Изобретение относится к беспилотным летательным аппаратам для обзора земной/морской поверхности и передачи сигналов, указывающих местоположение наземных/морских объектов [B64C 27/08, B64C 39/04, D64D 41/00, H02K 47/14].
Известен ПРИВЯЗНОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ [RU 169165. Опубликовано: 07.03.2017], характеризующийся наличием корпуса с аккумулятором и аппаратурой управления и наблюдения, одного крыла, установленного на корпусе, и имеющего V-образный профиль, четырех мотор-генераторов с воздушными винтами, установленных на крыле симметрично относительно центра масс летательного аппарата, леера, закрепленного одним концом на корпусе, другим на земле, и удерживающего летательный аппарат на одном месте наподобие «воздушного змея».
Основной технической проблемой прототипа является:
- невозможность беспилотного летательного аппарата находиться в воздушном пространстве продолжительное время без подзарядки;
- сложности при посадке беспилотного летательного аппарата на качающуюся или перемещающуюся поверхность;
- отсутствие специализированного модуля для обеспечения вертикального взлета и вертикальной посадки беспилотного летательного аппарата.
Известен БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ [RU 2380286. Опубликовано: 27.01.2010], содержащее фюзеляж с двухбалочной хвостовой частью, винтомоторную установку толкающего типа, крыло, горизонтальное и вертикальное хвостовое оперение, рулевые машинки и шасси, отличающийся тем, что силовая часть фюзеляжа выполнена в виде металлической фермы и содержит отсек с бортовым радиоэлектронным оборудованием и отсек с основным топливным баком, к силовой части фюзеляжа прикреплены: в носовой части - ферма, содержащая отсек с целевой нагрузкой, в хвостовой части - моторная рама, на которой установлена винтомоторная установка, сверху в средней части - лонжероны крыльев, снизу спереди - переднее шасси, снизу в средней части - основное шасси, лонжероны выполнены трубчатыми с возможностью их использования в качестве дополнительного топливного бака, хвостовые балки выполнены в виде металлических труб и прикреплены к лонжеронам сверху, вертикальное оперение выполнено в виде двух наклонных килей с рулями направления и размещено на концах хвостовых балок, между которыми размещено горизонтальное оперение, выполненное в виде стабилизатора с рулем высоты, обшивка фюзеляжа состоит из переднего обтекателя, основного обтекателя и капота двигателя и выполнена с возможностью доступа через съемные части к блокам целевой нагрузки, блокам бортового радиоэлектронного оборудования и двигателя, а в верхней части основного обтекателя расположен люк, который закрывает отсек с парашютом, находящийся над топливным баком.
Основной технической проблемой прототипа является:
- невозможность беспилотного летательного аппарата находиться в воздушном пространстве продолжительное время без подзарядки;
- сложности при посадке беспилотного летательного аппарата на качающуюся или перемещающуюся поверхность;
- отсутствие специализированного модуля для обеспечения вертикального взлета и вертикальной посадки беспилотного летательного аппарата.
Наиболее близким аналогом является БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ [RU 2492119. Опубликовано: 10.09.2013], содержащий блоки бортовой и радиолокационной аппаратуры (БПЛА), источник питания, включающий синхронный генератор с постоянными магнитами, систему охлаждения, тяговый двигатель, соединенный через синхронный генератор с блоками бортовой аппаратуры БПЛА, и микропроцессорную систему управления, входы которой соединены с выходами блоков бортовой аппаратуры и с выходом синхронного генератора, отличающийся тем, что в него введены дополнительный синхронный генератор с постоянными магнитами, связанный через кинематическое звено с тяговым двигателем, управляемый синхронный выпрямитель, накопитель электроэнергии, стабилизатор напряжения и блок контроля и управления выходного напряжения, подаваемого на блоки радиолокационной аппаратуры, при этом выход дополнительного синхронного генератора соединен через активный синхронный выпрямитель с накопителем энергии, выход которого соединен с входом стабилизатора напряжения, второй вход которого соединен с выходом активного синхронного выпрямителя, выход стабилизатора напряжения соединен со входами блоков радиолокационной аппаратуры, а входы и выходы блока контроля и управления выходным напряжением соединены соответственно с входами и выходами активного синхронного выпрямителя и стабилизатора напряжения.
Основной технической проблемой прототипа является:
- невозможность беспилотного летательного аппарата находиться в воздушном пространстве продолжительное время без подзарядки;
- сложности при посадке беспилотного летательного аппарата на качающуюся или перемещающуюся поверхность;
- отсутствие специализированного модуля для обеспечения вертикального взлета и вертикальной посадки беспилотного летательного аппарата.
Технический результат изобретения заключается в точности позиционирования посадки беспилотного летательного аппарата на движущееся место приземления.
Указанный технический результат достигается тем, что беспилотный летательный аппарат вертикального взлета и посадки, содержащий блоки бортовой и радиолокационной аппаратуры, источник питания, блок управления, отличающийся тем, что на днище беспилотного летательного аппарата смонтирован стыковочный модуль, имеющий форму направленного вниз усеченного конуса, по периметру боковой поверхности усеченного конуса диаметрально его вертикальной оси симметрии выполнена канавка, стыковочный модуль смонтирован в посадочном модуле, сверху в посадочном модуле выполнена ниша, соответствующая по форме и размерам стыковочному модулю с возможностью размещения стыковочного модуля внутри посадочного модуля, в посадочном модуле по периметру радиально смонтированы фиксаторы, каждый из которых содержит подпружиненный стержень, наружный конец которого выполнен формой, соответствующей форме канавки в стыковочном модуле с возможностью его размещения в канавке и фиксации стыковочного модуля, на дне ниши посадочного модуля смонтирована пружина сжатия для амортизации беспилотного летательного аппарата, блок радиолокационной аппаратуры смонтирован в верхней части беспилотного летательного аппарата, блок бортовой аппаратуры, источник питания, блок управления размещены в стыковочном модуле.
Краткое описание чертежей.
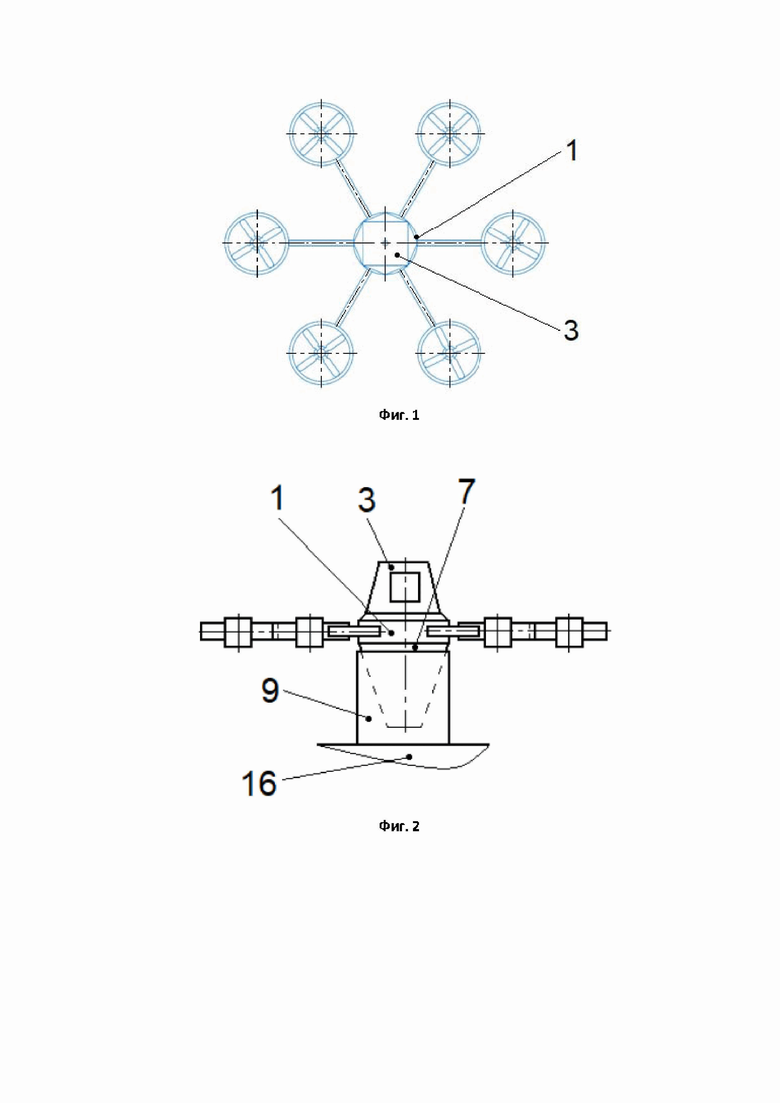
На фиг. 1 представлен беспилотный летательный аппарат, вид сверху.
На фиг. 2 представлен беспилотный летательный аппарат, вид сбоку.
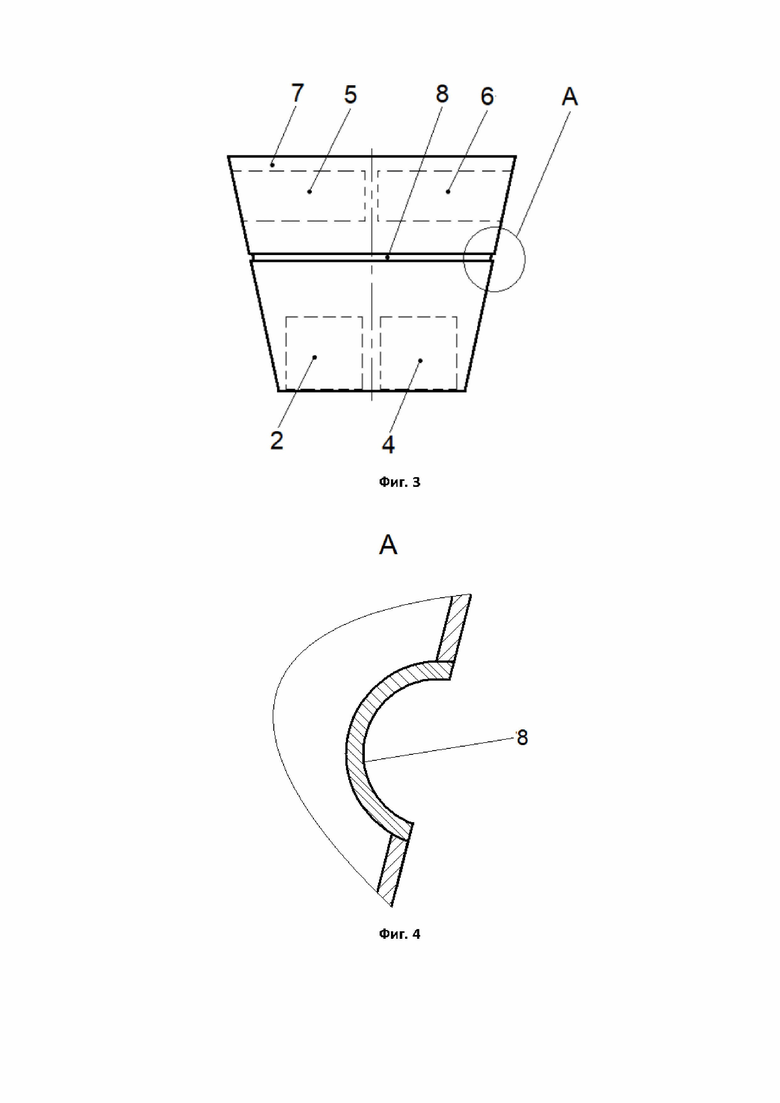
На фиг. 3 представлен стыковочный модуль, вид сбоку.
На фиг. 4 представлено поперечное сечение канавки, вид А.
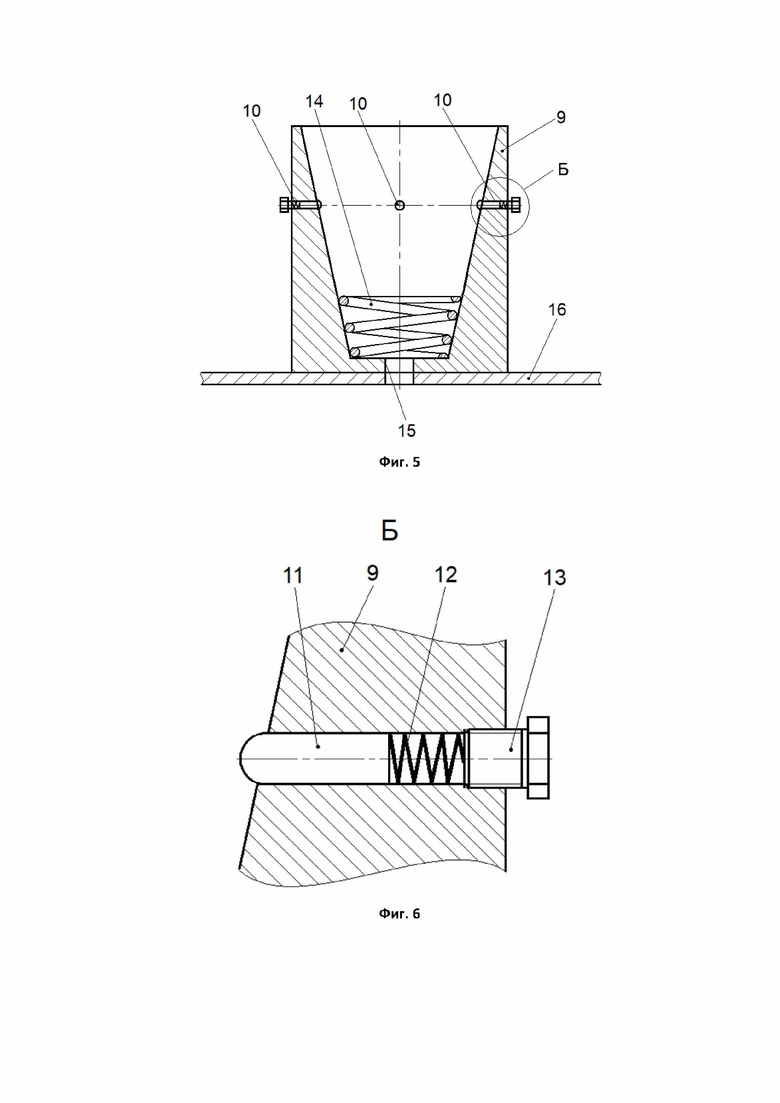
На фиг. 5 представлен продольный разрез посадочного модуля.
На фиг. 6 представлен поперечный разрез фиксатора, вид Б.
На фигурах обозначено: 1 - беспилотный летательный аппарат, 2 - блок бортовой аппаратуры, 3 - блок радиолокационной аппаратуры, 4 - источник питания, 5 - блок управления, 6 - блок аварийной посадки, 7 - стыковочный модуль, 8 - канавка, 9 - посадочный модуль, 10 - фиксатор, 11 - стержень, 12 - пружина, 13 - винт, 14 - пружина сжатия, 15 - отверстие, 16 - твердая поверхность.
Осуществление изобретения.
Беспилотный летательный аппарат 1 вертикального взлета и посадки содержит блоки бортовой 2 и радиолокационной аппаратуры 3, источник питания 4, блок управления 5.
Беспилотный летательный аппарат 1 дополнительно содержит блок аварийной посадки 6.
Блок радиолокационной аппаратуры 3 смонтирован в верхней части беспилотного летательного аппарата 1 вертикального взлета и посадки.
На днище беспилотного летательного аппарата 1 вертикального взлета и посадки смонтирован стыковочный модуль 7. Блок бортовой аппаратуры 2, источник питания 4, блок управления 5 и блок аварийной посадки 6 размещены в стыковочном модуле 7.
Стыковочный модуль 7 имеет форму направленного вниз усеченного конуса. По периметру боковой поверхности усеченного конуса диаметрально его вертикальной оси симметрии выполнена канавка 8.
Стыковочный модуль 7 смонтирован в посадочном модуле 9. Сверху в посадочном модуле 9 выполнена ниша, соответствующая по форме и размерам стыковочному модулю 7 с возможностью размещения стыковочного модуля 7 внутри посадочного модуля 9.
В посадочном модуле 9 по периметру радиально смонтированы фиксаторы 10.
Каждый фиксатор 10 содержит подпружиненный стержень 11, пружину 12 и винт 13. Наружный конец стержня 11 выполнен формой соответствующей форме канавки 8 в стыковочном модуле 7 с возможностью его размещения в канавке 8 и фиксации стыковочного модуля 7.
На дне ниши посадочного модуля 9 смонтирована пружина сжатия 14 для амортизации беспилотного летательного аппарата 1.
На дне ниши посадочного модуля 9 также выполнено отверстие 15 для прокладки через него кабеля и соединения с беспилотным летательным аппаратом 1.
Посадочный модуль 9 жестко смонтирован к твердой поверхности 16 палубы корабля или наземного транспортного средства.
Беспилотный летательный аппарат используют следующим образом.
Беспилотный летательный аппарат 1 вертикального взлета и посадки предназначен для длительного использования. Длительность использования беспилотного летательного аппарата 1 основана на применении стационарного источника питания (на фиг. 1-6 не указан) через постоянно закрепленный кабель.
Входы блока управления 5 соединяют с выходами блока бортовой аппаратуры 2 и с выходом генератора, а также с источником питания 4 посредством кабеля (на фиг. 2, 3, 5 не указано), намотанного на барабан (на фиг. 1-6 не указан), расположенный под твердой поверхностью 16 палубы или транспортного средства.
До начала полета стыковочный модуль 7, смонтированный на днище беспилотного летательного аппарата 1, расположен в нише посадочного модуля 9, а концы стержней 11, идентичные форме канавки 8, расположены в канавке 8 стыковочного модуля 7.
Перед взлетом беспилотного летательного аппарата 1 отворачивают винты 13 из посадочного модуля 7 и извлекают пружины 12 и стержни 11.
В процессе вертикального взлета беспилотного летательного аппарата 1 кабель, жестко закрепленный во внутренней полости стыковочного модуля 7, автоматически разматывается в пределах высоты полета беспилотного летательного аппарата 1.
После взлета беспилотного летательного аппарата 1 стержни 11 вставляют в отверстия, расположенные радиально в посадочном модуле 9, и концами направляют в сторону ниши посадочного модуля 9. Далее вставляют пружины 12 и заворачивают винты 13.
По кабелю также передается электрический ток для подзарядки источник питания 4, расположенного во внутренней полости стыковочного модуля 7.
Блок радиолокационной аппаратуры 3, смонтированный в верхней части беспилотного летательного аппарата 1, передает сигнал на приемный модуль, в дальнейшем преобразуемый в видеосигнал.
По завершении полета и при вертикальной посадке беспилотного летательного аппарата 1 на твердую поверхность 16 палубы корабля или наземного транспортного средства, вращением барабана осуществляют наматывание на него кабеля.
Беспилотный летательный аппарат 1 в воздушном пространстве располагают вертикально над посадочным модулем 9 и продолжают снижение до тех пор, пока усеченный конус стыковочного модуля 7 не войдет во внутреннюю коническую нишу посадочного модуля 9, а концы стержней 11 не войдут в канавку 8 посадочного модуля 9.
После этого двигатели беспилотного летательного аппарата 1 отключают от электрического питания, а также отключают источник питания 4.
Наличие блока радиолокационной аппаратуры 3, смонтированного в верхней части беспилотного летательного аппарата 1, позволяет увеличить радиовидимость цели вследствие наивысшего расположения антенны радиолокационной аппаратуры 3.
Наличие источника питания 4, размещенного в стыковочном модуле 7, и обеспечивающего постоянное электрическое питание двигателей беспилотного летательного аппарата 1, позволяет обеспечить длительность нахождения беспилотного летательного аппарата 1 в воздушном пространстве.
Наличие блока бортовой аппаратуры 2, блока управления 5, размещенных в стыковочном модуле 7, обеспечивает общее управление беспилотным летательным аппаратом 1 и получение обратного сигнала с блока радиолокационной аппаратуры 3 на приемный модуль, в дальнейшем преобразуемый в видеосигнал через кабель.
Наличие устройства для посадки 6, состоящего из стыковочного 7 и посадочного 8 модулей, причем стыковочный модуль 7 смонтирован с нижней частью беспилотного летательного аппарата 1, позволяет повысить эффективность беспилотных летательных аппаратов 1 вертикального взлета и посадки.
Выполнение стыковочного модуля 7 в форме усеченного конуса, а сверху в посадочном модуле 9 выполнена ниша, соответствующая по форме и сопоставимая с размерами нижней части стыковочного модуля 7, также увеличивает не только эффективность посадки беспилотного летательного аппарата 1 и его стыковки с посадочным модулем 9, особенно при их расположении на твердой поверхности 16 палубы корабля или наземного транспортного средства, но и обеспечивает точность позиционирования беспилотного летательного аппарата 1 в условиях линейного горизонтального перемещения корабля или наземного транспортного средства и их качения в вертикальной плоскости и в условиях качения палубы.
Монтаж на дне ниши посадочного модуля 9 вертикально установленной пружины сжатия 14, нижняя сторона которой жестко соединена с посадочным модулем 9, минимизирует ударные воздействия стыковочного модуля 7 о дно ниши посадочного модуля 9, тем самым, увеличивая надежность и безударность процесса стыковки стыковочного модуля 7 с посадочным модулем 9.
Наличие канавки 8 по периметру боковой поверхности усеченного конуса диаметрально его вертикальной оси симметрии, а также радиально смонтированных фиксаторов 10 в посадочном модуле 9, позволяет эффективно зафиксировать беспилотный летательный аппарат 1 на посадочном модуле 9 без непосредственного участия человека, что также повышает эффективность посадки беспилотного летательного аппарата 1.
Кроме того, стыковочным модулем 7 и посадочным модулем 9 возможно оснастить любой беспилотный летательный аппарат вертикального взлета и посадки, что обеспечит универсализацию применяемых беспилотных летательных аппаратов.
Применение беспилотного летательного аппарата 1 позволит обеспечить не только вертикальный взлет/посадку с посадочного модуля 9 и его длительное нахождение в воздушном пространстве, но и повысить эффективность применения беспилотного летательного аппарата 1.
Применение заявленного изобретения обеспечивает точность позиционирования посадки беспилотного летательного аппарата на движущееся место приземления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2024 |
|
RU2837679C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2002 |
|
RU2213024C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2009 |
|
RU2403183C2 |
| БЕЗЭКИПАЖНЫЙ КАТЕР, ОСНАЩЕННЫЙ УСТРОЙСТВОМ ДЛЯ ПОДЗАРЯДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2831111C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (МБЛА ВВП) | 2011 |
|
RU2455198C1 |
| Трансформируемый беспилотный летательный аппарат | 2018 |
|
RU2688506C1 |
Изобретение относится к беспилотным летательным аппаратам. Беспилотный летательный аппарат (1) вертикального взлета и посадки содержит стыковочный модуль (7) в виде направленного вниз усеченного конуса с канавкой и посадочный модуль (9). Посадочный модуль (9) выполнен с возможностью размещения в нем стыковочного модуля (7). В посадочном модуле по периметру смонтированы фиксаторы с подпружиненными стержнями с возможностью их размещения в канавке и фиксации стыковочного модуля. На дне ниши посадочного модуля смонтирована пружина для амортизации. Блок радиолокационной аппаратуры (3) смонтирован в верхней части беспилотного летательного аппарата. Блок бортовой аппаратуры, источник питания, блок управления размещены в стыковочном модуле (7). Обеспечивается точность позиционирования посадки беспилотного летательного аппарата на движущееся место приземления. 6 ил.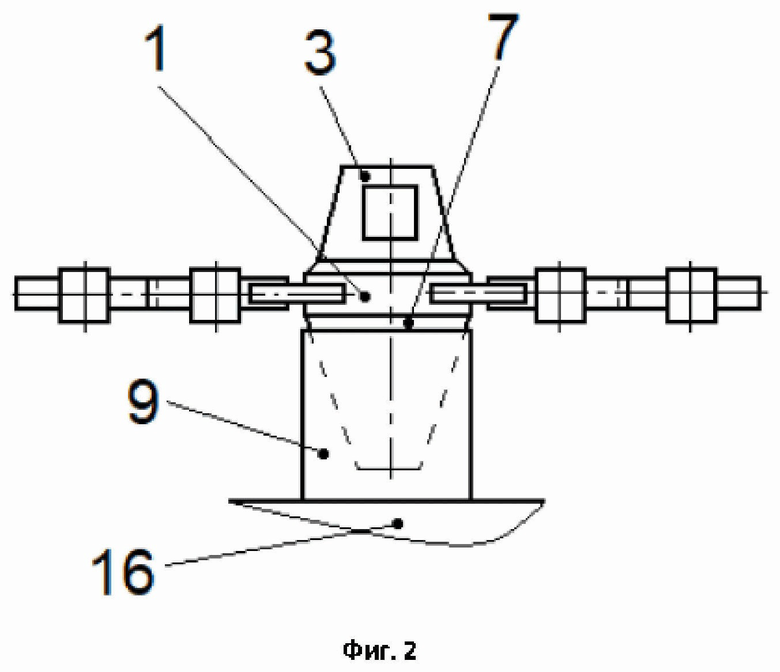
Беспилотный летательный аппарат вертикального взлета и посадки, содержащий блоки бортовой и радиолокационной аппаратуры, источник питания, блок управления, отличающийся тем, что на днище беспилотного летательного аппарата смонтирован стыковочный модуль, имеющий форму направленного вниз усеченного конуса, по периметру боковой поверхности усеченного конуса диаметрально его вертикальной оси симметрии выполнена канавка, стыковочный модуль смонтирован в посадочном модуле, сверху в посадочном модуле выполнена ниша, соответствующая по форме и размерам стыковочному модулю с возможностью размещения стыковочного модуля внутри посадочного модуля, в посадочном модуле по периметру радиально смонтированы фиксаторы, каждый из которых содержит подпружиненный стержень, наружный конец которого выполнен формой, соответствующей форме канавки в стыковочном модуле с возможностью его размещения в канавке и фиксации стыковочного модуля, на дне ниши посадочного модуля смонтирована пружина сжатия для амортизации беспилотного летательного аппарата, блок радиолокационной аппаратуры смонтирован в верхней части беспилотного летательного аппарата, блок бортовой аппаратуры, источник питания, блок управления размещены в стыковочном модуле.
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2492119C2 |
| МУЛЬТИКОПТЕР | 2022 |
|
RU2793985C1 |
| WO 2020116492 A1, 11.06.2020 | |||
| CN 109204772 A, 15.01.2019. | |||

