Изобретение относится к области радионавигации и может быть использовано, например, для однозначного определения углового положения в азимутальной плоскости наземного радиомаяка фазовым пеленгатором, размещенным на квадрокоптере.
При применении фазового метода пеленгации в одной плоскости (одномерного пеленгования) необходимы минимум две антенны, разнесенные на расстояние L, называемое базой. [Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. М.: Сов. радио, 1975. 336 с: ил., стр. 91-93]. Способ основан на том, что за счет разноса антенн принимаемые ими сигналы различаются по фазе. Разность фаз равен  где λ - длина волны принимаемого сигнала, L - размер базы, θ - угол между нормалью к базе и направлением принимаемого излучения. Это дает возможность определить угол в по измеренной величине разности фаз. При этом среднеквадратическая ошибка измерения угла σθ=λ/(2πL⋅cos(θ)⋅q0,5) пропорциональна отношению λ/L), q - отношение сигнал/шум. Недостатком фазового способа пеленгации является то, что фазовый сдвиг сигналов обращается в нуль не только при θ=0°, но также и при других углах рассогласования, соответствующих условию
где λ - длина волны принимаемого сигнала, L - размер базы, θ - угол между нормалью к базе и направлением принимаемого излучения. Это дает возможность определить угол в по измеренной величине разности фаз. При этом среднеквадратическая ошибка измерения угла σθ=λ/(2πL⋅cos(θ)⋅q0,5) пропорциональна отношению λ/L), q - отношение сигнал/шум. Недостатком фазового способа пеленгации является то, что фазовый сдвиг сигналов обращается в нуль не только при θ=0°, но также и при других углах рассогласования, соответствующих условию  где n=1, 2,…,
где n=1, 2,…,  Поэтому при увеличении размера базы L в интересах снижения σθ пеленгационная характеристика получается знакопеременной, обладающей, наряду с основным направлением, многими ложными равносигнальными направлениями.
Поэтому при увеличении размера базы L в интересах снижения σθ пеленгационная характеристика получается знакопеременной, обладающей, наряду с основным направлением, многими ложными равносигнальными направлениями.
Известен способ определения направления на источник радиоизлучения фазовым пеленгатором [Денисов В.П., Дубинин Д.В. Фазовые пеленгаторы: Монография. Томск: Томский государственный университет управления и радиоэлектроники, 2002. С. 10-15]. Для устранения неоднозначности измерений, связанную с гармоническим изменения набега фазы принимаемого сигнала, присущих данному типу пеленгаторов, в работе предложено применять дополнительно еще один фазовый пеленгатор с меньшей базой, который грубо позволяет измерять пеленг на источник излучения (ИИ). Недостатком способа является необходимость дополнительного оборудования, что критично для маленьких беспилотных носителей, и отсутствие возможности исключения ложного направления на зеркальный ИИ.
Наиболее близким по сущности и достигаемому результату (прототипом) является способ определения направления на ИИ фазовым пеленгатором [Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М.: «Сов. радио», 1970. С. 7-9, 20-22]. Способ определения направления на ИИ в одной плоскости, например, в азимутальной, заключается в:
приеме радиосигналов от ИИ на две направленные антенны, разнесенные в данной плоскости на расстояние, называемое базой, равное примерно половине длины волны принимаемых сигналов;
определении длины волны принимаемых сигналов;
сдвиге фазы сигнала в одном из приемных каналов на π/2 для обеспечения равенства нулю выходного сигнала при совмещении равносигнального направления с направлением на ИИ;
перемножении в умножителе сигналов со сдвигом и без сдвига фазы;
повороте антенн до тех пор, пока сигнал на выходе умножителя не будет равен нулю, что соответствует равносигнальному направлению на источник излучения.
Применение направленных антенн позволяет исключить ложное определение направление на зеркальный источник излучения с противоположной тыльной стороны.
Недостатками способа являются трудности, возникающие при сдвиге фазы сигнала в одном из приемных каналов на π/2, что требует точного знания длины волны принимаемого сигнала, а также необходимость применения тяжелых объемных направленных антенн, имеющих узкий сектор одновременного обзора примерно 60°.
Техническим результатом изобретения является возможность размещения фазового пеленгатора на квадрокоптере за счет отказа от фазового сдвига в одном из приемных каналов, точного определения длины волны принимаемого излучения и направленных антенн, что позволяет уменьшить массу, габариты и стоимость фазового пеленгатора, а также расширение сектора одновременного наблюдения до 360° за счет применения ненаправленных антенн.
Указанный результат достигается тем, что в известном способе определения направления на источник излучения фазовым пеленгатором, при котором:
принимают сигнал источника излучения в одной плоскости двумя антеннами, установленными на носителе симметрично его строительной оси на расстоянии, именуемой базой, равном примерно половине длины волны принимаемого сигнала,
перемножают принятые сигналы в умножителе и определяют пеленг на источник излучения по уровню сигнала с выхода умножителя,
согласно изобретению антенны выполняют ненаправленными, а носителем является квадрокоптер,
при наличии сигнала на выходе умножителя квадрокоптер переводят в режим зависания, после чего вращают его вокруг своей оси и измеряют уровень сигнала на выходе умножителя,
определяют ближайшее к максимальному нулевое значение сигнала на выходе умножителя и соответствующее ему угловое положение квадрокоптера относительно нормали к базе и дополнительно поворачивают до него квадрокоптер,
выполняют прямолинейное передвижение квадрокоптера в плоскости пеленгации в направлении, перпендикулярном базе, и измеряют значение сигнала на выходе умножителя,
если сигнал убывает, то принимают решение, что источник излучения находится в направлении движения и угол, соответствующий ближайшему максимальному значению на выходе умножителя, будет являться его истинным пеленгом,
в противном случае, если сигнал возрастает, то принимают решение, что источник излучения расположен в противоположном направлении и угол, соответствующий ближайшему максимальному значению на выходе умножителя, +180 град, будет являться его истинным пеленгом,
для уточнения направления на источник излучения квадрокоптер переводят в режим зависания и поворачивают вокруг своей оси в направлении ближайшего максимального значения на выходе умножителя до его достижения.
Сущность изобретения заключается в следующем.
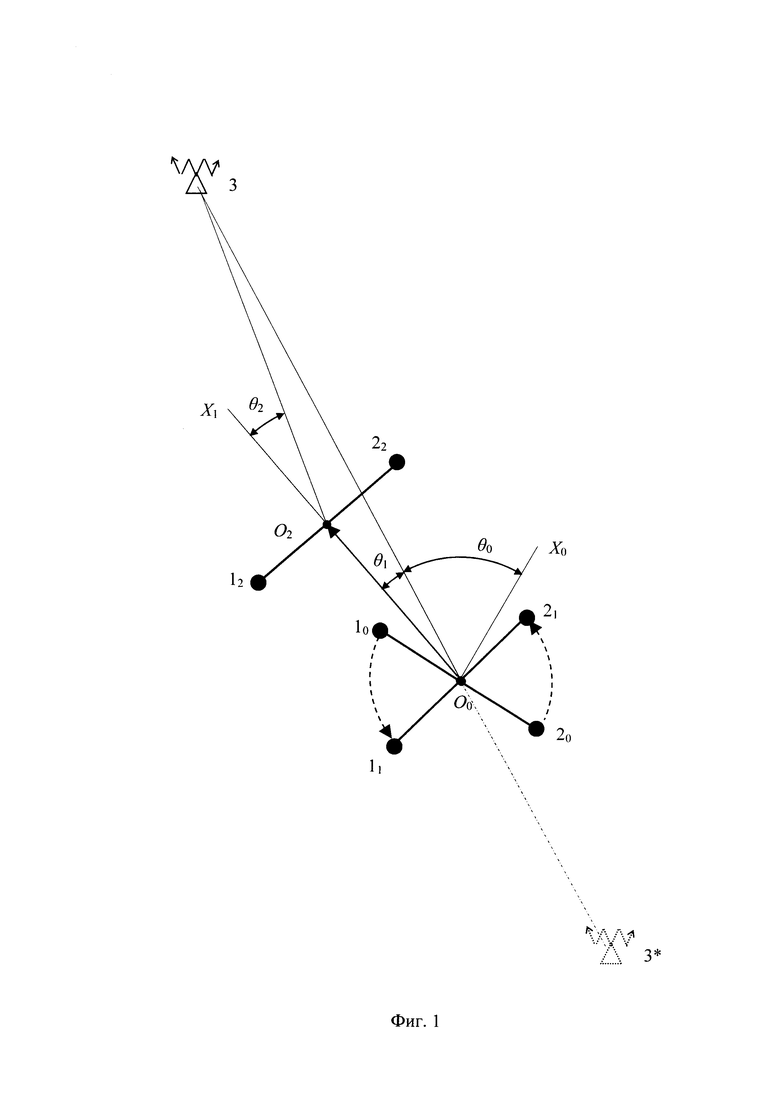
На фиг. 1 представлена схема реализации предлагаемого способа определения направления на ИИ.
На фигурах обозначены:
10, 20, [О0, Х0) - местоположения левой, правой антенн и оси отсчета углов в горизонтальной плоскости при приеме сигнала от ИИ в начальный момент; 11, 21, [О0, Х0) - местоположения левой, правой антенн и оси отсчета углов после поворота, при котором сигнал на выходе умножителя будет равен нулю, в промежуточный момент; 12, 22, [O2, X1) - местоположения левой, правой антенн и оси отсчета углов после прямолинейного передвижения пеленгатора в конечный момент; 3, 3* - местоположение истинного источника излучения и ложного; θ0, θ1, θ2- углы в горизонтальной плоскости между нормалью к базе и направлением на ИИ в начальный, промежуточный и конечный моменты определения направления, соответственно.
Применение легких ненаправленных антенн и отказ от устройства фазового сдвига позволяют осуществлять с использованием фазового метода пеленгацию источников излучения с борта квадрокоптера. Однако при этом необходимо применять дополнительные меры для селекции ложных направлений на ИИ. Под истинным направлением понимается направление, в котором действительно находится источник излучения 3, а под ложным - зеркальное направление на ИИ 3*. Ложное направление возникает из-за применения ненаправленных антенн.
При приеме пеленгатором сигнала от ИИ в начальный момент квадрокоптер переводят в режим зависания и путем вращения вокруг своей оси (соответственно и антенн) в горизонтальной плоскости по максимальному сигналу на выходе умножителя пеленгатора, что соответствует равносигнальному направлению на ИИ 3 (3*), определяют истинное (или ложное) направление на ИИ. Далее продолжают поворот квадрокоптера до тех пор, пока сигнал на выходе умножителя не будет равен нулю, что соответствует на фиг. 1 промежуточному моменту. В интересах определения того, что в данном секторе находится ИИ 3 или 3*, осуществляют прямолинейное передвижение квадрокоптера в горизонтальной плоскости по оси отсчета углов [О0, X1). Так как в случае передвижения в сторону сектора, в которой находится истинный ИИ 3, значение угла θ начинает увеличиваться (θ2>θ1 см. фиг. 1), а в противоположную сторону - наоборот уменьшаться, что позволяет определить истинное направление на ИИ 3 и исключить ложное 3*.
Оценим, как влияет изменение угла в на значение сигнала на выходе умножителя при прямолинейном передвижении пеленгатора.
Сигналы, принимаемые антеннами 1, 2, можно записать в виде [Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М.: «Сов. радио», 1970. С. 20]:


где Еn1, ω - амплитуда и частота сигнала; Δϕ(θ) - разность фаз принятых антеннами 1, 2 сигналов, зависящий от угла пеленгации θ; j - мнимая единица; t - время.
При использовании фазового детектора, выполняющего операции умножения и усреднения входных сигналов, сигнал на его выходе [там же]:

где K - коэффициент передачи фазового детектора, Re[…] - реальная часть от выражения в скобках, λ - длина волны принятого сигнала, L - размер базы.
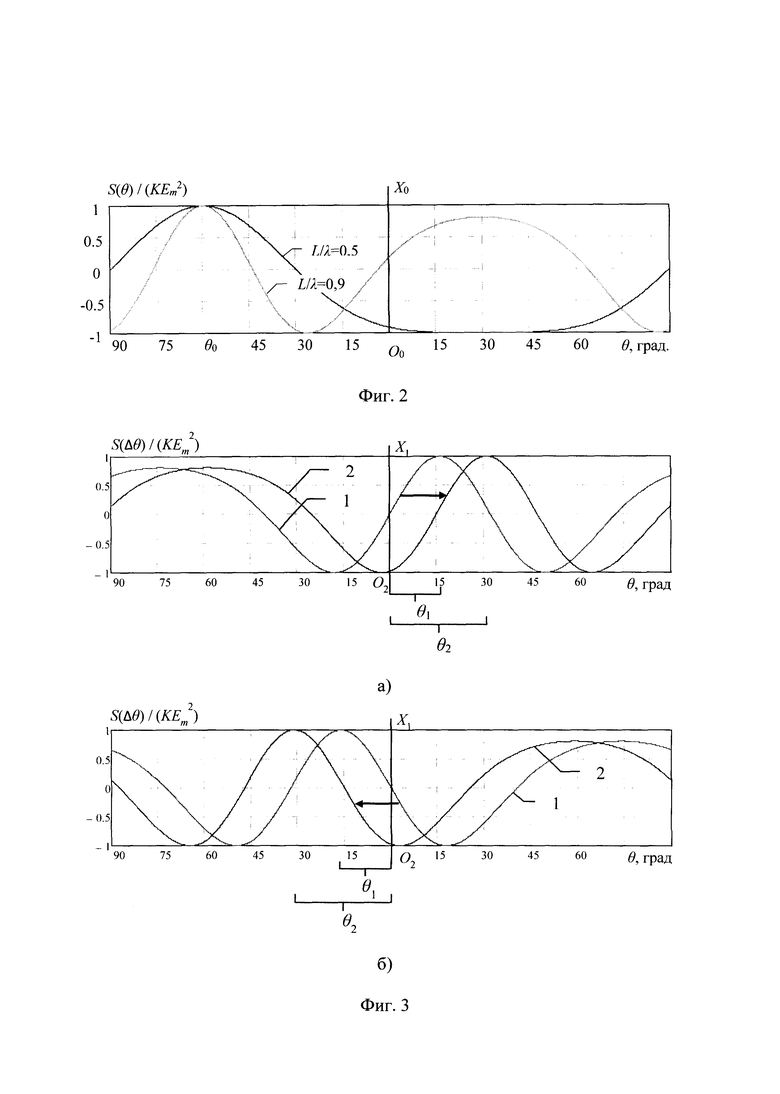
Нормированная зависимость (1) для различных отношений (L/λ), когда угол на ИИ θ0=60°, что соответствует начальному моменту на фиг. 1, представлена на фиг. 2, в соответствии с которой, чтобы сигнал на выходе фазового детектора был равен нулю после ближайшего максимального значения, квадрокоптер необходимо повернуть влево вокруг оси на угол примерно 76° при L/λ=0,9 и 90° при L/λ=0,5. Равносигнальное направление на ИИ на фиг. 2 соответствует максимальному значению сигнала на выходе умножителя и равен 60° для ИИ 3 и 240° для ИИ 3* (если продолжить периодическую зависимость влево).
Нормированная зависимость (1) после осуществления поворота на угол 76° для L/λ=0,9, что соответствует промежуточному моменту на фиг. 1, представлена кривой 1 на фиг. 3а). Как сказано выше, в случае передвижения пеленгатора в сторону сектора, в которой находится истинный ИИ 3, значение угла в начинает увеличиваться (θ2>θ1, см. фиг. 1), а в противоположную сторону - наоборот уменьшаться. На фиг. 3а) кривой 2 показано перемещение пеленгационной характеристики при передвижении пеленгатора в соответствии с фиг. 1. На фиг. 3б) показаны зависимости, аналогичные фиг. 3а), для случая, если бы ИИ 3 в начальный момент находился справа от нормали к базе.
Из зависимостей, представленных на фиг. 3, видно, что сигнал на выходе фазового детектора при движении пеленгатора к ИИ 3 будет уменьшаться, а к 3* - увеличиваться, что позволяет отселектировать ложное направление.
В способе-прототипе для обеспечения равенству нулю выходного сигнала при совмещении равносигнального направления с направлением на ИИ предварительно, до подачи сигналов на фазовый детектор, в одном из каналов осуществляют сдвиг фазы (например, фазовращателем) на π/2. В этом случае вместо косинусоидального сигнала на выходе фазового детектора будет синусоидальный. Однако для осуществления сдвига на π/2, необходимо точно измерить длину волны принимаемого излучения и применять сложные, тяжелые, выполненные на волноводах линейные фазовращатели [Самойленко В.И., Ши-шов Ю.А. Управление фазированными антенными решетками. М.: Радио и связь, 1983. 240 с. С. 150-160], что недопустимо для такого носителя, как квадрокоптер, или дорогие малогабаритные цифровые фазовращатели с малым уровнем дискрета сдвига фазы с соответствующей системой управления фазовращателем, что усложняет и повышает стоимость пеленгатора. Так, например, стоимость цифрового 6 битного фазовращателя НМ C647ALP6E, работающего в диапазоне частот 2,5-3,1 ГГц, составляет 7110 руб [https://www.chipdip.ru, обращение 08.07.2021 г.]. Для упрощения устройства пеленгации, снижения его массы и стоимости в предложенном способе исключен фазовый сдвиг сигнала.
В способе-прототипе использовались направленные рупорные антенны с диаграммой направленности ~60°, выполненные из металла, имеющие достаточно большую массу, и посеребренные изнутри во избежание коррозии, что повышает их стоимость. Применение поверхностных плоских антенн в виде напыленного на диэлектрическую подложку металлического слоя позволяет существенно снизить их массу, однако возникают другие трудности, связанные с взаимным влиянием излучателей [Белоцерковский Г.Б. Основы радиотехники и антенны. Ч.П Антенны: Учебник для техникумов. 2-е изд., перераб. и доп.М.: Радио и связь, 1983. 296 с. С. 226-229] и возможностью размещения на квадрокоптере. Для исключения вышеуказанных недостатков в способе предложено использовать дешевые ненаправленные полуволновые вибраторы, масса которых не превышает единиц грамм в сантиметровом диапазоне длин волн, разнесенные примерно на половину длину волны принимаемого сигнала, что практически исключает из взаимное влияние.
Из вышесказанного следует, что технический результат:
- возможность размещения фазового пеленгатора на квадрокоптере достигается за счет отказа от фазового сдвига в одном из приемных каналов, точного определения длины волны принимаемого излучения и направленных антенн, что позволяет уменьшить массу, габариты и стоимость фазового пеленгатора;
- расширение сектора одновременного наблюдения до 360° обеспечивается за счет применения ненаправленных антенн в фазовом пеленгаторе.
Способ определения направления на источник излучения фазовым пеленгатором на квадрокоптере может быть реализован с использованием известных устройств: ненаправленных антенн в виде полуволнового вибратора, SDR приемника типа RTL2832, на выходе которого принятый сигнал будет в цифровом виде, микроконтроллера типа PIC16F62X, в котором можно реализовать операции умножения сигналов и вычисления угла прихода сигнала от источника излучения. Угловое положение квадрокоптера и угол на ИИ могут быть определены серийно установленными на квадрокоптер компасом и бесплатформенной инерциальной навигационной системой.
Таким образом, предлагаемый способ определения направления на источник излучения фазовым пеленгатором позволяет реализовать его на квадрокоптере за счет снижения массы, габаритов и стоимости пеленгатора, а также расширить сектор одновременного наблюдения до 360°.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ | 2023 |
|
RU2812273C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КОПТЕРЕ | 2024 |
|
RU2841365C1 |
| ПЕЛЕНГАТОР | 1990 |
|
RU2006872C1 |
| ПЕЛЕНГАТОР | 2001 |
|
RU2190235C1 |
| СПОСОБ ПЕЛЕНГАЦИИ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2321015C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2450283C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2282872C1 |
| Фазовый пеленгатор | 2018 |
|
RU2684321C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И МНОГОКАНАЛЬНЫЙ ПЕЛЕНГАТОР | 1999 |
|
RU2144200C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2012 |
|
RU2519593C2 |
Изобретение относится к области радионавигации и может быть использовано для однозначного определения углового положения в азимутальной плоскости наземного радиомаяка фазовым пеленгатором, размещенным на квадрокоптере. Техническим результатом является обеспечение возможности определения направления на источник излучения фазовым пеленгатором с квадрокоптера за счет снижения массы и габаритов пеленгатора, а также расширение сектора одновременного наблюдения до 360°. Заявленный способ основан на приеме сигнала источника излучения в одной плоскости двумя антеннами, установленными на носителе симметрично его строительной оси на расстоянии базы, перемножении принятых сигналов в умножителе и определении пеленга на источник излучения по уровню сигнала с выхода умножителя. Дополнительно антенны выполнены ненаправленными, а носителем является квадрокоптер. При наличии сигнала на выходе умножителя квадрокоптер переводят в режим зависания, вращают вокруг своей оси и измеряют уровень сигнала на выходе умножителя. Определяют ближайшее к максимальному нулевое значение сигнала на выходе умножителя и соответствующее ему угловое положение квадрокоптера относительно нормали к базе и дополнительно поворачивают до него квадрокоптер. Выполняют прямолинейное передвижение квадрокоптера в плоскости пеленгации в направлении, перпендикулярном базе, и измеряют значение сигнала на выходе умножителя. Если сигнал убывает, то считают, что источник излучения находится в направлении движения и угол, соответствующий ближайшему максимальному значению на выходе умножителя, будет являться его истинным пеленгом, в противном случае принимают решение, что источник излучения расположен в противоположном направлении и угол, соответствующий ближайшему максимальному значению на выходе умножителя, +180°, будет являться его истинным пеленгом. 3 ил.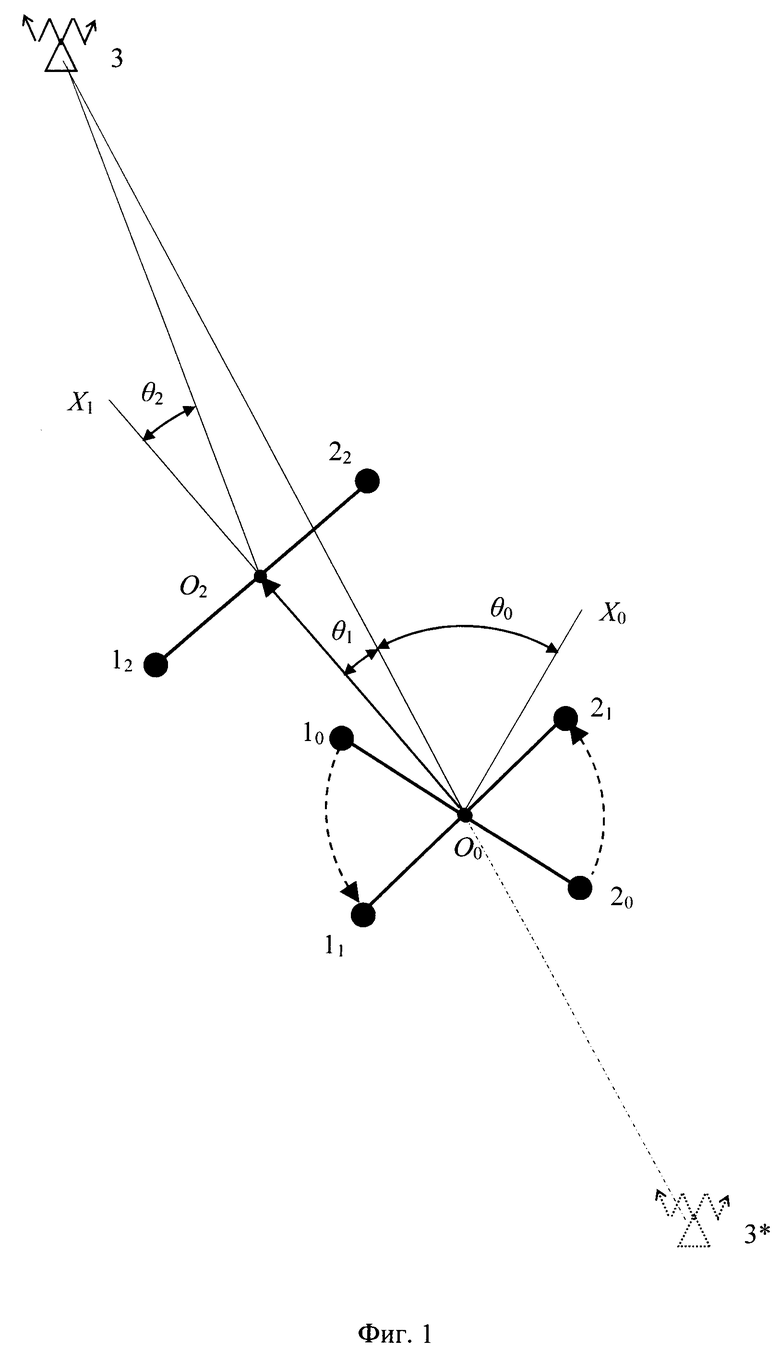
Способ определения направления на источник излучения фазовым пеленгатором на квадрокоптере, основанный на приеме сигнала источника излучения в одной плоскости двумя антеннами, установленными на квадрокоптере симметрично его строительной оси на расстоянии, именуемом базой, равном половине длины волны принимаемого сигнала, перемножении принятых сигналов в умножителе и определении пеленга на источник излучения по уровню сигнала с выхода умножителя, отличающийся тем, что антенны выполнены ненаправленными, при наличии сигнала на выходе умножителя квадрокоптер переводят в режим зависания, после чего вращают его вокруг своей оси и измеряют уровень сигнала на выходе умножителя, определяют ближайшее к максимальному нулевое значение сигнала на выходе умножителя и соответствующее ему угловое положение квадрокоптера относительно нормали к базе и дополнительно поворачивают до него квадрокоптер, выполняют прямолинейное передвижение квадрокоптера в плоскости пеленгации в направлении, перпендикулярном базе, и измеряют значение сигнала на выходе умножителя, если сигнал убывает, то принимают решение, что источник излучения находится в направлении движения и угол, соответствующий ближайшему максимальному значению на выходе умножителя, будет являться его истинным пеленгом, в противном случае, если сигнал возрастает, то принимают решение, что источник излучения находится в противоположном направлении и угол, соответствующий ближайшему максимальному значению на выходе умножителя, +180°, будет являться его истинным пеленгом, для уточнения направления на источник излучения квадрокоптер переводят в режим зависания и поворачивают вокруг своей оси в направлении ближайшего максимального значения на выходе умножителя до его достижения.
| Способ амплитудно-фазовой пеленгации системой с вращающимися антаннами | 2020 |
|
RU2750335C1 |
| RU 2015102432 A, 10.08.2016 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ ПРИ АМПЛИТУДНО-ФАЗОВОЙ ПЕЛЕНГАЦИИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432580C1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОСИГНАЛА | 2020 |
|
RU2739486C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК РАДИОИЗЛУЧЕНИЯ И ПЕЛЕНГАТОР | 2010 |
|
RU2434240C1 |
| АШИХМИН А | |||
| В., ВИНОГРАДОВ А | |||
| Д., РЕМБОВСКИЙ А | |||
| М., СЛАДКИХ В | |||
| А | |||
| Способ однопозиционного местоопределения источников радиоизлучения с использованием бортового радиопеленгатора беспилотного летательного аппарата | |||

