Изобретение относится к области морского приборостроения и может использоваться для определения координат текущего положения центра качания судна на качке.
Положение центра качания судна при качке на волнении обусловлено равнодействующим моментом приложенных к судну сил, включающих силу веса, силу плавучести и силу инерции. Необходимость в определении центра качания судна возникает в связи с тем, что ряд навигационных приборов, как указано в требованиях на их размещение, должен устанавливаться вблизи центра качания судна. К числу таких приборов относятся бесплатформенные системы ориентации, измеряющие угловую и вертикальную качку судна, например, "IMU Motion Sensors" фирмы Ship Motion Control (Мальта), "Motion reference unit" фирмы Kongsberg Seatex AS (Норвегия), "Ellipse" фирмы SBG System (Франция), "Мининавигация" АО «Концерн "ЦНИИ "Электроприбор" (Россия) и др. Благодаря такому размещению эти приборы имеют минимальную погрешность и могут правильно вырабатывать параметры качки, необходимые для работы судовых систем. Кроме того, формирование текущей информации о положении центра качания судна является важнейшим и необходимым условием при оценке безопасности судовождения на волнении.
В настоящее время для обеспечения судоводителей информацией, необходимой для поддержки принятия решений, используются автоматизированные системы, которые в том числе выполняют расчёт положения центра тяжести судна. Этот расчёт выполняется на основе информации о расходовании топлива и приёме грузов, вводимых в бортовой вычислитель систем вручную. К числу таких систем относится «Octopus-Dss» фирмы Amarcon BV. Среди отечественных разработок - программы «Гелиос» и Master Load, разработанные ООО «Морской инжиниринговый центр» и ООО «Валком», соответственно. Точность производимых расчётов зависит от корректности введенной вручную информации. Применение этого метода приводит к большим погрешностям в определении координат центров тяжести судов, при этом применение, в частности, таких систем для рыболовецких судов невозможно в связи с недостатком информации о весе улова.
Известно техническое решение, приведенное в статье [Куркова О.П. Автоматизированная система мониторинга фактической остойчивости судна в условиях рейса // Журнал E-Scio, 2020, №8 (47), C.240-254], в которой представлена автоматизированная информационно-измерительная система, которая позволяет определять текущее положение центра масс судна при его движении. Это техническое решение принято за прототип. Очевидно, что при описании технического решения происходит подмена понятий - центр качания судна подменяется на термин центр масс судна. Известно, что в общем случае центр качания не совпадает с центром масс судна при его полигармонической качке. Считается, что центр качания находится между плоскостью ватерлинии и центром масс судна, причём с увеличением периода бортовой качки центр качания приближается к ватерлинии [Абатуров С.Б., Алексеев С.В. Вакс А.И., Дубакин В.А., Куров Б.Н. Определение параметров статической осадки плавсредства в реальных условиях эксплуатации // Тр. ЦНИИ им. акад. А.Н. Крылова, 1997, вып. 6(290)].
Анализируя алгоритм работы, можно утверждать, что предложенная в прототипе информационно-измерительная система используется для определения текущего положения центра качания судна. Пример канала информационно-измерительной системы прототипа включает установленные в двух точках контроля - в носовой и кормовой части судна, при известном расстоянии L между ними, - инерциальные приборы (датчики) измерения параметров линейных и угловых перемещений типа MRU (Motion reference unit) для измерения угловых перемещений по углам дифферента, крена, рыскания, а также бесплатформенную инерциальную навигационную систему (БИНС), в состав которой входит гравиметр.
Для определения центра качания судна в прототипе предлагается использовать измеряемые акселерометрами и гироскопами MRU составляющие кажущегося ускорения и угловой скорости судна, значения углов дифферента и крена в соответствующих точках контроля, а также составляющие линейного ускорения, вырабатываемые БИНС и значение ускорения силы тяжести, определяемое в реальном времени с помощью гравиметра. В качестве примера в прототипе приведены формульные зависимости для определения расстояния между центром качания и точкой контроля вдоль продольной оси судна.
К недостаткам прототипа можно отнести:
• наличие значительного числа приборов первичной информации:
- 6 приборов MRU (по 2 прибора на каждую ось). В каждый прибор MRU входит, либо триада микромеханических гироскопов (ММГ) и триада микромеханических акселерометров (ММА) с взаимно ортогональными осями чувствительности, либо - к 3 ММГ и 3 ММА добавлены еще 3 магнитометра с взаимно ортогональными осями чувствительности;
- судовой БИНС, в состав которой входит гравиметр,
требующих выполнения большого объёма вычислений, что усложняет и удорожает предложенную информационно-измерительную систему;
• рассмотрение только частного случая задания положения центра качания вдоль продольной оси судна (рис.1 прототипа), для которого характерны нулевые значения координат по двум другим осям и, следовательно, вывод упрощенных выражений для определения расстояния от точки контроля до центра качания (в прототипе обозначается М).
При этом в одном из выражений для М составляющая линейного ускорения  в центре качания (выражение (3) в прототипе) может быть выработана только в БИНС, установленной непосредственно в центре качания, а это не соответствует месту установки БИНС в прототипе.
в центре качания (выражение (3) в прототипе) может быть выработана только в БИНС, установленной непосредственно в центре качания, а это не соответствует месту установки БИНС в прототипе.
Решаемая техническая проблема - совершенствование способа определения координат центра качания судна в условиях качки путём применения в схеме измерения последовательности действий, основанной на использовании разностных измерений выходных сигналов девяти трехосных микромеханических акселерометров (далее - ММА), установленных в разнесенных на судне точках контроля таким образом, чтобы каждые три из этих ММА были установлены на своей оси ортогональной системы координат 0XYZ, связанной с судном.
Использование предлагаемого способа обеспечит выполнение требований по точности определения координат текущего положения центра качания судна в условиях действия качки, а также повышение достоверности определения этого центра качания.
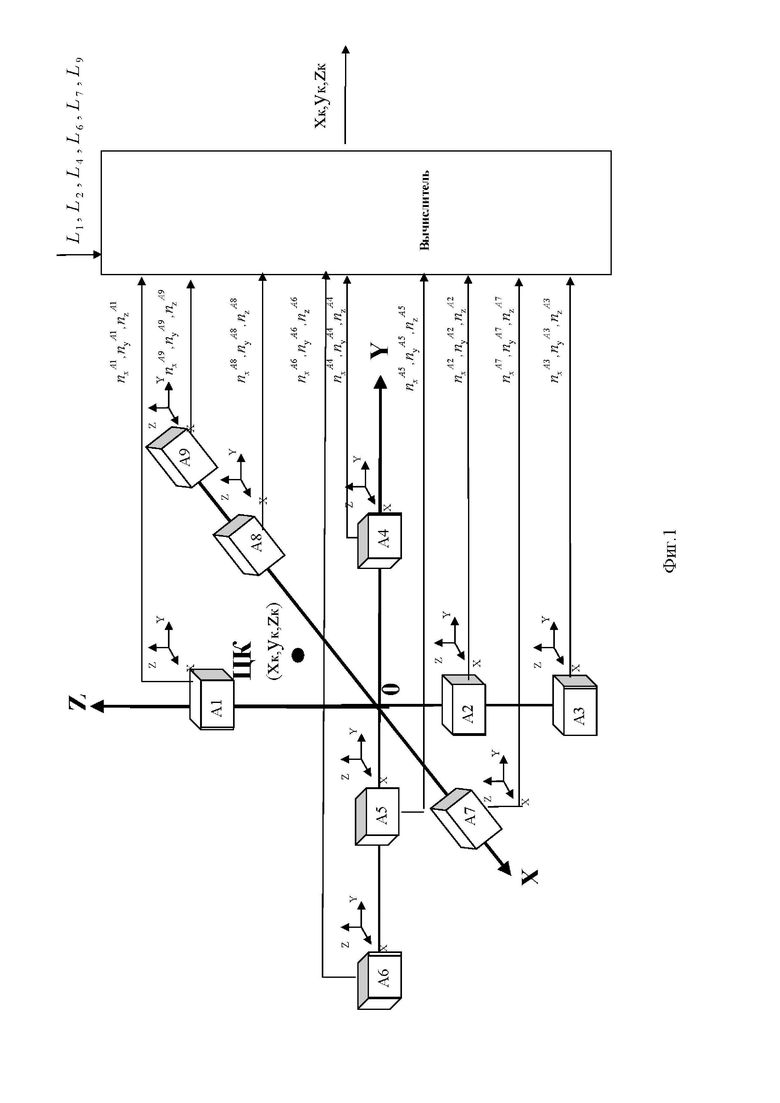
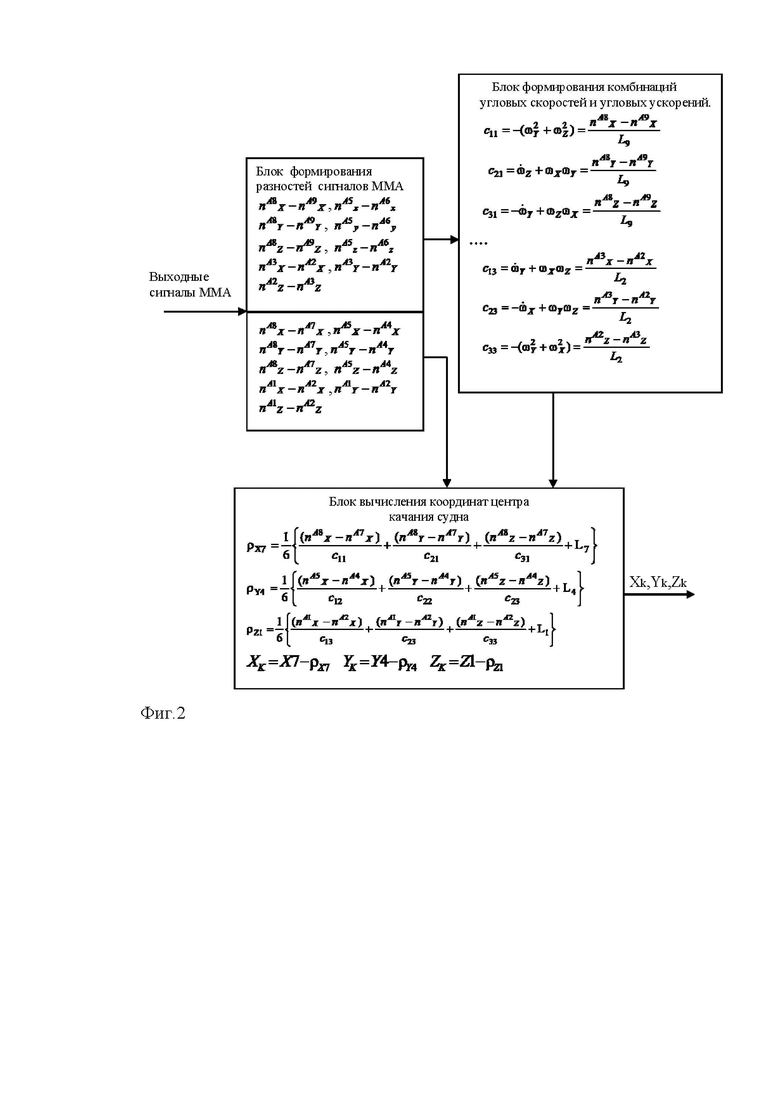
На фиг.1 приведено размещение трехосных ММА по осям системы координат 0XYZ, связанной с судном, на фиг.2 - блок-схема формирования координат центра качания судна.
На фигурах введены следующие обозначения:
А1,A2,…A9. - трехосные ММА;
ЦК - центр качания судна;
Xк,Yк,Zк - координаты ЦК в системе координат 0XYZ, связанной с судном;
L1, L2, L4, L6, L7, L9 - расстояния между ММА A1 и A2, A2 и A3, А4 и А5, А5 и А6, А7 и А8, А8 и А9;
 ;
;  ;
;  ; …;
; …;  - выходные сигналы с осей 0X, 0Y, 0Z ММА A1, A2, A3,…, A9;
- выходные сигналы с осей 0X, 0Y, 0Z ММА A1, A2, A3,…, A9;
 ,
, ,
,  ,
, ,
,  ,
,  ,
,  ,
,  ,
,  - разности соответствующих выходных сигналов ММА А8 и А9, А5 и А6, A2 и A3;
- разности соответствующих выходных сигналов ММА А8 и А9, А5 и А6, A2 и A3;
 ,
, ,
, ,
, ,
, ,
,  ,
,
 ,
, ,
,  - разности соответствующих выходных сигналов ММА А8 и А7, А5 и А4, A1 и A2;
- разности соответствующих выходных сигналов ММА А8 и А7, А5 и А4, A1 и A2;
X7, Y4, Z1 - координаты места размещения ММА A7, A4, А1, соответственно, по осям 0X, 0Y, 0Z системы координат 0XYZ.
В качестве системы координат 0XYZ может быть выбрана следующая (фиг.1):
- ось 0Х образована пересечением горизонтальной плоскости, включающей конструктивную ватерлинию (конструктивная ватерлиния - ватерлиния, соответствующая расчетному водоизмещению судна) и любой вертикальной поперечной плоскости судна, в частности, плоскости мидель-шпангоута,
- ось 0Y - пересечением плоскости конструктивной ватерлинии и диаметральной плоскости судна,
- ось 0Z - пересечением диаметральной плоскости и вертикальной поперечной плоскости судна, в частности, плоскости мидель-шпангоута.
Проекции кажущегося ускорения на оси ортогонального трехгранника 0XYZ в месте установки каждого ММА имеют вид [Анучин О.Н., Емельянцев Г.И. Интегрированные системы ориентации и навигации для морских подвижных объектов // ГНЦ РФ ЦНИИ «Электроприбор», Санкт-Петербург, 2003]:

 (1)
(1)

где  - проекции кажущегося ускорения в центре качания судна, зависящие от линейных ускорений и проекций силы тяжести,
- проекции кажущегося ускорения в центре качания судна, зависящие от линейных ускорений и проекций силы тяжести,
 - проекции угловой скорости судна на оси системы координат 0XYZ;
- проекции угловой скорости судна на оси системы координат 0XYZ;
 - проекции отстояния трехосного ММА от центра качания судна на оси системы координат 0XYZ;
- проекции отстояния трехосного ММА от центра качания судна на оси системы координат 0XYZ;
 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  - комбинации угловых скоростей и угловых ускорений;
- комбинации угловых скоростей и угловых ускорений;
 ,
,  ,
,  - вращательные и центростремительные составляющие кажущегося ускорения, действующие соответственно по осям 0X, 0Y, 0Z системы координат 0XYZ (в дальнейшем будем называть эти ускорения переносными) [Ривкин С.С. Определение линейных скоростей и ускорений качки корабля инерциальным методом. Часть I. Линейные скорости и ускорения качки корабля // ЦНИИ «Румб», 1980].
- вращательные и центростремительные составляющие кажущегося ускорения, действующие соответственно по осям 0X, 0Y, 0Z системы координат 0XYZ (в дальнейшем будем называть эти ускорения переносными) [Ривкин С.С. Определение линейных скоростей и ускорений качки корабля инерциальным методом. Часть I. Линейные скорости и ускорения качки корабля // ЦНИИ «Румб», 1980].
На основании (1) за центр качания принимаем точку на судне, в которой в условиях качки судна отсутствует действие переносных ускорений.
Для реализации способа используется информационно-измерительной система, включающая девять трехосных ММА, каждые три из которых установлены на отдельной оси системы координат 0XYZ, связанной с судном, на известных расстояниях друг от друга, а также вычислительное устройство для выработки координат центра качания.
Способ основан на том, что при установке трех трехосных ММА на каждой оси системы координат 0XYZ с известными расстояниями между ними, могут быть сформированы три разности одноименных выходных сигналов этих ММА, в которых компенсируются кажущиеся ускорения, действующие в центре качания судна (1), а также переносные ускорения, пропорциональные проекциям отстояния (1) на оси системы координат 0XYZ, не совпадающие с осью размещения этих ММА. В полученных разностях выходных сигналов ММА содержится разность отстояний этих ММА от центра качания судна, а именно:
- в первой разности сигналов ММА содержится разность отстояний первого и второго ММА, например  ,
,
- во второй разности сигналов ММА содержится разность отстояний первого и третьего ММА, например,  ,
,
- в третьей разности сигналов ММА содержится разность отстояний третьего и второго ММА  .
.
Поскольку расстояния между ММА известны, то разности , , можно выразить с использованием расстояний между ММА следующим образом:
 ,
, ,
,
 ,
,
где  ,
,  - известные расстояния между первым и вторым ММА, и между вторым и третьим ММА.
- известные расстояния между первым и вторым ММА, и между вторым и третьим ММА.
Таким образом, информация об известных расстояниях между ММА позволяет ввести в разности сигналов трех ММА только одно неизвестное значение (в приведенном выше примере - это  ), представляющее отстояние первого из ММА от центра качания, и при этом, в одной из полученных трех разностей это неизвестное значение будет скомпенсировано.
), представляющее отстояние первого из ММА от центра качания, и при этом, в одной из полученных трех разностей это неизвестное значение будет скомпенсировано.
Так, разности выходных сигналов X - осей каждой пары ММА из трех акселерометров, установленных по оси 0Z системы координат 0XYZ (фиг.1), имеют следующий вид:
 =
= ,
,
 (2)
(2)

где  - отстояния по оси OZ соответственно акселерометров A1, A2, A3 от центра качания судна (фиг.1),
- отстояния по оси OZ соответственно акселерометров A1, A2, A3 от центра качания судна (фиг.1),  ,
, - известные расстояния между акселерометрами A1 и A2, A2 и A3 (фиг.1).
- известные расстояния между акселерометрами A1 и A2, A2 и A3 (фиг.1).
Правая часть третьего уравнения в (2) для разности  представляет произведение известного расстояния между ММА
представляет произведение известного расстояния между ММА  и неизвестного множителя
и неизвестного множителя  . Следовательно, данное выражение позволяет вычислить этот множитель:
. Следовательно, данное выражение позволяет вычислить этот множитель:  . Полученное значение множителя
. Полученное значение множителя  далее используется в первом уравнении (2) для вычисления отстояния
далее используется в первом уравнении (2) для вычисления отстояния  :
:  или
или  .
.
Повторяя приведенную выше процедуру для всех осей трехосных ММА, установленных по осям системы координат 0XYZ, можно получить значения отстояний соответствующих ММА от центра качания судна и, следовательно, определить координаты этого центра качания.
Таким образом, разности одноименных составляющих сигналов девяти ММА, установленных по осям системы координат 0XYZ, используются двояким образом: с помощью одних разностей вычисляются комбинации угловых скоростей и угловых ускорений судна, обуславливающих воздействие переносных ускорений, с помощью других - с учетом полученных комбинаций угловых скоростей и угловых ускорений вычисляются координаты центра качания судна.
Последовательность действий в соответствии с предлагаемым способом:
1. Трехосные ММА размещают по осям системы координат 0XYZ, при этом расстояния между ММА A1 и A2, А4 и А5, А8 и А7 (Фиг.1) в зависимости от водоизмещения судна могут составлять 2 - 4 метра, а расстояния между ММА A3 и A2, А6 и А5, А8 и А9 (Фиг.1) - 1 - 2 метра.
2. Производится вычисление следующих разностей выходных сигналов ММА в блоке формирования разностей сигналов акселерометров (фиг. 2):
установленных по оси OX системы координат 0XYZ:
 ,
, ,
, ,
, ,
, ,
, ;
;
установленных по оси OY системы координат 0XYZ:
 ,
, ,
, ,
, ,
, ,
, ;
;
установленных по оси OZ системы координат 0XYZ:
 ,
, ,
, ,
, ,
, ,
, .
.
3. Производится вычисление всех комбинаций угловых скоростей и угловых ускорений с использованием полученных разностей выходных сигналов ММА A2 и A3, А5 и А6, А8 и А9 (фиг.1) и известных расстояний между ними в блоке формирования комбинаций угловых скоростей и угловых ускорений (фиг.2):
 ,
,
 ,
, (3)
(3)
 ,
,
 ,
, 
где:
 ,
, ,
, - расстояния между ММА A2 и A3, А5 и А6, А8 и А9,
- расстояния между ММА A2 и A3, А5 и А6, А8 и А9,
 ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  - соответствующие комбинации угловых скоростей и угловых ускорений.
- соответствующие комбинации угловых скоростей и угловых ускорений.
4. Производится выработка в блоке вычисления координат центра качания судна текущих значений отстояний соответствующих акселерометров от центра качания судна по осям 0X, 0Y, 0Z с использованием полученных комбинаций угловых скоростей и угловых ускорений и разностей выходных сигналов ММА A1 и A2, А4 и А5, А7 и А8 (фиг.2):

 (4)
(4)

где  - соответственно отстояния по осям 0X,0Y,0Z ММА A7, A4, A1 от центра качания судна;
- соответственно отстояния по осям 0X,0Y,0Z ММА A7, A4, A1 от центра качания судна;
 ,
, ,
, - расстояния между ММА A1 и A2, А4 и А5, А8 и А7 (фиг.1).
- расстояния между ММА A1 и A2, А4 и А5, А8 и А7 (фиг.1).
5. Производится выработка координат центра качания в блоке вычисления координат центра качания судна (фиг.2):

где X7, Y4, Z1 - координаты места размещения ММА A7, A4, А1, соответственно, по осям 0X, 0Y, 0Z системы координат 0XYZ (фиг.1).
Проведено вычисление координат центра качания судна методом компьютерного (имитационного) моделирования при рассмотрении двух вариантов численных значений расстояний между ММА.
1 вариант характеризуется:
- заданием параметров качки судна с амплитудой до 20° и периодом до 20с;
- использованием трехосных ММА с погрешностью определения линейного ускорения на уровне ±10-2 м/с2,
- расстояниями между ММА A2 и A1, A8 и A7, A5 и A4, равными 2м, ошибке определения этого расстояния ±0,02м,
- расстояниями между ММА A2 и A3, A8 и A9, A5 и A6, равными 1м, ошибке определения этого расстояния ±0,01м,
- заданием следующих значений координат X7, Y4, Z1 ММА A7, A4, А1 соответственно по осям 0X,0Y,0Z:  ,
,  ,
,  и погрешностями задания этих координат на уровне ±0,01м.
и погрешностями задания этих координат на уровне ±0,01м.
В результате рассчитанных в соответствии с представленным способом отстояний ММА A7, A4, А1 от центра качания судна:  ,
,  ,
,  , получены следующие значения координат центра качания судна:
, получены следующие значения координат центра качания судна:  = - 0,529м,
= - 0,529м,  = 0,472м,
= 0,472м,  =0,529 м, погрешности вычисления которых не превышают ±0,03м:
=0,529 м, погрешности вычисления которых не превышают ±0,03м:

 ,
,
 ,
,
где  ,
, ,
,  - заданные при моделировании значения координат центра качания судна.
- заданные при моделировании значения координат центра качания судна.
2 вариант характеризуется:
- заданием параметров качки судна с амплитудой до 20° и периодом до 20с;
- использованием трехосных ММА с погрешностью определения линейного ускорения на уровне ±10-2 м/с2,
- расстояниями между ММА A2 и A1, A8 и A7, A5 и A4, равными 4м, ошибке определения этого расстояния ±0,04м,
- расстояниями между ММА A2 и A3, A8 и A9, A5 и A6, равными 2м, ошибке определения этого расстояния ±0,02м,
- заданием следующих значений координат X7, Y4, Z1 ММА A7, A4, А1 соответственно по осям 0X,0Y,0Z:  ,
,  ,
,  и погрешностями задания этих координат на уровне ±0,02м.
и погрешностями задания этих координат на уровне ±0,02м.
В результате рассчитанных в соответствии с представленным способом отстояний ММА A7, A4, А1 от центра качания судна:  ,
,  ,
,  , получены следующие значения координат центра качания судна: = - 0,548м, = 0,475м, =0,539 м, погрешности вычисления которых не превышают ±0,05м:
, получены следующие значения координат центра качания судна: = - 0,548м, = 0,475м, =0,539 м, погрешности вычисления которых не превышают ±0,05м:

 ,
,
 ,
,
где ,, - заданные при моделировании значения координат центра качания судна.
Таким образом, полученные результаты компьютерного моделирования подтверждают достоверность предлагаемого способа определения центра качания судна и возможность вычисления координат центра качания с требуемой точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовой электронный кренодифферентометр | 2023 |
|
RU2817308C1 |
| Способ отождествления целевой информации трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников, располагаемых на качающемся носителе | 2023 |
|
RU2816259C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1997 |
|
RU2119171C1 |
| Катодный узел хронографического электронно-оптического преобразователя | 2021 |
|
RU2777837C1 |
| Способ калибровки электронного магнитного компаса | 2016 |
|
RU2623192C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТАВЛЯЮЩИХ УСКОРЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА ГИРОСКОПА | 1996 |
|
RU2121695C1 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2308004C1 |
| Устройство для определения динамических наклонений морского судна на качке | 1987 |
|
SU1525461A1 |
| СПОСОБ ДИАГНОСТИКИ СТЕПЕНИ ВИБРАЦИОННОЙ БОЛЕЗНИ | 2007 |
|
RU2337363C1 |
| МАГНИТОСФЕРИЧЕСКИЙ ГИРОСКОП | 1997 |
|
RU2126135C1 |
Изобретение относится к способу определения центра качания судна. Для этого устанавливают три трехосных микромеханических акселерометра на каждой из осей связанной с судном системы координат 0XYZ, по данным которых формируют в вычислительном устройстве разности одноименных составляющих их сигналов, вычисляют комбинации угловых скоростей и угловых ускорений судна, с помощью которых определяют координаты центра качания судна определенным образом. Обеспечивается повышение точности определения координат текущего положения центра качания судна в условиях действия качки, а также повышение достоверности определения этого центра качания. 2 ил.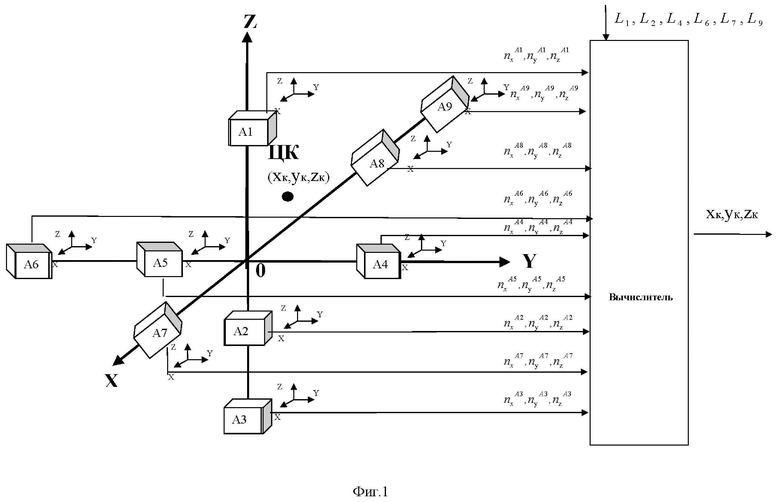
Способ определения центра качания судна, за который принимается точка, в которой отсутствует действие переносных ускорений при качке судна, заключающийся в использовании информационно-измерительной системы, включающей инерциальные датчики, размещенные в разнесенных на судне точках установки с известными расстояниями между ними, и вычислительное устройство для выработки координат центра качания, отличающийся тем, что по данным трех трехосных микромеханических акселерометров (ММА), установленных на каждой оси системы координат 0XYZ, связанной с судном, в вычислительном устройстве формируются разности одноименных составляющих сигналов этих ММА, вычисляются комбинации угловых скоростей и угловых ускорений судна, с использованием полученных комбинаций определяются координаты центра качания судна.
| ШАРНИРНОЕ СОЕДИНЕНИЕ ТРУБ | 0 |
|
SU163855A1 |
| Судовой электронный кренодифферентометр | 2023 |
|
RU2817308C1 |
| Устройство для определения динамических наклонений морского судна на качке | 1987 |
|
SU1525461A1 |
| EP 3486742 B1, 16.06.2021 | |||
| JP 2017021029 A, 26.01.2017. | |||

