ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к области навигации летательных аппаратов (ЛА) и предназначено для управления воздушным движением и обеспечения безопасности полетов ЛА путем использования сигналов автоматического зависимого наблюдения (АЗН) на борту ЛА.
Задачей изобретения является создание способа и устройства, повышающих точность оценки информации наблюдения в пределах аэродрома. Технический результат изобретения заключается в повышении точности оценки информации наблюдения в районе аэродрома.
УРОВЕНЬ ТЕХНИКИ
Традиционно задача управления воздушным движением решается с помощью радаров, установленных на диспетчерских пунктах [1]. Воздушная обстановка, наблюдаемая с помощью радаров, используется для целей управления воздушным движением. Недостатками традиционного способа решения задачи являются низкий темп обновления навигационных данных (4-12 сек), низкая точность определения координат ЛА (сотни метров и более), высокая стоимость наземного оборудования и его недоступность в удаленных районах.
В настоящее время известно другое решение задачи - АЗН в режиме радиовещания (ADS-B - Automatic Dependent Surveillance - Broadcast) [2]. АЗН-В - это технология, внедряемая в настоящее время по всему миру и позволяющая на борту ЛА, а также на наземном диспетчерском пункте, видеть движение ЛА на экране индикатора воздушной обстановки без использования традиционных радаров. Преимуществами данного способа решения задачи являются высокий темп обновления навигационных данных (1 сек), высокая точность определения координат ЛА (около 1 метра), меньшая стоимость, а также доступность в удаленных районах.
Существенный недостаток АЗН заключается в низкой помехоустойчивости и отсутствии защиты от специально организованных помех (например, от ложных целей). В случае применения радара, благодаря большой мощности, а также пространственной и временной селекции сигналов, постановка специально организованных помех существенно затруднена. В системе АЗН передача умышленно недостоверных данных может быть выполнена с помощью несложного оборудования, в результате чего на экране индикатора воздушной обстановки появятся ложные отметки от несуществующих ЛА [3]. Можно предполагать, что со временем будут внедрены криптографические методы защиты системы АЗН-В, однако в современной аппаратуре они не используются [4].
В настоящее время предложен ряд способов защиты системы АЗН от помех.
Известны варианты защиты АЗН от специально организованных помех, использующие наземные многопозиционные системы наблюдения (системы мультилатерации) для определения местоположения источника радиоизлучения [5-7]. Такие варианты нуждаются в разветвленной сети наземных станций или группировке спутников, так как для определения координат этим способом требуется принимать не менее четырех сигналов. Подобный способ можно использовать в сети связанных между собой наземных станций, но затруднительно реализовать на борту ЛА.
Известны способы защиты АЗН с использованием направленных антенн или антенных решеток [8-11]. Защита от помех осуществляется сравнением измеренной угловой координаты источника сигнала, принятого с помощью направленной антенны, с вычисленной угловой координатой на основе использования пространственных координат ЛА и источника сигнала. Такие способы нуждаются в многоэлементной фазированной антенной решетке и многоканальном приемнике на борту ЛА и предполагают использование фазовой информации. Последнее требование чрезвычайно усложняет реализацию приемника, т.к. в системе АЗН сигналы имеют большой динамический диапазон порядка 80 дБ. В стандартных приемниках проблема большого динамического диапазона решается путем применения логарифмического усилителя промежуточной частоты, реализуемого на одной микросхеме. При фазовой обработке требуется многоканальный приемник с линейной обработкой и сложной системой автоматической регулировки усиления. Другим недостатком этого способа защиты при использовании на ЛА являются большие размеры антенной системы.
Известен способ защиты АЗН от помех, в котором выполняется сравнение вычисленной дальности источника сигнала, полученной с использованием пространственных координат ЛА и координат источника, с дальностью, полученной путем измерения задержки распространения сигнала [12, 13]. Этот способ не требует усложнения приемного устройства и может быть использован на борту ЛА.
Известен способ, в котором сравнение дальностей дополняется проверкой направления прихода сигнала, однако такую проверку сложно реализовать на борту ЛА [14].
Известен также способ, затрудняющий создание помех благодаря введению искажений в передаваемое сообщение [15]. Однако этот способ нарушает широковещательный принцип действия АЗН, так как предполагается, что только некоторые потребители могут восстановить точные координаты (использование такого способа ограничивает число потребителей информации системы АЗН).
Известен способ [13], основанный на сравнении вычисленной и измеренной дальности.
Недостаток способа [13] состоит в том, что предлагается способ контроля достоверности данных системы автоматического зависимого наблюдения (АЗН), предусматривающий совместное использование системы АЗН и спутниковой навигационной системы (СНС), в котором проводят прием сигналов СНС и определение координат и вектора скорости своего летательного аппарата (ЛА), прием сигналов АЗН и определение координат соседних ЛА, вычисление дальностей соседних ЛА по определенным координатам, формирование временной шкалы и измерение дальностей соседних ЛА по времени задержки сигналов АЗН, сравнение разности упомянутых вычисленных и измеренных дальностей с заданным порогом, в случае превышения упомянутой разностью заданного порога проводят формирование сигнала недостоверности данных АЗН и отображение сигнала недостоверности на индикаторе воздушной обстановки, при этом в соответствии с упомянутой временной шкалой формируют сигналы АЗН и проводят их излучение.
Наиболее близким аналогом является способ радиовещательного автоматически зависимого наблюдения [16], который принят за прототип. Способ-прототип заключается в том, что от бортовой системы GNSS и инерциальной навигационной системы на борту ЛА получают данные о местоположении, скорости ЛА и связанные с ними указатели точности и целостности данных, передают с борта ЛА данные о его местоположении (широте и долготе), абсолютной высоте, скорости, опознавательном индексе и другой информации, полученной от бортовых систем. Каждое сообщение о местоположении ADS-B включает указание на качество данных, позволяющее пользователям определить, обеспечивает ли качество информации поддержку предполагаемой функции. Принимают данные наземной станцией приема сигналов АЗН-В. Передают данные на устройство обработки данных наблюдения, откуда передают данные на систему индикации УВД.
При бортовом применении ЛА, оборудованные приемниками АЗН-В, могут обрабатывать сообщения от других ЛА для определения воздушной обстановки в рамках обеспечения таких видов применения, как CDTI.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей изобретения является создание способа и устройства, повышающих точность оценки информации наблюдения в пределах аэродрома.
Данная задача решается с помощью способа наблюдения за аэродромным движением и устройства для его осуществления.
Предлагаемый способ заключается в том, что с измерителей, расположенных на наблюдаемом объекте, в частности на летательном аппарате, передают сигналы, содержащие данные о местоположении, путевой скорости и путевом угле наблюдаемого объекта; принимают эти сигналы; выделяют из них данные о местоположении, путевой скорости и путевом угле наблюдаемого объекта, а также связанные с ними указатели точности и целостности данных; на основе выделенных из сигналов данных проводят комплексную оценку местоположения, путевой скорости и путевого угла наблюдаемого объекта, а также точности и целостности комплексных оценок местоположения, путевой скорости и путевого угла наблюдаемого объекта; формируют сигнал, содержащий опознавательный индекс наблюдаемого объекта, комплексные оценки местоположения, путевой скорости и путевого угла наблюдаемого объекта, показатели точности и целостности комплексных оценок и другие данные; передают сигнал потребителям; принимают сигнал; выделяют из сигнала данные о местоположении, путевой скорости и путевом угле наблюдаемого объекта; объединяют в один массив выделенные из разных сигналов данные о наблюдаемых объектах; отображают объединенные данные о наблюдаемых объектах. В предлагаемом способе перед формированием сигнала включают в него информацию о моменте времени передачи сигнала; перед принятием сигналов, задают аэронавигационную информацию об аэродроме, включающую данные о допустимых траекториях движения объектов, в зависимости от их типа, и связанных с ними функциях зависимости координат объекта от расстояния до точки приема сигналов; задают координаты точек приема сигналов; задают максимально допустимые разности между оцененными координатами ЛА и принятыми, вычисленной путевой скоростью ЛА и принятой, используемые для оценки достоверности этих данных; принимают плановые четырехмерные траектории ЛА, которые должны осуществить посадку на аэродром или взлет с него; после принятия сигналов определяют моменты времени приема сигналов; выделяют из сигналов информацию о моментах времени передачи сигнала с борта ЛА; определяют временной интервал между моментами времени передачи двух сигналов от одного ЛА; определяют временной интервал между моментами времени принятия этих сигналов от одного ЛА; по временным интервалам между моментами времени принятия двух сигналов от одного ЛА и между моментами времени передачи двух сигналов от одного ЛА оценивают радиальную скорость ЛА относительно точки приема сигналов; по разнице между моментами времени передачи и приема сигнала определяют расстояние от точки приема сигнала до ЛА; по аэронавигационной информации об аэродроме, плановой четырехмерной траектории ЛА, оценке радиальной скорости ЛА и расстоянию между точкой приема сигналов и наблюдаемым ЛА оценивают координаты и путевую скорость ЛА; путем сравнения разности оцененных и принятых в сигнале координат с заданной максимально допустимой их разностью, а также разности оцененной и вычисленной по данным, передаваемым в сигнале, путевой скорости, с заданной максимально допустимой их разностью, оценивают достоверность принятых в сигнале координат и путевой скорости ЛА; если эти данные достоверны, передают их потребителям, в противном случае передают потребителям оцененные координаты и путевую скорость ЛА, и отображают их на средстве отображения информации наблюдения.
Наиболее близким из числа известных технических решений касательно предлагаемого устройства является устройство реализации технологии АЗН-В [16], содержащее приемник сигналов СНС, инерциальную навигационную систему, приемопередатчик сигналов АЗН-В, наземную станцию, принимающую сигналы от АЗН-В, устройство обработки данных наблюдения и систему индикации воздушной обстановки.
Недостатком данного устройства является низкая точность информации наблюдения.
Устройство для осуществления способа согласно изобретению содержит последовательно соединенные приемник сигналов спутниковой навигационной системы, вычислительный модуль, приемопередатчик сигналов автоматического зависимого наблюдения в режиме радиовещания (АЗН-В), наземную станцию, принимающую сигналы от АЗН-В, устройство обработки данных наблюдения и инерциальную навигационную систему, выход которой соединен со вторым входом вычислительного модуля. Устройство дополнительно содержит последовательно соединенные модуль обработки плановой информации, базу аэронавигационных и плановых данных, модуль оценки координат и параметров движения объектов, выход которого соединен со вторым входом устройства обработки данных наблюдения, а второй вход со вторым выходом наземной станции, принимающей сигналы от АЗН-В, базу данных наблюдения и систему индикации воздушной обстановки, причем вход базы данных наблюдения соединен с выходом устройства обработки данных наблюдения, а выход со входом системы индикации воздушной обстановки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
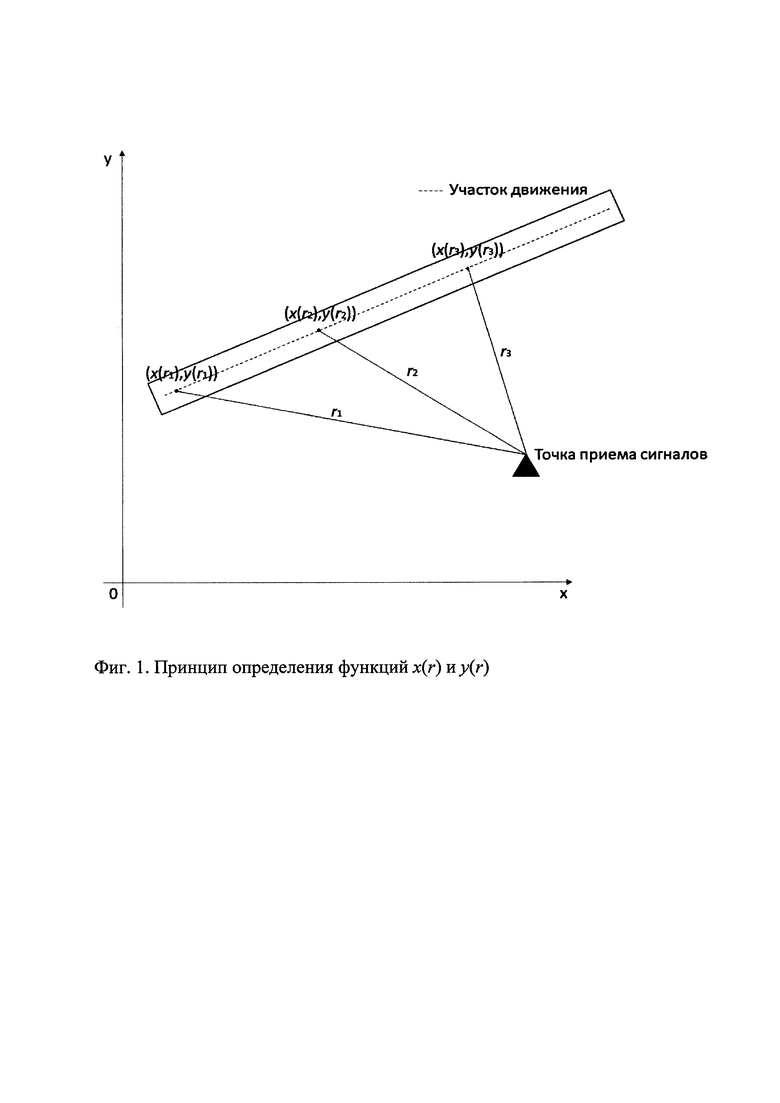
На фиг. 1 показан принцип определения функций х(r) и у(r);
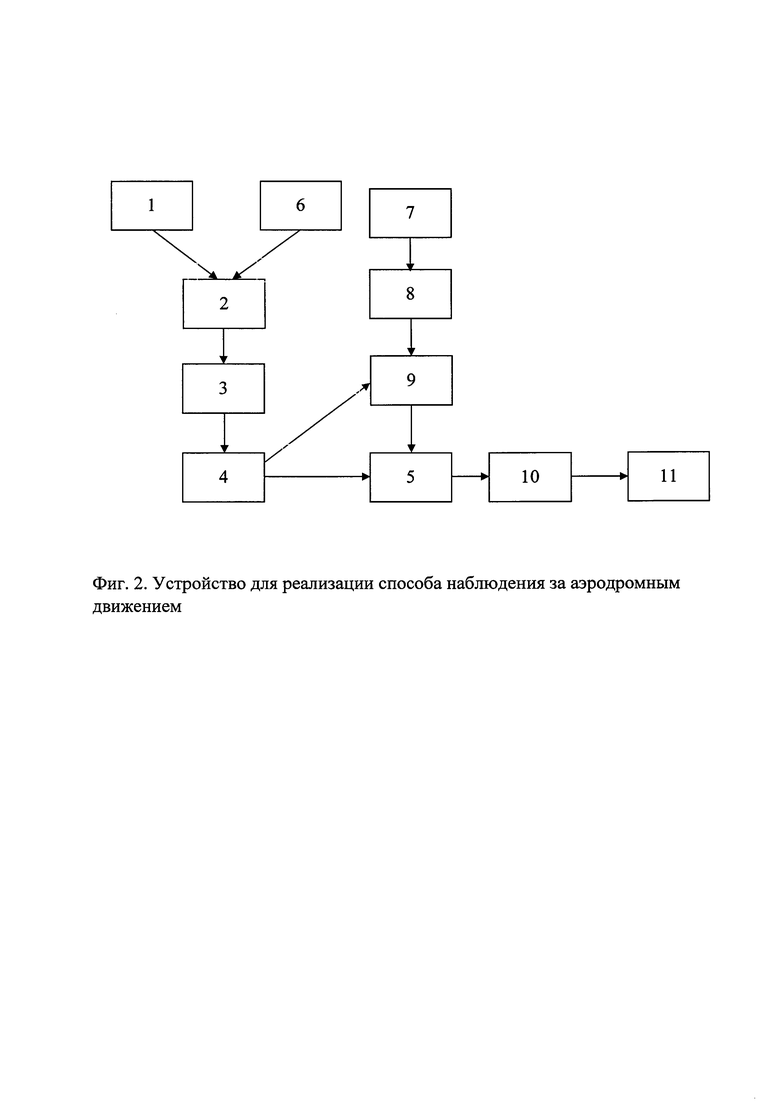
На фиг. 2 изображено устройство для реализации способа наблюдения за аэродромным движением.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Предлагаемый способ осуществляют следующим образом.
1. Задают аэронавигационную информацию об аэродроме, включающую данные о допустимых траекториях движения объектов, в зависимости от их типа, и связанных с ними функциями зависимости координат объекта от расстояния до точки приема сигналов. Например, оси взлетно-посадочных полос, рулежных дорожек, мест стоянок и других мест, где может находиться объект данного типа. Типы объектов могут быть, например, следующими: легкий ЛА, средний ЛА, тяжелый ЛА, снегоуборочная машина, транспортное средство, тягач, трап, неопознанный тип. Допустимые траектории движения объектов состоят из участков движения, определяемых как оси взлетно-посадочной полосы (ВИН), рулежных дорожек, мест стоянки и т.д. участки движения можно задавать функционально, либо в виде массивов координат, определяющих кривую.
2. Задают координаты точек приема сигналов, например, в которых расположены приемные станции АЗН.
3. Задают максимально допустимые значения отклонения параметров, проверяющихся на достоверность, вычисленных по данным, передаваемым в сигнале, от оцененных по моментам времени передачи и принятия сигнала. В случае превышения заданного порога разностью вычисленного, по данным передаваемым в сигнале, параметра и оцененного, данный параметр считается недостоверным. Максимально допустимые значения отклонения задают для следующих параметров: расстояние между ЛА и точкой приема сигнала и путевая скорость ЛА. Максимально допустимые значения отклонения параметров могут быть заданы в виде функциональных зависимостей, например, от координат объекта.
4. Для каждого участка движения с привязкой к точке приема сигнала задают по две функции х(r) и у(r), определяющие зависимости возможных координат х и у объекта, движущегося по оси участка движения, от расстояния r между наблюдаемым объектом и точкой приема сигнала. Для устранения неоднозначности каждая из двух функций х(r) и у(r) привязывается к знаку радиальной скорости объекта, в зависимости от которого по расстоянию будет определяться координата объекта. Принцип определения функций х(r) и у(r) показан на фиг. 1.
5. Принимают плановые четырехмерные траектории ЛА, которые должны осуществить посадку на аэродром или взлет с него.
6. Каждый объект получает от измерителей данные о своем местоположении, путевой скорости и путевом угле, а также связанные с ними указатели точности и целостности данных. Для ЛА данные могут поступать, например, от СНС и инерциальной навигационной системы.
7. Проводят комплексную оценку местоположения, путевой скорости и путевого угла объекта, а также точности и целостности комплексных оценок местоположения, путевой скорости и путевого угла объекта, например, путем интегрирования данных от СНС и инерциальной навигационной системы.
8. Формируют сигнал, содержащий опознавательный индекс объекта, комплексные оценки местоположения, путевой скорости и путевого угла объекта, показатели точности и целостности этих комплексных оценок, момент времени передачи сигнала и другие данные.
9. Передают сигнал потребителям, например, используя транспондер АЗН.
10. Принимают сигналы, например, станциями приема сигналов АЗН.
11. Определяют момент времени приема сигнала.
12. Выделяют из сигнала информацию о моменте времени передачи сигнала.
13. Определяют временной интервал между моментами времени передачи двух сигналов от одного ЛА Δtист.В качестве анализируемых сигналов можно брать, например, сигналы, переданные с интервалом времени 10-30 сек.
14. Определяют временной интервал между моментами времени принятия этих сигналов Δtнабл.
15. По разности времен передачи и приема сигнала оценивают расстояние между ЛА и точкой приема сигналов.
16. По временным интервалам между моментами времени принятия двух сигналов от одного ЛА и между моментами времени передачи этих сигналов от одного ЛА оценивают радиальную скорость ЛА νr относительно точки приема сигналов, например, по следующей формуле [17]:
где Δtист - интервал времени между моментами передачи сигнала источником, например, транспондером АЗН на ЛА, Δtнабл - интервал времени между моментами приема сигнала в точке приема, например, приемной станции АЗН, с - скорость света.
17. По плановой четырехмерной траектории движения ЛА из общего множества выделяют те участки движения ЛА и связанные с ними зависимости х(r) и у(r), по которым планируется движения ЛА.
18. По оцененному расстоянию между ЛА и точкой приема сигналов r, и заданным зависимостям х(r) и у(r) определяют координаты и путевой угол объекта, равный углу между севером и касательной оси участка движения в точке местоположения объекта. Путевой угол в точке (х(r), у(r)) можно вычислить на основе соседних известных точек, например,
(x(r+Δr), y(r+Δr)).
19. По оценке радиальной скорости νr и путевому углу объекта определяют путевую скорость объекта по формуле:
где ϕ - угол между текущим путевым углом объекта и прямой между объектом и точкой приема сигнала, относительно которой определяется радиальная скорость объекта.
20. Выделяют из сигнала данные о координатах, путевой скорости и путевом угле объекта.
21. По оцененным координатам ЛА, путевой скорости и принятым в сигнале данным о ЛА оценивают достоверность принятых данных, например, вычисляя разницу между передаваемой в сигнале и оцененной путевой скоростью ЛА, и разницу между передаваемыми в сигнале и оцененными координатами ЛА, сравнивая соответствующую разницу с соответствующей пороговой величиной. В случае превышения порога данные считаются не достоверными.
22. Если данные достоверны, передают их потребителям, в противном случае заменяют координаты и путевую скорость объекта на оцененные по моментам времени передачи и приема сигналов и передают потребителям.
23. Объединяют выделенные из разных сигналов данные, формируя единый массив данных о всех наблюдаемых объектах.
24. Отображают объединенные данные.
На фиг. 2 представлено устройство для реализации способа наблюдения за аэродромным движением. На фиг. 2 введены следующие обозначения:
1. приемник сигналов СНС;
2. первое вычислительное устройство;
3. приемопередатчик сигналов АЗН-В;
4. наземная станция, принимающая сигналы от АЗН-В;
5. модуль обработки данных наблюдения;
6. инерциальная навигационная система;
7. модуль обработки плановой информации
8. база аэронавигационных и плановых данных;
9. модуль оценки координат и параметров движения объектов;
10. база данных наблюдения;
11. система индикации воздушной обстановки.
В базу 8 аэронавигационных и плановых данных загружается аэронавигационная информация, например, путем копирования данных с флеш-накопителя, оптического носителя информации или передачи данных по сети. Модуль 7 обработки плановой информации передает плановую информацию в базу 8 аэронавигационных и плановых данных, где происходит ее сохранение. По другому каналу информации приемник 1 сигналов СНС и инерциальная навигационная система 6 передают в первое вычислительное устройство 2 сигналы, содержащие данные о местоположении, путевой скорости и путевом угле наблюдаемого объекта, а также связанные с ними указатели точности и целостности данных. В первом вычислительном устройстве 2 проводится комплексная оценка местоположения, путевой скорости и путевого угла наблюдаемого объекта, а также точности и целостности комплексных оценок местоположения, путевой скорости и путевого угла наблюдаемого объекта, и оцененные данные передаются в приемопередатчик 3 сигналов АЗН-В, где формируется сигнал, содержащий эти данные и опознавательный индекс наблюдаемого объекта, который передается в наземную станцию 4, принимающую сигналы от АЗН-В. В модуле 5 обработки данных наблюдения из сигнала от наземной станции 4, принимающей сигналы от АЗН-В, выделяются данные о местоположении, путевой скорости и путевом угле наблюдаемого объекта, выделенные из разных сигналов данные о наблюдаемых объектах объединяются в один массив. Также в модуле 5 обработки данных наблюдения от модуля 9 оценки координат и параметров движения объектов выделяются данные о координатах и параметрах движения объектов, оценивается их достоверность, добавляется в сформированное сообщение метка о достоверности данных и оцененные данные передаются в базу 10 данных наблюдения. Достоверные данные передаются из базы 10 данных наблюдения в систему 11 индикации воздушной обстановки, которая их отображает.
Список литературы
1. Сосновский А.А. и др. Авиационная радионавигация, справочник. - М.: Транспорт, 1990.
2. Автоматизированные системы управления воздушным движением: Новые информационные технологии в авиации: Учебное пособие / P.M. Ахмедов, А.А. Бибутов, А.В. Васильев и др.; под ред. С.Г. Пятко и А.И. Красова. СПб.: Политехника, 2004.
3. A. Costin and A. Francillon. "Ghost in the Air (Traffic): On insecurity of ADS-B protocol and practical attacks on ADS-B devices," conf. Black Hat USA, 2012.
4. Strohmeier M., Lenders V., Martinovic I., On the Security of the Automatic Dependent Surveillance-Broadcast Protocol // IEEE Communication Surveys & Tutorials. 2015, T. 17, N2, p.1066-1087.
5. Патент US 2008211709 Int. C1. G01S 3/02. Deployable passive broadband aircraft tracking / A.E. Smith, R. Hulstrom, C.A. Evers. Pub. Date 04.09.2008.
6. Патент US 2010149019 Int. C1. G01S 13/93, 1/24, 3/02, 19/24, 5/02. Method and apparatus for ADS-B validation, active and passive multilateration, and elliptical surveillance / A.E. Smith, R. Hulstrom, C.A. Evers, T.J. Breen. Pub. Date 17.06.2010.
7. Патент US 7570214 Int. C1. G01S 13/93, 1/24, 3/02, 19/24, 5/02. Method and apparatus for ADS-B validation, active and passive multilateration, and elliptical surveillance / A.E. Smith, R. Hulstrom, C.A. Evers, T.J. Breen. Pub. Date 04.08.2009.
8. Патент CN 202770990 Int. c1. G01S 5/04, g01S 3/14, G08G 5/00. ADS-B anti-fake-object processing system / Pub. Date 6.03.2013.
9. Патент CN 104360323 Int. C1. G01S 13/91, 7/36. ADS-B deception jamming restraining method based on cross array / Pub. Date 18.02.2015.
10. Патент US 2011215960 Int. C1. G01S 13/91, H04B 1/06, 1/18. Radio receiver / M. Stevens, M. Stevens. Pub. Date 08.09.2011.
11. Патент US 2011057830 Int. C1. GOlS 13/91. Method for validating aircraft traffic control data / R.G. Sampigethaya, R. Poovendran, L. Bushnell. Pub. Date 10.03.2011.
12. Патент RU 2333538 C2. МПК G08G 5/00, B64D 45/00. Способ индикации положения объектов наблюдения / С.Г. Пятко, Э.Я. Фальков, А.И. Красов и др., заявл. 12.07.2006, опубл. 10.09.2008, Бюл. №25.
13. Патент US 20110140950 Int. C1. G01S 13/74, 13/93, 13/91. Validity check of vehicle position information transmitted over a time-synchronized data link / S. Andersson. Pub. Date 16.06.2011.
14. Патент US 20110163908 Int. C1. G01S 13/74, 1/24. Validity check of vehicle position information / S. Andersson, A. Persson. Pub. Date 07.07.2011.
15. Патент US 2014/0327564 A1 Intel. G08G 5/0004. System and method to prevent misuse of aircraft messages / Radhakrishna G. Sampigethaya. Pub. Date 06.11.2014.
16. Doc 9924. Руководство по авиационному наблюдению. Издание третье AN/474. - 2020 / Международная организация гражданской авиации, 429 с.
17. Плясовских А.П. Закон аберрации и его приложения в навигации и управлении воздушным движением. - М.: Знание-М, 2022. - 70 с. - ISBN 978-5-00187-223-8.
Группа изобретений относится к области навигации ЛА и предназначена для управления воздушным движением и обеспечения безопасности полетов путем использования сигналов автоматического зависимого наблюдения на борту ЛА. Задают аэронавигационную информацию об аэродроме, координаты точек приема сигналов, максимально допустимые разности между оцененными координатами ЛА и принятыми, вычисленной путевой скоростью и принятой. Принимают плановые четырехмерные траектории ЛА. Выделяют из сигналов информацию о моментах времени передачи сигнала с борта ЛА. Определяют временной интервал между моментами времени передачи двух сигналов от одного ЛА. Определяют временной интервал между моментами времени принятия этих сигналов. Оценивают радиальную скорость относительно точки приема сигналов. Определяют расстояние от точки приема сигнала до ЛА. Оценивают координаты и путевую скорость. Оценивают достоверность принятых в сигнале координат и путевой скорости. Устройство содержит модуль обработки плановой информации, базу аэронавигационных и плановых данных, модуль оценки координат и параметров движения объектов, базу данных наблюдения, систему индикации воздушной обстановки. Повышается точность оценки информации наблюдения в районе аэродрома. 2 н.п. ф-лы, 2 ил.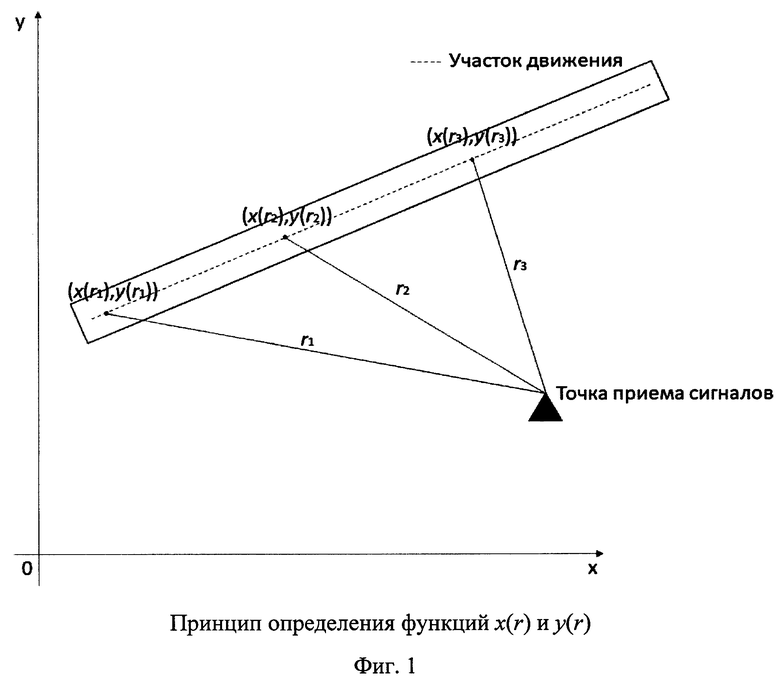
1. Способ наблюдения за аэродромным движением, заключающийся в том, что с измерителей, расположенных на наблюдаемом объекте, в частности на летательном аппарате, передают сигналы, содержащие данные о местоположении, путевой скорости и путевом угле наблюдаемого объекта, принимают эти сигналы, выделяют из них данные о местоположении, путевой скорости и путевом угле наблюдаемого объекта, а также связанные с ними указатели точности и целостности данных, на основе выделенных из сигналов данных проводят комплексную оценку местоположения, путевой скорости и путевого угла наблюдаемого объекта, а также точности и целостности комплексных оценок местоположения, путевой скорости и путевого угла наблюдаемого объекта, формируют сигнал, содержащий опознавательный индекс наблюдаемого объекта, комплексные оценки местоположения, путевой скорости и путевого угла наблюдаемого объекта, показатели точности и целостности комплексных оценок и другие данные, передают сигнал потребителям, принимают сигнал, выделяют из сигнала данные о местоположении, путевой скорости и путевом угле наблюдаемого объекта, объединяют в один массив выделенные из разных сигналов данные о наблюдаемых объектах, отображают объединенные данные о наблюдаемых объектах,
отличающийся тем, что
перед формированием сигнала включают в него информацию о моменте времени передачи сигнала, перед принятием сигналов задают аэронавигационную информацию об аэродроме, включающую данные о допустимых траекториях движения объектов, в зависимости от их типа, и связанных с ними функциях зависимости координат объекта от расстояния до точки приема сигналов, задают координаты точек приема сигналов, задают максимально допустимые разности между оцененными координатами ЛА и принятыми, вычисленной путевой скоростью ЛА и принятой, используемые для оценки достоверности этих данных, принимают плановые четырехмерные траектории ЛА, которые должны осуществить посадку на аэродром или взлет с него, после принятия сигналов определяют моменты времени приема сигналов, выделяют из сигналов информацию о моментах времени передачи сигнала с борта ЛА, определяют временной интервал между моментами времени передачи двух сигналов от одного ЛА, определяют временной интервал между моментами времени принятия этих сигналов от одного ЛА, по временным интервалам между моментами времени принятия двух сигналов от одного ЛА и между моментами времени передачи двух сигналов от одного ЛА оценивают радиальную скорость ЛА относительно точки приема сигналов, по разнице между моментами времени передачи и приема сигнала определяют расстояние от точки приема сигнала до ЛА, по аэронавигационной информации об аэродроме, плановой четырехмерной траектории ЛА, оценке радиальной скорости ЛА и расстоянию между точкой приема сигналов и наблюдаемым ЛА оценивают координаты и путевую скорость ЛА, путем сравнения разности оцененных и принятых в сигнале координат с заданной максимально допустимой их разностью, а также разности оцененной и вычисленной по данным, передаваемым в сигнале, путевой скорости с заданной максимально допустимой их разностью оценивают достоверность принятых в сигнале координат и путевой скорости ЛА, если эти данные достоверны, передают их потребителям, в противном случае передают потребителям оцененные координаты и путевую скорость ЛА и отображают их на средстве отображения информации наблюдения.
2. Устройство для осуществления способа по п. 1, содержащее последовательно соединенные приемник (1) сигналов спутниковой навигационной системы, вычислительный модуль (2), приемопередатчик (3) сигналов автоматического зависимого наблюдения в режиме радиовещания (АЗН-В), наземную станцию (4), принимающую сигналы от АЗН-В, устройство (5) обработки данных наблюдения и инерциальную навигационную систему (6), выход которой соединен со вторым входом вычислительного модуля (2),
отличающееся тем, что
дополнительно содержит последовательно соединенные модуль (7) обработки плановой информации, базу (8) аэронавигационных и плановых данных, модуль (9) оценки координат и параметров движения объектов, выход которого соединен со вторым входом устройства (5) обработки данных наблюдения, а второй вход со вторым выходом наземной станции (4), принимающей сигналы от АЗН-В, базу (10) данных наблюдения и систему (11) индикации воздушной обстановки, причем вход базы (10) данных наблюдения соединен с выходом устройства (5) обработки данных наблюдения, а выход с входом системы (11) индикации воздушной обстановки.
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ДАННЫХ СИСТЕМЫ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ | 2017 |
|
RU2667494C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Способ одновременного измерения вектора скорости летательного аппарата и дальности до наземного объекта | 2016 |
|
RU2658115C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2020 |
|
RU2746058C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УЛАВЛИВАНИЯ И СБОРА КАМНЕЙ К ЗЕРНОУБОРОЧНОМУ КОМБАЙНУ | 0 |
|
SU211194A1 |
| Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации | 2020 |
|
RU2776856C2 |
| US 20110140950 А1, 16.06.2011. | |||

