Изобретение относится к области радионавигации и может быть использовано, например, для однозначного определения углового положения в азимутальной плоскости источника излучения с заранее неизвестной длиной волны фазовым пеленгатором, размещенным на квадрокоптере.
При применении фазового метода пеленгации в одной плоскости (одномерного пеленгования) необходимы минимум две антенны, разнесенные на расстояние L, называемое базой. [Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. М.: Сов. радио, 1975. 336 с.: ил., стр. 91-93]. Способ основан на том, что за счет разноса антенн принимаемые ими сигналы различаются по фазе. Разность фаз равен  где λ - длина волны принимаемого сигнала, L - размер базы, θ - угол между нормалью к базе и направлением принимаемого излучения. Недостатком фазового способа пеленгации является то, что фазовый сдвиг сигналов обращается в нуль не только при θ=0°, но также и при других углах рассогласования, соответствующих условию
где λ - длина волны принимаемого сигнала, L - размер базы, θ - угол между нормалью к базе и направлением принимаемого излучения. Недостатком фазового способа пеленгации является то, что фазовый сдвиг сигналов обращается в нуль не только при θ=0°, но также и при других углах рассогласования, соответствующих условию  где n=1, 2,…,
где n=1, 2,…, 
Известен способ устранения неоднозначности определения направления на источник радиоизлучения фазовым пеленгатором со слабонаправленными антеннами [Денисов В.П., Дубинин Д.В. Фазовые пеленгаторы: Монография. Томск: Томский государственный университет управления и радиоэлектроники, 2002. С.11-15]. Для устранения неоднозначности измерений, связанную с гармоническими изменениями набега фазы принимаемого сигнала слабонаправленными антеннами, применяют дополнительно еще один фазовый пеленгатор с меньшей базой, который грубо позволяет измерять пеленг на источник излучения (ИИ). Недостатком способа является необходимость дополнительного оборудования, что критично для маленьких беспилотных носителей.
Наиболее близким по сущности и достигаемому результату (прототипом) является способ определения направления на источник излучения фазовым пеленгатором на квадрокоптере [Патент РФ №2792039, опубл. 16.03.2023, Бюл. 8]. Способ определения направления на ИИ в одной плоскости, например, в азимутальной, заключается в приеме сигнала источника излучения в одной плоскости двумя ненаправленными антеннами, установленными на квадрокоптере симметрично его строительной оси на расстоянии, именуемой базой, равном половине длины волны принимаемого сигнала, переводе квадрокоптера в режим зависания при обнаружении сигналов источника излучения, перемножении принятых антеннами сигналов в умножителе и определении истинного или противоположного пеленга на источник излучения по максимальному уровню сигнала с выхода умножителя, вращении квадрокоптера вокруг своей оси до достижения ближайшего к максимальному нулевого значения сигнала на выходе умножителя, выполнении прямолинейного передвижения квадрокоптера в плоскости пеленгации в направлении, перпендикулярном базе, и измерении значения сигнала на выходе умножителя, селекции истинного направления на источник излучения от противоположного по убыванию сигнала на выходе умножителя.
Недостатками способа являются невозможность однозначного определения фазовым пеленгатором направления на источник излучения с длиной волны меньше половины базы.
Техническим результатом изобретения является устранение неоднозначности определения фазовым пеленгатором направления на источник излучения, связанную с гармоническими изменениями набега фазы принимаемого сигнала, за счет последовательного суммирования сигналов с выхода умножителя пеленгатора в результате его поворота на 360 градусов с запоминанием значений соответствующих углов поворота и результатов суммирования, определения середины участка с наибольшим ростом/убыванием последовательно на интервалах 120° градусов, где количество интервалов равно полному повороту носителя вокруг своей оси разделенное на фиксированный шаг поворота.
Указанный результат достигается тем, что в известном способе определения направления на источник излучения фазовым пеленгатором на квадрокоптере, при котором:
принимают сигнал источника излучения в одной плоскости двумя ненаправленными антеннами, установленными на квадрокоптере симметрично его строительной оси на расстоянии, именуемой базой,
переводят квадрокоптер в режим зависания при обнаружении сигналов источника излучения,
перемножают принятые антеннами сигналы в умножителе и определяют истинный или противоположный ему пеленг на источник излучения по максимальному уровню сигнала с выхода умножителя,
вращают квадрокоптер вокруг своей оси до достижения ближайшего к максимальному нулевого значения сигнала на выходе умножителя,
выполняют прямолинейное передвижение квадрокоптера в плоскости пеленгации в направлении, перпендикулярном базе, и измеряют значения сигнала на выходе умножителя,
осуществляют селекцию истинного направления на источник излучения от противоположного по убыванию сигнала на выходе умножителя,
согласно изобретению
при вращении пеленгатора с фиксированным шагом Δθ, равным точности поворота пеленгатора вокруг своей оси, запоминают значения сигнала на выходе умножителя и соответствующие им углы относительно положения пеленгатора до начала вращения,
находят значения функции  где ƒ(i) - значение сигнала на выходе умножителя пеленгатора на i шаге измерения, I=1…2⋅π/Δθ - текущий шаг измерения, и запоминают их,
где ƒ(i) - значение сигнала на выходе умножителя пеленгатора на i шаге измерения, I=1…2⋅π/Δθ - текущий шаг измерения, и запоминают их,
после выполнения пеленгатором полного оборота вокруг своей оси по полученным значениям функции F(I) последовательно на интервале π/3 определяют значения углов, удовлетворяющие условию

где  K=1…(2⋅π - π/3)/Δθ - начальное значение рассматриваемого интервала, М - j-й аргумент функции, при котором выполняется условие,
K=1…(2⋅π - π/3)/Δθ - начальное значение рассматриваемого интервала, М - j-й аргумент функции, при котором выполняется условие,
определяют истинный или противоположный ему угол на источник излучения по формуле θ=9К+(θМ-θK)/2-π/2,
поворачивают пеленгатор до найденного угла θ и дополнительно до ближайшего к нему нулевого значения сигнала на выходе умножителя,
перемещают пеленгатор в направлении, перпендикулярном базе,
осуществляют селекцию истинного направления на источник излучения от противоположного по убыванию сигнала на выходе умножителя.
Сущность изобретения поясняется фигурой.
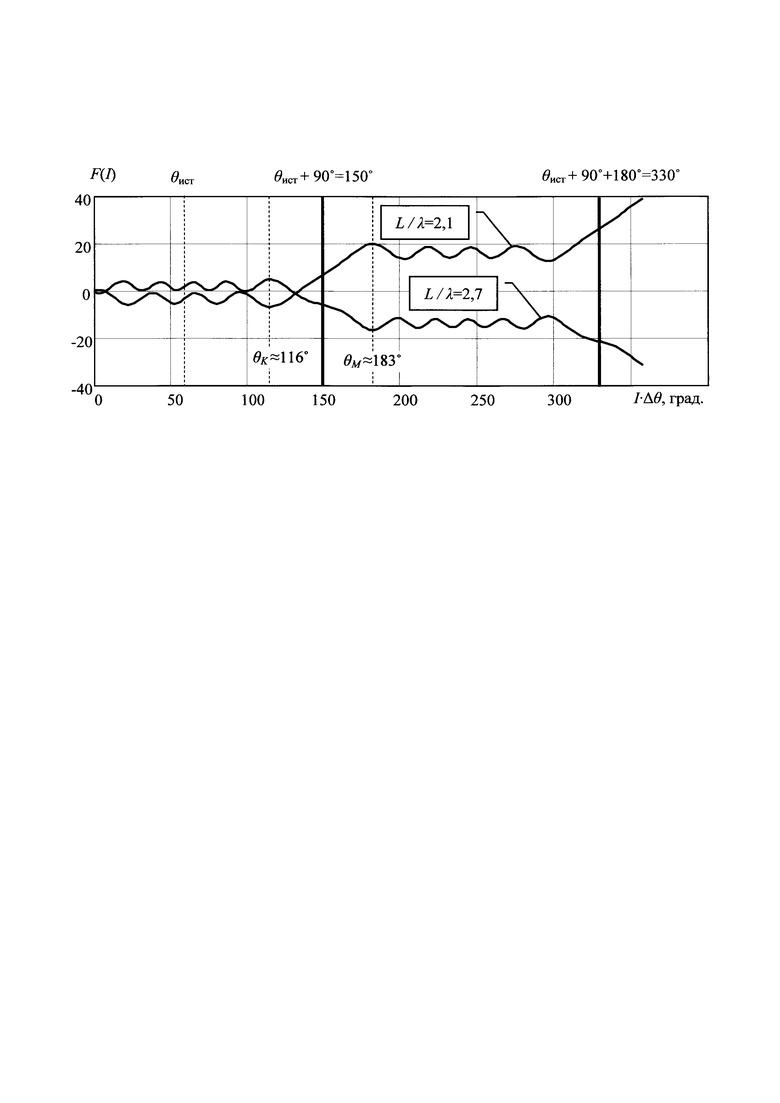
На фигуре представлены сглаженные функции F(T) для различных отношений (L/λ), истинное значение угла на источник излучения θист, а также значения углов θК и θМ, при которых выполняется условие

Значения функции  получены при следующих значениях характеристик: шаг между измерениями Δθ=2°, начальный угол между перпендикуляром к базе и источником излучения θист=60°, отношение размера базы к длине волны L/λ=2,1 и 2,7.
получены при следующих значениях характеристик: шаг между измерениями Δθ=2°, начальный угол между перпендикуляром к базе и источником излучения θист=60°, отношение размера базы к длине волны L/λ=2,1 и 2,7.
Из представленных зависимостей видно, что независимо от отношения L/λ на интервале 360° (полный оборот пеленгатора вокруг своей оси) имеются два участка с наибольшим ростом/убыванием функций F(I). Причем середина левого участка минус 90° соответствует значению истинного угла на источник излучения θисх, а середина правого участка - противоположному ему углу θист+180°. Минимальное (максимальное) значение функции F(I), соответствующее углу θK, и максимальное (минимальное) значение функции F(T), соответствующее углу θM, на интервале π/3 для отношения L/λ=2,1 (2,7) позволяют определить угол θист или противоположный ему θист+180° по формуле

Применение условия (1) и формулы (2) не позволяют определить, где истинное направление на ИИ, а где противоположное ему, но позволяют устранить неоднозначности измерений, связанные с гармоническими изменениями набега фазы принимаемого сигнала слабонаправленными антеннами.
Селекцию истинного направления на ИИ от противоположного ему осуществляется с использованием способа-прототипа, то есть:
разворотом пеленгатора до найденного угла θ, при этом перпендикуляр к базе будет соответствовать направлению в сторону ИИ или противоположную ему;
доворотом до ближайшего угла, при котором на выходе умножителя будет нулевое значение сигнала;
прямолинейным передвижением пеленгатора в плоскости пеленгации в направлении, перпендикулярном базе;
измерением значения сигнала на выходе умножителя пеленгатора.
Если сигнал на выходе умножителя при перемещении убывает, то пеленгатор движется в направлении источника излучения, а если растет - в противоположную сторону.
Способ определения направления на источник излучения фазовым пеленгатором реализуется следующим образом.
1) После обнаружения ИИ с шагом Δθ, равным точности поворота пеленгатора вокруг своей оси, выполняют постепенный разворот пеленгатора на 360° и измерения сигнала на выходе умножителя ƒ(i), на входы которого поступают сигналы с выходов приемных антенн пеленгатора.
При выполнении разворота дополнительно запоминают значения углов и сигналов на выходе умножителя, соответствующие каждому шагу измерения, а также находят значения функции  и запоминают их.
и запоминают их.
2) После разворота пеленгатора по полученным значениям функции F(I) последовательно на интервале π/3 определяют значения углов θK и θM, удовлетворяющие условию (1), и угол θ по формуле (2). Значение угла θ соответствует истинному или противоположному ему направлению на ИИ.
3) Поворачивают пеленгатор до найденного угла θ и дополнительно до ближайшего к нему нулевого значения сигнала на выходе умножителя и перемещают пеленгатор в направлении, перпендикулярном базе.
Если при передвижении пеленгатора сигнал на выходе умножителя пеленгатора начинает убывать, то принимают решение, что это истинное направление на ИИ, а если сигнал растет - противоположное ему.
Способ может быть реализован с использованием известных устройств: ненаправленных антенн в виде полуволнового вибратора, фазового пеленгатора на базе SDR приемника типа RTL2&32, на выходе которого принятый сигнал будет в цифровом виде, микроконтроллера типа PIC16F62X, в котором можно реализовать соответствующие вычисления и запоминания сигналов. Угловое положение пеленгатора и угол на ИИ могут быть определены серийно установленными на носителях компасом, бесплатформенной инерциальной навигационной системой, GPS приемником.
Таким образом, предлагаемый способ позволяет устранить неоднозначность определения фазовым пеленгатором направления на источник излучения, связанную с гармоническими изменениями набега фазы принимаемого сигнала, за счет последовательного суммирования сигналов с выхода умножителя пеленгатора в результате его поворота на 360 градусов с запоминанием значений соответствующих углов поворота и результатов суммирования, определения середины участка с наибольшим ростом/убыванием последовательно на интервалах 120° градусов, где количество интервалов равно полному повороту пеленгатора вокруг своей оси разделенному на фиксированный шаг поворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КВАДРОКОПТЕРЕ | 2021 |
|
RU2792039C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КОПТЕРЕ | 2024 |
|
RU2841365C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2423719C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505832C2 |
| ПЕЛЕНГАТОР | 1990 |
|
RU2006872C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2321014C2 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419805C1 |
| КРУГОВОЙ ПЕЛЕНГАТОР (ВАРИАНТЫ) | 2006 |
|
RU2319162C9 |
Изобретение относится к области радионавигации и может быть использовано для однозначного определения углового положения в азимутальной плоскости источника излучения с заранее неизвестной длиной волны фазовым пеленгатором, размещенным на квадрокоптере. Техническим результатом является устранение неоднозначности определения фазовым пеленгатором направления на источник излучения, связанной с гармоническими изменениями набега фазы принимаемого сигнала. Заявленный способ включает прием сигнала источника излучения в одной плоскости двумя ненаправленными антеннами, установленными симметрично строительной оси носителя на расстоянии базы, перевод носителя в режим зависания при обнаружении сигналов источника излучения, определение истинного или противоположного ему пеленга на источник излучения по максимальному уровню перемноженных сигналов с выхода умножителя, вращение пеленгатора вокруг своей оси до достижения ближайшего к максимальному нулевого значения сигнала на выходе умножителя, выполнение прямолинейного передвижения пеленгатора в плоскости пеленгации в направлении, перпендикулярном базе, и измерение значения сигнала на выходе умножителя. При этом за счет последовательного суммирования сигналов с выхода умножителя пеленгатора, в результате его поворота на 360 градусов, с запоминанием значений соответствующих углов поворота и результатов суммирования, определения середины участка с наибольшим ростом/убыванием последовательно на интервалах 120 градусов, где количество интервалов равно полному повороту пеленгатора вокруг своей оси, разделенному на фиксированный шаг поворота, осуществляют селекцию истинного направления на источник излучения от противоположного по убыванию сигнала на выходе умножителя. 1 ил.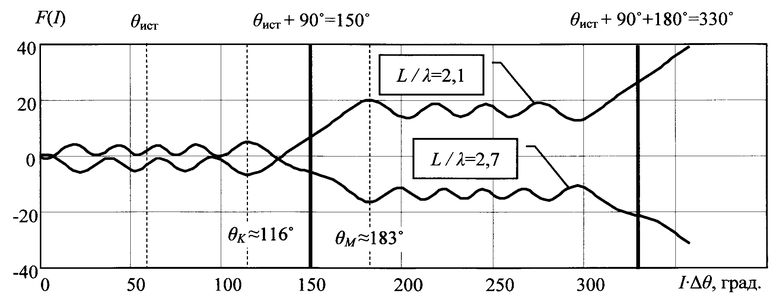
Способ определения направления на источник излучения фазовым пеленгатором, основанный на приеме сигнала источника излучения в одной плоскости двумя ненаправленными антеннами, установленными на носителе симметрично его строительной оси на расстоянии, именуемой базой, равном половине длины волны принимаемого сигнала, переводе носителя в режим зависания при обнаружении сигналов источника излучения, перемножении принятых антеннами сигналов в умножителе и определении истинного или противоположного ему пеленга на источник излучения по максимальному уровню сигнала с выхода умножителя, вращении пеленгатора вокруг своей оси до достижения ближайшего к максимальному нулевого значения сигнала на выходе умножителя и определении соответствующего ему углового положения пеленгатора относительно нормали к базе, выполнении прямолинейного передвижения пеленгатора в плоскости пеленгации в направлении, перпендикулярном базе, и измерении значения сигнала на выходе умножителя, селекции истинного направления на источник излучения от противоположного по убыванию сигнала на выходе умножителя, отличающийся тем, что при вращении пеленгатора с фиксированным шагом Δθ, равным точности поворота пеленгатора вокруг своей оси, запоминают значения сигнала на выходе умножителя и соответствующие им углы относительно положения пеленгатора до начала вращения, находят значения функции  где ƒ(i) - значение сигнала на выходе умножителя пеленгатора на i шаге измерения, 1=1…2⋅π/Δθ - текущий шаг измерения, и запоминают их, после выполнения пеленгатором полного оборота вокруг своей оси по полученным значениям функции F(I) последовательно на интервале π/3 определяют значения углов, удовлетворяющие условию
где ƒ(i) - значение сигнала на выходе умножителя пеленгатора на i шаге измерения, 1=1…2⋅π/Δθ - текущий шаг измерения, и запоминают их, после выполнения пеленгатором полного оборота вокруг своей оси по полученным значениям функции F(I) последовательно на интервале π/3 определяют значения углов, удовлетворяющие условию

где  K=1…(2⋅π - π/3)/Δθ - начальное значение рассматриваемого интервала, М - j-й аргумент функции, при котором выполняется условие, определяют истинный или противоположный ему угол на источник излучения по формуле θ=θK+(θM - θK)/2 - π/2, поворачивают пеленгатор до найденного угла θ и дополнительно до ближайшего к нему нулевого значения сигнала на выходе умножителя, перемещают пеленгатор в направлении, перпендикулярном базе, осуществляют селекцию истинного направления на источник излучения от противоположного по убыванию сигнала на выходе умножителя.
K=1…(2⋅π - π/3)/Δθ - начальное значение рассматриваемого интервала, М - j-й аргумент функции, при котором выполняется условие, определяют истинный или противоположный ему угол на источник излучения по формуле θ=θK+(θM - θK)/2 - π/2, поворачивают пеленгатор до найденного угла θ и дополнительно до ближайшего к нему нулевого значения сигнала на выходе умножителя, перемещают пеленгатор в направлении, перпендикулярном базе, осуществляют селекцию истинного направления на источник излучения от противоположного по убыванию сигнала на выходе умножителя.
| Способ амплитудно-фазовой пеленгации системой с вращающимися антаннами | 2020 |
|
RU2750335C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ ПРИ АМПЛИТУДНО-ФАЗОВОЙ ПЕЛЕНГАЦИИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432580C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2020 |
|
RU2739486C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР | 2018 |
|
RU2681203C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК РАДИОИЗЛУЧЕНИЯ И ПЕЛЕНГАТОР | 2010 |
|
RU2434240C1 |
| АЗАРОВ А.В., КАРАВАЕВ М.Н., РОЖКОВ С.С., СЛАВЯНСКИЙ А.О., СМОЛКА К.А | |||
| Синтез малогабаритного фазового пеленгатора авиационного базирования // Труды МАИ | |||
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Устройство для разметки подлежащих сортированию и резанию лесных материалов | 1922 |
|
SU123A1 |
| БЛОК ОХЛАЖДЕНИЯ ИНЖЕКТОРА ДЛЯ УДЕРЖИВАНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ИНЖЕКТОРА | 2011 |
|
RU2503902C1 |
