Изобретение относится к области приборостроения и может быть использовано в бесплатформенных инерциальных системах навигации, в частности в бесплатформенных системах ориентации, применяемых, например, в беспилотных, автономных робототехнических комплексах, а также для задач стабилизации различных конструкций.
Уровень техники
Известно устройство для определения углов пространственной ориентации динамических и статических объектов, содержащее корпус, в котором установлен электронный модуль, включающий микроконтроллер, ко входам которого подключены первый датчик угловой скорости по оси X, первый датчик угловой скорости по оси Y, первый датчик угловой скорости по оси Z и первый трехосный акселерометр, включающий также первый блок питания, при этом первый датчик угловой скорости по оси X, первый датчик угловой скорости по оси Y, первый датчик угловой скорости по оси Z и первый трехосный акселерометр подключены к первому блоку питания, в котором в электронный модуль введены второй датчик угловой скорости по оси X, второй датчик угловой скорости по оси Y, второй датчик угловой скорости по оси Z, второй трехосный акселерометр и второй блок питания, при этом второй датчик угловой скорости по оси X, второй датчик угловой скорости по оси Y, второй датчик угловой скорости по оси Z и второй акселерометр подключены ко входам микроконтроллера и к первому блоку питания, а второй блок питания подключен к микроконтроллеру [RU 2733099].
Недостаток этого устройства заключается в больших габаритных размерах и массе, высоком потреблении электроэнергии по причине использования корпуса, а также отдельных дискретных датчиков угловой скорости и акселерометров и их количестве.
Известно также устройство MTI-3 производства компании Xsens (Нидерланды), в котором выводы устройства выполнены в виде торцевой металлизации, что повышает сложность производства текстолитовой печатной платы. Также в MTI-3, кварцевый резонатор используется как дискретный компонент, что снижает энергоэффективность. Для осуществления качественной калибровки магнитометров, компания Xsens требует медленного вращения прибора без сильных ускорений. Это означает, что показания акселерометров используются в сыром виде для приведения измерений магнитометров к необходимой системе координат.
Недостатки этого устройства заключаются в повышенном потреблении электроэнергии, более сложной технологии производства печатной платы, повышенными требованиями к калибровке магнитометра, отсутствием встроенной коррекции от спутниковой навигационной системы в составе устройства, что в свою очередь понижает точность определения углов крена, тангажа и истинного курса (углов ориентации). Форма выводов MTI-3 менее пригодна для осуществления механической юстировки на объекте-носителе без применения юстировочной матрицы для сопоставления измерительных осей прибора и осей объекта-носителя. Недостатком также является отсутствие возможности интегрировать в устройство дополнительные корректоры, возможно только внешнее подключение таковых. Это ведет увеличению габаритных размеров конечного решения, в котором применяется MTI-3.
Это устройство выбрано в качестве прототипа предложенного решения. Раскрытие сущности изобретения
Технический результат изобретения заключается в снижении потреблении электроэнергии, упрощении технологии производства печатной платы, в снижении требований к калибровке блока магнитометров, в возможности использования встроенного модуля спутниковой навигационной системы для повышения точности определения углов ориентации, а также снижении габаритов конечного решения за счет применения технологии 3D-сборки.
Сущность изобретения заключается в том, что в устройстве для определения углов крена, тангажа и истинного курса, содержащее базовый модуль с набором металлизируемых контактных площадок, на котором расположен микроконтроллер, включающий кварцевый резонатор, расположен также блок акселераторов и датчиков угловой скорости, и расположен также магнитометр, при этом каждая контактная площадка выполнена в виде полуотверстия, ось которого расположена преимущественно перпендикулярно поверхности базового модуля, а кварцевый резонатор установлен внутри микроконтроллера.
Существует вариант, в котором в устройство введен модуль спутниковой навигационной системы, расположенный на базовом модуле.
Существует также вариант, в котором базовый модуль выполнен в виде одной печатной платы.
Существует также вариант, в котором базовый модуль выполнен в виде первой печатной платы и второй печатной платы, соединенных первыми штыревыми соединениями.
Существует также вариант, в котором базовый модуль выполнен в виде, первой печатной платы и второй печатной платы, между которыми расположена, по меньшей мере, одна третья печатная плата, при этом все печатные платы соединены вторыми штыревыми соединениями.
Существует также вариант, в котором базовый модуль выполнен в виде, первой печатной платы и второй печатной платы, между которыми расположены, по меньшей мере, две четвертых печатных плат, соединенных третьими штыревыми соединениями, при этом первая печатная плат и вторая печатная плат соединены вторыми штыревыми соединениями.
Существует также вариант, в котором, по меньшей мере, в одной четвертой печатной плате выполнено отверстие, в котором установлен модуль спутниковой навигационной системы.
Краткое описание чертежей
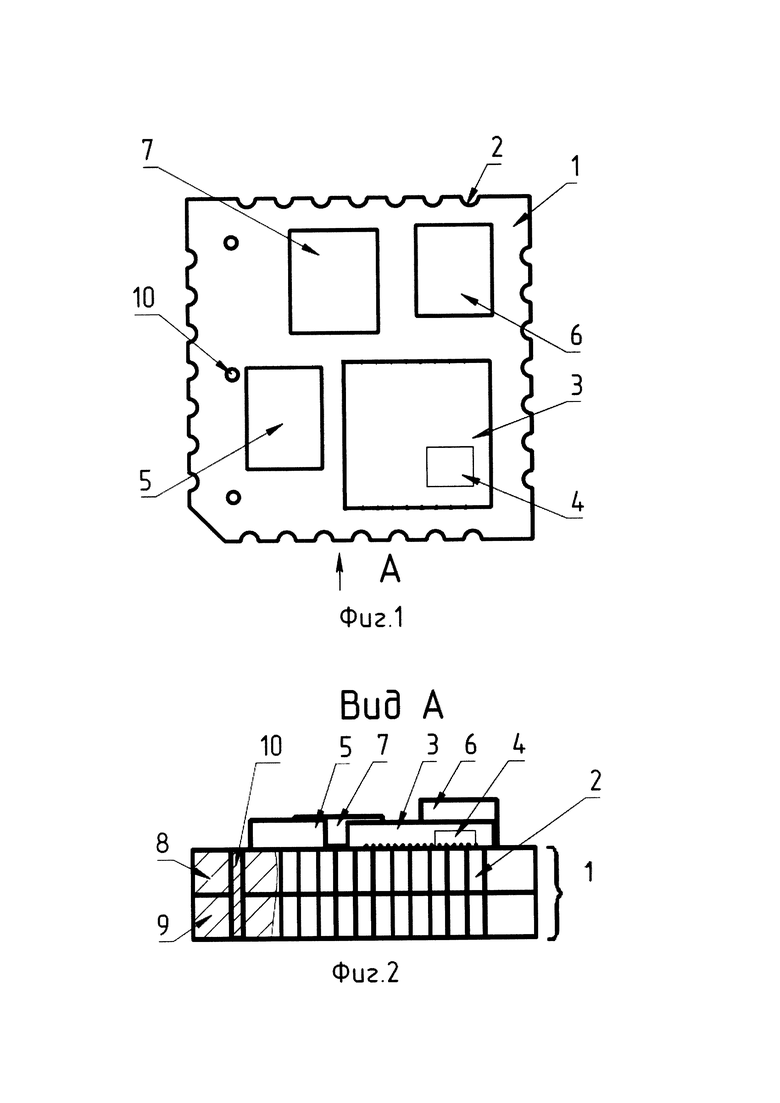
На фиг. 1 схематически изображено устройство для определения углов крена, тангажа и истинного курса.
На фиг. 2 изображен вид А на устройство для определения углов крена, тангажа и истинного курса с двумя печатными платами.
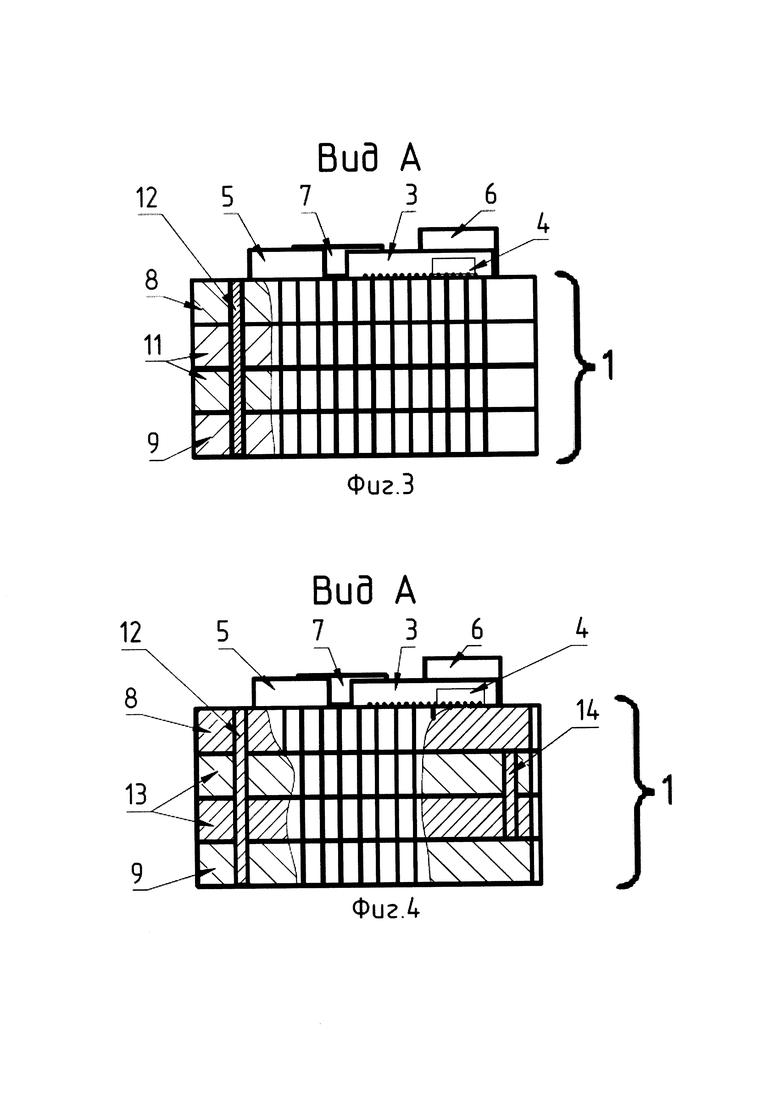
На фиг. 3 изображен вид А на устройство для определения углов крена, тангажа и истинного курса с четырьмя печатными платами.
На фиг. 4 изображен вид А на устройство для определения углов крена, тангажа и истинного курса с четырьмя печатными платами и соединением внутренних печатных плат.
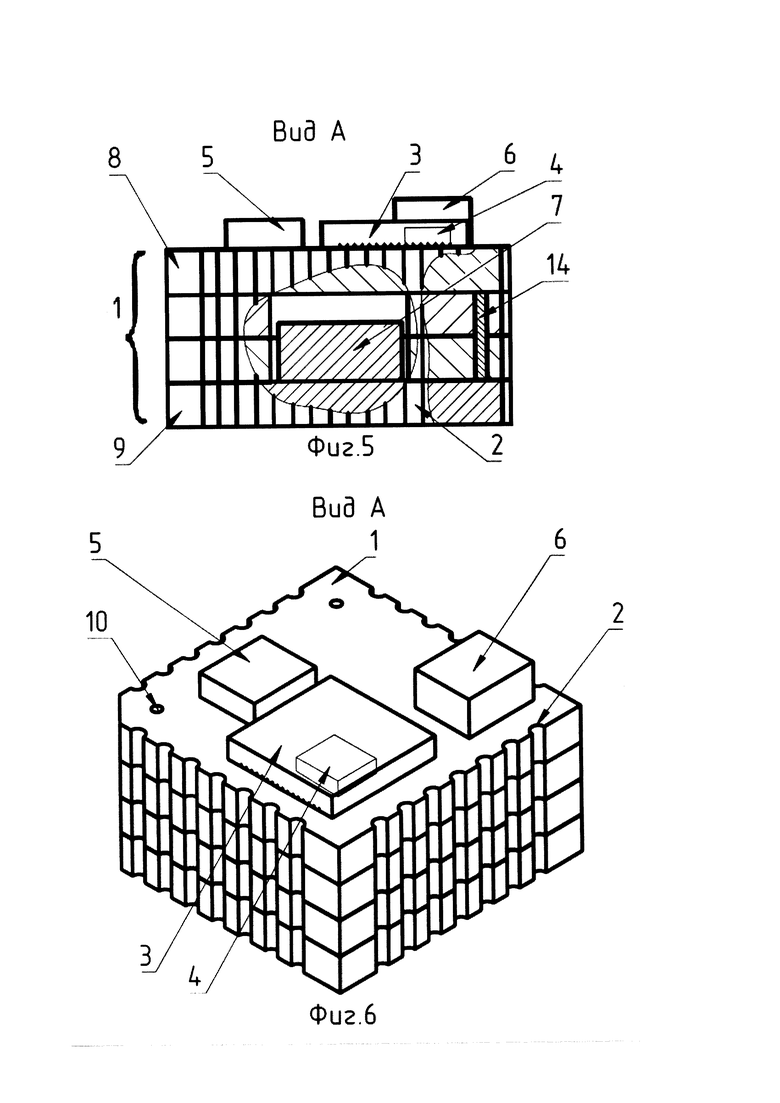
На фиг. 5 изображен вид А на устройство для определения углов крена, тангажа и истинного курса с внутренним расположением модуля спутниковой навигационной системы.
На фиг. 6 изображена аксонометрическая проекция устройства для определения углов крена, тангажа и истинного курса по фиг. 5.
Осуществление изобретение
Устройство для определения углов крена, тангажа и истинного курса, содержит базовый модуль 1 (Фиг. 1) с набором металлизируемых контактных площадок 2, на котором расположен микроконтроллер 3. Микроконтроллер 3 включает кварцевый резонатор 4, в качестве которого можно использовать GD32F403VCH6 (пр-ва GigaDevice, КНР). На базовом модуле 1 расположен также блок акселераторов и датчиков угловой скорости 5, в качестве которого можно использовать QMI8658C (пр-ва QST, КНР). На базовом модуле 1 расположен также магнитометр 6, в качестве которого можно использовать ММС5983МА (пр-ва Memsic, КНР). Причем каждая контактная площадка 2 выполнена в виде металлизированного полуотверстия, ось которого расположена преимущественно перпендикулярно поверхности базового модуля 1. Под полуотверстием понимается часть цилиндрической образующей отверстия, преимущественно имеющая угловой размер, равный 180°. Каждая контактная площадка 2 соединена с микроконтролером 3 и другими электронными компонентами (условно не показано). Металлизированные полуотверстия являются выводами устройства, через них осуществляется информационный обмен с объектом-носителем, а также организовано питание базового модуля 1. При этом кварцевый резонатор 4 установлен внутри микроконтроллера 3. Для более точного определения углов пространственной ориентации в устройстве может применяться коррекция от модуля спутниковой навигационной системы 7. Это позволит повысить надежность и точность определения углов крена, тангажа и курса даже в условиях магнитных помех, мешающих корректной работе магнитометрического датчика 6. Коммутация между слоями сборки может осуществляться с помощью проводящего клея или штыревых соединений, установленных через переходные отверстия (не показаны) и зафиксированных с помощью припоя. Штыревые соединения могут соединять как внешние печатные платы, так и только внутренние.
Существует вариант, в котором в устройство введен модуль спутниковой навигационной системы 7, расположенный на базовом модуле 1. При этом модуль спутниковой навигационной системы 7 может быть выполнен в виде дискретного электронного компонента или модуля. Например, модуль ПРО-04 пр-ва АО «НИИМА «Прогресс» (Россия).
Существует также вариант, в котором базовый модуль 1 выполнен в виде одной печатной платы.
Существует также вариант, в котором базовый модуль 1 выполнен в виде первой печатной платы 8 (Фиг. 2) и второй печатной платы 9, соединенных первыми штыревыми соединениями 10, которые могут быть выполнены в виде, например, швейных игл или медной проволоки. Штыревые соединения 10 соединяют платы между собой и являются коммутационными соединениями, обеспечивающими питание и информационный обмен.
Существует также вариант, в котором базовый модуль 1 выполнен в виде, первой печатной платы 8 (Фиг. 3) и второй печатной платы 9, между которыми расположена, по меньшей мере, одна третья печатная плата 11, при этом все печатные платы соединены вторыми штыревыми соединениями 12.
Существует также вариант, в котором базовый модуль 1 выполнен в виде, первой печатной платы 8 (Фиг. 4) и второй печатной платы 9, между которыми расположены, по меньшей мере, две четвертых печатных плат 13, соединенных третьими штыревыми соединениями 14, при этом первая печатная плат 8 и вторая печатная плат 9 соединены вторыми штыревыми соединениями 12. Последовательность сборки устройства может быть следующая. Через сквозные металлизированные переходные отверстия (не показаны) в печатных платах расположены штыревые соединения, которые фиксируются с помощью припоя. Допустимо использовать клей для более надежной и точной фиксации плат относительно друг друга. Коммутация между разными печатными платами базового модуля осуществляется через штыревые соединения. Также возможен вариант, когда коммутация осуществляется путем клеевого соединения контактных площадок печатных плат с помощью токопроводящего клея.
Существует также вариант, в котором, по меньшей мере, в одной четвертой печатной плате 13 ( фиг. 5) выполнено отверстие 15, в котором установлен модуль спутниковой навигационной системы 7. Последовательность сборки устройства может быть следующая. Печатные платы устанавливают одна над другой, начиная с нижней. Коммутация осуществляется с помощью штыревых соединений или токопроводящего клея. В печатной плате, расположенной над платой с модулем 7 реализовано отверстие для расположения в нем корпуса модуля 7, позволяющее совместить все печатные платы между собой и обеспечить предельно компактное решение.
Устройство работает следующим образом. Устройство устанавливают на объект-носитель (не показан), ориентацию которого необходимого определять, и подключают к бортовому питанию объекта-носителя. Внешний блок питания осуществляет питание устройства. Датчики угловой скорости (в составе модуля 5) измеряют угловую скорость подвижного объекта-носителя по трем взаимоортогональным осям, информация с датчиков поступает в микроконтроллер 3. Акселерометры (в составе модуля 5) измеряют линейное ускорение подвижного объекта-носителя по трем взаимоортогональным осям. Информация с акселерометров поступает в микроконтроллер 3. В микроконтроллере 3 с помощью математически реализованного фильтра Калмана осуществляется интегрирование показаний с датчиков угловой скорости и линейного ускорения с целью получения значений углов пространственной ориентации динамического объекта-носителя. Для определения углов пространственной ориентации статического объекта-носителя (когда угловые скорости и линейные ускорения объекта-носителя настолько малы, что их значениями можно пренебречь), используются показания только акселерометров, на основе показаний которых измеряются углы отклонения объекта-носителя от вектора силы тяжести Земли. Информацию с цифрового выхода устройства для определения углов крена, тангажа и истинного курса поступает на входы внешних устройств (не показаны), которые обеспечивают навигацию, управление двигателями подвижных частей беспилотных и/или автономных роботехнических комплексов.
На устройстве установлен магнитометр 6, который измеряет вектор магнитного поля Земли в связанной с объектом-носителем системе координат. С помощью информации от магнитометра 6 в микроконтроллере 3 осуществляется коррекция курса.
Существует также вариант, в котором корректирующая информация поступает от приемника модуля спутниковой навигационной системы 7. Применение поправок от модуля спутниковой навигационной системы 7 позволяет повысить точность определения углов крена, тангажа и курса. Для корректной работы модуля спутниковой навигационной системы 7 необходимо применение внешней антенны (не показана).
Существует также вариант, в котором корректирующая информация может поступать от внешних источников коррекции (барометр, одометр, гидродинамический ЛАГ, сонар, система воздушных сигналов). Для этого предусмотрены контакты по периметру устройства. Применение внешних корректирующих устройств способствует повышению надежности и точности определения углов крена, тангажа.
Технические результаты
То, что в устройстве для определения углов крена, тангажа и истинного курса, содержащем базовый модуль 1 с набором металлизируемых контактных площадок 2, на котором расположен микроконтроллер 3, включающий кварцевый резонатор 4, расположен также блок акселераторов и датчиков угловой скорости 5, и расположен также магнитометр 6, при этом каждая контактная площадка 2 выполнена в виде полуотверстия, ось которого расположена преимущественно перпендикулярно поверхности базового модуля 1, а кварцевый резонатор 4 установлен внутри микроконтроллера 3 приводит к созданию энергоэффективного устройства определения углов крена, тангажа и истинного курса, потребление которого значительно ниже ближайшего аналога за счет применения встроенного в микроконтроллер кварцевого резонатора, а не использование внешнего дискретного компонента, что также снижает массу устройства. Конструкция металлизированных полуотверстий позволяет упростить процесс производства печатной платы, т.к. операция по формированию торцевой металлизации не доступна на многих производствах печатных плат. За счет применения выводов в форме полуотверстий можно более точно установить базовый модуль 1 на объекте-носителе. Это повышает точность определения углов ориентации в условиях, когда нет технической возможности или компетенций определить котировочную матрицу для сопоставления измерительных осей прибора и осей объекта-носителя. Алгоритм калибровки основан на алгоритмах обработки информации от магнитометров и датчиков угловой скорости, не используя информацию от акселерометров. Это позволяет не ограничивать пользователя в интенсивности движения, что упрощает процесс калибровки магнитометров. Алгоритмы, основанные на показаниях акселерометров, требуют отсутствия ускорения, отличного от силы тяжести. Данное решение понижает требования к процессу калибровки магнитометров, упрощает данный процесс по сравнению с ближайшим аналогом.
То, что в устройство введен модуль спутниковой навигационной системы 7, расположенный на базовом модуле 1 приводит к увеличению точности определения углов крена, тангажа и истинного курса за счет комплексирования сигнала навигационного модуля и инерциальной системы.
Использование модуля спутниковой навигационной системы 7 в комбинации с инерциальными датчиками (датчики угловой скорости и акселерометры) позволяет корректировать решение определения углов крена, тангажа и истинного курса. Это снижает погрешность определения углов ориентации, обусловленное дрейфом датчиков угловой скорости 5. Подключение модуля спутниковой навигационной системы 7 осуществляется с применением технологи 3D-с6орки, что снижает габаритные характеристики конченого решения и упрощает работу с ним, повышает надежность за счет простоты монтажа на объект-носитель, отсутствия разъемов, проводов, шлейфов и т.д.
То, что базовый модуль 1 выполнен в виде одной печатной платы приводит к уменьшению массо-габаритных характеристик. Конструкция металлизированных полуотверстий позволяет упростить процесс производства печатной платы. За счет применения выводов в форме полуотверстий можно более точно установить базовый модуль 1 на объекте-носителе. Это повышает точность определения углов ориентации в условиях, когда нет технической возможности или компетенций определить юстировочную матрицу для сопоставления измерительных осей прибора и осей объекта-носителя.
То, что базовый модуль 1 выполнен в виде первой печатной платы 8 и второй печатной платы 9, соединенных первыми штыревыми соединениями 10 приводит к возможности реализации части электронной схемы на печатной плате 9, что позволяет реализовать возможность дополнительной коррекции системы на основе инерциальных датчиков за счет размещения как самих корректоров на базовом модуле, так и возможность подключения внешних корректоров, таких как одометр, сонар, гидродинамический лаг, барометр и др. путем установки разъемов для подключения, реализация сигнальных линий на печатных платах. Данное решение позволяет увеличить точность определения углов крена, тангажа и истинного курса без увеличения длины и ширины базового модуля 1.
То, что базовый модуль 1 выполнен в виде, первой печатной платы 8 и второй печатной платы 9, между которыми расположена, по меньшей мере, одна третья печатная плата 11, при этом все печатные платы соединены вторыми штыревыми соединениями 12 приводит к возможности реализации части электронной схемы на печатных платах 9 и 11, что позволяет реализовать возможность дополнительной коррекции системы на основе инерциальных датчиков за счет размещения как самих корректоров на базовом модуле, так и возможность подключения внешних корректоров (установка разъемов для подключения, реализация сигнальных линий на печатных платах), что в свою очередь позволяет увеличить точность определения углов крена, тангажа и истинного курса без увеличения длины и ширины базового модуля. При этом коммутация между печатными платами может осуществляться как с помощью штырьевых соединений, так и с помощью токопроводящего клея и/или механического соединения контактных площадок плат.
То, что базовый модуль 1 выполнен в виде, первой печатной платы 8 и второй печатной платы 9, между которыми расположены, по меньшей мере, две четвертых печатных плат 13, соединенных третьими штыревыми соединениями 14, при этом первая печатная плат 8 и вторая печатная плат 9 соединены вторыми штыревыми соединениями 12 приводит к возможности реализации части электронной схемы на печатных платах 9 и 13, что позволяет реализовать возможность дополнительной коррекции системы на основе инерциальных датчиков за счет размещения как самих корректирующих устройств на базовом модуле, так и возможность подключения внешних корректирующих устройств путем установки разъемов для подключения, реализации сигнальных линий на печатных платах, что в свою очередь позволяет увеличить точность определения углов крена, тангажа и истинного курса без увеличения длины и ширины базового модуля. При этом коммутация между печатными платами может осуществляться только помощью штыревых соединений, соединяющих как все печатные платы между собой, так и некоторые из них.
То, что, по меньшей мере, в одной четвертой печатной плате 13 выполнено отверстие 15, в котором установлен модуль спутниковой навигационной системы 7 приводит к увеличению точности определения углов крена, тангажа и истинного курса. Применение технологии 3D сборки с коммутацией между слоями с помощью штыревых соединений позволяет использовать дополнительные корректоры инерциальной системы, например, модуль спутниковой навигационной системы 7, что позволяет увеличить точность определения углов крена, тангажа и истинного курса без увеличения длины и ширины базового модуля. На платах 9, 13 могут располагаться и другие электронные компоненты с целью повышения точности определения углов пространственной ориентации и экономии при сохранении габаритных характеристик базового модуля. Возможность использования встроенного модуля спутниковой навигационной системы также снижает габариты конечного решения за счет применения технологии 3D-сборки, в то время как у ближайшего аналога есть возможность использования только внешнего модуля спутниковой навигационной системы. Использование технологии 3D-сборки позволяет предельно близко расположить модуль спутниковой навигационной системы 7 и сохранить механическую целостность конченого решения. Данное решение также повышает стойкость к механическим ударам и вибрациям.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения углов пространственной ориентации динамических и статических объектов | 2022 |
|
RU2795261C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| Способ оценки пространственного и углового положения объекта | 2024 |
|
RU2831368C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2697859C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2744772C1 |
| Устройство для определения углов пространственной ориентации динамических и статических объектов | 2020 |
|
RU2733099C1 |
Изобретение относится к области приборостроения и применяется в бесплатформенных инерциальных системах навигации (БИНС). Сущность заявленного изобретения заключается в том, что в устройстве для определения углов крена, тангажа и истинного курса, содержащем базовый модуль с набором металлизируемых контактных площадок, на котором расположен микроконтроллер, включающий кварцевый резонатор, расположен также блок акселераторов и датчиков угловой скорости, магнитометр. При этом каждая контактная площадка выполнена в виде полуотверстия, ось которого расположена перпендикулярно поверхности базового модуля, а кварцевый резонатор установлен внутри микроконтроллера. Технический результат, достигаемый при осуществлении предлагаемого устройства, заключается в снижении энергопотребления, упрощении технологии производства печатной платы. 5 з.п. ф-лы, 6 ил.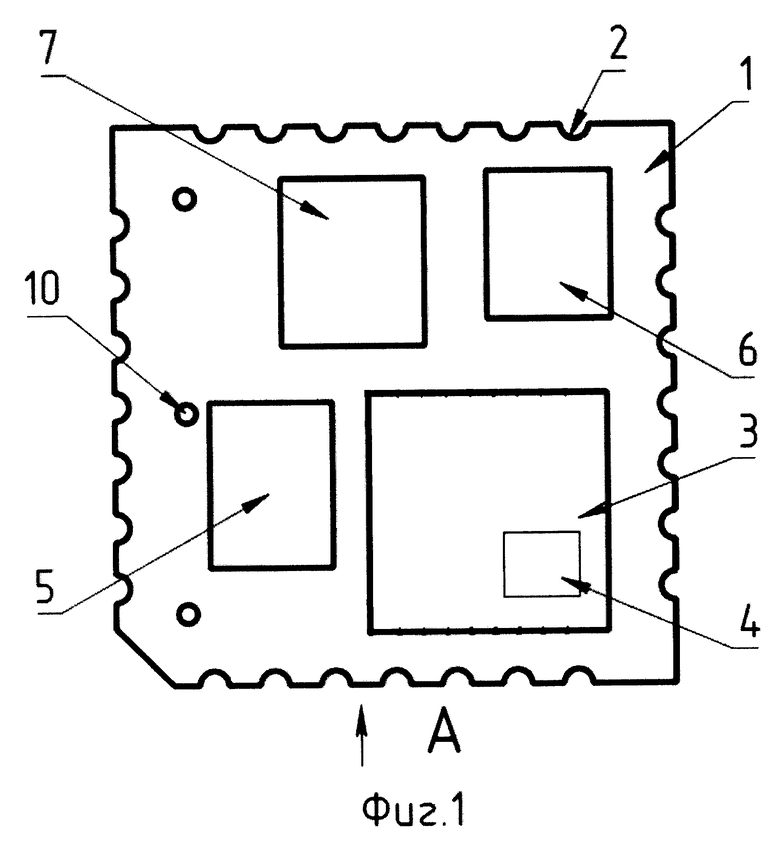
1. Устройство для определения углов крена, тангажа и истинного курса, содержащее базовый модуль с набором металлизируемых контактных площадок, на котором расположен микроконтроллер, кварцевый резонатор, блок акселераторов и датчиков угловой скорости, магнитометр, отличающееся тем, что каждая контактная площадка выполнена в виде полуотверстия, ось которого расположена перпендикулярно поверхности базового модуля, при этом кварцевый резонатор установлен внутри микроконтроллера, при этом на базовом модуле расположен модуль навигационной спутниковой системы, подключенный посредством технологии 3D-сборки.
2. Устройство по п. 1, отличающееся тем, что базовый модуль выполнен в виде одной печатной платы.
3. Устройство по п. 1, отличающееся тем, что базовый модуль выполнен в виде первой печатной платы и второй печатной платы, соединенных первыми штыревыми соединениями.
4. Устройство по п. 1, отличающееся тем, что базовый модуль выполнен в виде первой печатной платы и второй печатной платы, между которыми расположена, по меньшей мере, одна третья печатная плата, при этом все печатные платы соединены вторыми штыревыми соединениями.
5. Устройство по п. 1, отличающееся тем, что базовый модуль выполнен в виде первой печатной платы и второй печатной платы, между которыми расположены, по меньшей мере, две четвертых печатных плат, соединенных третьими штыревыми соединениями, при этом первая печатная плата и вторая печатная плата соединены вторыми штыревыми соединениями.
6. Устройство по п. 5, отличающееся тем, что, по меньшей мере, в одной четвертой печатной плате выполнено отверстие, в котором установлен модуль спутниковой навигационной системы.
| Устройство для определения углов пространственной ориентации динамических и статических объектов | 2020 |
|
RU2733099C1 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КУРСА | 2023 |
|
RU2809659C1 |
| US 6522992 B1, 18.02.2003 | |||
| US 11409006 B2, 09.08.2022. | |||

