Область техники
Изобретение относится к области приборостроения и может быть использовано в бесплатформенных инерциальных системах навигации, в частности в бесплатформенных системах ориентации, применяемых, например, в беспилотных, автономных робототехнических комплексах.
Предшествующий уровень техники
Известно устройство для определения углов пространственной ориентации динамических и статических объектов, содержащее корпус, в котором установлен электронный модуль, включающий микроконтроллер, ко входам которого подключены инерциальные датчики, а именно: первый датчик угловой скорости по оси X, первый датчик угловой скорости по оси Y, первый датчик угловой скорости по оси Z и первый трехкомпонентный блок датчиков линейных ускорений (акселерометров), включающий также первый блок питания, при этом первый датчик угловой скорости по оси X, первый датчик угловой скорости по оси Y, первый датчик угловой скорости по оси Z и первый трехосный акселерометр подключены к первому блоку питания [RU 2647205].
Недостатками этого устройства являются ограниченные возможности измерения параметров подвижных объектов-носителей. Это связано с тем, что при резких изменениях угловой скорости и линейного ускорения подвижного объекта-носителя, на котором установлено заявленное устройство, могут возникать значительные погрешности измерения параметров движения. Также коррекция показаний датчиков угловой скорости и акселерометров обеспечивается менее точно в ряде практических применений. Эти факторы не обеспечивают достаточной точности определения пространственной ориентации. Например, для применения в составе подводных беспилотных аппаратов и навигации внутри помещений.
Известно также устройство для определения угловых скоростей и линейных ускорений, содержащее корпус, в котором установлен электронный модуль, включающий микроконтроллер, ко входам которого подключен блок, включающий первый датчик угловой скорости по оси X, первый датчик угловой скорости по оси Y, первый датчик угловой скорости по оси Z и первый трехосный акселерометр (датчик линейного ускорения), включающий также первый блок питания, при этом первый датчик угловой скорости по оси X, первый датчик угловой скорости по оси Y, первый датчик угловой скорости по оси Z, первый трехосный акселерометр и микроконтроллер подключены к первому блоку питания [https://www.analog.com/en/products/adis16495.html?doc=ADIS16495.pdf].
Недостатками этого устройства являются ограниченные возможности измерения параметров подвижных объектов-носителей (отсутствие дублирования датчиков угловой скорости и линейного ускорения, отсутствие коррекции по показаниям магнитных полей, отсутствие коррекции по значениям расстояний до объектов, взятых за ориентир), что приводит к снижению точности измерения пространственной ориентации. Например, при резких изменениях угловой скорости и линейного ускорения могут возникать значительные погрешности измерения параметров движения. Также коррекция показаний датчиков угловой скорости и акселерометров обеспечивается менее точно в ряде практических применений. Например, для применения в составе подводных беспилотных аппаратов и навигации внутри помещений.
Отсутствие дублирования датчиков угловой скорости и линейного ускорения снижает надежность известного устройства.
Это устройство выбрано в качестве прототипа предложенного решения.
Раскрытие сущности изобретения
Задача изобретения заключается в определении пространственной ориентации объекта-носителя (углов крена, тангажа, рыскания (курса)) на основе показаний угловой скорости, линейных ускорений, а также показаний магнитометра и сонара.
Технический результат изобретения заключается в расширении возможности измерения параметров подвижных объектов-носителей (динамических объектов) и статических объектов-носителей (статических объектов), что приводит к повышению точности измерения пространственной ориентации и повышению надежности функционирования устройства.
Указанный технический результат заключается в том, что в устройстве для определения углов пространственной ориентации динамических и статических объектов-носителей, содержащем корпус, в котором установлен электронный модуль, включающий микроконтроллер, ко входам которого подключены первый датчик угловой скорости по оси X, первый датчик угловой скорости по оси Y, первый датчик угловой скорости по оси Z и первый трехосный акселерометр, включающий также первый блок питания, при этом первый датчик угловой скорости по оси X, первый датчик угловой скорости по оси Y, первый датчик угловой скорости по оси Z и первый трехосный акселерометр подключены к первому блоку питания, в электронный модуль введены второй датчик угловой скорости по оси X, второй датчик угловой скорости по оси Y, второй датчик угловой скорости по оси Z, второй трехосный акселерометр и второй блок питания, при этом второй датчик угловой скорости по оси X, второй датчик угловой скорости по оси Y, второй датчик угловой скорости по оси Z и второй акселерометр подключены ко входам микроконтроллера и к первому блоку питания, а второй блок питания подключен к микроконтроллеру.
Существует вариант, в котором в электронный модуль включен аккумулятор, подключенный к первому блоку питания и второму блоку питания.
Существует также вариант, в котором в устройство введен, по меньшей мере, один сонар, подключенный к микроконтроллеру и расположенный внутри корпуса, выполненного звукопроницаемым.
Существует также вариант, в котором в электронный модуль введен радиоинтерфейс, подключенный к микроконтроллеру.
Существует также вариант, в котором в электронный модуль введен трехосный магнитометр, сопряженный с микроконтроллером и подключенный к первому блоку питания, при этом корпус выполнен магнитопроницаемым.
Существует также вариант, в котором в устройство введен, по меньшей мере, один сонар, подключенный к микроконтроллеру и расположенный внутри корпуса, при этом в корпусе выполнено, по меньшей мере, одно отверстие, геометрическое сопряженное с, по меньшей мере, одним сонаром.
Существует также вариант, в котором в устройство введен, по меньшей мере, один сонар, подключенный к микроконтроллеру, при этом, по меньшей мере, один сонар расположен за пределами корпуса.
Реализация изобретения
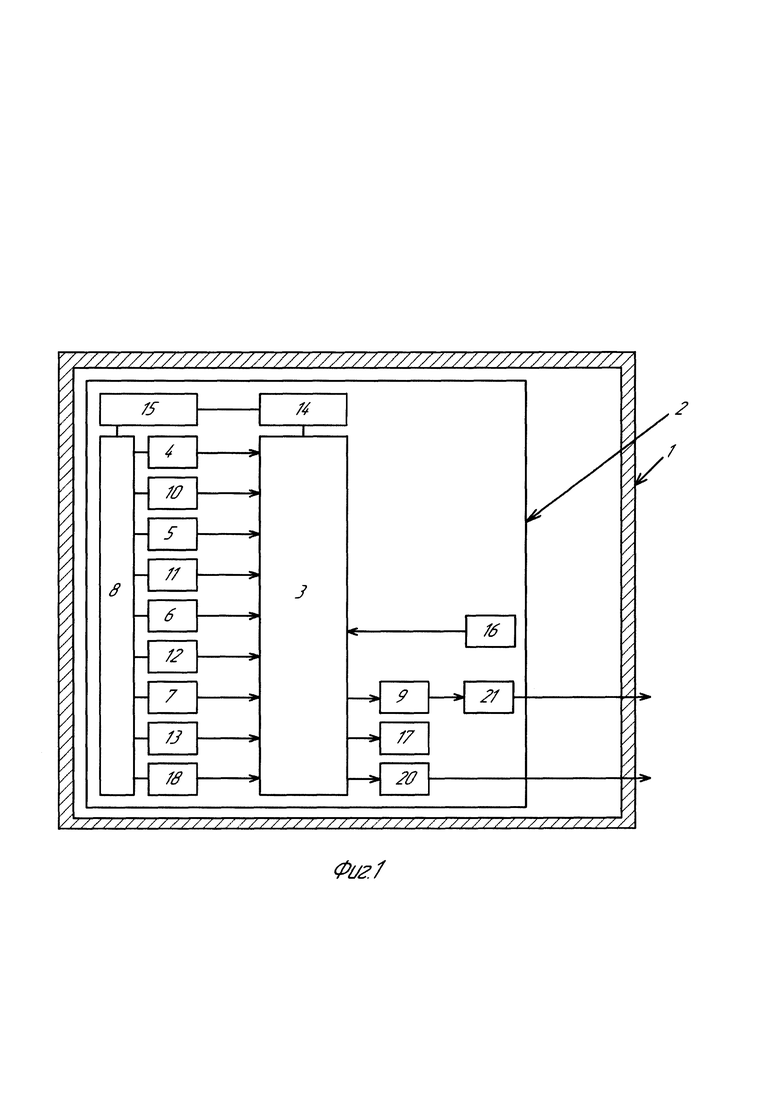
На фиг. 1 изображена схема устройства для определения углов пространственной ориентации динамических и статических объектов-носителей с внутренним расположением сонара.
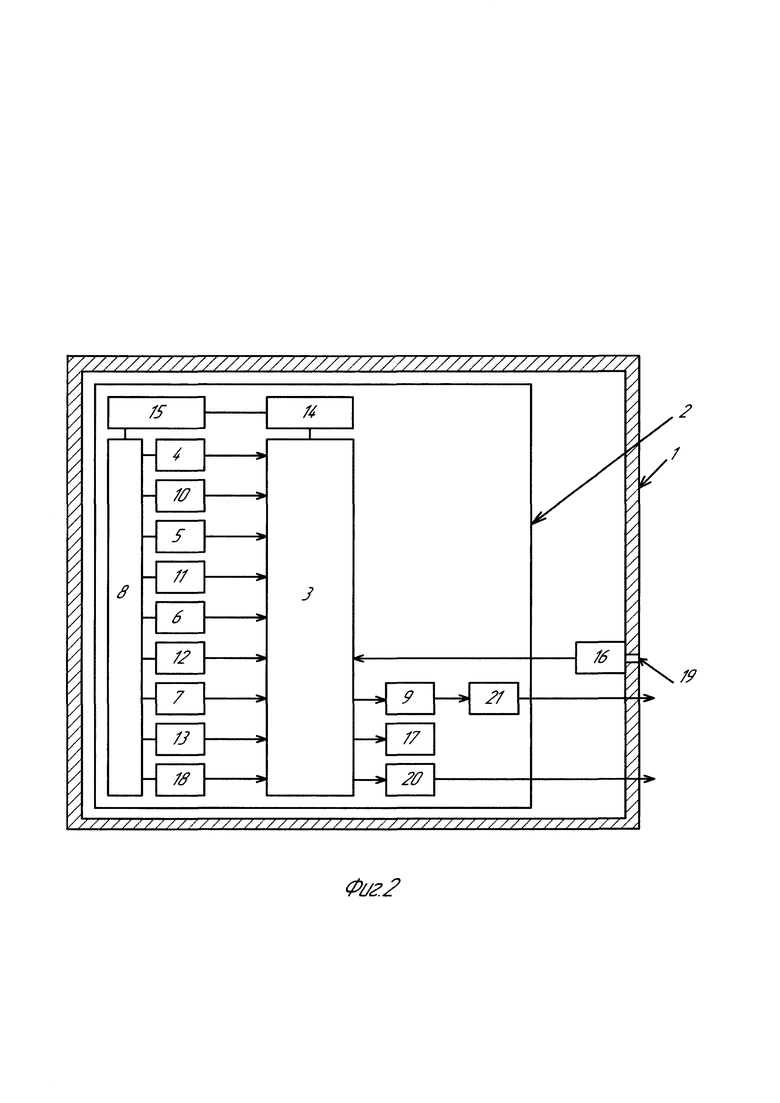
На фиг. 2 изображена схема устройства для определения углов пространственной ориентации динамических и статических объектов-носителей с внутренним расположением сонара напротив отверстия корпуса.
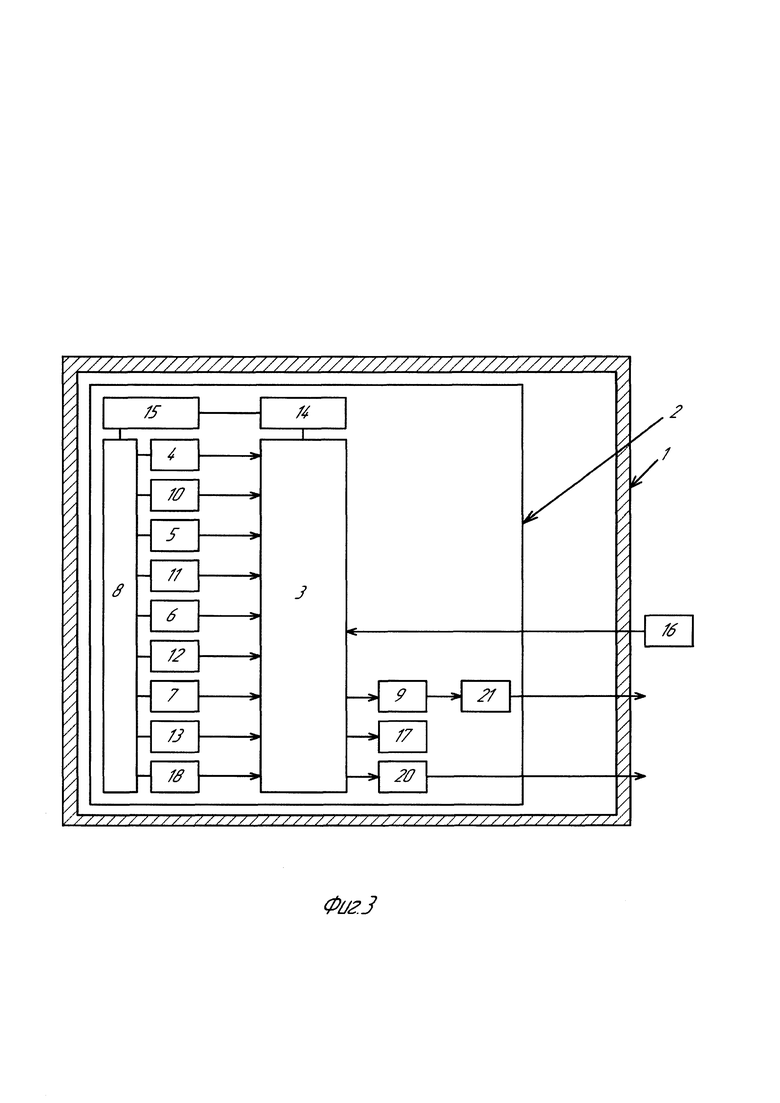
На фиг. 3 изображена схема устройства для определения углов пространственной ориентации динамических и статических объектов-носителей с внешним расположением сонара.
Устройство для определения углов пространственной ориентации динамических и статических объектов-носителей содержит корпус 1 (фиг. 1), в котором установлен электронный модуль 2. В базовом варианте корпус 1 может быть изготовлен из алюминиевого сплава В95Т1. Электронный модуль 2 может представлять собой восьмислойную печатную плату с двухсторонним монтажом микросхем. На нем размещен микроконтроллер 3, в качестве которого можно использовать высокопроизводительный микроконтроллер STM32F765 фирмы STMicroelectronics. Высокая производительность (тактовая частота до 216 МГц), наличие сопроцессора математических вычислений с двойной точностью, встроенной памяти (ОЗУ 320 кБайт, «флэш»-память - до 1 Мбайт), продвинутой архитектуры, каналов прямого доступа к памяти, расширенных режимов энергосбережения делают этот микроконтроллер оптимальным для использования его в малогабаритном устройстве. В одном из вариантов в качестве микроконтроллера 3 может быть использован микроконтроллер К1901BЦ1QI компании Миландр.
Ко входам микроконтроллера 3 подключены первый датчик угловой скорости по оси X 4, первый датчик угловой скорости по оси Y 5, первый датчик угловой скорости по оси Z 6. В качестве датчиков угловой скорости можно использовать датчики серии CRM100 компании Silicon Sensing. Используемый в этих датчиках в качестве чувствительного элемента кольцевой резонатор обеспечивает высокую стойкость ДУС CRM 100 к механическим ударам, вибрации, изменению температуры среды. Стабильность смещения нуля в запуске на уровне 12°/ч, малые шумы (случайное угловое блуждание 0.2°/√ч), широкая полоса пропускания (до 150 Гц). Наличие датчиков температуры в каждом ДУС позволяет обеспечить более точную компенсацию температурных погрешностей. Ко входу микроконтроллера 3 подключен также первый трехосный акселерометр 7, в качестве которого можно использовать трехосный акселерометр ADXL355 компании Analog Devices, либо акселерометр ADXL357. Данные акселерометры обладают малым уровнем шума до 25μg/√Гц, широким диапазоном измерения (до 8g для ADXL355 и до 40g для ADXL357 соответственно). Электронный модуль 2 включает также первый блок питания 8, в качестве которого можно использовать, например, блок LDO ADP1712AUJZ-3.3-R7 компании Analog Devices. При этом первый датчик угловой скорости по оси X 4, первый датчик угловой скорости по оси Y 5, первый датчик угловой скорости по оси Z 6 и первый трехосный акселерометр 7 подключены к первому блоку питания 8. Выход микроконтроллера 3 может быть осуществлен посредством интерфейса 9, который может быть реализован на базе микросхемы FT230XQ-R компании FTDIChip. В качестве отличительных признаков в электронный модуль 2 введены второй датчик угловой скорости по оси X 10, второй датчик угловой скорости по оси Y 11 и второй датчик угловой скорости по оси Z 12, в качестве которых можно также использовать датчики CRM 100 компании Silicon Sensing. В электронный модуль 3 включен также второй трехосный акселерометр 13, в качестве которого можно также использовать трехосный акселерометр ADXL355 компании Analog Devices, либо акселерометр ADXL357. В электронный модуль 2 включен также второй блок питания 14, в качестве которого можно использовать блок ADM7170ACPZ-3.3-R компании Analog Devices.
При этом второй датчик угловой скорости по оси X 10, второй датчик угловой скорости по оси Y 11, второй датчик угловой скорости по оси Z 12 и второй акселерометр 13 подключены ко входам микроконтроллера 3 и к первому блоку питания 8. Причем второй блок питания 14 подключен к микроконтроллеру 3.
Существует вариант, в котором в электронный модуль 2 включен аккумулятор 15, подключенный к первому блоку питания 8 и второму блоку питания 14. В качестве аккумулятора 15 можно использовать литий-полимерный аккумулятор LP232635 (130 мАч, 3.7 В).
Существует также вариант, в котором в устройство введен, по меньшей мере, один сонар 16, подключенный к микроконтроллеру 3 и расположенный внутри корпуса 1, выполненного звукопроницаемым. Это может быть обеспечено посредством использования решетчатого корпуса 1 (не показано). В качестве сонара 16 можно использовать СН-201 компании TDK. Количество сонаров может быть в диапазоне от 1 до 10, их число обусловлено спецификой применения устройства (подводное, воздушное, наземное применения, навигация в замкнутых пространствах).
Существует также вариант, в котором в электронный модуль 2 введен радиоинтерфейс 17, подключенный к микроконтроллеру 3. В качестве радиоинтерфейса 17 можно использовать приемопередатчик AT86RF231-ZF компании Microchip Technology.
Существует также вариант, в котором в электронный модуль 2 введен трехосный магнитометр 18, сопряженный с микроконтроллером 3 и подключенный к первому блоку питания 8. В качестве магнитометра 18 можно использовать BM1422AGMV от компании ROHM semiconductor. При этом корпус 1 должен быть выполнен магнитопроницаемым. В качестве материала корпуса 1 можно использовать полиуретан Ноакаст 700 (крышка корпуса, не показано) и алюминиевый сплав В95Т1 (основание, не показано).
Существует также вариант, в котором в корпусе 1 выполнено, по меньшей мере, одно отверстие 19 (фиг. 2), геометрическое сопряженное с, по меньшей мере, одним сонаром 16. При этом сонар 16 может быть закреплен на внутренней поверхности корпуса 1 и отверстие 19 может иметь диаметр в диапазоне от 0,2 мм до 3 мм.
Существует также вариант, в котором, по меньшей мере, один сонар 16 (фиг. 3) расположен за пределом корпуса 1. Он может быть закреплен на корпусе объекта-носителя (не показан), пространственная ориентация которого определяется заявленным устройством. Возможен также вариант, в котором, по меньшей мере, один сонар 16 расположен внутри корпуса 1 и одновременно, по меньшей мере, один сонар 16 расположен за пределом корпуса 1 (не показано).
Дополнительно может быть реализован выход по второму интерфейсу 20 RS-232 на базе микросхемы ADM3202 компании Analog Devices.
Для изоляции цифрового выхода 21 по интерфейсу 9 может быть применена микросхема ADuM3160BRWZ.
Устройство для определения углов пространственной ориентации динамических и статических объектов работает следующим образом. Устройство устанавливают на объект-носитель (не показан), ориентацию которого необходимого определять и подключают к бортовому питанию объекта-носителя. Первый блок питания 8 осуществляет питание датчиков угловых скоростей и акселерометров. Второй блок питания 14 осуществляет питание микроконтроллера 3. Датчики угловой скорости измеряют угловую скорость подвижного объекта-носителя по трем взаимоортогональным осям, информация с датчиков поступает в микроконтроллер 3. Акселерометры измеряют линейное ускорение по трем взаимоортогональным осям. Информация с акселерометров поступает в микроконтроллер 3. В микроконтроллере 3 с помощью математически реализованного фильтра Калмана осуществляется интегрирование показаний с датчиков угловой скорости и линейного ускорения с целью получения значений углов пространственной ориентации подвижного объекта-носителя. Для определения углов пространственной ориентации статического объекта-носителя (когда угловые скорости и линейные ускорения объекта-носителя настолько малы, что их значениями можно пренебречь), используются показания только акселерометров, на основе показаний которых измеряются углы отклонения статического объекта-носителя от вектора силы тяжести Земли. Далее информация об углах пространственной ориентации поступает на микросхему преобразования интерфейса 9. Информацию с цифрового выхода устройства для определения пространственной ориентации динамических и статических объектов-носителей поступает входы внешних устройств (не показаны), которые обеспечивают навигацию, управление двигателями подвижных частей беспилотных и/или автономных роботехнических комплексов.
Дублирование датчиков угловой скорости (ДУС) позволяет реализовать два режима работы устройства для определения углов пространственной ориентации динамических и статических объектов-носителей (далее - УПО). В режиме повышения точности выходные сигналы с ДУС используются в дифференциальном режиме, что позволяет снизить нестабильность нуля в запуске и уровень шумов, уменьшить чувствительность к изменению температуры среды, механическим ударам и вибрации. В режиме расширения динамического диапазона два ДУС на каждой оси работают с разными диапазонами измерения, что позволяет более точно измерять медленное вращение подвижного объекта-носителя, не теряя при этом информацию в случае резкого увеличения угловой скорости.
В одном из вариантов используют аккумулятор 15 для обеспечения бесперебойного питания в случае отсутствия внешнего бортового питания, что повышает надежность устройства.
Существует также вариант, в котором используется сонар 16. Сонар 16 посылает ультразвуковой импульс, принимает отраженный сигнал и по разнице во времени между ними определяет расстояние до объекта (не показан), принятого за ориентир или поверхности, например, дна водоема, стен помещения, земной поверхности. Информация с сонара 16 поступает в микроконтроллер 3, в котором обрабатывается вместе с информацией от ДУС и акселерометров с целью получения углов пространственной ориентации. В том случае, если необходимо определять расстояния до более чем одной поверхности, например, расстояния до стен помещения, целесообразно применять два и более сонаров.
Существует также вариант, в котором используют радиоинтерфейс 17. Например тогда, когда устройство для определения углов пространственной ориентации установлено на объекты-носители, информацию, о параметрах движения (или положения в пространстве) которых необходимо передавать на устройства вне объекта-носителя (не показаны), например, для удаленного управления объектом-носителем, или в других случаях, когда другой интерфейс неисправен или его использование невозможно.
Существует также вариант, в котором используют трехосный магнитометр 18, который измеряет вектор магнитного поля Земли в связанной с объектом-носителем системе координат. С помощью информации от магнитометра 18 в микроконтроллере 3 осуществляется коррекция значений углов курса объекта-носителя.
Для беспрепятственного распространения ультразвуковых импульсов, излучаемых сонаром 16, в корпусе 1 УПО выполнено, по меньшей мере, одно отверстие 19 (фиг. 2), сопряженное с, по меньшей мере, одним сонаром 16.
В зависимости от конструкции подвижного объекта-носителя, ориентацию которого необходимого определять, по меньшей мере, один сонар 16 (фиг. 3) может быть установлен вне корпуса УПО. Например, это необходимо сделать, когда УПО расположен внутри корпуса подвижного объекта-носителя (не показан), ориентацию которого необходимого определять и корпус данного подвижного объекта-носителя будет препятствовать распространению ультразвуковых импульсов с сонара 16.
Технические результаты
То, что в электронный модуль 2 введены второй датчик угловой скорости по оси X 10, второй датчик угловой скорости по оси Y 11, второй датчик угловой скорости по оси Z 12, второй трехосный акселерометр 13 и второй блок питания 14, при этом второй датчик угловой скорости по оси X 10, второй датчик угловой скорости по оси Y 11, второй датчик угловой скорости по оси Z 12 и второй акселерометр 13 подключены ко входам микроконтроллера 3 и к первому блоку питания 8, а второй блок питания 14 подключен к микроконтроллеру 3 приводит к расширению возможности измерения параметров подвижных объектов-носителей, что приводит к повышению точности измерения пространственной ориентации и повышению надежности функционирования устройства. Повышение точности обеспечивается за счет того, что выходные сигналы ДУС используются в дифференциальном режиме, что позволяет снизить нестабильность нуля в запуске и уровень шумов, уменьшить чувствительность к изменению температуры среды, механическим ударам и вибрации. В режиме расширения динамического диапазона два ДУС на каждой оси работают с разными диапазонами измерения, что позволяет более точно измерять медленное вращение подвижного объекта-носителя, не теряя при этом информацию в случае резкого увеличения угловой скорости. В случае со статическими объектами-носителями, применения акселерометров в дифференциальном режиме позволяет снизить уровень шумов, умеьшить чувствительность к изменению температуры среды, ударам и вибрациям. Надежность функционирования устройства обеспечивается наличием дублирования: двух ДУС для каждой оси измерения и двух трехосных акселерометров, что позволяет сохранить работоспособность в случае отказа одного из датчиков на каждую ось измерения.
То, что в электронный модуль 2 включен аккумулятор 15, подключенный к первому блоку питания 8 и второму блоку питания 14, приводит к повышению надежности функционирования устройства за счет возможности его автономной работы.
То, что в устройство введен, по меньшей мере, один сонар 16, подключенный к микроконтроллеру 3 и расположенный внутри корпуса 1, выполненного звукопроницаемым, приводит к повышению точности измерения пространственной ориентации подвижных объектов-носителей. Это обеспечивается за счет определения расстояний до поверхностей и объектов, принятых за ориентиры. Также наличие сонаров приводит к повышению надежности за счет возможности определения препятствий на пути движения подвижного объекта-носителя.
То, что в электронный модуль 2 введен радиоинтерфейс 17, подключенный к микроконтроллеру 3, приводит к повышению надежности функционирования устройства, за счет создание дополнительного интерфейса взаимодействия, который может использоваться в случаях, когда интерфейс 9 неисправен или его использование невозможно. Также обеспечивается повышение точности измерения пространственной ориентации за счет возможности приема сигналов с космических аппаратов систем спутниковой навигации.
То, что в электронный модуль 2 введен трехосный магнитометр 18, сопряженный с микроконтроллером 3 и подключенный к первому блоку питания 8, при этом корпус 1 выполнен магнитопроницаемым, что приводит к повышению точности измерения пространственной ориентации подвижного объекта-носителя. Это обеспечивается за счет коррекции курса на основе измерений вектора магнитного поля Земли в связанной с объектом-носителем системе координат. Также наличие трехосного магнитометра 18 приводит к повышению надежности, за счет возможности определения курса подвижного объекта-носителя в случае отказа ДУС.
То, что в устройство введен, по меньшей мере, один сонар 16, подключенный к микроконтроллеру 3 и расположенный внутри корпуса 1, при этом в корпусе 1 выполнено, по меньшей мере, одно отверстие 19, геометрическое сопряженное с, по меньшей мере, одним сонаром 16. приводит к повышению точности измерения пространственной ориентации подвижных объектов-носителей. Это обеспечивается за счет устранения препятствий для распространения ультразвуковых импульсов, излучаемых сонаром 16.
То, что в устройство введен, по меньшей мере, один сонар 16, подключенный к микроконтроллеру 3, при этом, по меньшей мере, один сонар 16 расположен за пределами корпуса 1 приводит к повышению точности измерения пространственной ориентации подвижных объектов-носителей. Это обеспечивается за счет расположения сонара 16 на оптимальных с точки зрения применения сонара(ов) поверхностях подвижного объекта-носителя, пространственную ориентацию которого определяет УПО. Также, наличие установленных таким образом сонаров, приводит к повышению надежности за счет возможности определения препятствий на пути движения подвижного объекта-носителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения углов пространственной ориентации динамических и статических объектов | 2022 |
|
RU2795261C1 |
| Устройство для определения углов крена, тангажа и истинного курса | 2024 |
|
RU2829601C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ СИГНАЛОВ ПЕЛЕНГОВАНИЯ ОБЪЕКТА ВИЗИРОВАНИЯ ИНЕРЦИАЛЬНОГО И РАДИОЛОКАЦИОННОГО ДИСКРИМИНАТОРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488137C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ПРИНИМАЕМЫХ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ ОБЛУЧАЕМОГО ОБЪЕКТА ВИЗИРОВАНИЯ, С ОДНОВРЕМЕННЫМ ЕГО ИНЕРЦИАЛЬНЫМ ПЕЛЕНГОВАНИЕМ И ИНЕРЦИАЛЬНЫМ АВТОСОПРОВОЖДЕНИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2526790C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| ДАТЧИК КРЕНА И ТАНГАЖА | 2018 |
|
RU2682589C1 |
| Спутниковая инерциальная навигационная система для станций спутниковой связи | 2024 |
|
RU2836126C1 |
| Способ повышения точности калибровки блока микромеханических датчиков угловой скорости | 2019 |
|
RU2727344C1 |
| Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков ДУС | 2019 |
|
RU2718142C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
Изобретение относится к области приборостроения и может быть использовано в бесплатформенных инерциальных системах навигации, в частности в бесплатформенных системах ориентации, применяемых, например, в беспилотных автономных робототехнических комплексах. Сущность изобретения заключается в том, что в электронный модуль введены второй датчик угловой скорости по оси X, второй датчик угловой скорости по оси Y, второй датчик угловой скорости по оси Z, второй трехосный акселерометр и второй блок питания, при этом второй датчик угловой скорости по оси X, второй датчик угловой скорости по оси Y, второй датчик угловой скорости по оси Z и второй акселерометр подключены ко входам микроконтроллера и к первому блоку питания, а второй блок питания подключен к микроконтроллеру. Технический результат изобретения заключается в расширении возможности измерения параметров подвижных объектов-носителей и статических объектов-носителей, что приводит к повышению точности измерения пространственной ориентации и повышению надежности функционирования устройства. 2 з.п. ф-лы, 3 ил.
1. Устройство для определения углов пространственной ориентации динамических и статических объектов, содержащее корпус, в котором установлен электронный модуль, включающий микроконтроллер, ко входам которого подключены первый датчик угловой скорости по оси X, первый датчик угловой скорости по оси Y, первый датчик угловой скорости по оси Z и первый трехосный акселерометр, включающий также первый блок питания, при этом первый датчик угловой скорости по оси X, первый датчик угловой скорости по оси Y, первый датчик угловой скорости по оси Z и первый трехосный акселерометр подключены к первому блоку питания, в электронный модуль введены второй датчик угловой скорости по оси X, второй датчик угловой скорости по оси Y, второй датчик угловой скорости по оси Z, второй трехосный акселерометр и второй блок питания, при этом второй датчик угловой скорости по оси X, второй датчик угловой скорости по оси Y, второй датчик угловой скорости по оси Z и второй акселерометр подключены ко входам микроконтроллера и к первому блоку питания, а второй блок питания подключен к микроконтроллеру, отличающееся тем, что в него введен по меньшей мере один сонар, подключенный к микроконтроллеру и расположенный внутри корпуса, при этом в корпусе выполнено по меньшей мере одно отверстие, геометрически сопряженное с по меньшей мере одним сонаром.
2. Устройство по п. 1, отличающееся тем, что в электронный модуль включен аккумулятор, подключенный к первому блоку питания и второму блоку питания.
3. Устройство по п. 1, отличающееся тем, что в него введен по меньшей мере один сонар, подключенный к микроконтроллеру, при этом по меньшей мере один сонар расположен за пределами корпуса.
| US 8239162 B2, 07.08.2012 | |||
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И КОМПЛЕКС АВИАНАБЛЮДЕНИЯ ДЛЯ НЕГО | 2012 |
|
RU2518440C2 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Адаптивная бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2647205C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2602342C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |

