Изобретение относится к авиационной технике, а именно к летательным аппаратам вертикального взлета и посадки специального назначения, в частности к беспилотным летательным аппаратам, предназначенным для проведения спасательных работ в чрезвычайных ситуациях. Изобретение может быть использовано для мониторинга высотных зданий и сооружений, разведки обстановки внутри помещений, оказания экстренной помощи людям, терпящим бедствие на отсеченных пожаром верхних этажах зданий, путем доставки спасательного комплекта.
В состав такого комплекта могут входить аптечка, дымозащитная маска, фал с привязной системой и механизмом торможения. С помощью фала человек может совершить самостоятельный спуск по фасаду здания.
Известны беспилотные летательные аппараты (Заявки US №2009068033, МПК F04D 13/04; US №2010019098, МПК В64С 29/00; WO №2006016018, МПК В64С 27/20, 27/10), выполненные по аэродинамической схеме «винт в кольце». Однако эти аппараты не предназначены для проведения спасательных операций, в которых предполагается доставка терпящим бедствие людям необходимого снаряжения, и могут осуществлять только сбор информации.
За прототип принят МБЛА ВВП с движителем из двух соосных воздушных винтов противоположного вращения и электродвигателем в качестве силового агрегата, расположенного в центральном контейнере, и тремя рулевыми органами, представляющими собой миниатюрные винтомоторные группы с воздушными винтами малого диаметра, закрепленными равноудаленно от центрального контейнера на радиальных балках под углом 120 градусов (заявка DE №102005046155, МПК В64С 27/82, 27/10). Данный аппарат, как и упомянутые выше, предназначен исключительно для сбора информации (в основном визуальной с помощью видеокамеры) и не способен осуществить доставку и сброс (передачу) контейнера с полезной нагрузкой в заданную точку.
Задачей и техническим результатом данного изобретения являются создание МБЛА ВВП, обладающего хорошей маневренностью и управляемостью, с относительно высокой (до 30-40% от взлетного веса) долей полезной нагрузки, способного решать различные задачи, в том числе по доставке в заданную точку контейнера с содержимым, предназначенным для оказания конкретной помощи людям в условиях чрезвычайной ситуации.
Решение задачи и технический результат достигаются тем, что в МБЛА ВВП, содержащем силовую установку с соосными винтами противоположного вращения, расположенную в центральном контейнере, вокруг которого на равном расстоянии друг от друга установлены три рулевых органа, силовая установка содержит две винтомоторные группы - верхнюю и нижнюю, рулевые органы выполнены в виде импеллеров, расположенных в донной части трех периферийных цилиндрических контейнеров, проекции осей которых в горизонтальной плоскости являются вершинами равностороннего треугольника, а точкой пересечения его медиан является проекция оси центрального контейнера, при этом каждый периферийный цилиндрический контейнер соединен с центральным контейнером двумя парами перемычек, а между собой периферийные цилиндрические контейнеры соединены двумя парами углепластиковых трубок, причем первая группа пар перемычек и трубок расположена над верхней винтомоторной группой, а вторая - под нижней, между периферийными цилиндрическими контейнерами под верхними парами перемычек и трубок установлены в виде сегментов три съемные секции, образующие кольцевой аэродинамический канал, обеспечивающий прирост силы тяги и защищающий силовую установку от внешнего воздействия, снаружи к периферийным цилиндрическим контейнерам в трех точках на дистанционно управляемых замках подвешен транспортируемый контейнер тороидальной формы.
Также в МБЛА ВВП три периферийных цилиндрических контейнера выполнены разъемными, а их внутренний объем использован для размещения блоков питания, громкоговорителя и других элементов бортовой аппаратуры, углепластиковые перемычки имеют аэродинамический профиль, а их внутренние полости использованы для прокладки электропроводки, соединяющей элементы бортовой аппаратуры, размещенной в центральном и периферийных контейнерах.
Громкоговоритель для связи с терпящим бедствие человеком расположен в одном из периферийных контейнеров, а видеокамеры закреплены сверху и снизу центрального контейнера, причем верхняя видеокамера имеет подвижность в плоскостях XY и XZ на угол ±40°, нижняя видеокамера неподвижна и направлена вниз по оси Y.
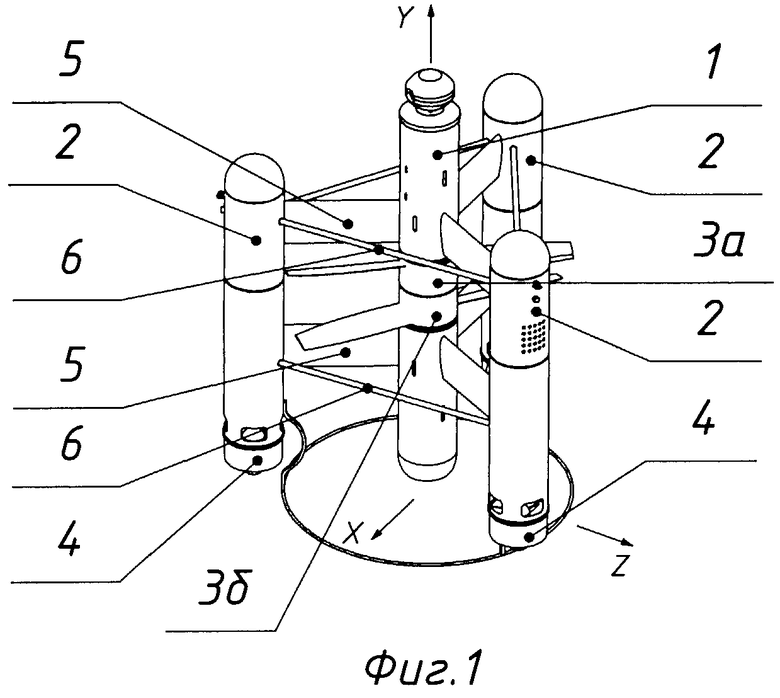
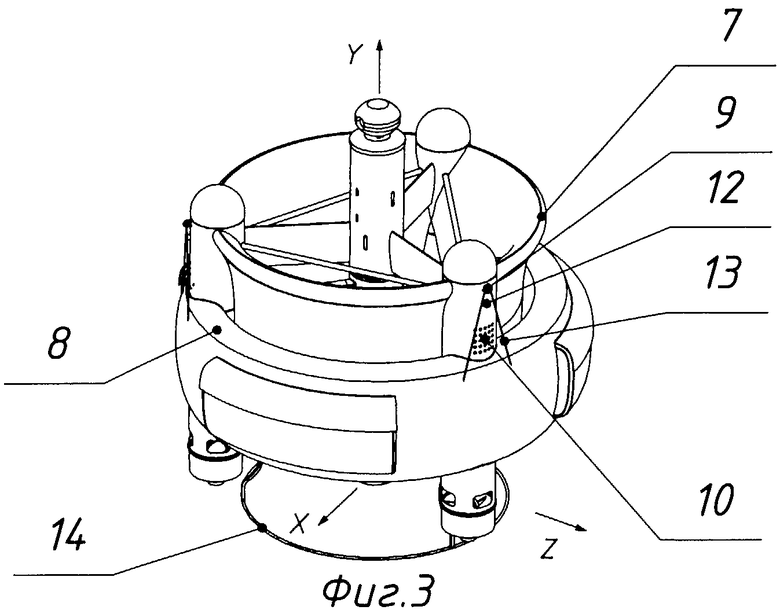
На Фиг.1 представлен базовый модуль МБЛА ВВП. На Фиг.2 - МБЛА ВВП с кольцевым аэродинамическим каналом. На Фиг.3 - МБЛА ВВП в сборе с транспортируемым тороидальным контейнером
Основными конструктивными элементами МБЛА ВВП являются четыре цилиндрических контейнера одинакового диаметра (Фиг.1). Один из них центральный 1 и три периферийных 2. В центральном контейнере 1 размещена силовая установка МБЛА ВВП с двумя независимыми винтомоторными группами 3а и 3б, установленными навстречу друг другу и отличающимися только тем, что в верхней винтомоторной группе 3а воздушный винт толкающий, а в нижней винтомоторной группе 3б воздушный винт тянущий. В качестве привода в каждой винтомоторной группе используются бесколлекторные электродвигатели с закрепленными на их валах воздушными винтами, причем электродвигатели размещены в центральном контейнере 1 выходными валами навстречу друг другу таким образом, что между обтекателями воздушных винтов имеется зазор. Силовая установка создает подъемную силу FT, превышающую вес аппарата в полной комплектации, чем и обеспечивается возможность его перемещения по вертикали.
Управление вращением аппарата вокруг своей оси симметрии (ось Y) достигается синхронным изменением скорости вращения обоих воздушных винтов на одинаковую по модулю, но противоположную по знаку величину. При этом возникает момент МY при неизменном значении силы тяги FT.
Обеспечение режима висения и перемещения аппарата в горизонтальной плоскости в условиях внешних возмущающих воздействий достигается путем отклонения вектора тяги FT от вертикали с помощью рулевых органов, расположенных в донной части периферийных цилиндрических контейнеров и представляющих собой три импеллера 4, создающих воздушную струю с силой тяги FTi каждый.
Около половины их суммарной силы тяги FTi добавляется к силе тяги FT основной силовой установки. Вторая половина силы тяги i-го канала - FTi используется для управления наклоном вектора тяги, создаваемого основной силовой установкой, чем и обеспечивается перемещение МБЛА ВВП в горизонтальной плоскости.
Проекции продольных осей трех периферийных цилиндрических контейнеров 2 в горизонтальной плоскости есть вершины равностороннего треугольника, а точка пересечения медиан есть проекция продольной оси центрального контейнера 1. Каждый из периферийных цилиндрических контейнеров 2 соединен с центральным контейнером 1 двумя перемычками 5. Перемычки имеют аэродинамический профиль, во внутренних полостях перемычек проложена электропроводка, соединяющая элементы бортовой аппаратуры, размещенной в центральном и периферийных контейнерах, во внутренних полостях которых проложены электрические жгуты питания. Для обеспечения необходимой жесткости конструкции периферийные цилиндрические контейнеры 2 соединены между собой углепластиковыми трубками 6. Первая группа пар перемычек и углепластиковых трубок расположена над верхней винтомоторной группой, а вторая под нижней винтомоторной группой. Из технологических и эксплуатационных потребностей периферийные цилиндрические контейнеры 2 выполнены разъемными, а центральный контейнер имеет зазор между обтекателями обоих воздушных винтов (фиг.1). Таким образом, базовый модуль может быть разобран на две части.
Также в каждом из трех контейнеров 2 размещены по одному блоку источников питания и другие элементы бортовой аппаратуры.
Описанная конструкция соответствует базовому варианту МБЛА ВВП, представленному на Фиг.1.
Кроме того, вокруг соосных винтов под верхними парами перемычек и трубок между периферийными цилиндрическими контейнерами могут быть закреплены (фиг.2) в виде сегментов три легкосъемные секции, образующие вокруг центрального контейнера кольцевой аэродинамический канал 7, в котором диаметр входного сечения больше диаметра выходного сечения. Канал защищает силовую установку от внешнего воздействия. Оснащение базового варианта кольцевым аэродинамическим каналом придает МБЛА ВВП ряд положительных качеств: невосприимчивость к небольшим столкновениям с препятствиями, травмобезопасность, увеличение силы тяги до 40-50% по сравнению с базовым вариантом.
С внешней стороны кольцевого аэродинамического канала 7 прикреплен на легкоплавкой леске 13 (фиг.3) специальный тороидальный контейнер 8, представляющий собой емкость из ткани, содержащую средства спасения (фал, противогаз, набор необходимых медикаментов и т.п.). Тороидальный контейнер 8 закреплен по окружности в трех точках на дистанционно управляемых замках 9, которые срабатывают по команде оператора «сброс» либо путем нажатия кнопки 12 при приеме контейнера терпящим бедствие человеком, при этом леска подвеса 13 пережигается.
Для обеспечения взаимодействия между оператором и спасаемым на борту аппарата имеется громкоговоритель 10, помещенный в один из периферийных цилиндрических контейнеров 2. Сверху и снизу центрального контейнера закреплены видеокамеры 11. Шасси аппарата выполнено в виде кольцевой опоры 14.
МБЛА ВВП функционирует следующим образом. Запуск электродвигателей силовой установки 1 осуществляют по команде оператора с пульта дистанционного управления, представляющего собой стандартную аппаратуру управления моделями.
Управление беспилотным летательным аппаратом при перемещении по вертикали осуществляют синхронным и одинаковым по величине и знаку изменением числа оборотов обоих двигателей силовой установки.
Управление по курсу (поворот вокруг оси Y без потери высоты) осуществляют регулировкой числа оборотов обоих двигателей силовой установки. При этом обороты обоих двигателей изменяют на величину, равную по модулю, но противоположную по знаку.
Режим висения и стабилизации аппарата при его перемещении в горизонтальной плоскости обеспечивает бортовая навигационная и управляющая система, непрерывно вырабатывающая команды для каждого из трех рулевых органов (импеллеров).
Оператор осуществляет полет как в пределах прямой видимости, так и по «картинкам» на мониторе, получаемым с видеокамер (преимущественно с верхней). На заключительном этапе МБЛА ВВП подводят к терпящему бедствие человеку и по громкой голосовой связи инструктируют его о действиях по снятию спаскомплекта. При невозможности такого контакта оператор сбрасывает контейнер в точку, наиболее удобную для его приема. После передачи контейнера со спаскомплектом считается, что МБЛА ВВП свою задачу выполнил, и его возвращают к месту старта.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2567496C1 |
| АВИАЦИОННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ СПАСАТЕЛЬНЫХ РАБОТ | 2008 |
|
RU2381959C1 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711633C2 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2016 |
|
RU2643063C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ СООСНЫЙ ЭЛЕКТРОВЕРТОЛЕТ | 2021 |
|
RU2753444C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН КРИШТОПА (БКК), СПОСОБ ФУНКЦИОНИРОВАНИЯ БКК И СПОСОБ ФУНКЦИОНИРОВАНИЯ УСТРОЙСТВА ВЕРТИКАЛЬНОГО ЗАПУСКА ПРИ ИСПОЛЬЗОВАНИИ С БКК | 2022 |
|
RU2809067C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2007 |
|
RU2378156C2 |
Изобретение относится к авиационной технике, в частности к малоразмерным беспилотным летательным аппаратам вертикального взлета и посадки (МБЛА ВВП). МБЛА состоит из центрального и трех периферийных контейнеров. Каждый периферийный контейнер соединен с центральным двумя парами перемычек, а между собой периферийные контейнеры соединены двумя парами углепластиковых трубок. Силовая установка, располагающаяся в центральном контейнере, содержит верхнюю и нижнюю винтомоторные группы. Рулевые органы выполнены в виде импеллеров, расположенных в донной части трех периферийных контейнеров. В проекции МБЛА представляет собой равносторонний треугольник, у которого вершинами являются оси периферийных контейнеров, а на точке пересечения медиан этого треугольника расположена ось центрального контейнера. К периферийным цилиндрическим контейнерам в трех точках на дистанционно управляемых замках подвешен транспортируемый контейнер тороидальной формы. В периферийных контейнерах располагаются блоки питания, громкоговоритель и другие элементы бортовой аппаратуры. На центральном контейнере сверху и снизу установлены видеокамеры. Достигается улучшение маневренности и управляемости. 3 з.п. ф-лы, 3 ил.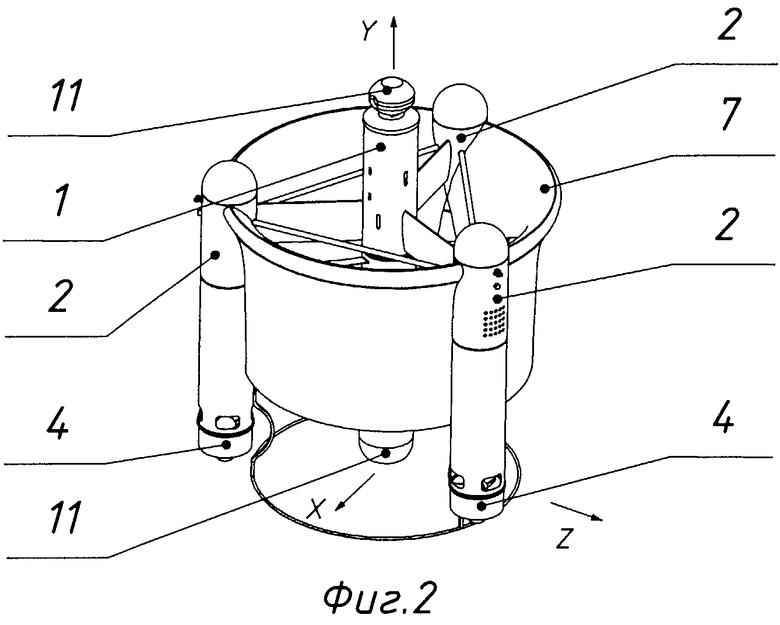
1. Малоразмерный беспилотный летательный аппарат вертикального взлета и посадки, содержащий силовую установку с соосными винтами противоположного вращения, расположенную в центральном контейнере, вокруг которого на равном расстоянии друг от друга установлены три рулевых органа, отличающийся тем, что силовая установка содержит две винтомоторные группы - верхнюю и нижнюю, рулевые органы выполнены в виде импеллеров, расположенных в донной части трех периферийных цилиндрических контейнеров, проекции осей которых в горизонтальной плоскости являются вершинами равностороннего треугольника, а точкой пересечения его медиан является проекция оси центрального контейнера, при этом каждый периферийный цилиндрический контейнер соединен с центральным контейнером двумя парами перемычек, а между собой периферийные цилиндрические контейнеры соединены двумя парами углепластиковых трубок, причем первая группа пар перемычек и углепластиковых трубок расположена над верхней винтомоторной группой, а вторая - под нижней, между периферийными цилиндрическими контейнерами под верхними парами перемычек и углепластиковых трубок установлены в виде сегментов три съемные секции, образующие кольцевой аэродинамический канал, обеспечивающий прирост силы тяги и защищающий силовую установку от внешнего воздействия, снаружи к периферийным цилиндрическим контейнерам в трех точках на дистанционно управляемых замках подвешен транспортируемый контейнер тороидальной формы.
2. Малоразмерный беспилотный летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что периферийные цилиндрические контейнеры выполнены разъемными, а их внутренний объем использован для размещения блоков питания, громкоговорителя для связи с терпящем бедствие человеком и других элементов бортовой аппаратуры.
3. Малоразмерный беспилотный летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что перемычки имеют аэродинамический профиль, а их внутренние полости использованы для прокладки электропроводки, соединяющей элементы бортовой аппаратуры, размещенной в центральном и периферийных контейнерах.
4. Малоразмерный беспилотный летательный аппарат вертикального взлета и посадки по п.1, отличающийся тем, что сверху и снизу центрального контейнера закреплены видеокамеры.
| DE 102005046155 A1, 12.04.2007 | |||
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ-КОНВЕРТОПЛАН-АМФИБИЯ (ВАРИАНТЫ) | 2005 |
|
RU2312795C2 |
| US 2003052222 A1, 20.03.2003 | |||
| US 2010019098 A1, 28.01.2010. | |||

