Изобретение относится к классу мехатронных изделий со встроенными электродвигателем, волновым редуктором, датчиками и может быть использовано в робототехнике общепромышленного и специального назначения.
Известен электродвигатель со встроенным редуктором [патент РФ №2027283]. Он содержит подвижную и неподвижную части корпуса, встроенные бесконтактный электродвигатель постоянного тока, редуктор, роторы датчиков на входном и выходном валах, электрические схемы управления двигателем, электрические кабели с разъемами, подшипники, крепежные изделия.
Недостатком электродвигателя со встроенным редуктором является то, что предложенные конструктивные решения не обеспечивают возможность работы в агрессивных средах и не обеспечивают возможность механической дезактивации с удалением внешнего поверхностного слоя без нарушения коррозионностойки изделия; предложенные комплектующие изделия не относятся к классу радиационно-стойких и электродвигатель невозможно широкого использовать для создания многозвенных роботов различной конфигурации.
В качестве прототипа выбран электромеханический модуль, патент на полезную модель РФ №118483 от 10 января 2012 г., состоящий из подвижного и неподвижного корпусов, содержащий встроенный волновой редуктор и низкооборотный бесконтактный моментный двигатель постоянного тока. Модуль оснащен датчиками скорости двигателя, абсолютного отсчета положения подвижного корпуса, крутящего момента. Модуль оснащен датчиками температуры и нагревательными элементами для поддержания заданной температуры внутри модуля и расширения рабочего температурного диапазона, имеет улучшенные весогабаритные характеристики. Внутри корпуса модуля проложены провода информационного и питающего кабеля. Входной и выходной фланцы модуля с электрическими соединителями расположены на торцевой или боковой поверхностях модуля, что позволяет создавать и переконфигурировать многозвенные робототехнические устройства. Применение встроенного микропроцессорного контроллера дает возможность адаптировать модуль к задачам управления разнообразными робототехническими устройствами на программном уровне, а интегрированный в контроллер CAN интерфейс, реализует распределенную систему управления от центрального компьютера изделием, состоящим из множества электромеханических модулей.
К недостаткам прототипа можно отнести невозможность использования электромеханического модуля в условиях воздействия ионизирующего излучения и агрессивных сред в течение продолжительного времени по причине того, что чувствительный к воздействию ионизирующих излучений блок электроники размещен непосредственно в электромеханическом модуле а использованные комплектующие не относятся к классу радиационно-стойких изделий, кроме того, конструкцией не предусмотрен защитный корпус из коррозионно-стойкой стали, позволяющий выполнять очистку/дезактивацию не только химическими растворами, но и механическим удалением внешнего слоя, и уплотнения, устойчивые к дезактивирующим растворам. Задачами настоящего изобретения являются разработка конструктивно и функционально законченного электромеханического модуля, позволяющего создавать многозвенные робототехнические устройства как общепромышленного, так и специального назначения, предназначенные для выполнения работ, в том числе в условиях воздействия ионизирующего излучения, и обеспечение возможности проведения как жидкостной, так и механической дезактивации с возможностью удаления внешнего слоя. Задача повышения радиационной стойкости электро-механического модуля решается путем применения радиационно-стойких комплектующих изделий и вынесения блока электроники в радиационно-безопасную область за защитный экран, что позволяет использовать в блоке электроники общепромышленные комплектующие, к которым не относятся требования повышенной радиационной стойкости.
Задача обеспечения стойкости к жидкостной и механической дезактивации решается путем введения в конструкцию модуля защитного подвижного корпуса из коррозионностойкой стали и включением между подвижным и неподвижным корпусами уплотнения на основе армированной манжеты, изготовленной из материала, стойкого к дезактивирующим растворам, что обеспечивает сохранение антикоррозионных свойств внешних поверхностей тонкостенного корпуса и электромеханического модуля в целом после проведения жидкостной или механической дезактивации.
Техническим результатом является возможность использования модуля в многозвенных робототехнических устройствах, предназначенных для работы в условиях воздействия ионизирующего излучения и загрязнения радионуклидами с последующей жидкостной и/или механической дезактивацией.
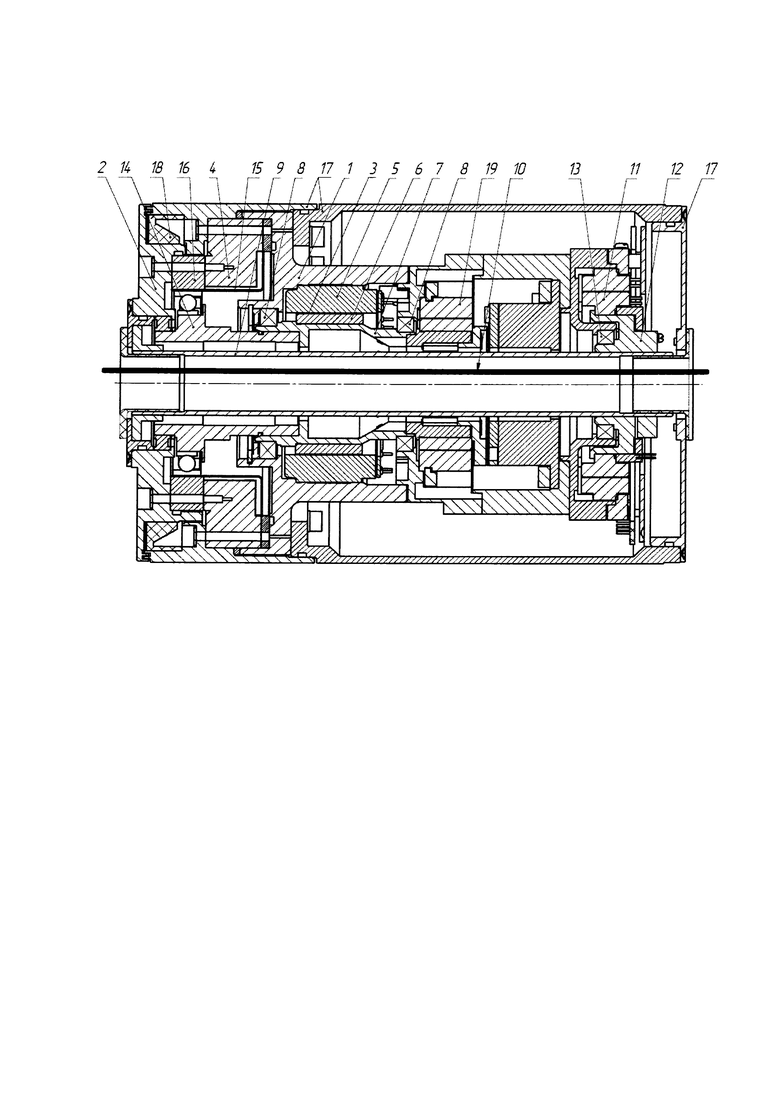
На чертеже изображен электромеханический модуль-шарнир вращательной модификации в разрезе. Модуль состоит из неподвижного корпуса 1, выполненного из алюминиевого сплава и подвижного корпуса 2, выполненного из нержавеющей стали. Подвижный корпус приводится в движение бесконтактным низкооборотным моментным электродвигателем постоянного тока 3 через волновой редуктор чашечного типа со встроенным подшипником с перекрестными роликами 4. Статор двигателя 5 запрессован в неподвижный корпус модуля, ротор двигателя 6 жестко закреплен на полом входном валу редуктора 7 из алюминиевого сплава, вращающемся на двух шарикоподшипниках 8, расположенном соосно полому выходному валу 9 подвижного корпуса, который служит для прокладки информационного и питающего кабеля 10 и соединенного с вращающимся трансформатором 11 через клемное соединение 12, с поддерживающим подшипником 13. Ротор двигателя соединен с генератором 14 волнового редуктора, который деформирует гибкое зубчатое колесо 15, входящее в зацепление с жестким колесом 16 редуктора. Модуль имеет внешний тонкостенный корпус из нержавеющей стали 17, при этом подвижный корпус 2 и тонкостенный корпус из нержавеющей стали 17 образуют лабиринтный зазор, защищающий от попадания абразивной пыли внутрь электромеханического модуля. Между подвижным и неподвижным корпусами установлена армированная манжета 18. Концевые части кабеля жестко прикреплены к корпусам. Кабель работает на скручивание в пределах одного оборота. Информация о положении подвижного корпуса относительно неподвижного снимается с датчика абсолютного отсчета, состоящего из вращающегося трансформатора, статор которого закреплен в неподвижном корпусе модуля, а ротор прикреплен выходному валу подвижного корпуса. В качестве датчика скорости и положения ротора двигателя 19 используется вращающийся трансформатор (резольвер). Предложенный электромеханический модуль работает следующим образом. Угол положения ротора снимается с вращающегося трансформатора, расположенного на валу ротора, а угол поворота подвижного корпуса снимается с вращающегося трансформатора жестко связанного валом подвижного корпуса. В зависимости от полученного задания на поворот подвижного корпуса внешний модуль управления шарниром генерирует трехфазное управляющее напряжение на обмотки статора, в результате чего создается переменное (вращающееся) магнитное поле и ротор двигателя приходит в движение. Вращение ротора поддерживается с заданной скоростью до момента отработки модулем заданного угла поворота подвижного корпуса относительно неподвижного. При обработке дезактивирующими растворами конструкция неподвижного внешнего тонкостенного нержавеющего корпуса, а также подвижный корпус и армированная манжета исключают попадание растворов внутрь электромеханического модуля. При механической дезактивации создаваемые в ее процессе металлические отходы не попадают на армированную манжету за счет лабиринтного зазора между подвижным корпусом и тонкостенным корпусом и таким образом не повреждают ее.
Конкретная реализация электромеханического модуля позволила обеспечить его функционирование в условиях воздействия ионизирующего излучения с величиной интегральной поглощенной дозы до 550 Гр и проведение как жидкостной, так и механической дезактивации с возможностью удаления внешнего слоя на глубину не менее 0,1 мм.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мехатронный модуль для поворота рулевого вала транспортно-технологического средства | 2022 |
|
RU2796264C1 |
| Средство транспортное роботизированное | 2023 |
|
RU2822947C1 |
| Способ определения параметров моментного двигателя постоянного тока | 2022 |
|
RU2796641C1 |
| Двигательная установка подводного аппарата | 2017 |
|
RU2699178C2 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ИНТЕРЦЕПТОРА КРЫЛА САМОЛЕТА | 2012 |
|
RU2522638C2 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| Двухпозиционная электромагнитная муфта | 2022 |
|
RU2817440C1 |
| ВНУТРИТРУБНЫЙ БУКСИРОВЩИК ДЛЯ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2010 |
|
RU2434179C1 |
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
Изобретение относится к области электротехники и может быть использовано в робототехнике общепромышленного и специального назначения. Технический результат – обеспечение возможности применения в агрессивных внешних условиях. Электромеханический модуль состоит из подвижного и неподвижного корпусов, волнового редуктора, низкооборотного бесконтактного моментного двигателя постоянного тока. Модуль оснащен датчиками скорости двигателя, абсолютного отсчета положения подвижного корпуса. Входной и выходной фланцы модуля с электрическими соединителями расположены на торцевых поверхностях модуля. Электромеханический модуль имеет внешний тонкостенный корпус из нержавеющей стали и уплотнение в подвижном соединении на основе армированной манжеты, что позволяет применять модуль в агрессивных средах, а также проводить его очистку и дезактивацию не только химическими растворами, но и механическим удалением внешнего слоя. Внутренние датчики положения ротора и абсолютный датчик положения выходного корпуса, а также моментный двигатель постоянного тока электромеханического модуля имеют исполнение с повышенной радиационной стойкостью, что позволяет применять электромеханический модуль в условиях воздействия ионизирующего излучения. 1 ил.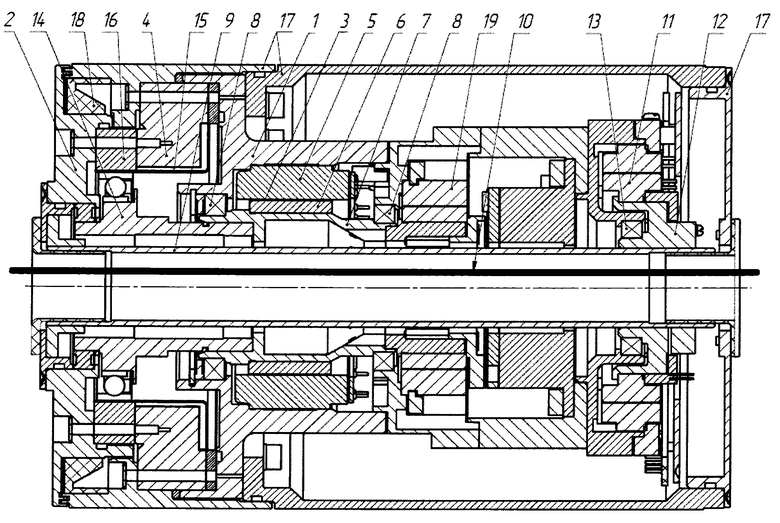
Электромеханический модуль, состоящий из неподвижного и подвижного корпусов, содержащий встроенный волновой редуктор и низкооборотный бесконтактный моментный двигатель постоянного тока, статор двигателя, расположенный в корпусе полого стакана неподвижной части редуктора, ротор двигателя, установленный на полом входном валу редуктора, расположенном коаксиально выходному валу, внутри выходного полого вала проложены провода информационного и питающего кабеля, содержащий входной и выходной фланцы с электрическими разъемами, которые могут быть установлены на торцах, установлены датчики температуры, отличающийся тем, что в электромеханический модуль введен внешний тонкостенный корпус из нержавеющей стали и между подвижным и неподвижным корпусами введено уплотнение на основе лабиринтного зазора и армированной манжеты, стойкой к дезактивирующим растворам, при этом внутренние датчики положения ротора, абсолютный датчик положения выходного корпуса и моментный двигатель постоянного тока имеют исполнение с повышенной радиационной стойкостью, а блок электроники вынесен за пределы модуля.
| Автоматический последовательный многопозиционный штамп | 1958 |
|
SU118483A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ СО ВСТРОЕННЫМ РЕДУКТОРОМ | 1989 |
|
RU2027283C1 |
| 0 |
|
SU144518A1 | |
| МЯЛЬНЫЙ АГРЕГАТ ДЛЯ ПОЛУЧЕНИЯ ЛУБЯНОГО ВОЛОКНА | 0 |
|
SU175604A1 |
| US 7990004 B2, 02.08.2011 | |||
| US 5914548 A1, 22.06.1999. | |||

