Область техники, к которой относится изобретение
Данное изобретение относится к способам определения местоположения подводных объектов, излучающих звуки, при котором используют как минимум два разнесенных гидроакустических приемника, при помощи которых производят запись аналогового сигнала от подводного объекта, излучающего звуки на каждый гидроакустический приемник. Данное решение может быть использовано для определения местоположения и перемещений различных подводных объектов, излучающих звуки: морских млекопитающих, подводных аппаратов, источников геологических шумов, и прочих источников звуков биологического, геологического и техногенного характера.
В данном описании использованы следующие термины:
Эквализация – это частотная корректировка звука. То есть принцип эквализации заключается в понижении или повышении уровня громкости определённых частот.
Сигнатура – это минимально достаточная для идентификации источника звука характерная часть его звукового сигнала, или ее представление в той или иной форме.
Способы синхронизации времени:
GPS (Global Positioning System) – Глобальная система позиционирования. Синхронизация времени осуществляется во время определения местонахождения устройства, оснащенного GPS-приёмником. Для этого устройство ловит сигнал со спутников, установленных на околоземной орбите. Каждый из спутников имеет атомные часы, за счет чего система GPS обеспечивает хорошую точность. Минусом данного метода является необходимость в GPS-антенне, сигнал от которой может быть нестабильным.
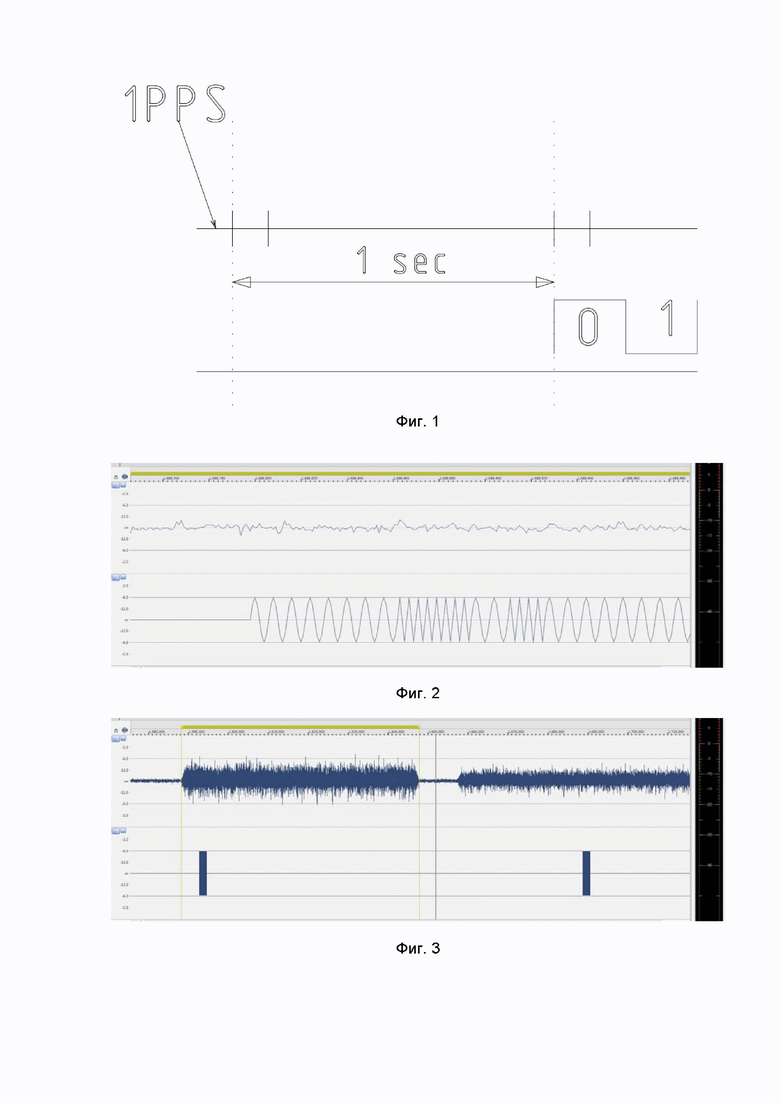
1PPS (1 pulse per second) – Сигнал 1PPS не содержит метки времени. Master-устройство посылает 1 импульс в секунду по отдельной сети: оптоволоконной линии, витой паре или коаксиальному кабелю. Часы Slave используют этот импульс только для синхронизации начала каждой секунды. Устройства не могут с помощью 1PPS получить информацию по дате и времени, поэтому его чаще всего используют совместно с другими протоколами синхронизации.
Уровень техники
Существуют способы определения местоположения подводных объектов, излучающих звуки, например, известно изобретение «Способ определения местоположения объектов в пассивной системе мониторинга», патент РФ № 2526896, МПК G01S 15/004, при котором используют как минимум два разнесенных гидроакустических приемника, включающих блок оцифровки сигнала, источник питания и блок длительного хранения данных, при помощи указанных гидроакустических приемников производят запись аналогового сигнала от подводного объекта, излучающего звуки на каждый гидроакустический приемник, переводят аналоговый сигнал в цифровой, формируя первый канал записи на каждом гидроакустическом приемнике.
Данный способ является наиболее близким по технической сути и достигаемому техническому результату и выбран за прототип предлагаемого изобретения.
К недостаткам данного способа относится необходимость постоянной связи между разнесенными приемниками, реализуемая, например, при помощи кабеля или по радиоканалу.
Раскрытие изобретения
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить способ определения местоположения подводных объектов, излучающих звуки, позволяющий, по меньшей мере, сгладить, как минимум, один из указанных выше недостатков, а именно обеспечить отсутствие необходимости постоянной связи между разнесенными гидроакустическими приемниками, что и является задачей настоящего изобретения.
Для достижения этой цели способ определения местоположения подводных объектов, излучающих звуки, характеризуется по существу тем, что дополнительно способ включает в себя следующие этапы:
на каждом гидроакустическом приемнике формируют два канала, в первый канал записывают оцифрованный сигнал от подводного объекта,
во второй канал на каждом гидроакустическом приемнике записывают сигналы точного времени от приемника глобальной навигационной спутниковой системы, в котором выделен специализированный сигнал 1PPS, синхронизированный с общими часами, и метаданные, включающие географическое положение – долготу и широту - точки регистрации,
в первом канале на каждом гидроакустическом приемнике выделяют интересующие сигнатуры,
сопоставляют выделенные сигнатуры на записях, сделанных при помощи разных точек регистрации,
определяют местоположение подводного объекта, излучающего звуки, по географическому положению точек регистрации при помощи разностно-дальномерного метода по совпадению выделенных сигнатур с разных гидроакустических приемников.
Благодаря данным выгодным характеристикам появляется возможность определять местоположение подводного объектов путем определения соответствия сигнатур на записях, сделанных при помощи разных точек регистрации при отсутствии необходимости постоянной связи между разнесенными гидроакустическими приемниками.
Существует такой вариант изобретения, при котором во второй канал на каждом гидроакустическом приемнике метаданные записывают при помощи одного из способов модуляции, устойчивого к разным способам сжатия звуковых данных и эквализации.
Благодаря данным выгодным характеристикам появляется возможность сжатия и эквализации звуковых данных.
Существует еще один вариант изобретения, при котором данные от гидроакустических приемников передают в управляющую систему, которая включает в себя вычислительный модуль, обеспечивающий автоматическое детектирование требуемых сигнатур.
Благодаря данным выгодным характеристикам появляется возможность автоматического детектирования требуемых сигнатур.
Существует и такой вариант изобретения, в котором управляющая система передает по радио или по кабелю либо идентификатор сигнатуры и метаданные, либо выделенный кусок сигнала, то есть как минимум два канала – сигнал и метаданные.
Благодаря данным выгодным характеристикам появляется возможность проводить длительный мониторинг акваторий, отслеживать появление и перемещение подводных источников звука (морских млекопитающих, различных геологических и техногенных источников), как в пост-обработке, так и в реальном времени, в зависимости от конфигурации системы. Количество точек записи ничем не ограничивается и позволяет строить различные мониторинговые системы с учетом специфики конкретного района.
Совокупность существенных признаков предлагаемого изобретения неизвестна из уровня техники для способов аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения в отношении способа. Кроме того, данное решение неочевидно для специалиста в данной области.
Краткое описание чертежей
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
- фигура 1 изображает общую схему записи метаданных, согласно изобретению,
- фигура 2 изображает фрагмент двухканальной записи звукового сигнала (верхний канал) и метаданные (нижний канал), согласно изобретению,
- фигура 3 изображает фрагмент записи в более крупном масштабе, где можно видеть две соседних записи метаданных, согласно изобретению.
На фигуре 1 показана общая схема записи метаданных: по внутренним часам блока записи регистрируется момент возникновения сигнала 1PPS от приемника спутниковой навигационной системы, а фактическая запись данных в дополнительный канал осуществляется через период сигнала точного времени (1 секунда), так как в течение этой секунды приемник передает навигационные данные, а блок записи декодирует их.
На фигуре 2 показан фрагмент записи, на которой в верхнем канале представлен сигнал с гидроакустического приемника, а в нижнем – метаданные (данные о географическом положении, записанные синхронно с сигналом 1PPS при помощи частотной манипуляции).
На фигуре 3 показан фрагмент записи в более крупном масштабе, где можно видеть две соседних записи метаданных.
Кроме того, точка регистрации может содержать вычислительный модуль, обеспечивающий автоматическое детектирование требуемых сигнатур, и модуль связи (в том числе спутниковой), посредством которого интересующая часть записи с привязкой ко времени автоматически или по требованию передается в управляющую систему. При получении управляющей системы таких частей с разных точек регистрации, она определяет местоположение источника звука.
Точка регистрации содержит массив приемников звука (гидроакустических приемников, микрофонов), и количество каналов в цифровой записи, как минимум, соответствует количеству приемников плюс один, в который записываются как минимум метки времени. Также в качестве метаданных в дополнительный канал может записываться географического положение точки приема, ориентация массива приемников относительно сторон света и/или горизонтали, для чего точка регистрации снабжается датчиком курса и датчиком горизонтали(вертикали).
Осуществление изобретения
Способ определения местоположения подводных объектов, излучающих звуки, работает следующим образом. Приведем наиболее исчерпывающий пример реализации изобретения. Имея в виду, что данный пример не ограничивает применения изобретения.
Этап 1. Параллельно цифровой записи в первый канал звукового аналогового сигнала, получаемого от гидроакустического приемника (или микрофона), во второй канал записывают сигналы точного времени от приемника GNSS (Глобальной навигационной спутниковой системы).
Этап 2. Приемники GNSS имеют специализированный сигнал 1PPS, синхронизированный с общими часами системы с точностью порядка 20 нс у современных приемников и передающийся с частотой 1 Гц.
Этап 3. Сигнал 1PPS выдается навигационным приемником в начале каждой секунды, после чего приемники обычно передают выработанные навигационные данные.
Этап 4. Метаданные записываются во второй звуковой канал при помощи одного из способов модуляции, устойчивого к разным способам сжатия звуковых данных и эквализации (компрессия, изменение громкости, разрядности и т.п.), например – при помощи частотной манипуляции (FSK).
Этап 5. Решают задачу об определении географического местоположения подводных объектов, излучающих звуки, для чего помимо точной привязки ко времени, используют как минимум широту и долготу точки регистрации.
Промышленная применимость
Предлагаемый способ определения местоположения подводных объектов, излучающих звуки, может быть осуществлен специалистом на практике и при осуществлении обеспечивают реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
В соответствии с предложенным изобретением был опробован способ определения местоположения подводных объектов, излучающих звуки.
Испытания показали, что способ обеспечивает возможность отсутствия необходимости постоянной связи между разнесенными гидроакустическими приемниками.
Дополнительным полезным техническим результатом заявленного изобретения является то, что достигается универсализация: так как записывается просто сигнал в звуковой файл по сути, то его можно обрабатывать стандартными средствами, хранить, передавать и т.п. как обычный звук.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ позиционирования автономного подводного аппарата в глубоком море | 2022 |
|
RU2792922C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| Абонентский приемник в составе гидроакустической системы позиционирования большой дальности для глубокого моря | 2022 |
|
RU2789636C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599902C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2018 |
|
RU2691212C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
Данное изобретение относится к способу определения местоположения подводных объектов, излучающих звуки, при котором используют как минимум два разнесенных гидроакустических приемника, при помощи которых производят запись аналогового сигнала от подводного объекта, излучающего звуки на каждый гидроакустический приемник. Данное решение может быть использовано для определения местоположения и перемещений различных подводных объектов, излучающих звуки: морских млекопитающих, подводных аппаратов, источников геологических шумов, и прочих источников звуков биологического, геологического и техногенного характера. Согласно изобретению на каждом гидроакустическом приемнике формируют два канала, в первый канал записывают оцифрованный сигнал от подводного объекта, во второй канал на каждом гидроакустическом приемнике записывают сигналы точного времени от приемника глобальной навигационной спутниковой системы, в котором выделен специализированный сигнал 1PPS, синхронизированный с общими часами, и метаданные, включающие географическое положение – долготу и широту точки регистрации, в первом канале на каждом гидроакустическом приемнике выделяют интересующие сигнатуры, сопоставляют выделенные сигнатуры на записях, сделанных при помощи разных точек регистрации, определяют местоположение подводного объекта, излучающего звуки, по географическому положению точек регистрации при помощи разностно-дальномерного метода по совпадению выделенных сигнатур с разных гидроакустических приемников. Достигаемый технический результат – отсутствие необходимости постоянной связи между разнесенными гидроакустическими приемниками. 3 з.п. ф-лы, 3 ил.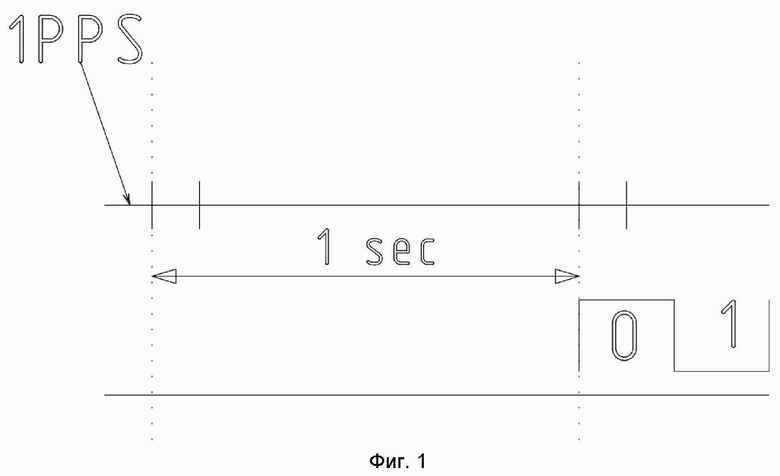
1. Способ определения местоположения подводных объектов, излучающих звуки, при котором
используют как минимум два разнесенных гидроакустических приемника, включающих блок оцифровки сигнала, источник питания и блок длительного хранения данных,
при помощи указанных гидроакустических приемников производят запись аналогового сигнала от подводного объекта, излучающего звуки на каждый гидроакустический приемник,
переводят аналоговый сигнал в цифровой, формируя первый канал записи на каждом гидроакустическом приемнике,
отличающийся тем, что
на каждом гидроакустическом приемнике формируют два канала, в первый канал записывают оцифрованный сигнал от подводного объекта,
во второй канал на каждом гидроакустическом приемнике записывают сигналы точного времени от приемника глобальной навигационной спутниковой системы, в котором выделен специализированный сигнал 1PPS, синхронизированный с общими часами, и метаданные, включающие географическое положение – долготу и широту точки регистрации,
в первом канале на каждом гидроакустическом приемнике выделяют интересующие сигнатуры,
сопоставляют выделенные сигнатуры на записях, сделанных при помощи разных точек регистрации,
определяют местоположение подводного объекта, излучающего звуки, по географическому положению точек регистрации при помощи разностно-дальномерного метода по совпадению выделенных сигнатур с разных гидроакустических приемников.
2. Способ по п.1, отличающийся тем, что во второй канал на каждом гидроакустическом приемнике метаданные записывают при помощи одного из способов модуляции, устойчивого к разным способам сжатия звуковых данных и эквализации.
3. Способ по п.1, отличающийся тем, что данные от гидроакустических приемников передают в управляющую систему, которая включает в себя вычислительный модуль, обеспечивающий автоматическое детектирование требуемых сигнатур.
4. Способ по п.3, отличающийся тем, что управляющая система передает по радио или по кабелю либо идентификатор сигнатуры и метаданные, либо выделенный кусок сигнала, то есть как минимум два канала – сигнал и метаданные.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ В ПАССИВНОЙ СИСТЕМЕ МОНИТОРИНГА | 2013 |
|
RU2526896C1 |
| CN 112415471 A, 26.02.2021 | |||
| CN 111948607 A, 17.11.2020 | |||
| СПОСОБ НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599902C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |

