Изобретение относится к области робототехники, а именно к беспилотным летательным аппаратам (БЛА) и комплексам авианаблюдения, и может использоваться для дистанционного термозондирования, выявления утечек тепла, а так же для осуществления контроля и охраны периметров особо важных объектов.
Известен Привязной коптер (патент на изобретение Российской Федерации МПК В64С 27/08 RU №2018145055 С1, Бюл. №35 от 13.12.2019), содержащий каркас с размещенными на нем электродвигателями с автоматами перекоса винтов, системой управления с гироскопом и радиоэлектронной, гибкую тягу в виде силового, энергетического и информационного кабеля. При этом каркас снизу снабжен плоским чехлом, а сверху - сферическим чехлом, имеющим аэродинамический профиль, причем сферический чехол заполнен неэластичным пористым материалом. Обеспечивается упрощение технологии изготовления и уменьшение веса конструкции.
Названный аналог не позволяет осуществлять теплометрические исследования в малых пространствах ввиду невозможности оборудования летательного аппарата тепловизным комплексом без потери необходимой мобильности. Также аналогом является Мобильный робототехнический комплекс по патенту МКП B25J 5/00, RU №2364500 С2, Бюл. №23 от 20.08.2009. Владелец патента открытое акционерное общество «КОВРОВСКИЙ ЭЛКТРОМЕХАНИЧЕСКИЙ ЗАВОД» (ОАО «КЭМЗ») (RU). Изобретение относится к робототехнике а именно к робототехническим комплексам предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах.
Мобильный робототехнический комплекс включает мобильный робот, пост дистанционного управления, бортовую телевизионную систему, которая включает отдельные видеоблоки. Мобильный робототехнический комплекс снабжен выносной системой видеонаблюдения. Мобильный робот дополнительной включает комплект дополнительного оборудования - раздвижную телескопическую штанку-удлинитель, с узом вертикального крепления ее в кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, на другом конце.
Как следует из описания, названный аналог не позволяет осуществлять гибкое конфигурирование системы беспилотного летательного аппарата, что в свою очередь ведет к невозможности осуществления теплометрического процесса.
Также известен инфракрасный дрон по патенту Китая №202011209273.9 от 2020.11.03. Камеры снимают тепловые изображения зданий, 3D реконструкция существующих зданий. Таким образом, получаются трехмерная модель в градациях серого и ортофотоизображения. Ортофотоизображение соответствует функциональной взаимосвязи между температурой и уровнем выбросов. Используется FME, чтобы растянуть карту оттенков серого, чтобы получить новую карту цветов, затем новая цветовая карта устанавливается на синий канал уровня RGB. Записывается значение температуры в синюю полосу в процесс. Считываются цветовые ЗБ-модели облаков точек для получения информации о температуре. Этот метод является существующим. Испытание тепловых характеристик ограждающих конструкций обеспечивает всестороннее, быстрое, точные инструменты оценки, не только для ограждающих конструкций одного здания энергосберегающего обнаружения. Также подходит для ограждающих конструкций нескольких зданий в региональном масштабе. Этим обеспечивается структурный мониторинг производительности.
Недостатком данной системы является повышенная сложность, поскольку суммарное изображение получается в результате 3D текстурной модели состоящей из 743 фрагментов.
Наиболее близким по технической сущности является трехсредный мобильный аппарат «Этажерка» по патенту МКП B60F 5/02, RU №2706748 С1,от 20.08.2009.
Устройство относится к беспилотным летательным аппаратам, способным функционировать в воздухе, на суше, на поверхности водоема, в толще воды и на дне водоема. Трехсредный мобильный аппарат содержит амфибийный модуль в виде самоходного шасси с энергетической установкой и насосной станцией, а также с сухопутным и водоходным движениями, поплавковый модель над амфибийным модулем, устройство взаимосвязи поплавкового и амфибийного модулей и систему управления роботом. Аппарат дополнительно снабжен летательным модулем вертикального взлета-посадки вертолетного типа, расположенным в состыкованном состоянии над поплавковым модулем. Грузоподъемность летательного модуля свыше веса остальной части аппарата. Имеется устройство взаимосвязи летательного и поплавкового модулей. Оба упомянутых устройства взаимосвязи модулей выполнены с возможностью независимо друг от друга обратимой расстыковки в эксплуатационных условиях. Обеспечивается повышение технико-эксплуатационных характеристик аппарата за счет расширения его возможностей, при этом беспилотный летательный аппарат содержит информационную систему и систему стабилизации, а также может эксплуатироваться с передвижным модулем с посадочной площадкой для беспилотного летательного аппарата, снабженным каналом связи между передвижным модулем и беспилотным летательным аппаратом.
Недостатком такой конструкции является наличие аккумулятора у беспилотного летательного аппарата, что существенно увеличивает его массу.
Изобретение направлено на обеспечение уменьшения массы беспилотного летательного аппарата.
Это достигается тем, что мобильный робототехнический комплекс, содержащий беспилотный летательный аппарат с информационной системой и системой стабилизации, а также передвижной модуль с посадочной площадкой для беспилотного летательного аппарата, и канал связи между передвижным модулем и беспилотным летательным аппаратом, согласно изобретению канал связи выполнен в виде нагруженных растяжением проводов, на передвижном модуле установлена катушка с регулятором натяжения проводов, причем на передвижном модуле установлены также датчики направления смещения проводов, выполненные в виде двух перпендикулярно расположенных в плоскости посадочной площадки вилок в перекрестие которых размещен провод, причем сами вилки снабжены штангами соединенными нижние концы которых соединены с датчиками положения.
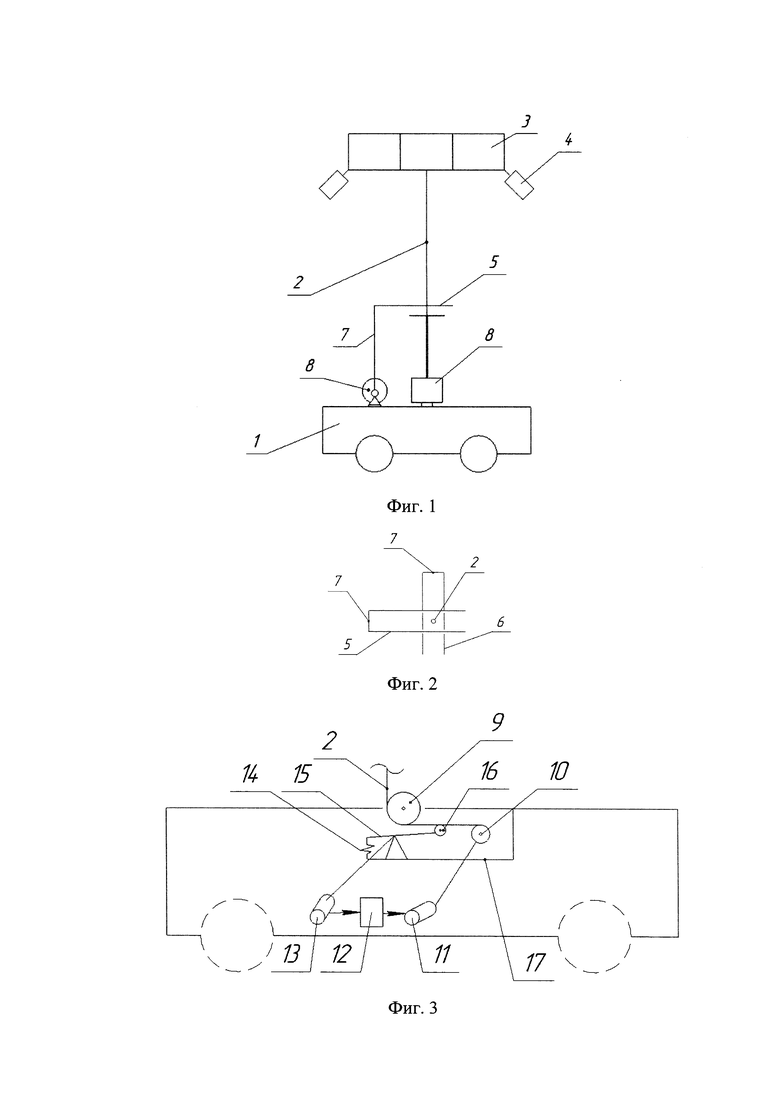
Сущность изобретения иллюстрируется чертежом, где на фиг. 1 показан мобильный робототехнический комплекс, вид сбоку, на фиг. 2 показан провод в поперечном сечении, на пересечении в двух плоскостях двух перпендикулярно расположенных вилок, на фиг. 3 схематично показан передвижной модуль с регулятором натяжения.
Мобильный робототехнический комплекс содержит передвижной модуль 1 с посадочной площадкой для беспилотного летательного аппарата, провода 2, образующие канал связи между передвижным модулем и беспилотным летательным аппаратом 3, который снабжен датчиками наблюдения, например видеокамерами 4. Провод 2 находится в перекрестии двух перпендикулярно расположенных в плоскости посадочной площадки вилок 5 и 6. Вилки снабжены штангами 7, нижние концы которых соединены с датчиками положения 8 и совмещенными с ними приводами отведения вилок (на рисунке не показано). Рассмотрим более подробно устройство натяжения. Оно включает в себя направляющий ролик 9, барабан 10 с проводом и контактными кольцами, привод 11 вращения катушки, который управляется регулятором 12, на вход которого поступает сигнал от датчика 13 положения подпружиненного пружиной 14 рычага 15 с роликом 16 контроля натяжения. Регулятор с устройством натяжения установлены на основании 17.
Мобильный робототехнический комплекс функционирует следующим образом. Передвижной модуль с посадочной площадкой и беспилотным летательным аппаратом перемещается по заранее заданной программе, например, по периметру охраняемого объекта. В начальном положении штанги 7 отведены на 90 градусов по сравнению с положением, показанным на фиг. 1. Далее осуществляется взлет летательного аппарата и подведение вилок в перекрестие по отношению к проводу, которое осуществляется приводами, совмещенными с датчиками 8. После захвата провода летательный аппарат поднимается на необходимую высоту, ограниченную длиной провода 2, при этом приводы подведения вилок отключаются, и штанги 7 воздействуют только на датчики 8. Передвижной модуль начинает движение по заданному контуру с использованием либо своих датчиков положения, либо по принципу робокара, осуществляя слежение в пределах нанесенной заранее линии, например белого цвета. Это движение приводит к тому, что провод 2 осуществляет давление на вилки 5 и 6, которые, смещаясь через штангу 7, формируют сигнал пропорциональный смещению. При этом возможны два режима слежения:
- режим слежения БПЛА за передвижным модулем;
- режим слежения передвижного модуля за БПЛА, перемещение которого формируется отдельной программой.
В любом случае эти перемещения отслеживаются с помощью вилок 5 и 6, которые затем преобразуются в сигналы датчиков 8. Возможные колебания высоты летательного аппарата, например, вследствие ветрового воздействия, и приводящие к ослаблению или чрезмерному натяжению провода компенсируются регулятором натяжения. Стрела провиса, которая контактирует с роликом 16, который установлен на рычаге 15. Положение рычага 15, подпружиненого пружиной 14 улавливается датчиком 13, который формирует задание для регулятора 12, который в свою очередь воздействует на привод 11 и барабан 10.
Технико-экономическим преимуществом данного комплекса является отсутствие аккумуляторов на летательном аппарате, двигатели которого запитываются по проводам 2, по этому же каналу могут передаваться и информационные сигналы. Таким образом возможно применение более массивных, но и более дешевых аккумуляторов, которые установлены на передвижном модуле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робототехнический комплекс | 2023 |
|
RU2836437C2 |
| Робот мобильный | 2024 |
|
RU2834078C1 |
| Колесо мобильного робота | 2024 |
|
RU2835523C1 |
| Трёхсредный мобильный аппарат "Этажерка" | 2019 |
|
RU2706748C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Многофункциональный центр управления движением и моделирования динамики летательных аппаратов | 2017 |
|
RU2646784C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ ДЛЯ ПОИСКА И МАРКИРОВКИ ВЗРЫВООПАСНЫХ ПРЕДМЕТОВ | 2024 |
|
RU2822025C1 |
| Робототехнический комплекс и способ его эксплуатации на высотных объектах, относящихся к электроэнергетике и радиосвязи | 2019 |
|
RU2715682C1 |
Мобильный робототехнический комплекс содержит беспилотный летательный аппарат и передвижной модуль с посадочной площадкой. Беспилотный летательный аппарат содержит информационную систему и систему стабилизации. Передвижной модуль содержит посадочную площадку для беспилотного летательного аппарата, канал связи между передвижным модулем и беспилотным летательным аппаратом, выполненный в виде нагруженных растяжением проводов, катушку с регулятором натяжения проводов, датчики направления смещения проводов, выполненные в виде двух перпендикулярно расположенных в плоскости посадочной площадки вилок, в перекрестие которых размещен провод, а нижние части вилок снабжены штангами, нижние концы которых соединены с датчиками положения. Обеспечивается уменьшение массы беспилотного летательного аппарата. 3 ил.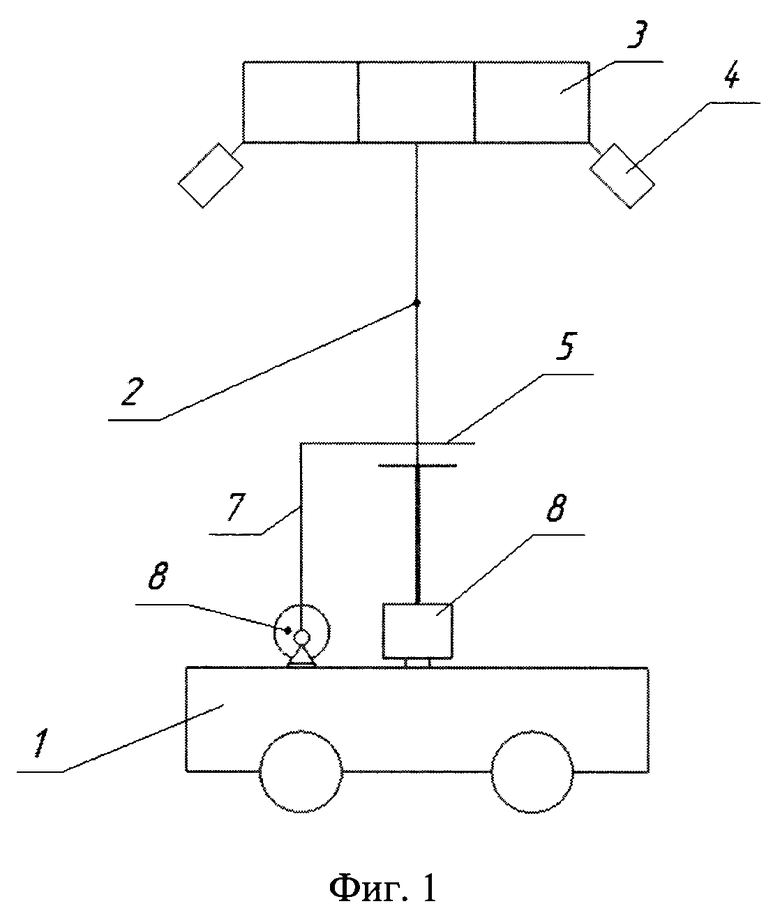
Мобильный робототехнический комплекс, содержащий беспилотный летательный аппарат с информационной системой и системой стабилизации, а также передвижной модуль с посадочной площадкой для беспилотного летательного аппарата и канал связи между передвижным модулем и беспилотным летательным аппаратом, отличающийся тем, что канал связи выполнен в виде нагруженных растяжением проводов, на передвижном модуле установлена катушка с регулятором натяжения проводов, причем на передвижном модуле установлены также датчики направления смещения проводов, выполненные в виде двух перпендикулярно расположенных в плоскости посадочной площадки вилок, в перекрестие которых размещен провод, причем сами вилки снабжены штангами, нижние концы которых соединены с датчиками положения.
| US 9446858 B2, 20.09.2016 | |||
| СИСТЕМА НАБЛЮДЕНИЯ ЗА ЗЕМНОЙ ПОВЕРХНОСТЬЮ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2323851C1 |
| RU 2021120268 A, 09.01.2023 | |||
| WO 2019226917 A1, 28.11.2019 | |||
| US 20180251216 A1, 06.09.2018 | |||
| US 11148802 B1, 19.10.2021. | |||

