Изобретение относится к области измерительной техники, в частности к контролю профилей поверхности трехмерных протяженных объектов, и, в частности, может быть использовано в оперативном контроле железнодорожных рельсов.
Известно устройство автоматического контроля прямолинейности сварных стыков рельсов и способ его использования, описанные в патенте РФ № 2520884 «Устройство автоматического контроля прямолинейности сварных стыков рельсов и способ его использования» (приор. 05.03.2013, опубл. 27.06.2014). Устройство содержит корпус, механическую часть, торцевые панели, бесконтактные датчики базирования, датчики бесконтактного измерения расстояния до поверхности рельса и электронный блок.
Недостатком известного устройства является его малое быстродействие, связанное с тем, что устройство является ручным, требующим непосредственного контакта с головкой рельса.
Известен «Лазерный профилометр для определения геометрических параметров профиля поверхности», описанный в патенте РФ № 2650840 (приор. 27.12.2016, опубл. 17.04.2018), который содержит источник лазерного излучения с преобразователем лазерного пучка в линию, оптический матричный приемник отраженного излучения и устройство обработки информации. При этом источник лазерного излучения выполнен в виде полупроводникового лазера, работающего в импульсном режиме со встроенной системой стабилизации температуры, а по ходу отраженного луча перед оптическим матричным приемником введен по крайней мере один узкополосный интерференционный светофильтр.
Недостатком известного лазерного профилометра является то, что устройство регистрирует профили поверхности объекта в поперечном сечении, а не вдоль объекта контроля.
Наиболее близким к заявляемому устройству по технической сущности и достигаемому результату и выбранным в качестве прототипа является устройство, описанное в статье Gazafrudi S.M.M., Younesian D., Torabi M.A high accuracy and high speed imaging and measurement system for rail corrugation inspection // IEEE Transactions on Industrial Electronics. - 2020. - Т. 68. - №. 9. - С. 8894-8903. Измерительная система прототипа состоит из цифровой камеры с матричным приемником излучения и объективом для получения изображения, трех лазерных излучателей, проецирующих три лазерных линии на поверхность рельса, и системы цифровой обработки. В основе схемы регистрации лежит принцип лазерной триангуляции. При этом на объект контроля профиля поверхности проецируется несколько полос, причем полосы проецируются вдоль объекта контроля. Регистрация изображений происходит в широком поле, что позволяет получить информацию о неровности в одном кадре.
Недостатком этого устройства является низкая скорость движения путеизмерительного вагона, на котором оно установлено.
В основу изобретения поставлена задача создания устройства, позволяющего регистрировать изображения полос, проецируемых на контролируемую поверхность, с высокой частотой без потери точности измерений. При этом достигаемым техническим результатом является достижение высокой скорости относительного движения объекта контроля и предлагаемого в изобретении устройства контроля профиля поверхности протяженных объектов. В частности, предлагаемое изобретение позволяет значительно повысить скорость движения путеизмерительного вагона относительно рельсов, поверхность которых контролирует путеизмерительный вагон. Скорость контроля позволяет использовать вагон в составе обычного поезда, что в свою очередь позволяет не создавать специальных технологических окон в расписании движения поездов.
Поставленная задача решается, а технический результат достигается тем, что устройство контроля профиля поверхности протяженных объектов содержит лазерный источник подсветки транспаранта для формирования на объекте контроля картины в виде набора полос, объектив, предназначенный для проецирования изображения полос на приемник, и блок обработки получаемых данных. Причем приемник выполнен в виде линейной камеры. При этом перед объективом установлен оптический клин с возможностью вращения вокруг визирной оси, позволяющий осуществить параллельное смещение регистрируемого изображения в процессе юстировки устройства перед его применением. Пространство изображений камеры располагается таким образом, чтобы в поле зрения попадал весь набор полос, ориентированных вдоль оси объекта контроля.
В качестве приемника излучения возможно использование ПЗС-приемника. В другом варианте возможно использование КМОП-приёмника.
Использование в устройстве в качестве приемника линейной камеры позволяет достигать частоту регистрации изображений полос в виде сечений распределения яркости пространства предметов более 40 кГц. Это, в свою очередь, позволяет регистрировать изображения поперечных сечений поверхности объекта контроля, отстоящих на расстояние порядка 1 мм, при относительной скорости перемещения 40 м/с.
При этом для правильной работы устройства линейная камера должна быть расположена таким образом, чтобы в поле ее зрения попадал весь набор полос, который при регистрации линейной камерой представляет собой набор пятен. Взаимное положение изображений набора полос содержит информацию о профиле поверхности объекта контроля в сечении, перпендикулярном его оси. Для получения в поле зрения приемника всего набора полос при установке устройства, например, на путеизмерительном вагоне, в процессе юстировки используют оптический клин, устанавливаемый перед объективом линейной камеры.
Использование ПЗС-приемника либо использование КМОП-приемника в настоящее время позволяет достичь регистрации изображений набора полос в виде сечений распределения яркости пространства предметов с частотой более 40 кГц, что в свою очередь позволяет достичь работы устройства контроля профиля протяженных объектов при относительном перемещении объекта контроля со скоростью до 140 км/час, то есть достичь заявленный технический результат.
В последующем заявляемое изобретение поясняется подробным описанием конкретного, но не ограничивающего настоящее решение, примера его выполнения и прилагаемыми чертежами, на которых:
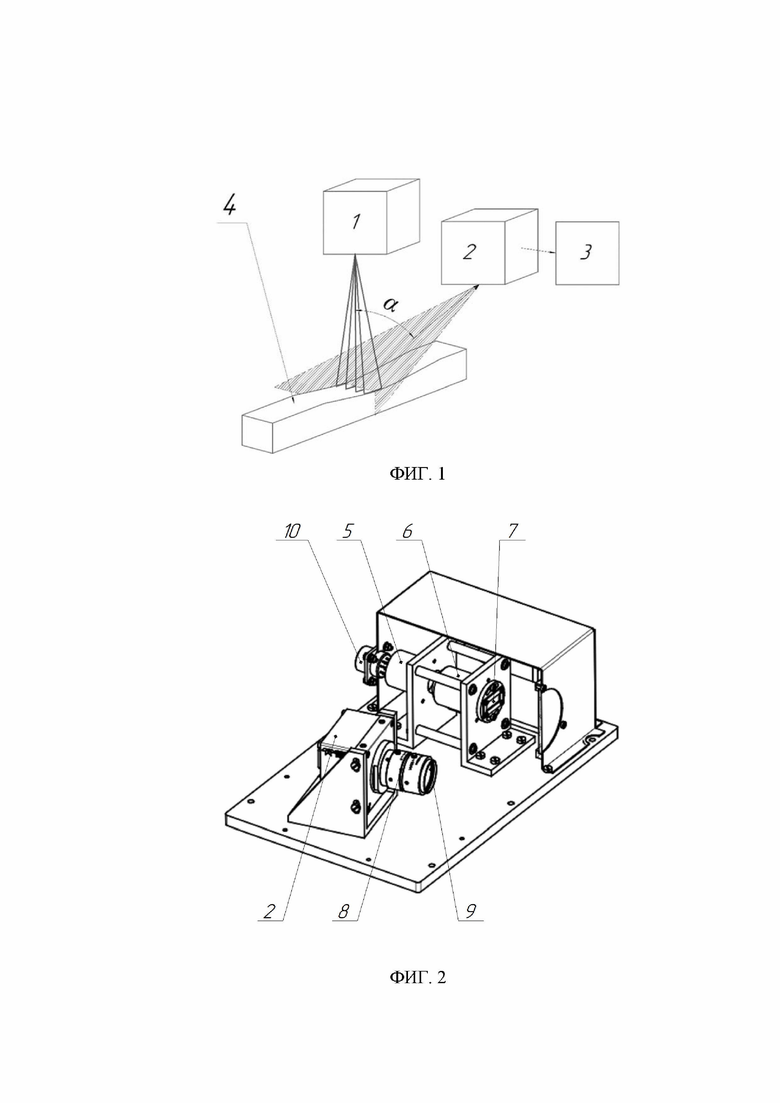
Фиг. 1 - представлена функциональная схема устройства контроля профиля поверхности протяженных объектов;
Фиг. 2 - вариант выполнения устройства контроля профиля поверхности протяженных объектов;
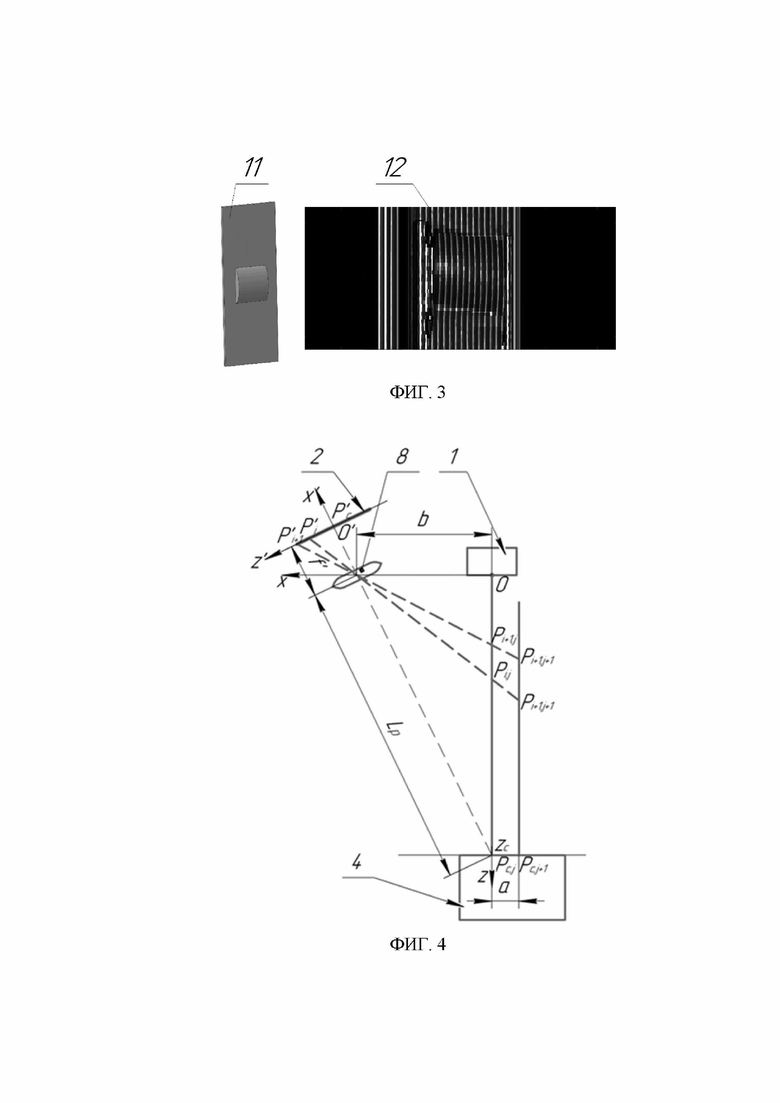
Фиг. 3 - представлен пример тест-объекта и изображения тест-объекта на поверхности, получаемого линейной камерой;
Фиг. 4 - схема регистрации изображений в устройстве контроля профиля поверхности протяженных объектов.
На фиг. 1. представлена функциональная схема устройства контроля профиля поверхности протяженных объектов. В основу принципа действия этого устройства положен триангуляционный метод. Для регистрации изображений используется камера 2 линейного сканирования, в дальнейшем называемая линейная камера 2. Визирная ось линейной камеры 2 составляет параллаксный угол α с визирной осью проектора 1. Формируемый проектором набор полос, ориентированных вдоль рельса 4 регистрируется линейной камерой 2. Зарегистрированное изображение передается в блок обработки 3, где происходит дальнейшая обработка. Устройство устанавливают, например, на подрессоренную часть вагона-путеизмерителя таким образом, чтобы объект контроля - рельс 4 находился в поле зрения линейной камеры 2. При относительном движении вагона производится регистрация относительного положения сечений поверхности рельса 4, которые в дальнейшем используются для оценки неровностей на объекте.
Пример реализации устройства, например, на путеизмерительном вагоне представлен на фиг. 2. Лазерный проектор 1 может быть реализован на основе полупроводникового лазера 5, например, ATC-C5000-200, коллимирующей оптической системы 6 и транспаранта 7. Коллимирующая оптическая система 6 может представлять собой коллиматорную линзу, которая предназначена для фокусировки луча на требуемом расстоянии. Транспарант 7 представляет собой дифракционный оптический элемент, например, дифракционную решетку. Сколлимированный лазерный пучок, пройдя через транспарант 7, формирует картину в виде параллельных полос на рабочем расстоянии. Транспарант 7 имеет возможность поворота для юстировки устройства. Отраженное от рельса излучение проецируется на приемник излучения линейной камеры 2 посредством объектива 8 с установленным перед ним оптическим клином 9. В примере реализации угол преломления оптического клина 9 составляет 1°, сам клин 9 имеет возможность поворота вокруг визирной оси объектива 8, осуществляя тем самым параллельное смещение изображения. Зарегистрированное камерой 2 изображение передается в блок обработки информации через разъем 10. В блоке обработки информации, представляющем собой микрокомпьютер, происходит анализ контура рельса, по результатам которого может быть вычислена величина неровности. Микрокомпьютер может быть установлен непосредственно внутри устройства, тогда вычисленные результаты могут быть переданы через разъем 10 для дальнейшей обработки.
Для пояснения работы заявляемого изобретения на фиг. 3 представлен пример тест-объекта, используемого при юстировке устройства контроля профиля поверхности протяженных объектов, и его изображение, получаемое линейной камерой. Представленный пример тест-объекта 11 представляет собой плоскость с возвышением известного размера. Проектор 1 формирует набор полос на тест-объекте 11, а изображение 12, зарегистрированное линейной камерой 2 представляет собой набор пятен, положение изображений которых в каждой строке изображения содержит информацию о положении поверхности тест-объекта 11 вдоль визирной оси линейной камеры 2. По искривлениям полос на тест-объекте 11 можно судить о величине неровности на объекте за счет последующей обработки.
Схема регистрации изображений в устройстве контроля профиля поверхности протяженных объектов представлена на фиг. 4. Ось пучка излучения проектора 1 лежит на оси 0z главной системы координат xyz, начало которой совпадает с узловой точкой коллимирующей оптической системы 6 проектора 1. В точке Pc=P(0,0,zc) пересекаются визирные оси проектора 1 и линейной камеры 2, где 
где T и Ry(α) - линейные операторы, которые описываются матрицами переноса и поворота соответственно.
Период между полосами, формируемыми проектором принят равным a. Полоса, формируемая проектором 1, с номером j в главной системе координат xyz лежит на прямой:
уравнение прямой, соединяющей точку Pi,j с координатой zi,j в пространстве предметов и узловой точкой объектива 8 линейной камеры 2, имеет вид:
Решение системы уравнений (2) и (3) с учетом (1), дает координаты точки пересечения прямых, соответствующих положению изображения точки Pi,j(x*i,j; z*i,j), что позволяет получить координату изображения точки Pi,j на чувствительных элементах линейной камеры 2 в системе координат x’y’z’:

Таким образом, используя представленные выше формулы можно вычислить координату изображения любой точки на приемнике излучения, которая в дальнейшем может использоваться для определения профиля контролируемого объекта.
Мониторинг состояния железнодорожного пути широко применятся для обеспечения безопасности движения поездов. Путеизмерительный вагон может работать на перегоне как один, ведомый локомотивом, так и в составе обычных пассажирских поездов. Указанная реализация устройства контроля профиля поверхности протяженных объектов может быть использована в работе при движении путеизмерительных вагонов с требуемой скоростью без потери точности измерений по сравнению с другими устройствами контроля профиля железнодорожных рельсов.
Заявляемое изобретение обеспечивает достижение технического результата - достижение высокой скорости относительного движения объекта контроля и предлагаемого в изобретении устройства контроля профиля поверхности протяженных объектов и работы устройства контроля профиля поверхности протяженных объектов при относительном перемещении объекта контроля со скоростью до 140 км/час, что позволяет использовать вагон в составе обычного поезда и исключает необходимость создания специальных технологических окон в расписании движения поездов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров геометрии рельсовой колеи и система для его осуществления | 2018 |
|
RU2686341C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ДВИЖУЩИХСЯ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 2024 |
|
RU2837941C1 |
| Система для контроля геометрии рельсового пути | 2022 |
|
RU2784216C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ И РАСПОЗНАВАНИЯ ПОВЕРХНОСТЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199718C1 |
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2066645C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199717C2 |
| СПОСОБ ПОСТРОЕНИЯ ПРОФИЛЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2091710C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1999 |
|
RU2148793C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДЕФОРМАЦИЙ ПРОТЯЖЕННОГО ОБЪЕКТА | 2010 |
|
RU2445572C1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
Изобретение относится к области измерительной техники, к контролю профилей поверхности трехмерных протяженных объектов, может быть использовано в оперативном контроле железнодорожных рельсов. Устройство контроля профиля протяженных объектов содержит лазерный источник подсветки транспаранта для формирования на объекте контроля картины в виде набора полос, объектив, приемник, выполненный в виде линейной камеры, и блок обработки получаемых данных. Перед объективом установлен оптический клин с возможностью вращения вокруг визирной оси. Пространство изображений камеры располагается таким образом, чтобы в поле зрения попадал весь набор полос. Технический результат - достижение высокой скорости относительного движения объекта контроля и устройства контроля профиля поверхности протяженных объектов. 2 з.п. ф-лы, 4 ил.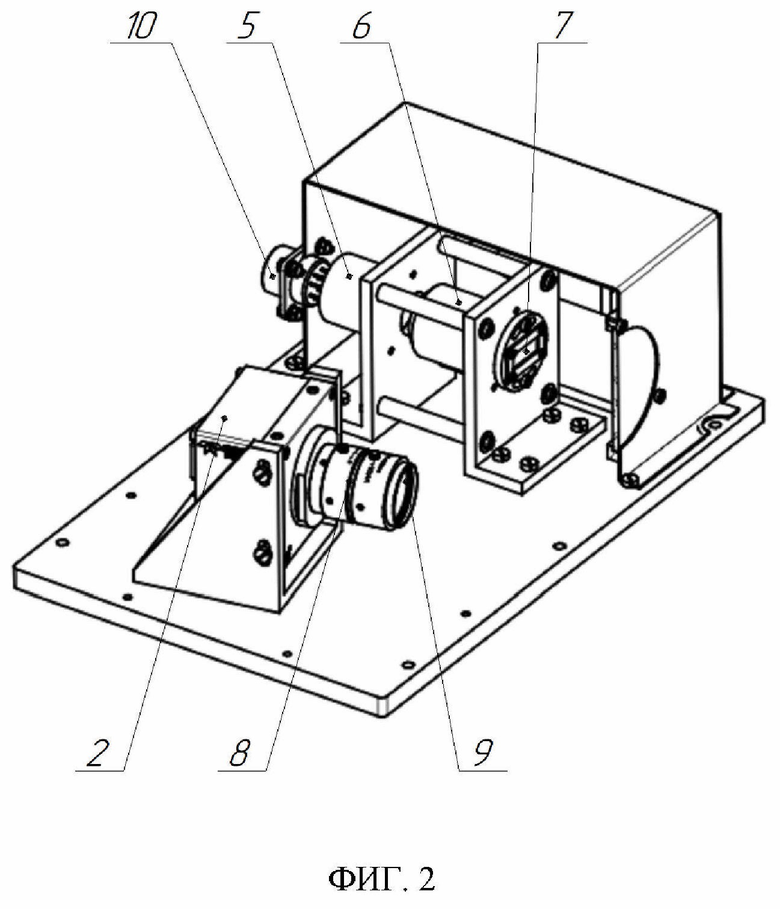
1. Устройство контроля профиля протяженных объектов, содержащее лазерный источник подсветки транспаранта для формирования на объекте контроля картины в виде набора полос, объектив, предназначенный для проецирования изображения полос на приемник, и блок обработки получаемых данных, отличающееся тем, что приемник выполнен в виде линейной камеры, при этом перед объективом установлен с возможностью вращения вокруг визирной оси оптический клин, позволяющий осуществить параллельное смещение регистрируемого изображения в процессе юстировки устройства перед его применением, а пространство изображений камеры располагается таким образом, чтобы в поле зрения попадал весь набор полос, ориентированных вдоль объекта контроля.
2. Устройство контроля прямолинейности протяженных объектов по п.1, отличающееся тем, что в качестве приемника используется ПЗС-приемник.
3. Устройство контроля прямолинейности протяженных объектов по п.1, отличающееся тем, что в качестве приемника используется КМОП-приёмник.
| Gazafrudi S.M.M., Younesian D., Torabi M | |||
| A high accuracy and high speed imaging and measurement system for rail corrugation inspection // IEEE Transactions on Industrial Electronics | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| - Т | |||
| Способ получения смеси хлоргидратов опийных алкалоидов (пантопона) из опийных вытяжек с любым содержанием морфия | 1921 |
|
SU68A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Пневматическая шина для велосипедных и подобных им колес | 1926 |
|
SU8894A1 |
| RU 92009043 A, 27.03.1995 | |||
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ СВАРНЫХ СТЫКОВ РЕЛЬСОВ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2013 |
|
RU2520884C1 |
| ЛАЗЕРНЫЙ ПРОФИЛОМЕТР ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПРОФИЛЯ ПОВЕРХНОСТИ | 2016 |
|
RU2650840C1 |
| WO 2022013690 A1, 20.01.2022 | |||
| Колючкин В.Я., | |||

