Изобретение относится к робототехнике, а именно к мобильным роботам робототехнических комплексов, предназначенных для исследования территорий производственных и муниципальных структур и передачи результатов исследования для дальнейшей обработки оператором.
Известен мобильный робот, входящих в состав мобильного робототехнического комплекса, по патенту РФ №2808484, заявка №2023103543 от 15.02.2023, опубл. 28.11.2023, Бюл. №34, владелец патента ВГТУ, который содержит беспилотный летательный аппарат и передвижной модуль с посадочной площадкой. Беспилотный летательный аппарат содержит информационную систему и систему стабилизации. Передвижной модуль содержит посадочную площадку для беспилотного летательного аппарата, канал связи между передвижным модулем и беспилотным летательным аппаратом, выполненный в виде нагруженных растяжением проводов, катушку с регулятором натяжения проводов, датчики направления смещения проводов, выполненные в виде двух перпендикулярно расположенных в плоскости посадочной площадки вилок, в двух перпендикулярно расположенных в плоскости посадочной площадки вилок, в перекрестие которых размещен провод, а нижние части вилок снабжены штангами, нижние концы которых соединены с датчиками положения.
Недостатком данного мобильного робота является пониженная энергоэффективность, поскольку и беспилотный летательный аппарат и передвижной модуль снабжаются аккумуляторами пониженной емкости.
Наиболее близким аналогом является робот мобильный, входящий в состав мобильного робототехнического комплекса по патенту МПК B25J5/00, RU №2364500 С2, Бюл. №23 от 20.08.2009. Владелец патента открытое акционерное общество «КОВРОВСКИЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЗАВОД» (ОАО «КЭМЗ» (RU). Изобретение относится к робототехнике, а именно к робототехническим комплексам, предназначенных для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Мобильный робототехнический комплекс включает мобильны робот, пост дистанционного управления, бортовую телевизионную систему, которая включает отдельные видеоблоки. Мобильный робототехнический комплекс снабжен выносной системой видеонаблюдения. Мобильный робот дополнительно включает комплекс дополнительного оборудования - раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, на другом конце. При этом мобильный робот включает в себя двигатель с приводом, установленный на оси, направляющий элемент, средства питания, управления, и информационного обеспечения, а также раму.
Таким образом, робот содержит передвижной модуль с установленным оборудованием и канал связи между передвижным модулем и базой.
Недостатком названного аналога является его малая энергоэффективность вызванная малой емкость аккумулятора.
Изобретение направлено на увеличение радиуса действия робота путем осуществления внешнего подвода энергии на начальном участке передвижения робота.
Это достигается тем, что робот, мобильный содержащий передвижной модуль с установленным оборудованием, аккумулятором и канал связи между передвижным модулем и базой, согласно изобретению, канал связи выполнен в виде катушки с внутренней намоткой и проводом, установленной на роботе, при этом внешний конец провода связан с базой, а внутренний конец робота связан со штекерами, входящими в гнезда, которые установлены в торце корпуса катушки.
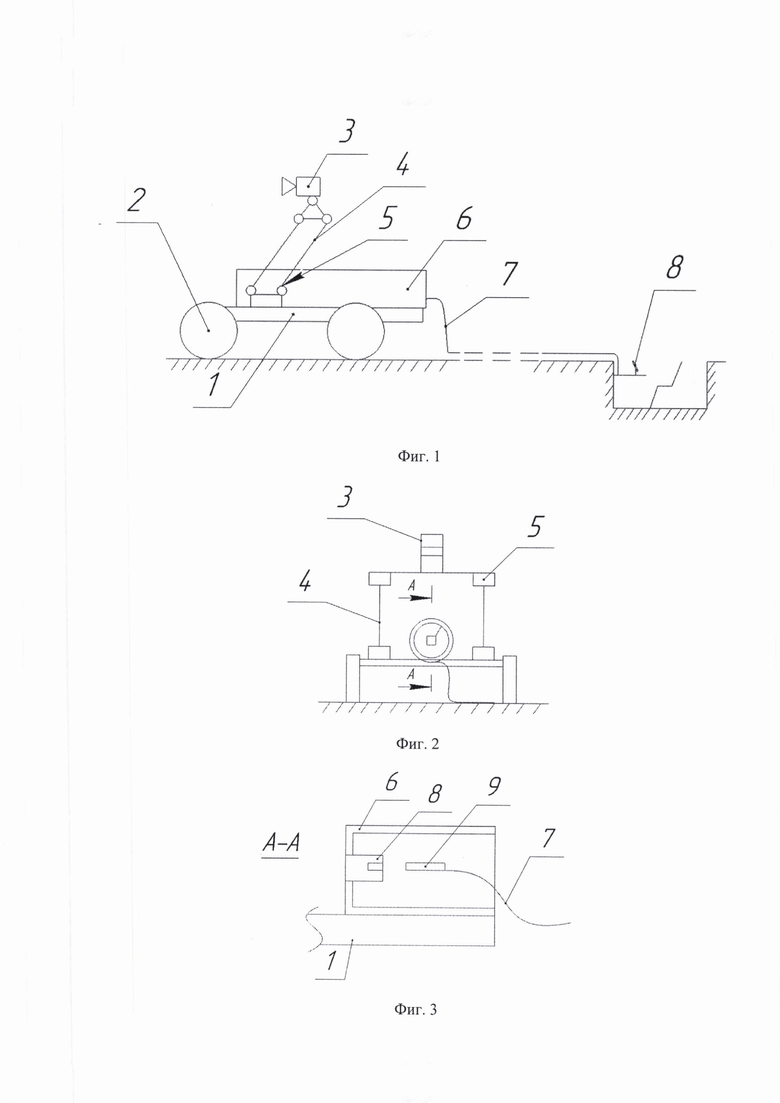
Сущность изобретения иллюстрируется чертежом, где на фиг. 1 показан робот мобильный вид сбоку, фиг. 2 показан вид сзади, фиг.3 показан разрез по катушке в момент отделения (расстыковки) штекеров и гнезд.
Робот содержит подвижную платформу 1 с колесными движителями 2 и аккумуляторами, информационное оборудование, например, видеокамеру 3, которая установлена на подъемном параллелограмме 4 с приводами 5, катушку внутренней намотки, имеющей корпус катушки 6 с кабелем 7, который внешним концом присоединен к базе 8, которая в общем случае содержит пост оператора и управления. Торец корпуса катушки 6 имеет колодку 8 с гнездами, в которую входят штекера 9.
Робот мобильный функционирует следующем образом. В начале перемещения основная масса кабеля намотана изнутри корпуса 6 катушки, штекера 9 входят в гнезда колодки 8. При этом питание может осуществляться по кабелю 7. Энергия аккумуляторов не расходуется (фиг. 1). При преодолении некоторого расстояния, определяемого длиной кабеля 7, производится сматывание проводов с внутренней стороны корпуса 6 катушки, при полном сматывании кабеля происходит его натяжение и автоматическое рассоединенные штекеров 9 из гнезд, установленных в колодке 8 - фиг. 3. Дальнейшее движение происходит за счет энергии аккумулятора и управления по радиоканалу.
Технико-экономическим преимуществом является способность робота мобильного к действию на повышенном радиусе, за счет того, что часть пути может быть преодолена не за счет энергии аккумулятора, а за счет питания по кабелю 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робототехнический комплекс | 2023 |
|
RU2808484C1 |
| Колесо мобильного робота | 2024 |
|
RU2835523C1 |
| Мобильный робототехнический комплекс | 2023 |
|
RU2836437C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2709074C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2574547C2 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Многофункциональный центр управления движением и моделирования динамики летательных аппаратов | 2017 |
|
RU2646784C1 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
Изобретение относится к области робототехники и может быть использовано в мобильных робототехнических комплексах, предназначенных для исследования территорий производственных и муниципальных структур и передачи результатов исследования для дальнейшей обработки оператором. Мобильный робот содержит передвижной модуль с установленными на нем оборудованием, аккумулятором и каналом связи между передвижным модулем и базой, при этом канал связи выполнен в виде кабеля, намотанного на катушку, установленную на модуле, внешний конец кабеля связан с базой, а внутренний конец кабеля посредством штекеров подключен к соответствующим гнездам модуля. При этом катушка выполнена с внутренней намоткой, а упомянутые гнезда установлены в торце корпуса катушки, при этом штекеры и гнезда выполнены с возможностью их разъединения в результате натяжения кабеля при его полном сматывании с катушки. Использование изобретения позволяет увеличить радиус действия мобильного робота за счет внешнего подвода энергии на начальном участке его передвижения. 3 ил.
Мобильный робот, содержащий передвижной модуль с установленными на нем оборудованием, аккумулятором и каналом связи между передвижным модулем и базой, при этом канал связи выполнен в виде кабеля, намотанного на катушку, установленную на модуле, внешний конец кабеля связан с базой, а внутренний конец кабеля посредством штекеров подключен к соответствующим гнездам модуля, отличающийся тем, что катушка выполнена с внутренней намоткой, а упомянутые гнезда установлены в торце корпуса катушки, при этом штекеры и гнезда выполнены с возможностью их разъединения в результате натяжения кабеля при его полном сматывании с катушки.
| CN 114458866 A, 10.05.2022 | |||
| МОБИЛЬНЫЙ МОДУЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2021 |
|
RU2771402C1 |
| Мобильный робототехнический комплекс | 2015 |
|
RU2612115C1 |
| RU 227119 U1, 08.07.2024 | |||
| US 2020094413 A1, 26.03.2020 | |||
| US 4932831 A1, 12.06.1990. | |||

