЗН, устройство (5) обработки данных наблюдения и систему (6) индикации воздушной обстановки, а также инерциальную навигационную систему (7), выход которой соединен со вторым входом вычислительного модуля (2), отличающееся тем, что дополнительно содержит дополнительную наземную станцию (8), принимающую сигналы от транспондера АЗН, устройство (9) контроля достоверности данных наблюдения и базу (10) метеорологических данных, причем выход дополнительной наземной станции (8) соединен с первым входом устройства (9) контроля достоверности данных наблюдения, выход устройства (9) контроля достоверности данных наблюдения соединен со вторым входом устройства (5) обработки данных наблюдения, второй вход устройства (9) соединен с базой (10) метеорологических данных, третий вход устройства (9) соединен со вторым выходом наземной станции (4).
