Изобретение относится к грузозахватным многопозиционным устройствам ,для манипулирования группой хрупких изделий, например отпрессованных ферритовых колец, в условиях повышенной запыленности.
Цель изобретения - повьшение эксплуатационной надежности достигается подвижным расположением в основании шарнирной стойки и связями корпуса захвата с основанием посредством винтов с пружинами и направляющими.
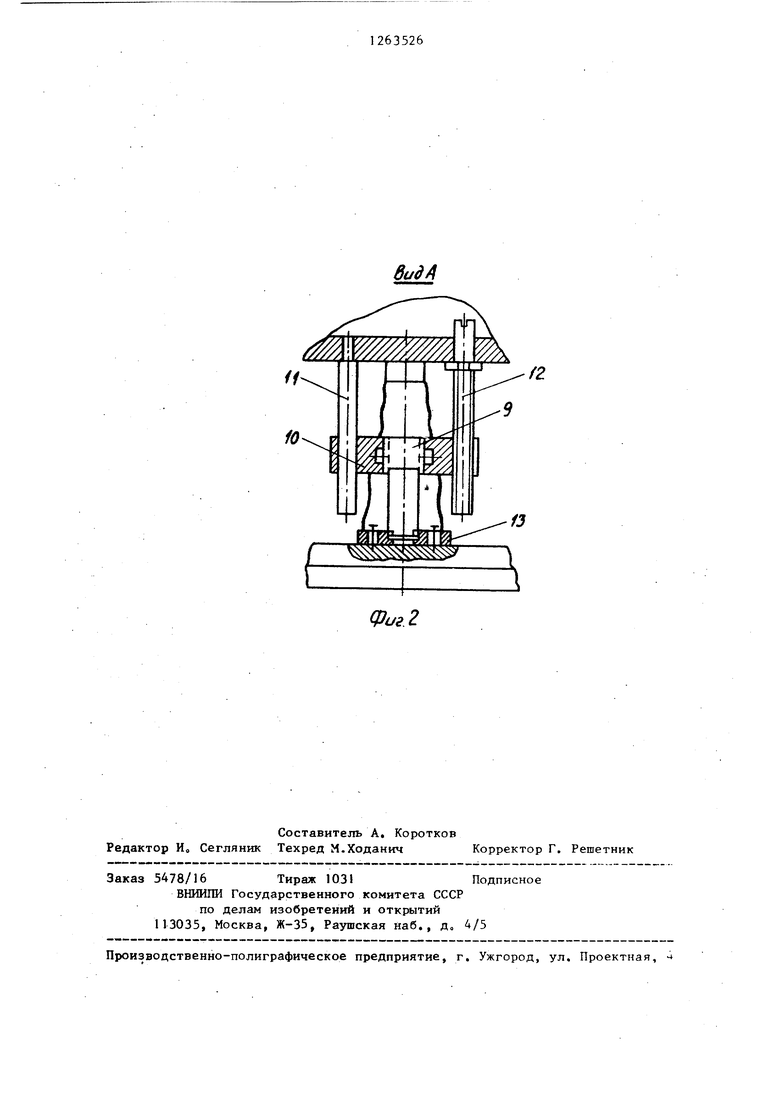
На фиг. 1 представлен вакуумный захват; на фиг, 2 - вид А на фиг. 1 Вакуумный захват содержит основание 1, подвижную относительно основания через втулку 2 шарнирную стойку 3, на нижнем шарнирном конце которой закреплен корпус 4, В корпусе 4 расположены эластичные присосы 5, вакуумная захватная камера 6 с фильтром 7. Плоские пружины 8 равнорасположены относительно шарнирной стойки 3 и закреплены на роликах 9 ползунов 10, перемещающихся по направляющим 11 от винта 12, установленным на основании I, Свободные концы пружин 8 опираются на направляющие 13, закрепленные на корпусе 4 „
В основание 1 закреплены бесконтактный торцовой датчик 14 и устройт ство контроля уровня вакуума 15, представляющее собой диафрагменную камеру 16, рабочая полость которой соединена с вакуумной магистралью и рабочим пространством вакуумной камеры 6 трубопроводом 17.
Эластичная диафрагма 18, выполнен ная, например, из резины,и установленная внутри камеры 16, перемещает подпружиненную металлическую пластину 19, управляющую бесконтактным-тор . цовым датчиком 20, встроенным в кор63526 2 пусе 21 устройства 15. В верхней ; части основания 1 установлен электромагнитный клапан 22.
5 Вакуумный захват работает следующим образом.
Захват перемещается вниз приводом промьшшенного робота. При контакте эластичных присосов 5 с изделиями 23,
О сформированными в слой, присосы 5 самоустанавливаются и поджимаются к изделиям 23 до плотного контакта с ними за счет шарнирной стойки 3 и плоских пружин 8. Далее начинается
5 перемещение основания 1 относительно корпуса 4, а пружины 8 деформируются и не препятствуют движению.
При определенном сближении корпуса 4 и бесконтактного торцового дат20 чика 14 выдается сигнал промышленному роботу на прекращение опускания и на подключение захвата к вакууму через клапан 22.
При достижении необходимого уров 5 ня разряжения в камере 6 трубопровода 17 и рабочей полости камеры 16 срабатывает устройство контроля уровня вакуума 15. Эластичная диафрагма 8 перемещает подпружиненную пл7асти30 ну 19 вниз на расстояние, зависимое от уровня разряжения, а торцовый датчик 20 выдает сигнал при необходимости удаления пластинки 19, соответствующий уровню разряжения, обес35 печивающему надежный захват изделий, и подает сигнал на включение привода промьщ1ленного робота. Захват начинает подниматься, и корпус 4 с захватными изделиями 23 перемещается 40 роботом в другую позицию.
Регулировка усилия поджатия плоских пружин 8 к корпусу 4 производится вращением винта 12 и перемещением ползунов 10 с роликами 9 по направ45 ляющей lie
ВидА
Фиг 2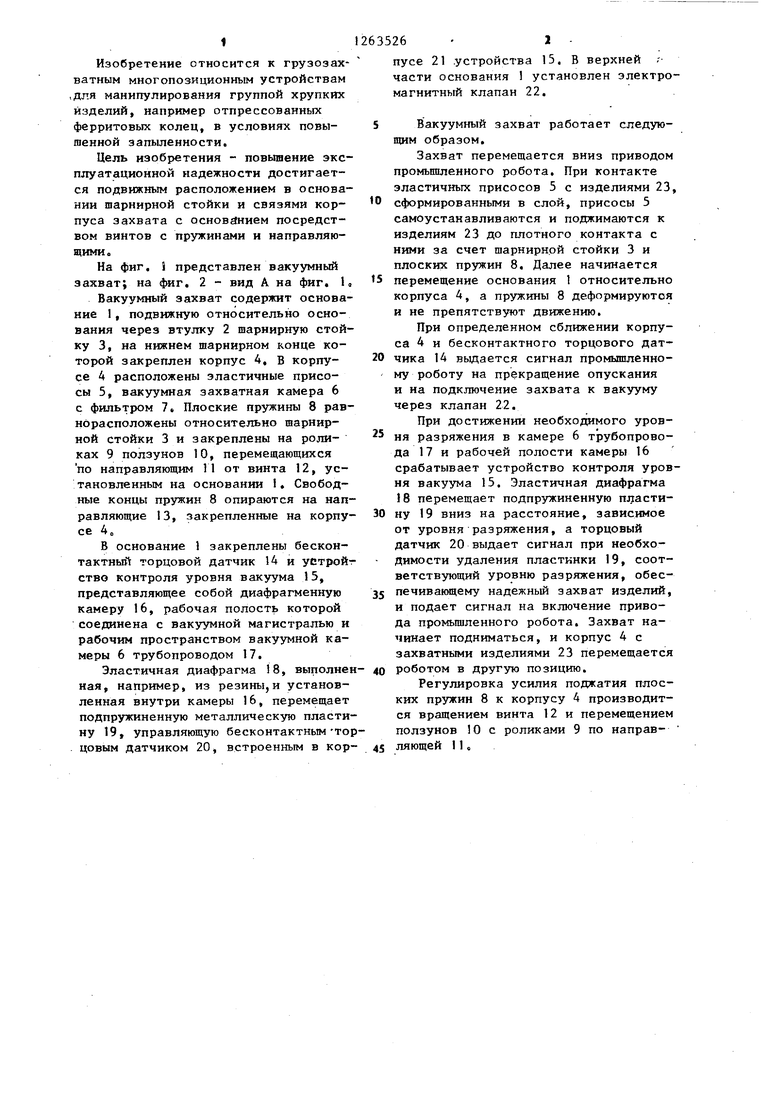
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки штучных изделий в тару | 1986 |
|
SU1359201A1 |
| Вакуумный схват | 1989 |
|
SU1763174A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
| Устройство для укладки в тару штучных изделий | 1973 |
|
SU526546A1 |
| Вакуумное захватное устройство | 1979 |
|
SU846480A1 |
| Вакуумное захватное устройство | 1984 |
|
SU1187985A1 |
| Вакуумное грузозахватное устройство | 1986 |
|
SU1373667A1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО МИКРОРОБОТА | 2005 |
|
RU2281197C1 |
| Захватное устройство | 1986 |
|
SU1400876A1 |
ВАКУУМНЫЙ ЗАХВАТ, содержащий основание, на котором на шарнирной стойке закреплен корпус с выполненными в нем отверстиями, соединяющими рабочее пространство вакуумной захватной камеры через фильтр с вакуумной магистралью и устройство контроля уровня вакуума, отличающийся тем, что, с целью расширения технологических возможностей, шарнирная стойка подвижно расположена в основании, снабженном направляющими и винтами с установленными на них ползунами, соединено ными с корпусом захвата посредством плоских пружин, равнорасположенных ел относительно шарнирной стойки, а к рабочей плоскости вакуумной захватС ной камеры подключено устройство контроля уровня вакуума.
| Вакуумный захват | 1979 |
|
SU839968A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для формирования сигналов суммарной и разностной частот | 1986 |
|
SU1450095A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Перегружатель листов стекла | 1981 |
|
SU1021659A1 |
| Вайнсон А | |||
| А | |||
| и Андреев А | |||
| Ф, Крановые грузозахватные устройства | |||
| Справочник, М.; Машиностроение, 1982, 4, 12, стр | |||
| Упругая металлическая шина для велосипедных колес | 1921 |
|
SU235A1 |
| Крутильно-намоточный аппарат | 1922 |
|
SU232A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
