Изобретение относится к области навигации и предназначено для определения местоположения и ориентации различных объектов, в том числе и беспилотных летательных аппаратов, относительно источника переменного вращающегося низкочастотного магнитного поля. Предлагаемая система навигации может быть использована в качестве резервной в условиях нарушения работы или выходе из строя штатных систем навигации.
Известны способ и устройство относительного позиционирования бортовых систем [Волковицкий А.К. Структура и алгоритмы бортовых систем относительного позиционирования: дис. канд. тех. наук. Институт проблем управления им. В.А. Трапезникова РАН, Москва, 2012]. Способ, заключающейся в создании переменного вращающегося низкочастотного магнитного поля в заданной зоне перемещения позиционируемого объекта и измерении компонент вектора этого поля подвижным приемником, вычислении пространственных координат и углов ориентации подвижного объекта. Устройство, содержащее три точечных источника переменного вращающегося низкочастотного магнитного поля, работающих на разных частотах, индукционный приемник магнитного поля, размещенный на подвижном объекте.
Недостатком способа и устройства является низкая точность определения координат на борту объекта навигации в условиях нестабильной работы наземного источника переменного вращающегося низкочастотного магнитного поля.
Наиболее близким по технической сущности и достигаемому техническому результату является способ и система навигации с использованием низкочастотного переменного низкочастотного магнитного поля (прототип) [Голев И.М., Сергеев А.В. Локальная система навигации с использованием низкочастотного магнитного поля // Вестник Воронежского государственного технического университета. 2019. Т. 15. № 5. С. 88-94]. Способ, заключающийся в создании в пространстве переменного вращающегося низкочастотного магнитного поля, приеме, измерении амплитуды и фазы пространственных компонент этого поля и вычислении линейных координат объекта навигации. Система, содержащая источник переменного вращающегося низкочастотного магнитного поля, расположенный на поверхности Земли, трехкоординатный датчик магнитного поля, расположенный на подвижном объекте, аналого-цифровой преобразователь и аппаратно-программный комплекс для вычисления координат и выдачи координат потребителю навигационной информации.
Точность таких систем во многом определяется стабильностью во времени параметров источника переменного вращающегося низкочастотного магнитного поля: амплитуды и фазы его магнитной индукции.
Недостатком способа и системы является низкая точность определения координат на борту объекта навигации в условиях нестабильной работы наземного источника переменного вращающегося низкочастотного магнитного поля.
Техническим результатом данного изобретения является повышение точности определения координат объекта навигации, за счет автоматического контроля на борту объекта навигации стабильности работы наземного источника переменного вращающегося низкочастотного магнитного поля.
Технический результат достигается тем, что в известном способе, заключающимся в создании в пространстве переменного вращающегося низкочастотного магнитного поля, его приеме первым датчиком магнитного поля, установленном на объекте навигации, измерении амплитуды и фазы пространственных компонент магнитного поля, вычислении координат точки расположения датчика магнитного поля относительно источника магнитного поля, дополнительно принимают магнитное поле вторым датчиком магнитного поля, установленным на объекте навигации на заданном расстоянии от первого датчика магнитного поля, измеряют амплитуду и фазу пространственных компонент магнитного поля в точке расположения второго датчика магнитного поля, вычисляют координаты точки расположения второго датчика магнитного поля относительно источника магнитного поля, а также вычисляют расстояние между первым и вторым датчиками магнитного поля и сравнивают его с заданным расстоянием, оценивают относительную погрешность определения координат и сравнивают с заданной погрешностью, усредняют значения координат точек расположения первого и второго датчиков магнитного поля и выдают потребителю навигационную информацию.
Технический результат достигается тем, что в известной системе, содержащей наземный источник переменного вращающегося низкочастотного магнитного поля и мобильную часть в составе последовательно соединенных первого датчика магнитного поля, первого блока аналого-цифрового преобразования сигналов и первого блока вычисления координат, дополнительно введены последовательно соединенные второй датчик магнитного поля, второй блок аналого-цифрового преобразования сигналов и второй блок вычисления координат, а также последовательно соединенные блок вычисления расстояния, блок оценки относительной погрешности измерений, блок сравнения, блок выдачи информации потребителю и блок усреднения значений координат, при этом выход первого блока вычисления координат соединен с объединенными входами блока вычисления расстояния и блока усреднения значений координат, кроме того выход второго блока вычисления координат соединен с объединенными вторыми входами блока вычисления расстояния и блока усреднения значений координат, при этом вторые входы блоков оценки относительной погрешности измерений и сравнения, а также выход блок выдачи информации потребителю являются технологическими.
Сущность изобретения заключается в том, что в пространстве создают переменное вращающееся низкочастотное магнитное поле, его принимают двумя датчиками магнитного поля, установленными на объекте навигации на заданном расстоянии между ними, измеряют амплитуды и фазы пространственных компонент магнитного поля, вычисляют координаты точек расположения первого и второго датчиков магнитного поля относительно источника магнитного поля и вычисляют расстояние между первым и вторым датчиками магнитного поля с последующим сравнением его с заданным расстоянием между ними и вычисляют погрешность его определения. Если величина погрешности меньше допустимой, то навигационную информацию выдают потребителю. Если величина погрешности больше допустимой, то подают сигнал, запрещающий выдачу навигационной информации потребителю. Это позволяет повысить точность определения линейных координат на борту объекта навигации в условиях нестабильной работы наземного источника переменного вращающегося низкочастотного магнитного поля.
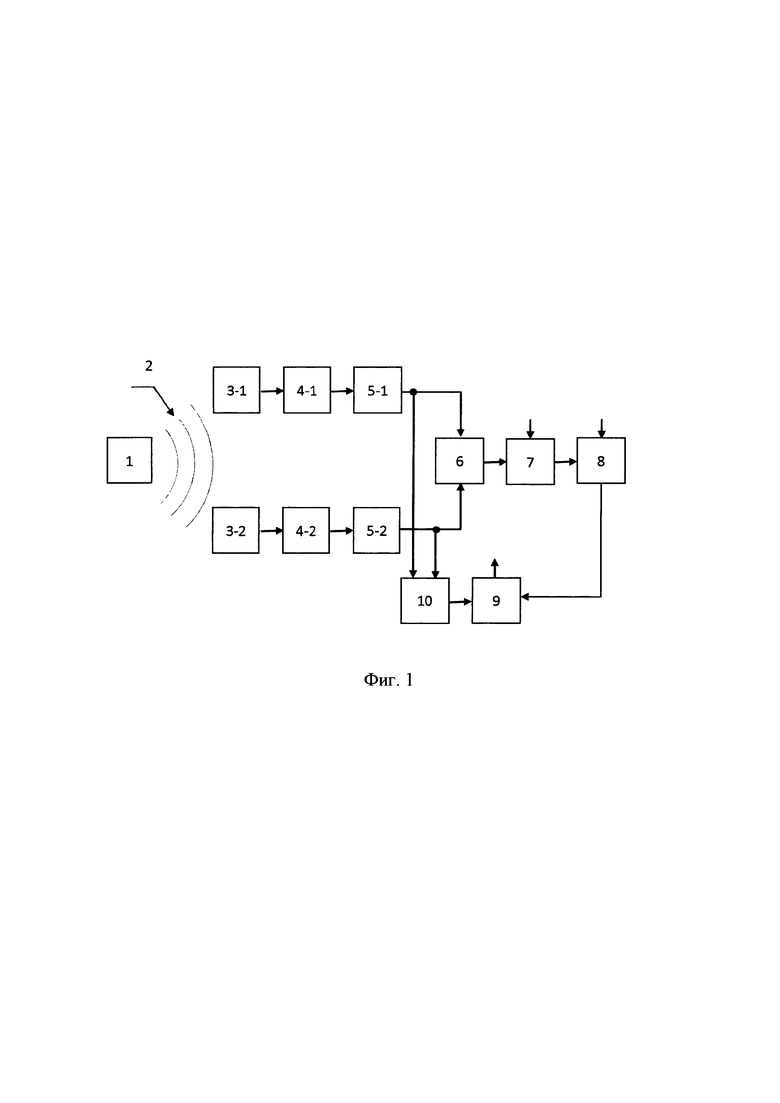
На фиг. 1 приведена структурная схема системы, реализующей способ магнитометрической локальной навигации, где обозначены:
1 - источник переменного низкочастотного вращающегося магнитного поля;
2 - условное обозначение переменного низкочастотного вращающегося магнитного поля;
3-1 и 3-2 - датчики магнитного поля;
4-1 и 4-2 - блоки аналого-цифрового преобразования сигналов;
5-1 и 5-2 - блоки вычисления координат;
6 - блок вычисления расстояния;
7 - блок оценки относительной погрешности измерений;
8 - блок сравнения;
9 - блок выдачи информации потребителю;
10 - блок усреднения значений координат.
Выходы датчиков магнитного поля 3-1 и 3-2 соединены с входами блоков аналого-цифрового преобразования сигналов 4-1 и 4-2 соответственно. Выходы блоков аналого-цифровых преобразователей сигналов 4-1 и 4-2 соединены с входами блоков вычисления координат 5-1 и 5-2, выходы которых подключены к объединенным входам блока вычисления расстояния 6 и ко входам блока усреднения значения координат 10. Последовательно соединены блоки вычисления расстояния 6, оценки относительной погрешности измерений 7, сравнения 8, выдачи информации потребителю 9 и усреднения значений координат 10.
Источник переменного низкочастного вращающегося магнитного поля 1 может быть выполнен в виде двух взаимно перпендикулярных катушек индуктивности (см., например, рис. 2, статья Голев И.М., Сергеев А.В. Локальная система навигации с использованием низкочастотного магнитного поля// Вестник Воронежского государственного технического университета. 2019. Т. 15. № 5. С. 88-94.).
Датчики магнитного поля 3-1 и 3-2 могут быть выполнены на основе феррозондовых преобразователей, например датчиков DRV425EVM (см. https://www.ti.com/tool/DRV425EVM).
Блоки аналого-цифрового преобразования сигналов 4-1 и 4-2, и блоки вычисления координат 5-1 и 5-2 могут быть выполнены на базе одноплатных компьютеров Raspberry Pi 4 Model В (смотри https://amperka.ru/product/raspberry-pi-4-model-b-4-gb) с платой расширения АЦП/ЦАП для Raspberry Pi (AD/DA) (см. https://miniboard.com.ua//p1aty-rasshireniya/184-acpcap-plata-rasshireniya-dlya-raspberry-pi-adda. html).
Блок вычисления расстояния 6 предназначен на для вычисления линейного расстояния Rвыч между первым и вторым датчиками магнитного поля 3-1 и 3-2 на основания результатов вычисления координат (х, z, у) и (х', z', у) поступающих с блоков вычисления координат 5-1 и 5-2, в соответствии с выражением:

Блок оценки относительной погрешности измерений 7 предназначен для вычисления относительной погрешности результатов вычисления линейного расстояния Rвыч, в соответствии с выражением:

где Rзад - заданное, определяемое конструкцией объекта навигации, линейное расстояние между датчиками магнитного поля 3-1 и 3-2, которое вводится через технологический вход.
Блок сравнения 8 предназначен для сравнение вычисленной погрешности δR c допустимой δRдоп. Если погрешность δR не превышает допустимую для данной системы величину δRдоп, то на блок выдачи информации потребителю 9 подают сигнал, разрешающий выдачу навигационной информации потребителю. Если δR>δRдоп, то на блок выдачи информации потребителю 9 подают сигнал, запрещающий выдачу навигационной информации потребителю.
Назначение блок выдачи информации потребителю 9 понятно из названия.
Блок усреднения значений координат 10 предназначен для усреднения значения вычисленных координатах (х, z, у) и (х', z', у'), вычисленных с помощью блоков вычисления координат 5-1 и 5-2.
Блоки вычисления расстояния 6, оценки относительной погрешности измерений 7, сравнения 8, выдачи информации потребителю 9, усреднения значений координат 10 могут быть выполнены на базе микрокомпьютера, например, NVIDIA Jetson Nano (смотри littps://onpad.ru/catalog/cubie/nvidia/3090.html).
Система, реализующая способ магнитометрической локальной навигации, работает следующим образом. На борту объекта навигации размещают два одинаковых датчика магнитного поля 3-1 и 3-2 на заданном расстоянии Rзад друг от друга. При подготовке к применению мобильной части системы магнитометрической локальной навигации через технологический вход в блок оценки относительной погрешности измерений 7 вводят заданное значение расстояния Rзад, а в блок сравнения 8 вводят величину допустимой погрешности определения заданного расстояния между датчиками δRдоп. Создают в пространстве переменное вращающееся низкочастотное магнитное поле. С помощью двух датчиков магнитного поля 3-1 и 3-2 измеряют амплитудные и фазовые компоненты магнитного поля в точках размещения датчиков. Выходные напряжения с датчиков магнитного поля 3-1 и 3-2 подают на входы двух блоков аналогового цифровых преобразователей 4-1 и 4-2 соответственно. Цифровые сигналы подают на входы блоков вычисления координат 5-1 и 5-2. Вычисленные значения координат (х, z, у) и (х', z', у') подают на объединенные вторые входы блоков вычисления расстояния 6 и усреднения значений координат 10. В блоке вычисления расстояния 6 происходит вычисление линейного расстояние Rвыч между датчиками магнитного поля 3-1 и 3-2, в соответствии с выражением (1). В блоке оценки относительной погрешности измерений 7 вычисляют относительную погрешность результатов вычисления линейного расстояния Rвыч, в соответствии с выражением (2). В блоке сравнения 8 сравнивают вычисленную погрешность δR с допустимой δRдоп. Если погрешность δR не превышает допустимую для данной системы величину δRдоп, то на блок выдачи информации потребителю 9 подают разрешающий сигнал. Если δR>δRдоп, то на блок выдачи информации потребителю 9 подают запрещающий сигнал.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕТРИЧЕСКИЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2023 |
|
RU2808125C1 |
| КОМПЛЕКС ДЛЯ ПЕРСОНАЛЬНОЙ НАВИГАЦИИ | 2014 |
|
RU2574309C2 |
| МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ | 2024 |
|
RU2824864C1 |
| УСТРОЙСТВО МАГНИТОМЕТРИЧЕСКОЙ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2789733C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ВРАЩАЮЩЕГОСЯ ДИПОЛЬНОГО МАГНИТНОГО ПОЛЯ | 2022 |
|
RU2789734C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ НИЗКОЧАСТОТНОГО НАВИГАЦИОННОГО МАГНИТНОГО ПОЛЯ | 2024 |
|
RU2829941C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
Изобретение относится к области электротехники, в частности к системам навигации. Технический результат заключается в повышении точности определения координат объекта навигации. Достигается тем, что в пространстве создают переменное вращающееся низкочастотное магнитное поле, которое принимают двумя датчиками магнитного поля, установленными на объекте навигации на заданном расстоянии между ними, измеряют амплитуды и фазы пространственных компонент магнитного поля, вычисляют координаты точек расположения первого и второго датчиков магнитного поля относительно источника магнитного поля и вычисляют расстояние между первым и вторым датчиками магнитного поля с последующим сравнением его с заданным расстоянием между ними и вычисляют погрешность его определения, при этом если величина погрешности меньше допустимой, то навигационную информацию выдают потребителю, а если величина погрешности больше допустимой, то подают сигнал, запрещающий выдачу навигационной информации потребителю. 2 н.п. ф-лы, 1 ил.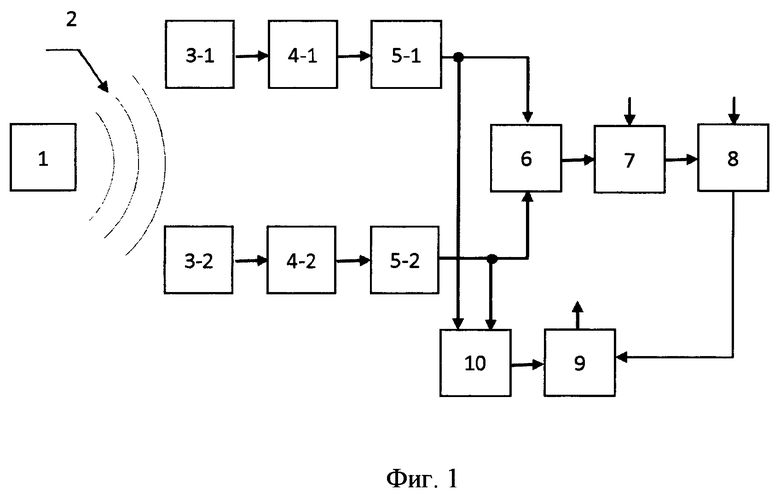
1. Способ магнитометрической локальной навигации, заключающийся в создании в пространстве переменного вращающегося низкочастотного магнитного поля, его приеме первым датчиком магнитного поля, установленном на объекте навигации, измерении амплитуды и фазы пространственных компонент магнитного поля, вычислении координат точки расположения датчика магнитного поля, отличающийся тем, что дополнительно принимают магнитное поле вторым датчиком магнитного поля, установленным на объекте навигации на заданном расстоянии от первого датчика магнитного поля, измеряют амплитуду и фазу пространственных компонент магнитного поля в точке расположения второго датчика магнитного поля, вычисляют координаты точки расположения второго датчика магнитного поля, вычисляют расстояние между датчиками магнитного поля, оценивают относительную погрешность определения расстояния и сравнивают с заданной погрешностью, усредняют значения координат точек расположения первого и второго датчиков магнитного поля и выдают потребителю.
2. Система магнитометрической локальной навигации, содержащая наземный источник переменного вращающегося низкочастотного магнитного поля и мобильную часть в составе последовательно соединенных первого датчика магнитного поля, первого блока аналого-цифрового преобразования сигналов и первого блока вычисления координат, отличающаяся тем, что дополнительно введены последовательно соединенные второй датчик магнитного поля, второй блок аналого-цифрового преобразования сигналов и второй блок вычисления координат, а также последовательно соединенные блок вычисления расстояния, блок оценки относительной погрешности измерений, блок сравнения, блок выдачи информации потребителю и блок усреднения значений координат, при этом выход первого блока вычисления координат соединен с объединенными входами блока вычисления расстояния и блока усреднения значений координат, кроме того, выход второго блока вычисления координат соединен с объединенными вторыми входами блока вычисления расстояния и блока усреднения значений координат, при этом вторые входы блоков оценки относительной погрешности измерений и сравнения, а также выход блок выдачи информации потребителю являются технологическими.
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЗИЦИОНИРОВАНИЕМ ЦЕЛЕВОГО УСТРОЙСТВА В СЕТИ СВЯЗИ | 2018 |
|
RU2736885C1 |
| Способ однопозиционного определения координат источников радиоизлучений коротковолнового диапазона радиоволн при ионосферном распространении | 2019 |
|
RU2713188C1 |
| АДАПТИВНОЕ ОПРЕДЕЛЕНИЕ ПОЗИЦИИ | 2015 |
|
RU2689332C2 |
| US 20180292216 A1, 11.10.2018 | |||
| EP 3350543 B1, 03.07.2019. | |||

