Область техники, к которой относится изобретение
Изобретение относится к области устройств для захвата, в частности, устройств для захвата штабелей.
Уровень техники
Известно устройство и способ захвата, формовки и укладки тонких стеклянных панелей (RU2715162C1, опубл. 2020.02.25). Известное решение относится к устройству и способу захвата, формовки и укладки тонких стеклянных панелей. Устройство содержит раму с верхом и низом, который предназначен быть обращенным к стеклянной панели толщиной менее 1 мм и который снабжен множеством захватывающих штифтов, которые расположены по существу параллельно друг другу и направленный на стеклянную панель конец которых снабжен присоской, при этом захватывающие штифты являются подвижными независимо друг от друга вдоль направления их протяженности, чтобы адаптировать расположение присосок к намеченной форме стеклянной панели. Устройство позволяет не только захватывать, переносить и укладывать тонкие стеклянные панели, но и производить их формовку, что расширяет его функциональные возможности.
Однако данное решение, хотя и содержит подпружиненные независимые пальцы, не может быть эффективно использовано для захвата штабелей изделий.
Известен зажим промышленного робота (CN216577961U, опубл. 2022-05-24). В известном решении раскрывается захват промышленного робота, включающий нижнюю пластину и подвижную пластину, нижняя пластина включает в себя: зажимное устройство, включающее приводной узел, прижимную пластину, прижимную воздушную подушку и амортизирующий узел. Угол зажимной пластины можно отрегулировать, настроив регулировочный компонент, чтобы можно было адаптироваться под зажимаемый предмет. Зажимное устройство подходит для захвата предметов различной формы, таких как блоки, круглые трубы и тому подобное. Диапазон применения расширен за счет зажимной воздушной подушки и амортизирующего узла. Исключается повреждение предмета, улучшается надежность захвата предмета сложной формы.
Однако данное решение не может быть эффективно использовано для захвата штабелей изделий, так как оно адаптировано под захват одного объекта.
Известна рука робота (JP2008100323A, 2008-05-01). Известное решение приставляет собой руку робота захватного типа с двумя пальцами, имеющую механизм, предотвращающий падение захватываемого объекта, даже если значение команды на исполнительный механизм для приведения в движение пальцев становится равным нулю. Техническая реализация пальцев робота следующая: каждый палец содержит три фаланги, соединенные друг с другом пластинчатой пружиной. Пальцы покрыты нескользящим упругим материалом со стороны, соприкасающейся с захватываемым объектом. Объект, подлежащий захвату, захватывается за счет линейного движения первой фаланги за счет вращения поворотного вала 9 исполнительного механизма 10. Когда первая фаланга соприкасается с захватываемым объектом, осуществляется деформация первой пластинчатой пружины и второй пластинчатой пружины, что приводит к соприкосновению второй фаланги с захватываемым объектом. Рука заявленного робота может надежно захватывать объект сложной формы за счет напряжения пластинчатых пружин.
В данном решении используются пластинчатые пружины, которые имеют относительно небольшой рабочий диапазон, также это решение адаптировано под захват одного объекта, а не штабелей.
Раскрытие изобретения
В одном аспекте изобретения раскрыто устройство для захвата штабелей, содержащее:
- силовой привод;
- блок захвата;
характеризующееся тем, что
силовой привод выполнен с возможностью управлять блоком захвата так, чтобы зажимать штабель,
- блок захвата содержит два элемента захвата, содержащих множество пальцев,
пальцы представляют собой параллельные пластины, выполненные с возможностью поворота на единой оси на элементе захвата,
каждый палец выполнен подпружиненным.
В дополнительных аспектах раскрыто, что сторона каждого пальца, соприкасающаяся со штабелем, покрыта противоскользящим покрытием; пружины крайних пальцев могут быть выполнены более жесткими; пружины пальцев расположены над осью поворота; пальцы имеют П-образный профиль; пальцы имеют наклон к вертикали от 2 до 10 градусов.
Основной задачей, решаемой заявленным изобретением, является создание устройства захвата штабелей, которое надежно удерживает штабели изделий отличающейся длины.
Сущность изобретения заключается в том, что блок захвата содержит множество пальцев, установленных с возможностью независимого относительно друг друга поворота на общей оси так, что позволяет пальцам независимо захватывать объекты, в частности, изделия, сложенные штабелями. При этом пальцы выполнены подпружиненными, чтобы была возможность зажимать изделия.
Технический результат, достигаемый решением, заключается в повышении надежности захвата и удержания штабеля изделий.
Краткое описание чертежей
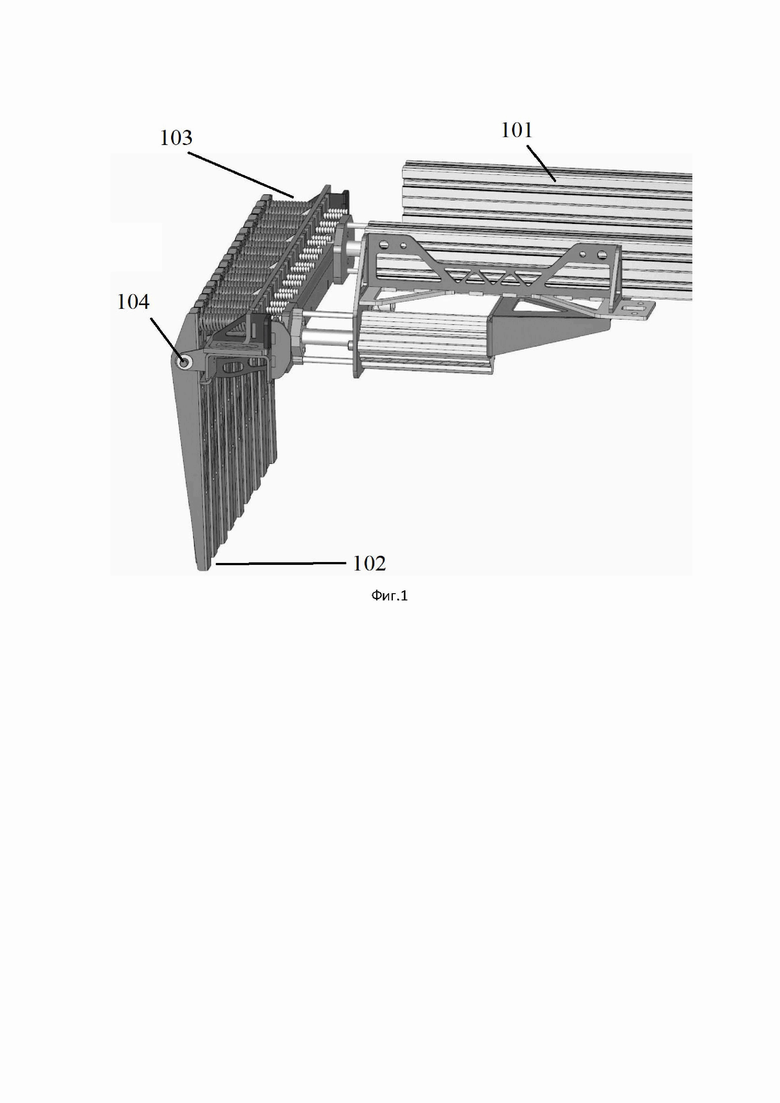
Фиг.1. показывает часть блока захвата с множеством подпружиненных пальцев.
Осуществление изобретения
Часть блока захвата показана на фиг.1, на которой:
101 – каркас;
102 – пальцы;
103 – пружины;
104 – ось поворота.
Все элементы заявленного устройства связаны друг с другом конструктивно и функционально посредством сборочных операций. Устройство изготавливается на заводе-изготовителе. На фиг.1 показана только часть блока захвата, другая часть выполнена симметрично. Блок захвата содержит по меньшей мере каркас 101, установленные на нем пальцы 102, также на нем установлены элементы силового привода. Блок захвата соединен с остальными частями заявленного устройства, что обеспечивает по меньшей мере возможность перемещения блока захвата относительно захватываемого штабеля.
Каркас 101 содержит вытянутую горизонтальную раму, на обоих концах которой установлены пальцы 102 для захвата изделий. Каркас 101 может иметь разное исполнение, адаптированное под захват и перемещение тех или иных изделий. Часть каркаса 101, на которой установлены пальцы 102 (рама), должна иметь такую длину и ширину, чтобы иметь возможность охватывать штабель изделий, то есть она должна быть длиннее и шире штабеля.
Под штабелем в данном описании понимается по меньшей мере один ряд однородных изделий, например, труб, рулонов, бруса. На практике эти изделия имеют несколько отличающуюся длину, что не позволяет их захватывать одним плоским захватом. Так как такой захват зажмет лишь самое длинное изделие.
Для решения этой проблемы было предложено создать захват с множеством пальцев, каждый из которых может адаптироваться под длину изделия, которое он захватывает. Таким образом, по меньшей мере один палец захватывает одно изделие ряда, соседние пальцы захватывают соседние изделия.
Штабель может содержать два и более рядов изделий, которые также могут быть захвачены заявленным решением. В пространство между пальцами двух рук (для простоты множество пальцев на одной стороне называется здесь рукой) можно поместить штабель высотой примерно в длину пальцев. Поскольку в верхних рядах могут оказаться более длинные изделия, которые будут препятствовать захвату нижних рядов в заявленном решении предусмотрены дополнительные варианты, преодолевающие эти проблемы.
Предложенный каркас 101 содержит горизонтальную раму с подвижной частью, на которой закреплены пальцы 102. Подвижная часть выполнена с возможностью двигаться вдоль рамы, чтобы увеличивать и уменьшать пространство между пальцами 102. Перед захватом изделий с помощью силового привода (не показан на фиг.1) увеличивают расстояние между пальцами 102, а для захвата изделий уменьшают это расстояние.
Силовой привод может представлять собой сервопривод, шаговый двигатель, гидравлический силовой привод и т.д. Подвижная часть может перемещаться вдоль рамы на направляющих любого типа, что не относится к сущности заявленного решения.
Пальцы 102 представляют собой вытянутые пластины с ребрами жесткости по обоим длинным краям пластины, то есть имеют П-образный профиль, предпочтительно высота ребер уменьшается к концам пальцев. Ребра жесткости нужны для обеспечения достаточного усилия сжатия и надежного захвата изделий. Предпочтительно ось 104, на которой поворачиваются пальцы, расположена в верхней части пальцев, что позволяет надежно захватывать штабель изделий с разной длинной. То есть при прочих равных условиях, чем ближе ось 104 поворота к верхнему краю пальцев, тем большая разница в длинах захватываемых изделий допускается.
В верхней части пальцев (над осью 104 поворота) установлены пружины 103, причем у каждого пальца 102 имеется своя независимая пружина 103. Эти пружины 103 позволяют каждому пальцу 102 независимо зажимать изделия в штабеле. Предпочтительно располагать пружины 103 в самой верхней части пальцев 102, чтобы они работали на сжатие, так как работа на растяжение способствует отсоединению пружин 103 от пальцев 102 или каркаса 101, что может вызывать выход соответствующих пальцев из строя.
Параметры пальцев 102 выбираются исходя из параметров захватываемых изделий. Чем больше вес изделий, тем с большей нагрузкой должны справляться пальцы 102, то есть должен быть выбран соответствующий материал, определена достаточная толщина, наложены ограничения на длину пальцев 102 и т.д. Чем больше разница в длинах захватываемых изделий, тем больше должна быть длина пальцев 102. Специалист в данной области техники без приложения творческих усилий сможет выбрать материал, длину, толщину пальцев 102 и т.д., чтобы обеспечить надежную работу заявленного устройства.
Количество пальцев 102 выбирается исходя из длины захватываемого изделия, его формы, требований к силе захвата. Чем больше пальцев 102 используется, тем лучше адаптация под форму отдельного изделия в штабеле. Предпочтительно, чтобы на одно изделие приходилось по меньшей мере три пальца, чтобы обеспечить надежный захват за счет адаптации к возможным неровностям торца захватываемого изделия.
Форма и параметры пальцев 102 могут варьироваться в зависимости от параметров захватываемого объекта: пальцы 102 могут быть равномерной ширины, сужающиеся, расширяющиеся, могут быть выгнутыми или прямыми, могут содержать шипы, выемки, перпендикулярные пальцам выступы и т.д.
Каркас 101 содержит часть, которая закреплена на полу, и часть, к которой прикреплены пальцы. Особенности каркаса 101 не раскрываются здесь подробно, так как это не относится к сущности решения. Каркас 101 может содержать средства для перемещения захваченного штабеля, но это также не относится к сущности заявленного решения.
Каркас 101 содержит силовой привод, который разводит пальцы блока захвата перед непосредственно захватом и сводит пальцы в процессе захвата. Блок захвата содержит множество пальцев с элементами крепления пальцев к раме. Когда пальцы сводятся (приближаются друг к другу), то какие-то из них соприкасаются с изделиями в штабеле раньше, какие-то позже. Благодаря пружинам 103 после того, как первые пальцы уже зажали изделия, другие пальцы все еще продолжают сводиться, пока не захватят изделия, которые находятся между ними.
Существуют ограничения возможностей захвата сильно отличающихся по длине изделий, однако на практике изделия в одном штабеле отличаются по длине не более чем на 5%, такое различие заявленная конструкция устройства захвата может скомпенсировать благодаря правильному выбору длин пальцев 102.
Описание работы устройства
Устройство для захвата штабелей управляется оператором вручную или работает в автоматизированном или автоматическом режиме на основании сигналов блока управления, который анализирует данные, поступающие от датчиков.
Когда штабель изделий уложен в заданное место, устройство для захвата перемещает каркас 101 в область над штабелем, разводит пальцы 102 на расстояние больше максимальной длины изделий в штабеле. Затем каркас 101 опускается на уровень необходимый для захвата штабеля пальцами 102, пальцы 102 сводят до момента захвата всех охваченных изделий и поднимают штабель.
Момент завершения захвата штабеля может контролироваться визуально оператором или системой компьютерного зрения. В другом варианте осуществления может использоваться система тензодатчиков на каждом пальце. Как только на каждом тензодатчике давление превысило пороговое значение, захват прекращается и начинается подъем штабеля.
В другом варианте контролируется максимальное значение на любом из тензодатчиков, как только на каком-то из тензодатчиков превышен максимальный порог, захват прекращается. Может использоваться комбинация предложенных вариантов либо комбинация предложенных и других известных из уровня техники вариантов контроля момента завершения захвата.
Перемещение захваченного штабеля осуществляется в пределах рабочей зоны устройства для захвата штабелей. Оно может загружать штабели на конвейер, в контейнер и т.п.
Вариант 1 осуществления
В одном варианте осуществления сторона каждого пальца 102, соприкасающаяся со штабелем, покрыта противоскользящим покрытием, например, силиконом, резиной, ребристым или ошипованным материалом.
В некоторых вариантах пальцы 102 содержат резиновые пневматические подушки, которые позволяют лучше адаптироваться пальцам 102 под форму охватываемого изделия и обеспечить равномерное сжатие изделий.
Вариант 2 осуществления
В одном варианте осуществления пружины крайних пальцев выполнены более жесткими. Это позволяет более надежно захватить крайние изделия в штабеле, что повышает надежность захвата и перемещения штабеля, так как на крайние элементы приходится повышенная нагрузка, и вероятность того, что они выпадут при перемещении выше.
Вариант 3 осуществления
В одном варианте осуществления пальцы имеют наклон к вертикали от 2 до 10 градусов, то есть нижние концы пальцев 102 двух рук находятся ближе друг к другу по сравнению с верхними концами. Это позволяет более надежно захватить изделия, так как при одном и том же усилии захвата из вертикальных пальцев легче выскользнуть чем из наклоненных, также такое исполнение лучше захватывает штабель, в котором изделия верхнего ряда длиннее изделий нижнего ряда.
При этом при углах больше 10 градусов повышается вероятность, что один из концов захваченного изделия сместится вверх, из-за этого второй конец выскользнет из захвата и все изделие выпадет.
Варианты осуществления не ограничиваются описанными здесь вариантами осуществления, специалисту в области техники на основе информации, изложенной в описании, и знаний уровня техники станут очевидны и другие варианты осуществления изобретения, не выходящие за пределы сущности и объема данного изобретения.
Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Под функциональной связью элементов следует понимать связь, обеспечивающую корректное взаимодействие этих элементов друг с другом и реализацию той или иной функциональности элементов. Частными примерами функциональной связи может быть связь с возможностью обмена информацией, связь с возможностью передачи электрического тока, связь с возможностью передачи механического движения, связь с возможностью передачи света, звука, электромагнитных или механических колебаний и т.д. Конкретный вид функциональной связи определяется характером взаимодействия упомянутых элементов, и, если не указано иное, обеспечивается широко известными средствами, используя широко известные в технике принципы.
Способы, раскрытые здесь, содержат один или несколько этапов или действий для достижения описанного способа. Этапы и/или действия способа могут заменять друг друга, не выходя за пределы объема формулы изобретения. Другими словами, если не определен конкретный порядок этапов или действий, порядок и/или использование конкретных этапов и/или действий может изменяться, не выходя за пределы объема формулы изобретения.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать более широкое изобретение, и что данное изобретение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку различные другие модификации могут быть очевидны специалистам в соответствующей области.
Признаки, упомянутые в различных зависимых пунктах формулы, а также реализации, раскрытые в различных частях описания могут быть скомбинированы с достижением полезных эффектов, даже если возможность такого комбинирования не раскрыта явно.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ СОЕДИНЕНИЯ МНОГОКОМПОНЕНТНЫХ АППЛИКАТОРОВ ДЛЯ ТАМПОНОВ | 2021 |
|
RU2809575C1 |
| УСТРОЙСТВО ДЛЯ ОБВЯЗКИ ИЗДЕЛИЙ НА ПАЛЛЕТЕ | 2022 |
|
RU2793019C1 |
| УСТРОЙСТВО И СПОСОБ РАЗЪЕДИНЕНИЯ И ТРАНСПОРТИРОВКИ ПОДЛОЖЕК | 2007 |
|
RU2380305C2 |
| АППАРАТ ДЛЯ ЗАХВАТА И УДЕРЖИВАНИЯ ДИАГНОСТИЧЕСКИХ КАССЕТ | 2012 |
|
RU2628659C2 |
| Интервенционная автоматизированная операционная система | 2022 |
|
RU2801157C1 |
| СПОСОБ И УСТРОЙСТВО МАНИПУЛИРОВАНИЯ ШИНАМИ | 2016 |
|
RU2735514C2 |
| ИСКУССТВЕННЫЙ ПАЛЕЦ | 2014 |
|
RU2667624C2 |
| ЛИНИЯ ДЛЯ РЕЗКИ ТРУБ И СПОСОБ РЕЗКИ ТРУБ | 2021 |
|
RU2801136C1 |
| КИСТЬ, ПРЕДНАЗНАЧЕННАЯ ДЛЯ АНТРОПОМОРФНОГО РОБОТА, С УЛУЧШЕННЫМИ ПАЛЬЦАМИ | 2015 |
|
RU2643753C1 |
| Схват манипулятора | 1985 |
|
SU1379106A1 |
Изобретение относится к области устройств для захвата, в частности устройств для захвата штабелей. Устройство для захвата штабелей содержит силовой привод и блок захвата. При этом силовой привод выполнен с возможностью управлять блоком захвата так, чтобы зажимать штабель. Блок захвата содержит два элемента захвата, содержащих множество пальцев, которые представляют собой параллельные пластины, выполненные с возможностью поворота на оси на элементе захвата при захвате штабеля. Каждый палец выполнен независимо подпружиненным, а пружины пальцев расположены над упомянутой осью. Технический результат заключается в повышении надежности захвата и удержания штабеля изделий. 5 з.п. ф-лы, 1 ил., 3 пр.
1. Устройство для захвата штабелей, содержащее:
- силовой привод;
- блок захвата;
характеризующееся тем, что
силовой привод выполнен с возможностью управлять блоком захвата так, чтобы зажимать штабель,
блок захвата содержит два элемента захвата, содержащих множество пальцев,
пальцы представляют собой параллельные пластины, выполненные с возможностью поворота на оси на элементе захвата при захвате штабеля,
каждый палец выполнен независимо подпружиненным, а пружины пальцев расположены над упомянутой осью.
2. Устройство по п.1, в котором сторона каждого пальца, соприкасающаяся со штабелем, покрыта противоскользящим покрытием.
3. Устройство по п.1, в котором пружины крайних пальцев выполнены более жесткими.
4. Устройство по п.1, в котором пальцы имеют П-образный профиль.
5. Устройство по п.1, в котором пальцы имеют наклон к вертикали от 2 до 10 градусов.
6. Устройство по п.1, в котором количество пальцев задано таким, чтобы каждое изделие в штабеле захватывалось не менее чем тремя пальцами.
| ЗАХВАТНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДЪЕМА ШТАБЕЛЕЙ КИРПИЧЕЙ И ТОМУ ПОДОБНЫХ МАТЕРИАЛОВ | 1935 |
|
SU47059A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2034767C1 |
| Манипулятор | 1984 |
|
SU1227463A1 |
| Грейфер для длинномерных материалов | 1981 |
|
SU1044584A1 |
| CN 105600676 A, 25.05.2016. | |||
