Область техники, к которой относится изобретение
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) обнаружения и (или) сопровождения целей.
Уровень техники
Известен способ амплитудного моноимпульсного пеленгования, описанный в [1, с. 511] и применяемый в РЛС обнаружения и сопровождения целей. В соответствии с ним в каждой плоскости наблюдения организуется моноимпульсная пеленгационная пара (МИПП), состоящая из двух угловых датчиков. Каждый датчик представляет собой устройство, состоящее из приемной диаграммы направленности антенны (ДНА) и устройства обработки (УО) принятых этой ДНА сигналов. Соответствующие параметры ДНА и УО всех датчиков одинаковы. ДНА датчиков МИПП развернуты относительного равносигнального направления (РСН) на угол ±θo (фиг. 1). Процесс измерения угловой координаты происходит в два этапа. На первом этапе вычисляется мультипликативное
или аддитивное отношение
где U1 и U2 - амплитуды сигналов на выходе УО первого и второго датчиков МИПП; θ - угловая координата цели в данной плоскости относительно РСН. Мультипликативное и аддитивное отношения содержат информацию об угловой координате цели в данной плоскости и не зависят от величины принятого сигнала. Пеленгационная характеристика МИПП (зависимость величины аддитивного или мультипликативного отношения принятых сигналов от углового положения цели относительно РСН) при одинаковости параметров УО и ДНА является непрерывной монотонной нечетной функцией относительно РСН и не зависит от величины каждого принятого сигнала и, следовательно, может быть использована для определения неизвестных угловой координаты.
На втором этапе по обратной пеленгационной характеристике с использованием в качестве аргумента величины рассчитанного аддитивного или мультипликативного отношения производится вычисление угловой координаты в плоскости, к которой относится данная МИПП.
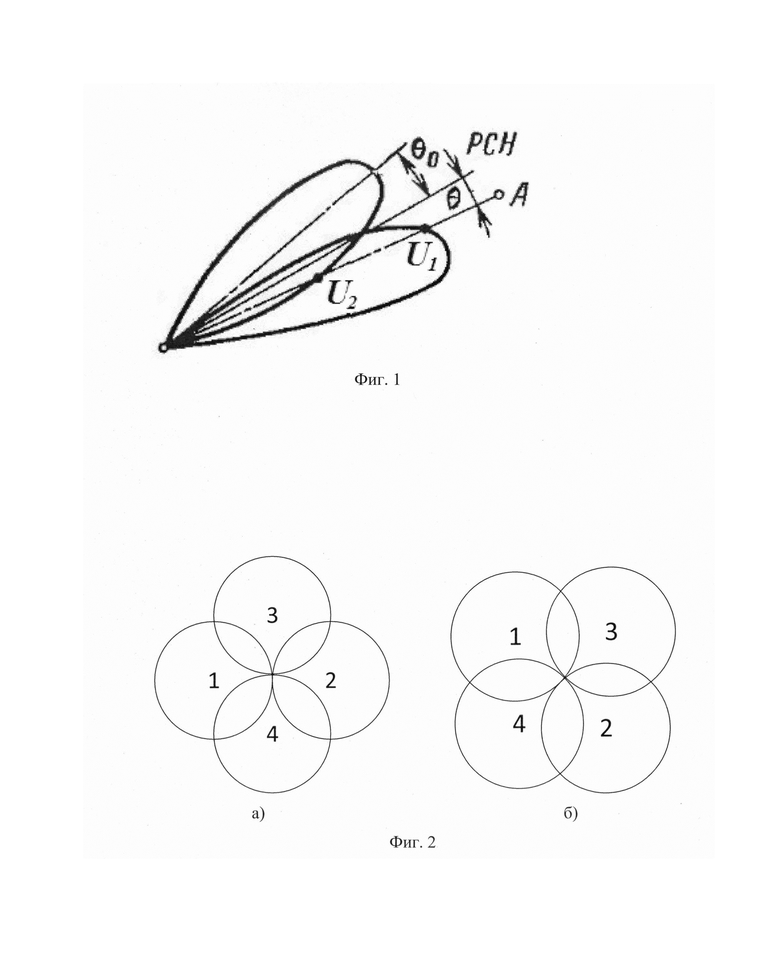
Для пеленгации в двух плоскостях подобные МИПП организуются в каждой плоскости. Приемные ДНА в одной МИПП могут быть смещены в азимутальной плоскости, другой МИПП - в угломестной плоскости, образуя так называемую прямую пеленгационную связку, либо в каждой МИПП одновременно и в азимутальной и угломестной плоскостях, образуя так называемую, косую пеленгационную связку (2, с. 14). Вид этих связок в картинной плоскости приведен на фиг. 2. Вид пеленгационной связки не влияет на принцип работы способа. В случае косой связки добавляется пересчет измеренных угловых координат в заданную систему координат.
Данный способ выбран в качестве прототипа.
К недостаткам способа-прототипа относится:
- требование формирования четырех одинаковых приемных ДНА антенны (по две в каждой плоскости);
- ограничение зоны однозначного измерения угловой координаты угловым разнесением осей приемных ДНА относительно РСН.
Раскрытие сущности изобретения
Техническим результатом изобретения является уменьшение количества требуемых приемных ДНА амплитудных датчиков, снятие требования равенства параметров этих приемных ДНА и расширение рабочей зоны пеленгации.
Данный технический результат достигается путем замены двухэтапного расчета угловых координат по функции обратной пеленгационной характеристике с использованием в качестве аргумента величины предварительно рассчитанного мультипликативного или аддитивного отношения решением системы уравнений, относительно неизвестных угловых координат цели, составленных на основе основного уравнения радиолокации.
Запишем основное уравнение радиолокации [3, с. 28] относительно мощности принятого антенной сигнала без учета влияния Земли и потерь при обработке в виде

где Рr - мощность сигнала на выходе приемной антенны РЛС; Pt - мощность излучения передатчика РЛС; Gt(α, β) - коэффициент усиления передающей антенны в направлении цели; Gr(α,β) - коэффициент усиления приемной антенны в направлении цели; R - расстояние до цели; λ - длина волны; α, β - угловые координаты цели относительно оси ДНА в соответствующих плоскостях; σ - эффективная площадь рассеяния цели (ЭПР).
Амплитуда синусоидального напряжения равна

где Р - мощность. Тогда с учетом (2) и усиления сигнала в УО углового датчика амплитуда принятого сигнала на выходе УО будет равна

где Ur - амплитуда сигнала на выходе УО углового датчика; ku - коэффициент усиления этого УО.
Выражение (3) перепишем в виде

где  - коэффициент пропорциональности, учитывающий параметры РЛС и цели.
- коэффициент пропорциональности, учитывающий параметры РЛС и цели.
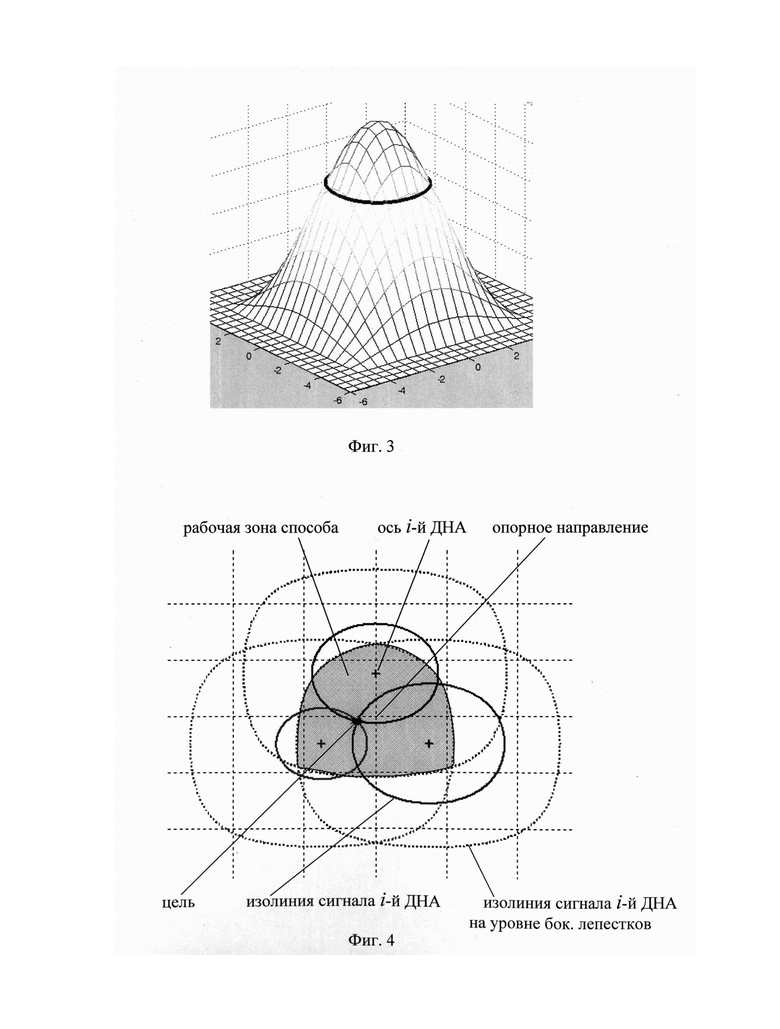
Выражение (4) является уравнением изолинии равных амплитуд принятого сигнала от цели с ЭПР σ, находящейся на дальности R и с угловыми координатами относительно оси ДНА (α,β), которая наблюдается РЛС, в состав которой входит УО, с параметрами Pt, Gt(α,β), Gr(α,β), λ, ku (фиг. 3). Данная изолиния является линией положения (ЛП) цели [4, с. 7] т.е. линией, на которой рассчитанная или измеренная амплитуда сигнала, отраженного от цели, определяет угловое местоположение этой цели. Другими словами, цель, амплитуда сигнала от которой рассчитана или измерена, может находиться в любой точке пространства, угловые координаты которой совпадают с координатами точек этой изолинии.
Для нахождения координат точек этой ЛП необходимо измерить амплитуду сигнала Urizm на выходе УО и сравнить ее с расчетной, т.е. решить уравнение

в котором три неизвестных: коэффициент пропорциональности F и искомые угловые координаты (α,β) относительно оси ДНА. Зависимость коэффициента усиления приемной ДНА Gr от угловых координат полагаем известной, поскольку известны форма и параметры приемной ДНА.
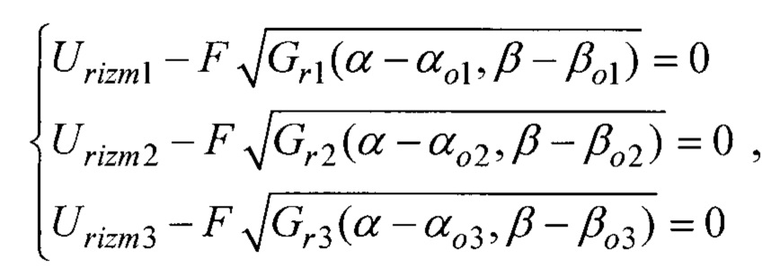
Уравнение (5) можно составить для любого углового датчика, состоящего из приемной ДНА и УО. Так как коэффициент пропорциональности будет один и тот же для всех ДНА, которые расположены в одной точке относительно цели, то увеличение количества уравнений (5) не увеличивает количества неизвестных. Оно остается равным трем. Следовательно, для их нахождения необходима система из трех независимых уравнений, каждое для одного углового датчика. Для обеспечения независимости уравнений приемную ДНА каждого датчика необходимо отклонить от заданного опорного направления (ОН), причем величина угла и направление отклонения должны быть индивидуальны для каждого датчика. Другими словами, для нахождения угловых координат необходимо решить систему уравнений

где (α, β) - угловые координаты цели относительно ОН системы приемных ДНА; αoi и βoi - углы отклонения приемной ДНА i-го углового датчика относительно ОН; Gri - коэффициент усиления ДНА i-го датчика; Urizmi - измеренная амплитуда сигнала на выходе i-го датчика; i=1, 2, 3.
Данная система уравнений имеет следующую геометрическую интерпретацию. В картинной плоскости каждая ЛП представляет собой эллипсоподобную кривую (фиг. 4). Поскольку цель находится на ЛП, для нахождения ее угловых координат необходимо несколько пересекающихся ЛП. Если взять две приемные ДНА, отклоненные от ОН, то линии положения пересекутся в двух точках (поскольку ЛП есть эллипсоподобная кривая, а два эллипса, как следует из аналитической геометрии, пересекаются в общем случае в двух точках), и будет иметь место неопределенность. При трех приемных ДНА, отклоненных от ОН таким образом, чтобы их оси проходили через вершины охватывающего ОН треугольника, ЛП пересекутся в одной точке. На фиг. 4 показано результирующее пересечение ЛП по каждому датчику.
Зона однозначного определения угловых координат (рабочая зона) предлагаемого способа ограничивается ЛП цели, сигнал от которой превышает сигнал от первых боковых лепестков ДНА, и имеет вид, показанный на фиг. 4 (затушеванная зона). Подбирая форму и параметры ДНА можно изменять размеры этой зоны.
Параметры приемных ДНА и величины углов и направления отклонения осей ДНА от РСН должны выбираться таким образом, чтобы углы пересечения ЛП были максимальны [4, с. 25], а также обеспечивались максимальное отношение сигнал/шум сигналов, от которого зависит точность пеленгования, и требуемая величина рабочей зоны. Ориентация системы приемных ДНА может быть произвольной.
Для успешного решения системы (6) математическое выражение для расчета коэффициента усиления приемной ДНА должно быть известно: например, в виде массива заранее рассчитанных значений, в виде аппроксимирующей формулы или расчетных формул приемных ДНА.
Краткое описание чертежей
Фиг. 1. Расположение приемных ДНА МИПП в одной плоскости.
Фиг. 2. Варианты пеленгационных связок: а) прямая, б) косая.
Фиг. 3. Изолиния отраженного сигнала на главном лепестке приемной ДНА.
Фиг. 4. Графики линий положения цели для приемных ДНА трех угловых датчиков (сплошная линия), графики линий положения цели на уровне боковых лепестков этих ДНА (пунктирная линия) и график рабочей зоны способа - зоны однозначного определения угловых координат цели (штриховка).
Осуществление изобретения
Реализация заявляемого способа амплитудного моноимпульсного пеленгования возможна на существующих в настоящее время и разрабатываемых РЛС с фазированными антенными решетками и обработкой принятых радиосигналов на ЭВМ. В существующих РЛС, в которых способ амплитудного моноимпульсного пеленгования уже реализован, для осуществления предлагаемого способа необходимо перепрограммирование программного обеспечения (ПО) в части замены программного компонента, в котором осуществляется расчет пеленгационной характеристики и определение угловых координат целей, на программный компонент, в котором производится решение системы уравнений (6), а также перепрограммирование диаграммообразующей системы для изменения числа и углового положения приемных ДНА. В разрабатываемых РЛС должны быть предусмотрены формирование трех приемных ДНА с требуемыми параметрами и угловым положением в пространстве и разработка программного компонента решения системы (6).
Применение предлагаемого способа позволит уменьшить количество приемных ДНА, снять требование равенства их параметров и расширить рабочую зону пеленгации, что повысит эффективность функционирования этих РЛС по назначению.
Для проверки осуществления способа подобное перепрограммирование было произведено на ПО модели существующей РЛС таким образом, что пеленгование производилось параллельно: штатным способом и предлагаемым. Угловое положение и число приемных ДНА не изменялось. Из существующих приемных ДНА составлялись тройки ДНА, по каждой производилось решение уравнения (6), и полученные результаты усреднялись. Имитация отраженных сигналов производилась штатным имитатором фоно-целевой обстановки. Коэффициенты усиления приемных ДНА рассчитывались по аппроксимирующим формулам штатного способа. Расхождения между результатами работы штатного способа измерения угловых координат, реализованного в ПО, и предлагаемого способа находились в допустимых для практики пределах.
Вышеизложенное позволяет сделать вывод о соответствии заявляемого способа амплитудного моноимпульсного пеленгования критерию «промышленная применимость» для изобретения.
Источники информации
1. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М.: Радио и связь, 1984. - 312 с.
2. Ратынский М.В., Порсев В.И. Моноимпульсная пеленгация в РЛС с цифровыми ФАР. - М.: ЛЕНАРД, 2023. - 200 с.
3. Справочник по радиолокации. Т. 1. / Под ред. М. Сколника. - М.: Сов. радио, 1976. - 456 с.
4. Сайбель А.Г. Основы теории точности радиотехнических методов местоопределения. - М.: Сов. радио, 1958. - 56 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала | 2015 |
|
RU2615491C1 |
| Способ определения направления на цель цифровой антенной решеткой моноимпульсной радиолокационной станции | 2021 |
|
RU2761106C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| Фазовый пеленгатор | 2016 |
|
RU2618522C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| Способ измерения углового положения наземных неподвижных радиоконтрастных объектов | 2017 |
|
RU2672092C1 |
Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях обнаружения и сопровождения целей. Техническим результатом изобретения является уменьшение количества требуемых приемных диаграмм направленности антенны (ДНА) амплитудных датчиков, отмена требования равенства параметров этих приемных ДНА и расширение рабочей зоны пеленгации. В заявленном способе применяют три угловых датчика, ДНА которых развернуты относительно опорного направления (ОН) в пространстве таким образом, что оси этих ДНА проходят через вершины охватывающего ОН треугольника, угловые размеры которого и параметры ДНА датчиков выбраны из условия максимизации отношения сигнал/шум принятых сигналов и обеспечения требуемой зоны однозначного измерения координат, измерения амплитуды сигналов на выходе датчиков и решения системы из трех уравнений линий положения цели по соответствующей ДНА относительно (α, β) - искомых угловых координат цели относительно ОН и F - коэффициента пропорциональности, решение которой представляет собой определение угловых координат точки пересечения этих линий положения цели. 4 ил.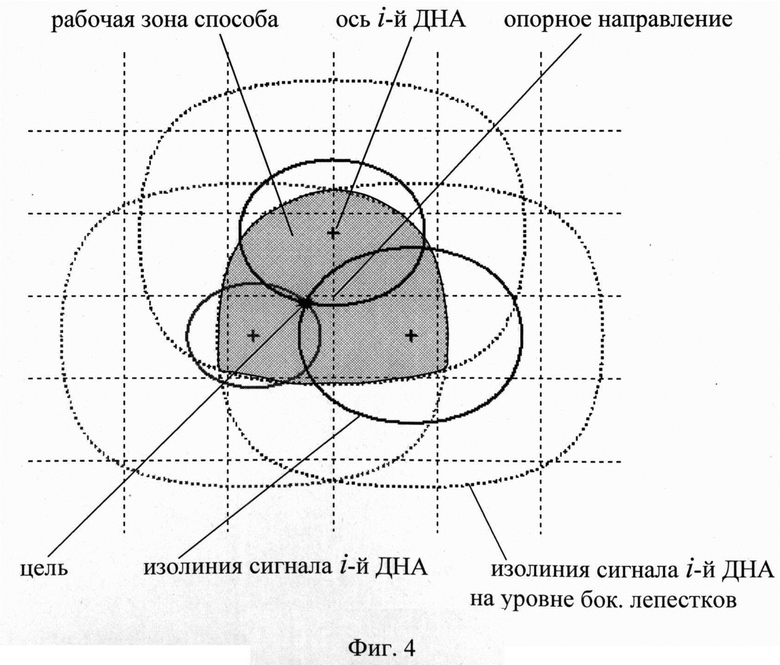
Способ амплитудного моноимпульсного пеленгования, характеризующийся тем, что создают одну моноимпульсную пеленгационную тройку (МИПТ), включающую три амплитудных датчика в составе приемной диаграммы направленности антенны (ДНА) и устройства обработки (УО) отраженных от пеленгуемой цели сигналов каждый, причем параметры УО каждого амплитудного датчика одинаковы, ориентация системы приемных ДНА произвольна, а параметры, углы и направления отклонения приемной ДНА от заданного опорного направления (ОН) индивидуальны для каждого амплитудного датчика и выбраны таким образом, чтобы углы пересечения линий положения цели, представляющих собой изолинии равных амплитуд принятого сигнала от цели, по каждому амплитудному датчику были максимальны, при этом оси ДНА датчиков МИПТ имеют угловые сдвиги относительно ОН в пространстве таким образом, чтобы оси этих ДНА проходили через вершины охватывающего ОН треугольника, угловые размеры которого и параметры ДНА датчиков выбирают из условия максимизации отношения сигнал/шум принятых сигналов и обеспечения требуемой рабочей зоны однозначного измерения угловых координат цели, ограниченной линией положения цели, сигнал от которой превышает сигнал от первых боковых лепестков ДНА, принимают отраженный от пеленгуемой цели сигнал каждым амплитудным датчиком МИПТ, измеряют амплитуду отраженного сигнала и производят расчет угловых координат цели относительно ОН путем решения системы уравнений относительно (α, β) и F
где (α, β) - искомые угловые координаты цели относительно ОН,
Urizmi - измеренная амплитуда сигнала на выходе i-го амплитудного датчика,
F - общий для всех датчиков коэффициент пропорциональности,
αoi и βoi - углы отклонения оси ДНА i-го амплитудного датчика относительно ОН,
Gri - коэффициент усиления ДНА i-го датчика, i=1, 2, 3.
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| РАТЫНСКИЙ М.В., ПОРСЕВ В.И | |||
| Моноимпульсная пеленгация в РЛС с цифровыми ФАР | |||
| - М.: ЛЕНАРД, 2023 | |||
| - С | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| СПОСОБ СОВМЕСТНОГО МОНОИМПУЛЬСНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ПРИНИМАЕМОГО СИГНАЛА И ПЕЛЕНГА ИСТОЧНИКА ЭТОГО СИГНАЛА | 2012 |
|
RU2492500C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ УГЛОВЫХ КООРДИНАТ РАДИОСИГНАЛА В АМПЛИТУДНЫХ МОНОИМПУЛЬСНЫХ ПЕЛЕНГАЦИОННЫХ СИСТЕМАХ | 2016 |
|
RU2625349C1 |
| Способ двухмерного моноимпульсного пеленгования источников радиоизлучений | 2019 |
|
RU2696095C1 |
| Способ повышения точности пеленгования источников радиоизлучения обнаружителем-пеленгатором с многошкальной антенной системой | 2019 |
|
RU2713235C1 |
| ЧИСТЯКОВ В.А | |||
| Моноимпульсный радиопеленгатор с использованием цифровой антенной решетки // Труды МАИ | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |

