Изобретение относится к области авиации, в частности к системам управления двигателями вертолета и может быть использовано в системе управления двигателями летательного аппарата, содержащего автоматическую систему управления двигателями.
Известна система управления двигателями, на которых отсутствует автоматическое управление (патент ЕР 2415669, В64С 13/42, публ. 08.02.2012), при этом на рычаге общего шага имеется вращающаяся рукоятка, при вращении которой изменяется мощность двигателей. При такой системе управления двигателями пилот, поднимая или опуская рычаг общего шага, изменяет угол наклона лопастей несущего винта, что в свою очередь, требует изменение мощности двигателей. Поэтому, пилот, при движении рычага общего шага, вынужден поворачивать рукоятку на соответствующий угол.
Недостатком такой системы управления двигателями является усложнение пилотирования вертолета.
Для упрощения пилотирования вертолета на двигателях стали устанавливать автоматическую систему управления, которая обеспечивает постоянные обороты двигателей при различных потребностях мощности двигателей. Известна система управления (далее - САУ) двигателями вертолета, наиболее близкая к заявляемому техническому решению, (патент RU 2714958, В64С 13/42, публ. 21.02.2020), конструкция которой предусматривает управление двигателями, имеющих только гидромеханическую САУ, которая и является основной. В данной системе на рычаге общего шага имеется рукоятка коррекции, при вращении которой изменяется мощность двигателей. Пилот поворотом рукоятки коррекции устанавливает рычаг управления двигателем в положение, обеспечивающее максимальное значение мощности. При этом, гидромеханическая САУ выполняет ее снижение до величины, обеспечивающей рабочую (полетную) частоту вращения несущего винта (далее - НВ). В дальнейшем, пилот, поднимая или опуская рычаг общего шага, изменяет угол наклона лопастей несущего винта, а частота вращения НВ поддерживается гидравлической САУ постоянной.
При исправной автоматической системе управления двигателями вращение рукоятки не влияет на изменение мощности двигателей, поэтому в данном случае пилот, управляя общим шагом, не вращает рукоятку, которая находится в положении, соответствующему максимальной мощности двигателей.
Недостатки известной системы управления двигателями проявляются в случае отказа автоматической системы управления двигателями. В момент выхода из строя автоматической системы управления двигателями подключается ручной режим управления двигателями, при этом мощность двигателя зависит от положения рукоятки. Как было сказано выше, при исправной автоматической системе управления двигателями рукоятка находится в положении максимальной мощности двигателя. В этом случае мощность двигателя мгновенно увеличивается от потребного значения до максимального, что приводит к резкому скачку мощности двигателя, усложнению пилотирования вертолета и повышенной нагрузки на пилота, при этом повышается риск возникновения аварийных ситуаций.
Техническая проблема, не решенная в известных устройствах, решение которой обеспечивается заявляемым изобретением, заключается в создании системы управления двигателями, которая исключает резкое изменение мощности двигателя в случае выхода из строя автоматической системы управления двигателями.
Технический результат использования изобретения заключается в повышении безопасности полета, улучшении управляемости, снижении риска возникновения аварийных ситуаций, снижение нагрузки на пилота за счет стабилизации мощности двигателя в случае выхода из строя автоматической системы управления двигателями с помощью установленной и зафиксированной в заданном положении ручки на рычаге общего шага.
Для достижения технического результата предлагается система управления двигателями вертолета, содержащая рычаг общего шага 1, связанного с помощью системы 3 тяг и качалок с рычагом 4 управления мощностью двигателей, в соответствии с заявляемым изобретением отличающаяся тем, что на рычаге общего шага 1 установлена рукоятка 5 с возможностью поворота относительно своей оси на валу 14, который размещен внутри рычага общего шага 1, на валу 14 закреплена качалка 12, на рычаге общего шага 1 установлен фиксатор 6, содержащий упор 9 и штырь 8, соосно с которым расположены пружина 10 и винт 11, также соосно расположенные с механизмом 7 снятия с фиксатора, при этом фиксатор 6 снабжен рычагом 15 фиксатора.
При этом расстояние L от оси рычага общего шага 1 до оси качалки 12 определяет диапазон изменения угла установки рычагов управления мощностью двигателей 4, который обеспечивается поворотом рукоятки 5, расстояние L1 от оси вращения рычага общего шага 1 до оси качалки 12 определяет диапазон изменения угла установки рычагов управления мощностью двигателей 4, который обеспечивается за счет перемещения рычага общего шага 1.
Таким образом достигается технический результат.
Использование на рычаге общего шага 1 рукоятки 5, которая установлена с возможностью поворота относительно своей оси на валу 14, который размещен внутри рычага общего шага 1, на валу 14 закреплена качалка 12, наличие на рычаге общего шага 1 фиксатора 6, который содержит упор 9 и штырь 8, соосно с которым расположены пружина 10 и винт 11, также соосно расположенные с механизмом 7 снятия с фиксатора, применение рычага 15 фиксатора, направлено на повышение безопасности полета, улучшение управляемости вертолета при отказе автоматической системы управления двигателей, повышение безопасности полета, улучшение управляемости, снижения риска возникновения аварийных ситуаций, снижение нагрузки на пилота.
Повышение безопасности полета, улучшение управляемости вертолета, снижение нагрузки на пилота и снижение риска возникновения аварийных ситуаций достигается за счет того, с помощью фиксатора 6 положение рукоятки 5 зафиксировано в наиболее вероятном рассчитанном безопасном положении на рычаге 1 общего шага, и в случае выхода из строя автоматической системы управления двигателями, в момент автоматического подключения ручного режима управления двигателями мощность двигателя остается фиксированной, по сравнению с прототипом, в котором рукоятка 5 зафиксирована в положении максимальной мощности двигателя, что приводит к резкому скачку мощности двигателя при отказе автоматической системы управления двигателями.
Улучшение управляемости вертолета и снижение нагрузки на пилота по сравнению с прототипом достигается за счет того, что управление мощностью двигателей происходит путем вращения рукоятки 5, и не требует перемещения рычага общего шага 1, кроме того разработанная взаимосвязь управления общим шагом с управлением двигателями позволяет уменьшить применение рукоятки 5 в ручном режиме для коррекции мощности двигателями; кроме того фиксатор 6 расположен на рычаге общего шага командира воздушного судна таким образом, что для снятия рукоятки 5 с фиксатора 6 достаточно нажать ребром ладони левой руки на рычаг 15 без необходимости перемещения руки вдоль рычага общего шага 1.
Сущность предлагаемого изобретения поясняется чертежами:
фиг. 1 - общий вид системы управления двигателями вертолета;
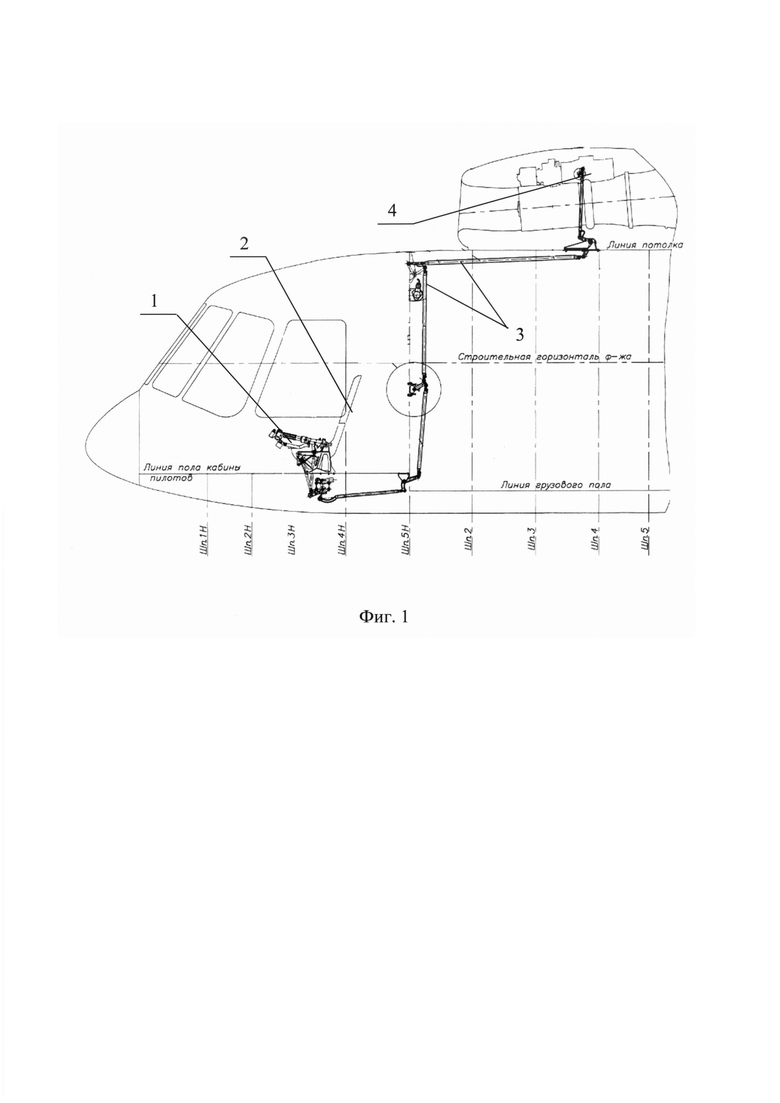
фиг. 2 - вид на рычаг общего шага с фиксатором;
фиг. 3 - Разрез А-А фиг. 2;
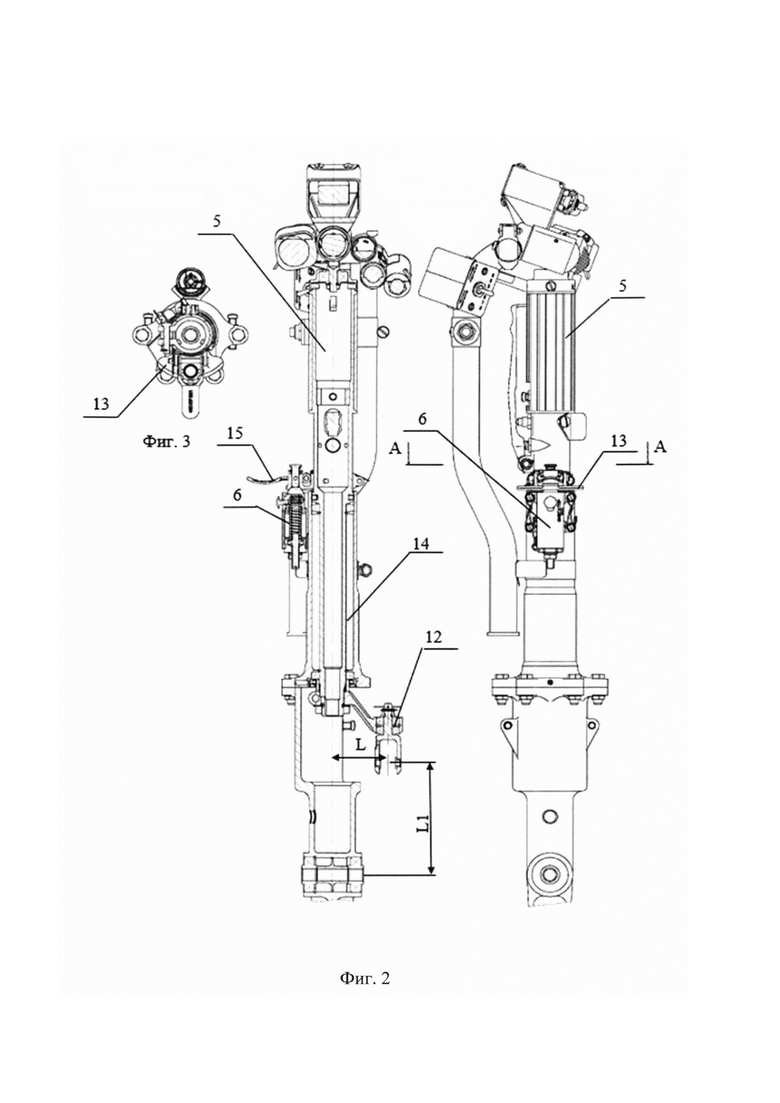
фиг. 4 - рукоятка в зафиксированном положении;
фиг. 5 - рукоятка в расфиксированном положении;
фиг. 6 - график по определению оптимальной зависимости «шаг-газ», т.е. угла установки лопастей НВ от угла поворота рычага общего шага.
Система управления двигателями вертолета (фиг. 1) состоит из рычага общего шага 1, расположенного слева от кресла 2 пилота и связанного с помощью системы 3 тяг и качалок с рычагом 4 управления мощностью двигателей.
На рычаге общего шага 1 (фиг. 2) расположена рукоятка 5 управления мощностью двигателей и фиксатор 6, снабженный рычагом 15 фиксатора. Рукоятка 5 установлена с возможностью поворота относительно своей оси навалу 14, который размещен внутри рычага общего шага 1. На валу 14 закреплена качалка 12.
Расстояние L от оси рычага общего шага 1 оси качалки 12 определяет диапазон изменения угла установки рычагов управления мощностью двигателей 4, который обеспечивается поворотом рукоятки 5. Расстояние L1 от оси вращения рычага общего шага 1 до оси качалки 12 определяет диапазон изменения угла установки рычагов управления мощностью двигателей 4, который обеспечивается за счет перемещения рычага общего шага 1. С рукояткой 5 связаны механизм 7 снятия с фиксатора и сектор 13 (фиг. 3). Сектор 13 связан с рукояткой 5, в секторе 13 выполнено отверстие, в которое входит штырь фиксатора 6.
Фиксатор 6 содержит расположенные на одной оси штырь 8 и упор 9, который перемещается с помощью пружины 10, усилие которой регулируется винтом 11 (фиг. 4, 5). При этом штырь 8, пружина 10 и винт 11 расположены соосно между собой и с механизмом 7 снятия с фиксатора.
При работающей автоматической системе управления поворотная рукоятка 5 управления мощностью двигателей зафиксирована фиксатором 6, и на работу двигателей влияет только положение рычага общего шага 1, движение которого передается на рычаги управления мощностью двигателей 4 через систему 3 тяг и качалок.
Удержание поворотной рукоятки 5 от поворота обеспечивается за счет попадания штыря 8 в отверстие сектора 13. Штырь 8 удерживается в отверстии сектора 13 под действием пружины 10 (фиг. 2, 3). Усилие пружины регулируется винтом 11. Фиксатор 6 расположен на рычаге общего шага 1 командира воздушного судна таким образом, чтобы снятие рукоятки 5 с фиксатора 6 производилось путем нажатия ребром ладони левой руки на рычаг 15 без значительного перемещения руки вдоль рычага общего шага 1.
При выходе из строя автоматической системы управления переход управления двигателями с автоматического управления на ручное происходит без усложнения пилотирования, так как рукоятка управления мощностью двигателей 5 зафиксирована фиксатором 6 в оптимальном положении. После перехода на ручное управление рукоятка 5 снимается с фиксатора 6. Для этого командир воздушного судна нажимает на рычаг 15 механизма 7 снятия с фиксатора 6 и выдавливает штырь 8 из отверстия сектора 14. Удержание штыря 8 в новом положении обеспечивает упор 9 (фиг. 4). Таким образом управление мощностью двигателей происходит путем вращения рукоятки 5, и не требует перемещения рычага общего шага 1.
Для определения оптимального положения рукоятки 5 управления мощностью двигателей были проведены множественные эксперименты во время летных испытаний вертолета, в которых имитировался отказ автоматической системы управления двигателями. Результаты экспериментов были сведены в график зависимости угла установки лопастей несущего винта от угла поворота рычага управления двигателями (фиг. 5). Анализ данного графика позволил определить оптимальное положение рукоятки 5, которое предварительно фиксируют на рычаге общего шага 1 с помощью фиксатора 6.
Необходимость применения рукоятки 5 управления мощностью двигателей зависит от типа возможного отказа. Различные варианты отказов приведены ниже.
Двигатели работают, блоки автоматического регулирования и контроля (далее - БАРКи) работают - при этом рукоятка 5 зафиксирована фиксатором 6; не используется.
Двигатели работают, один БАРК находится в состоянии отказа, поддержание оборотов выполняет рабочий БАРК - при этом рукоятка 5 снята с фиксатора 6; применение рукоятки 5 необходимо для уменьшения разнорежимности двигателей.
Двигатели работают, два БАРКа находятся в состоянии отказа - при этом рукоятка 5 снята с фиксатора 6; применение рукоятки 5 необходимо для поддержания оборотов несущего винта.
Один двигатель находится в состоянии отказа, БАРК второго двигателя работает - при этом рукоятка 5 зафиксирована фиксатором 6; не используется.
Один двигатель и БАРК второго двигателя находятся в состоянии отказа, - при этом рукоятка 5 снята с фиксатора 6; применение рукоятки 5 необходимо для поддержания оборотов несущего винта.
Два двигателя находятся в состоянии отказа, т.е. полет проходит в режиме авторотации - при этом рукоятка 5 зафиксирована фиксатором 6; не используется.
Таким образом достигается технический результат, за счет того, что в поворотную рукоятку 5 устанавливается фиксатор 6, который удерживает рукоятку 5 от поворота в соответствующем положении, которое выбирается из условия наиболее вероятного значения мощности двигателя. Снятие рукоятки 5 с фиксатора 6 возможно при нажатии на размещенную на нем клавишу или путем поворота рукоятки 5 с некоторым усилием, дальнейшее управление двигателем с отказавшей электронной системы автоматического управления производится перемещением рычага общего шага и поворотом рукоятки 5.
Снижение риска возникновения аварийных ситуаций достигается за счет того, что фиксатор 6 удерживает рукоятку 5 в положении, которое обеспечивает переход на ручное управление мощностью двигателей без ощутимого переходного процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| КОМАНДНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2751721C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЁТОМ | 2023 |
|
RU2819837C1 |
| Узел объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления и муфта сцепления для него | 2017 |
|
RU2652866C1 |
| АВТОЖИР | 2007 |
|
RU2360837C2 |
| ПОЖАРНЫЙ ГИДРОВЕРТОЛЕТ-КРАН | 2022 |
|
RU2797539C1 |
| КОНВЕРТОПЛАН С РЕАКТИВНЫМ ПРИВОДОМ РОТОРОВ, УПРАВЛЯЕМЫЙ РОТОРАМИ ПОСРЕДСТВОМ АВТОМАТОВ ПЕРЕКОСА ЧЕРЕЗ РЫЧАГИ УПРАВЛЕНИЯ, НЕ ТРЕБУЮЩИЙ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ УПРАВЛЕНИЯ | 2013 |
|
RU2570241C2 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2796703C2 |
| СИСТЕМА ТОРМОЖЕНИЯ КОЛЕС ШАССИ ВЕРТОЛЕТА | 2023 |
|
RU2796557C1 |
| ВЕРТОЛЕТ ПРОДОЛЬНОЙ СХЕМЫ | 2009 |
|
RU2407675C1 |

Изобретение относится к области авиации, в частности к системам управления двигателями вертолета, и может быть использовано в системе управления двигателями летательного аппарата, содержащего автоматическую систему управления двигателями. Система управления двигателями вертолета содержит рычаг общего шага (1), связанный с помощью системы (3) тяг и качалок с рычагом (4) управления мощностью двигателей. На рычаге общего шага (1) установлена рукоятка (5) с возможностью поворота относительно своей оси на валу (14), который размещен внутри рычага общего шага (1). На валу (14) закреплена качалка (12), на рычаге общего шага (1) установлен фиксатор (6), содержащий упор (9) и штырь (8), соосно с которым расположены пружина (10) и винт (11), также соосно расположенные с механизмом (7) снятия с фиксатора. При этом фиксатор (6) снабжен рычагом (15) фиксатора. Обеспечивается повышение безопасности полета, улучшение управляемости, снижение риска возникновения аварийных ситуаций, снижение нагрузки на пилота. 1 з.п. ф-лы, 6 ил.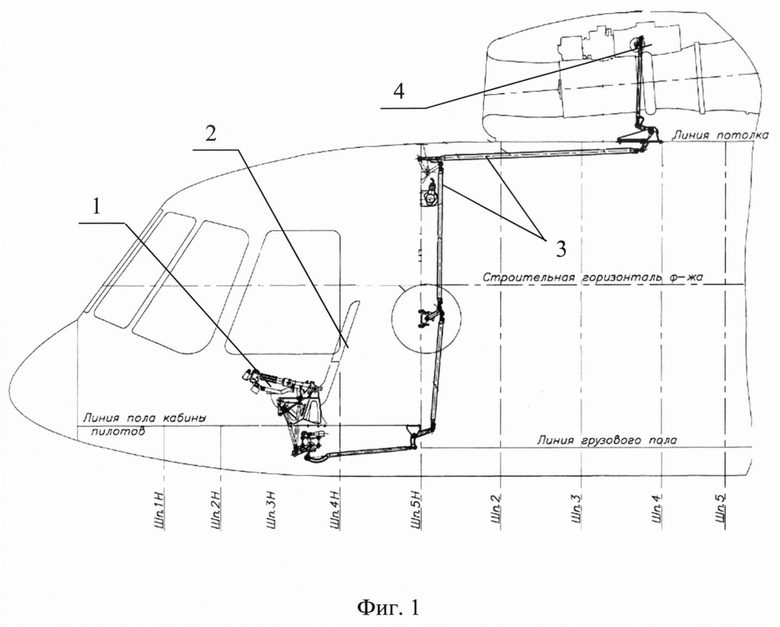
1. Система управления двигателями вертолета, содержащая рычаг общего шага (1), связанный с помощью системы (3) тяг и качалок с рычагом (4) управления мощностью двигателей, отличающаяся тем, что на рычаге общего шага (1) установлена рукоятка (5) с возможностью поворота относительно своей оси на валу (14), который размещен внутри рычага общего шага (1), на валу (14) закреплена качалка (12), на рычаге общего шага (1) установлен фиксатор (6), содержащий упор (9) и штырь (8), соосно с которым расположены пружина (10) и винт (11), также соосно расположенные с механизмом (7) снятия с фиксатора, при этом фиксатор (6) снабжен рычагом (15) фиксатора.
2. Система управления двигателями вертолета по п. 1, отличающаяся тем, что расстояние L от оси рычага общего шага (1) до оси качалки (12) определяет диапазон изменения угла установки рычагов управления мощностью двигателей (4), который обеспечивается поворотом рукоятки (5), расстояние L1 от оси вращения рычага общего шага (1) до оси качалки (12) определяет диапазон изменения угла установки рычагов управления мощностью двигателей (4), который обеспечивается за счет перемещения рычага общего шага (1).
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| "Объединенное управление общим шагом несущего винта и двигателями", найдено в интернет онлайн, https://avia.pro/blog/obedinennoe-upravlenie-obshchim-shagom-nesushchego-vinta-i-dvigatelyami, опубликовано 27.05.2015 | |||
| РУЧКА УПРАВЛЕНИЯ ОБЩИМ ШАГОМ НЕСУЩЕГО ВИНТА И ДВИГАТЕЛЯМИ (ШАГ-ГАЗ) ВЕРТОЛЕТА | 0 |
|
SU170303A1 |
| US 20120032031 A1, 09.02.2012 | |||
| СПОСОБ ПОДДЕРЖАНИЯ ЧИСЛА ОБОРОТОВ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА В ДОПУСТИМЫХ ПРЕДЕЛАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231479C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2061616C1 |

