Изобретение относится к системам автоматизации работы конвейеров и может быть использовано в железнодорожной отрасли промышленности.
В качестве прототипа выбрана система управления конвейерами полувагонов-накопителей железнодорожного состава, содержащая устройство управления и подключенные к нему датчик контроля полноты загрузки кузова полувагона-накопителя сыпучим материалом в продольной плоскости, а также лазерный датчик контроля высоты насыпного конуса, при этом устройство управления выполнено с возможностью изменения скорости движения ленты конвейера в зависимости от полноты загрузки кузова полувагона-накопителя сыпучим материалом в продольной плоскости и высоты насыпного конуса
[RU 2250945, дата публикации: 27.04.2005 г.]
Недостатком прототипа является возможная неполная загрузка сыпучим материалом полувагона-накопителя железнодорожного состава из-за отсутствия в системе данных о параметрах образовавшегося естественного откоса сыпучего материала, непосредственно влияющих на равномерность его распределения в поперечной плоскости кузова, поскольку лазерный датчик обеспечивает возможность получения данных лишь о достижении наиболее высокой точкой поверхности насыпного конуса определенной высоты над поверхностью ленты конвейера, вследствие чего увеличение скорости ленты конвейера для продвижения сыпучего материала может происходить раньше, чем поперечная плоскость кузова будет заполнена до технически максимально возможного предела полувагона-накопителя, в результате чего полезный объем кузова полувагона-накопителя может использоваться нерационально, тем самым свидетельствуя о несовершенстве системы управления конвейерами полувагонов-накопителей железнодорожного состава и необходимости улучшения ее эксплуатационных характеристик.
Техническая проблема, на решение которой направлено изобретение, заключается в необходимости улучшения эксплуатационных характеристик системы управления конвейерами полувагонов-накопителей железнодорожного состава.
Технический результат, на достижение которого направлено изобретение, заключается в обеспечении возможности определения устройством управления полноты загрузки сыпучим материалом поперечной плоскости кузова полувагона-накопителя железнодорожного состава и повышении полноты загрузки кузова полувагона-накопителя сыпучим материалом в целом.
Сущность изобретения заключается в следующем.
Система управления конвейерами полувагонов-накопителей железнодорожного состава содержит устройство управления, выполненное с возможностью определения полноты загрузки кузова полувагона-накопителя сыпучим материалом в продольной плоскости и с возможностью изменения скорости движения ленты конвейера в зависимости от полноты загрузки кузова полувагона-накопителя сыпучим материалом в продольной плоскости. В отличие от прототипа система содержит камеру технического зрения, установленную в начале полувагона-накопителя таким образом, чтобы начало конвейерной ленты было расположено в области захвата камеры, а устройство управления выполнено с возможностью определения полноты загрузки полувагона-накопителя сыпучим материалом в поперечной плоскости на основании значений высоты насыпного конуса и величины угла между боковой поверхностью насыпного конуса сыпучего материала и внутренней поверхностью борта кузова, получаемых от камеры технического зрения, и изменения скорости движения ленты конвейера в зависимости от полноты загрузки кузова полувагона-накопителя сыпучим материалом в поперечной плоскости.
Устройство управления может быть представлено промышленным контроллером или компьютером, установленным в кабине машиниста железнодорожного состава, в том числе в пульте управления, или в ином месте полувагона накопителя или концевого вагона.
Устройство управления выполнено с возможностью определения полноты загрузки кузова полувагона-накопителя сыпучим материалом в продольной (по длине) и поперечной (по ширине и высоте) плоскостях и с возможностью изменения скорости движения ленты конвейера в зависимости от полноты загрузки кузова полувагона-накопителя сыпучим материалом в упомянутых плоскостях, что повышает полноту загрузки сыпучим материалом кузова полувагона-накопителя в целом.
Для определения скорости движения ленты конвейера система управления может содержать датчики вращения приводов или контроля перемещения ленты или иные датчики, обеспечивающие аналогичный функционал. Кроме того, такой функционал может обеспечиваться устройством управления на основе данных о характеристиках потребляемого приводами в момент их вращения электрического тока.
Для определения полноты загрузки кузова полувагона-накопителя сыпучим материалом в продольной плоскости система управления может содержать подключенные к устройству управления датчики различных типов, в том числе оптические или ультразвуковые датчики. Предпочтительно, датчики могут быть закреплены в центральных частях ограничительных балок кузова полувагона-накопителя таким образом, чтобы их чувствительные элементы были ориентированы в сторону полотна конвейерной ленты.
Изменение скорости движения ленты конвейера в зависимости от полноты загрузки полувагона-накопителя сыпучим материалом в продольной плоскости кузова обеспечивается устройством управления за счет алгоритма, который учитывает данные от датчиков определения полноты загрузки кузова текущего и остальных полувагонов-накопителей сыпучим материалом в продольной плоскости. Для дополнительного повышения полноты загрузки кузова полувагона-накопителя сыпучим материалом устройство управления может быть выполнено с возможностью снижения скорости привода конвейерных лент текущего и предыдущего по отношению к нему полувагонов-накопителей при определении заполнения текущего полувагона-накопителя сыпучим материалом на 60-80% в продольной плоскости.
Для определения полноты загрузки кузова полувагона-накопителя сыпучим материалом в поперечной плоскости система содержит камеру технического зрения, которая обеспечивает возможность получения данных о высоте насыпного конуса, а также об угле между боковой поверхностью насыпного конуса и внутренней поверхностью борта кузова, позволяя устройству управления определить полноту загрузки полувагона-накопителя сыпучим материалом в поперечной плоскости. Предпочтительно камера технического зрения может быть закреплена в центральной части ограничительной балки кузова полувагона-накопителя. Данные о допустимых величинах упомянутых угла и высоты могут храниться в устройстве управления, а введенные данные могут быть выбраны исходя из цели обеспечения максимально полной загрузки кузова полувагона-накопителя сыпучим материалом в поперечной плоскости, при условиях отсутствия риска пересыпания материала через борт кузова и возможности перемещения всего объема материала до полного заполнения кузова в продольной плоскости. Выбор данных величин может быть основан на виде сыпучего материала, размере его частиц и его насыпной плотности, а также на технических характеристиках конвейера и кузова, в частности высоте его бортов, тяговых характеристиках приводов конвейера, прочностных характеристик ленты и пр.
Изменение скорости движения ленты конвейера в зависимости от полноты загрузки полувагона-накопителя сыпучим материалом в поперечной плоскости кузова обеспечивается устройством управления за счет алгоритма, который учитывает высоту насыпного конуса и угол между боковой поверхностью насыпного конуса сыпучего материала и внутренней поверхностью борта кузова, полученные от камеры технического зрения, и сопоставляет их с имеющимися в памяти устройства управления допустимыми величинами данных параметров. Изменение скорости движения ленты конвейера при этом может обеспечиваться при непосредственном совпадении получаемых данных с содержащимися в устройстве управления или при прогнозировании устройством управления приближения данных величин к заданным.
Дополнительно для снижения риска возникновения перегруза кузова полувагона-накопителя сыпучим материалом система может содержать тензометрический датчик, установленный на кузове полувагона-накопителя, в частности на его раме или колесной тележке, а устройство управления может быть дополнительно выполнено с возможностью изменения скорости движения ленты конвейера в зависимости от данных, получаемых этим датчиком.
Изобретение может быть выполнено из известных материалов с помощью известных средств, что свидетельствует о его соответствии критерию патентоспособности «промышленная применимость».
Изобретение характеризуется ранее неизвестной из уровня техники совокупностью существенных признаков, отличающейся тем, что устройство управления выполнено с возможностью определения полноты загрузки кузова полувагона-накопителя сыпучим материалом как в продольной, так и в поперечной плоскостях, при этом для определения полноты загрузки кузова в поперечной плоскости система содержит камеру технического зрения, обеспечивающую возможность получения данных о высоте насыпного конуса и величине угла между боковой поверхностью насыпного конуса сыпучего материала и внутренней поверхностью борта кузова.
Предложенная система управления конвейерами полувагонов-накопителей железнодорожного состава позволяет получать более полный объем данных о параметрах образовавшегося естественного откоса насыпного материала, непосредственно влияющих на равномерность его распределения в поперечной плоскости кузова, и управлять перемещением ленты конвейера таким образом, чтобы поперечная плоскость кузова была заполнена до технически максимально возможного предела.
Благодаря этому обеспечивается достижение технического результата, заключающегося в обеспечении возможности определения устройством управления полноты загрузки сыпучим материалом поперечной плоскости кузова полувагона-накопителя железнодорожного состава и улучшении эксплуатационных характеристик системы управления конвейерами полувагонов-накопителей железнодорожного состава.
Изобретение обладает ранее неизвестной из уровня техники совокупностью существенных признаков, что свидетельствует о его соответствии критерию патентоспособности «новизна».
Из уровня техники не известны существенные признаки изобретения, что свидетельствует о соответствии критерию патентоспособности «изобретательский уровень».
Изобретение поясняется следующими фигурами:
фиг. 1 - полувагон-накопитель, общий вид;
фиг. 2 - полувагон-накопитель, сыпучий материал размещен на конвейерной ленте полувагона-накопителя и имеет высоту h насыпного конуса и угол α между поверхностью насыпного конуса и внутренней поверхностью борта кузова, поперечный разрез.
Для иллюстрации возможности реализации и более полного понимания сути изобретения ниже представлен вариант его осуществления, который может быть любым образом изменен или дополнен, при этом настоящее изобретение ни в коем случае не ограничивается представленным вариантом.
Система управления конвейерами полувагонов-накопителей железнодорожного состава содержит устройство 10 управления, представленное промышленным компьютером. Устройство 10 управления выполнено с возможностью определения скорости вращения приводов конвейеров на основании данных о характеристиках потребляемого ими тока.
К устройству 10 управления подключены устройства контроля полноты загрузки кузова в поперечной и продольной плоскостях, установленные на каждом полувагоне-накопителе и включающие в себя камеру 12 технического зрения, и ультразвуковые датчики 14. Камера 12 установлена в начале полувагона-накопителя таким образом, что начало конвейерной ленты расположено в области захвата камеры. Более конкретно, камера 12 закреплена на ограничительной балке 20 первой трети полувагона-накопителя. Датчики 14 установлены в начале и в конце полувагона-накопителя и закреплены на ограничительных балках 20 таким образом, чтобы их чувствительные элементы были ориентированы в сторону полотна конвейерной ленты. Также система управления конвейерами полувагонов-накопителей железнодорожного состава содержит тензометрический датчик 16 массы подключенный к устройству 10 управления и установленный на раме 22 полувагона-накопителя.
Вышеописанная система управления конвейерами установлена на составе для засорителей СЗ-800, состоящем из щебнеочистительной машины, нескольких полувагонов-накопителей и концевого вагона.
Изобретение работает следующим образом.
Перед началом работы конвейеров исходя из размера частиц сыпучего материала и его насыпной плотности, а также из технических характеристик полувагона-накопителя предварительно определяют допустимые высоту h насыпного конуса сыпучего материала и угол α между боковой поверхностью насыпного конуса и внутренней поверхностью борта кузова с целью исключения перегруза конвейера или превышения высоты борта кузова.
При начале работы выбросного конвейера щебнеочистительной машины и поступлении сыпучего материала в первый полувагон-накопитель датчик 14, установленный в начале первого полувагона-накопителя, регистрирует наличие материала на ленте конвейера, и устройство 10 управления запускает привод конвейерной ленты первого полувагона-накопителя, а также приводы всех последующих, кроме последнего, полувагонов-накопителей на максимальную скорость, а привод конвейерной ленты последнего полувагона-накопителя запускает на минимальную скорость, в результате чего осуществляется транспортировка сыпучего материала к последнему полувагону.
Датчик 14, установленный в начале последнего полувагона-накопителя, регистрирует наличие материала на ленте и она движется с минимальной скоростью. Постепенно происходит образование насыпного конуса в начале последнего полувагона накопителя, а камера 12 осуществляет контроль за высотой h насыпного конуса и углом α между поверхностью насыпного конуса и бортом конвейера. При достижении насыпным конусом заданной допустимой высоты h, устройство 10 управления увеличивает скорость движения ленты конвейера последнего полувагона накопителя и образовавшийся насыпной конус постепенно продвигается к концу последнего полувагона-накопителя.
При определении устройством 10 (на основании данных о скорости движения ленты и начале поступления сыпучего материала на полотно конвейера) заполнения последнего полувагона сыпучим материалом на 60-80% по его длине устройство 10 управления снижает скорость привода конвейерной ленты последнего полувагона-накопителя, а также снижает скорость привода конвейерной ленты предыдущего полувагона-накопителя в результате чего осуществляется медленное заполнение остаточного объема последнего и одновременно с этим начинается постепенное заполнение предпоследнего полувагона-накопителя сыпучим материалом. При заполнении последнего полувагона на 95-100% устройство 10 управления останавливает привод конвейерной ленты последнего полувагона-накопителя. Аналогичным образом осуществляют процесс полного заполнения предыдущего и каждого последующего за ним полувагонов-накопителей до головы состава.
При заполнении железнодорожного состава возможно возникновение перегруза одного или нескольких полувагонов-накопителей. Контроль перегруза осуществляют при помощи тензометрических датчиков 16 массы, определяющих нагрузку на раму. При регистрации датчиком 16 одного из полувагонов-накопителей нагрузки на раму, превышающей допустимую величину, устройство 10 управления сигнализирует об этом на панель управления машиниста и изменяет скорость его заполнения или останавливает процесс для исключения перегруза полувагона-накопителя.
Предложенная система управления конвейерами полувагонов-накопителей железнодорожного состава позволяет получать более полный объем данных о параметрах образовавшегося естественного откоса насыпного материала, непосредственно влияющих на равномерность его распределения в поперечной плоскости кузова, и управлять перемещением ленты конвейера таким образом, чтобы поперечная плоскость кузова была заполнена до технически максимально возможного предела.
Таким образом обеспечивается достижение технического результата, заключающегося в обеспечении возможности определения устройством управления полноты загрузки сыпучим материалом поперечной плоскости кузова полувагона-накопителя железнодорожного состава и улучшении эксплуатационных характеристик системы управления конвейерами полувагонов-накопителей железнодорожного состава.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ПЕРЕГРУЗКИ СЫПУЧЕГО МАТЕРИАЛА ВДОЛЬ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 1993 |
|
RU2042760C1 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ ПОЛУВАГОНОВ С БОКОВЫМИ РАЗГРУЗОЧНЫМИ ЛЮКАМИ В ПОЛУ | 2015 |
|
RU2611670C2 |
| Устройство для загрузки составов шахтных вагонеток | 1976 |
|
SU653410A1 |
| Устройство для дозированной погрузки сыпучих материалов в железнодорожные полувагоны | 1981 |
|
SU1006350A1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ПЕРЕГРУЗКИ СЫПУЧЕГО МАТЕРИАЛА | 1995 |
|
RU2102549C1 |
| УСТРОЙСТВО ДЛЯ ЗАПОЛНЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА НАСЫПНЫМ ГРУЗОМ | 1997 |
|
RU2137697C1 |
| УДАРОСТОЙКОЕ УВЯЗОЧНОЕ УСТРОЙСТВО, СТЕНА КУЗОВА ЖЕЛЕЗНОДОРОЖНОГО ПОЛУВАГОНА, КУЗОВ ЖЕЛЕЗНОДОРОЖНОГО ПОЛУВАГОНА И ЖЕЛЕЗНОДОРОЖНЫЙ ПОЛУВАГОН | 2013 |
|
RU2554898C1 |
| Способ непрерывной погрузки сыпучих и кусковых материалов с подпором в железнодорожные полувагоны | 1978 |
|
SU725985A1 |
| Транспортная система для перегрузки сыпучего материала вдоль железнодорожного состава | 1990 |
|
SU1754830A1 |
| Устройство для перегрузки сыпучего материала | 1990 |
|
SU1782900A1 |
Изобретение относится к системам управления конвейерами полувагонов-накопителей железнодорожного состава. Система содержит устройство управления, выполненное с возможностью определения полноты загрузки кузова полувагона-накопителя сыпучим материалом как в продольной, так и в поперечной плоскостях, при этом для определения полноты загрузки кузова в поперечной плоскости система содержит камеру технического зрения, обеспечивающую возможность получения данных о высоте насыпного конуса и величине угла между боковой поверхностью насыпного конуса сыпучего материала и внутренней поверхностью борта кузова. Достигается возможность определения полноты загрузки сыпучим материалом поперечной плоскости кузова полувагона-накопителя железнодорожного состава. 1 н. и 4 з.п. ф-лы, 2 ил.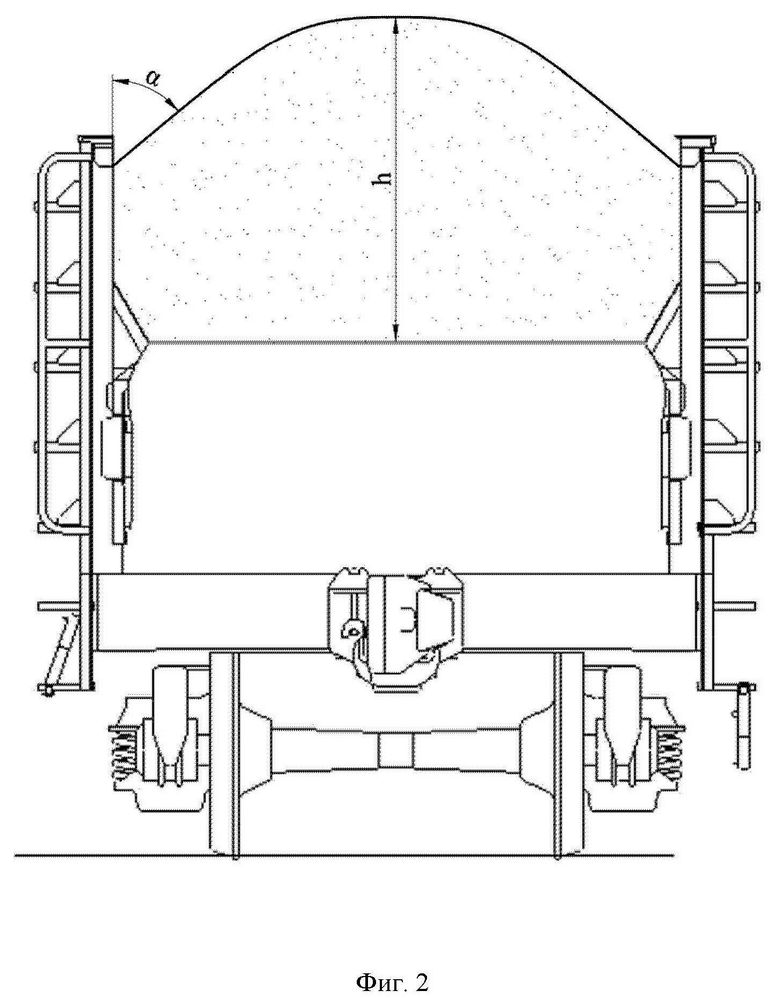
1. Система управления конвейерами полувагонов-накопителей железнодорожного состава, содержащая устройство управления, выполненное с возможностью определения полноты загрузки кузова полувагона-накопителя сыпучим материалом в продольной плоскости и с возможностью изменения скорости движения ленты конвейера в зависимости от полноты загрузки кузова полувагона-накопителя сыпучим материалом в продольной плоскости, отличающаяся тем, что содержит камеру технического зрения, установленную в начале полувагона-накопителя таким образом, чтобы начало конвейерной ленты было расположено в области захвата камеры, а устройство управления выполнено с возможностью определения полноты загрузки полувагона-накопителя сыпучим материалом в поперечной плоскости на основании значений высоты насыпного конуса и величины угла между боковой поверхностью насыпного конуса сыпучего материала и внутренней поверхностью борта кузова, получаемых от камеры технического зрения, и изменения скорости движения ленты конвейера в зависимости от полноты загрузки кузова полувагона-накопителя сыпучим материалом в поперечной плоскости.
2. Система по п.1, отличающаяся тем, что для обеспечения возможности определения устройством управления полноты загрузки кузова полувагона-накопителя сыпучим материалом в продольной плоскости содержит подключенные к устройству управления датчики, закрепленные в центральных частях ограничительных балок кузова полувагона-накопителя таким образом, чтобы их чувствительные элементы были ориентированы в сторону полотна конвейерной ленты.
3. Система по п.1, отличающаяся тем, что устройство управления выполнено с возможностью снижения скорости привода конвейерных лент текущего и предыдущего по отношению к нему полувагонов-накопителей при определении заполнения текущего полувагона-накопителя сыпучим материалом на 60-80% в продольной плоскости.
4. Система по п.1, отличающаяся тем, что камера технического зрения закреплена в центральной части ограничительной балки кузова полувагона-накопителя.
5. Система по п.1, отличающаяся тем, что содержит тензометрический датчик, установленный на кузове полувагона-накопителя, а устройство управления выполнено с возможностью изменения скорости движения ленты конвейера в зависимости от данных, получаемых этим датчиком.
| СПОСОБ ЗАГРУЗКИ ГРУЗОВОГО СОСТАВА | 2003 |
|
RU2256021C2 |
| WO 2015113726 A1, 06.08.2015 | |||
| US 9346473 B1, 24.05.2016 | |||
| CN 113879866 A, 04.01.2022 | |||
| CN 115321209 B, 22.12.2023 | |||
| Способ получения бутилкаучука | 1974 |
|
SU504497A3 |

