Область техники, к которой относится изобретение
Заявляемое изобретение относится к средствам перемещения роботизированных технических комплексов железнодорожного транспорта, а именно к способам перемещения мобильной платформы робототехнического комплекса для роспуска железнодорожного подвижного состава на сортировочной горке.
Уровень техники
Для обеспечения реализации роботизации технологического процесса работы железнодорожной станции необходимо решить задачу обеспечения перемещения мобильной платформы вдоль пути надвига. Вариант реализации перемещения мобильной платформы определяет такие важные технико-эксплуатационные характеристики робототехнического комплекса как скорость перемещения и максимальное ускорение, которые в свою очередь определяют такие важные показатели эффективности роботизации технологического процесса роспуска составов с сортировочной горки как вероятность пропуска отцепа, вероятность неправильного формирования отцепа, а также скорость надвига.
Из уровня техники известен способ перемещения мобильной платформы, реализуемый с использованием известной мобильной робототехнической платформой сверхмалого класса (RU 185354 U1, 03.12.2018, B25J 5/00, B25J 9/00). В способе уточняют местоположение мобильной платформы с использованием энкодеров инерциальной части системы навигации. Выбирают режим управления мобильной платформой. Если выбран ручной режим, передают с использованием защищенного радиоканала приказы с установками скорости и направления движения платформы. Если выбран полуавтоматический вариант управления, передают с использованием защищенного радиоканала приказы, содержащие пространственные координаты опорных точек, а далее осуществляют с использованием системы технического зрения автоматическое обнаружение препятствий и формирование управляющих приказов для их обхода. Если выбран автоматический режим работы, то осуществляют движение мобильной платформы по заранее заданному маршруту с автоматическим обнаружением препятствий с использованием системы технического зрения и формированием управляющих приказов для их обхода. Воспринимают управляющие приказы с использованием системы управления платформой и формируют команды к электродвигателям.
К недостатку известного способа перемещения мобильной платформы, реализуемый с использованием известной мобильной робототехнической платформы сверхмалого класса следует отнести сложность реализации синхронизации скорости движения с надвигаемым железнодорожным подвижным составом.
Наиболее близким по своей технической сущности к заявляемому изобретению является устройство автоматического расцепления вагонов (RU 216043 U1, 16.01.2023, B61G 7/04), реализующее способ перемещения мобильной платформы. Способ заключается в том, что формируют сигнал управления двигателем мобильной платформы на начало движения. От системы технического зрения получают информацию о достижении заданной точки и выравнивании скорости мобильной платформы. После окончания расцепки формируют команду на торможение и движение назад в исходное положения для следующей отцепки. При этом перемещение мобильной платформы осуществляют внутри колеи с использованием в качестве направляющих ходовых рельсов железнодорожного пути.
К недостаткам известного технического решения следует отнести сложность организации технического обслуживания и взаимодействия с оборудованием робототехнического комплекса, а также неудобство синхронизации скорости движения с надвигаемым железнодорожным подвижным составом.
Раскрытие изобретения
Технический результат изобретения, заключается в обеспечении синхронизации с заданной скоростью надвига железнодорожного подвижного состава.
Технический результат достигается тем, что в способе перемещения мобильной платформы робототехнического комплекса для роспуска железнодорожного подвижного состава на сортировочной горке мобильная платформа оснащена системой технического зрения, манипулятором с соответствующим электроприводом для расцепки состава и механизмом перемещения платформы вдоль железнодорожной колеи. Способ включает в себя непрерывное опрашивание состояния внешнего путевого стационарного датчика или системы технического зрения на предмет обнаружения начала движения подвижного состава и определение пространственных координат мобильной платформы вдоль железнодорожной колеи. При этом в случае обнаружения упомянутого начала движения формируют сигнал, инициирующий начало движения мобильной платформы в направлении, совпадающем с направлением движения надвигаемого железнодорожного подвижного состава, в соответствии с которым осуществляют перемещение мобильной платформы. При совпадении пространственных координат мобильной платформы и автосцепки упомянутого состава, подлежащей расцепке, осуществляют синхронизацию скорости движения мобильной платформы со скоростью движения упомянутого состава посредством регулирования скорости механизма перемещения платформы по данным, поступающим от системы технического зрения. Причем после выполнения манипулятором заданной расцепки упомянутого состава и его возвращения в транспортировочное положение формируют сигнал, инициирующий остановку мобильной платформы и начало ее движения в направлении, противоположном направлению движения упомянутого состава, в исходное положение.
При этом мобильную платформу размещают на ходовой направляющей балке, расположенной с внешней стороны от железнодорожной колеи. Используют механизм перемещения платформы, выполненный в виде жестко соединенной с платформой ленты гусеничного типа, расположенной на ведущем и ведомом колесах, установленных на противоположных концах ходовой направляющей балки, и электронно-управляемого электропривода, главный вал которого соединен с ведущим колесом с возможностью приведения в движение упомянутой ленты с мобильной платформой. Причем для перемещения мобильной платформы в заданное место расцепки упомянутого состава главный вал электронно-управляемого электропривода приводят во вращение со скоростью, обеспечивающей движение мобильной платформы с максимальной скоростью. При возвращении платформы в исходное положение при ее приближении к границе ходовой направляющей балки на расстояние, соответствующее длине тормозного пути платформы, формируют сигнал остановки мобильной платформы, в соответствии с которым скорость вращения главного вала электронно-управляемого электропривода уменьшают с обеспечением исключения схода мобильной платформы с упомянутой балки.
Краткое описание чертежей
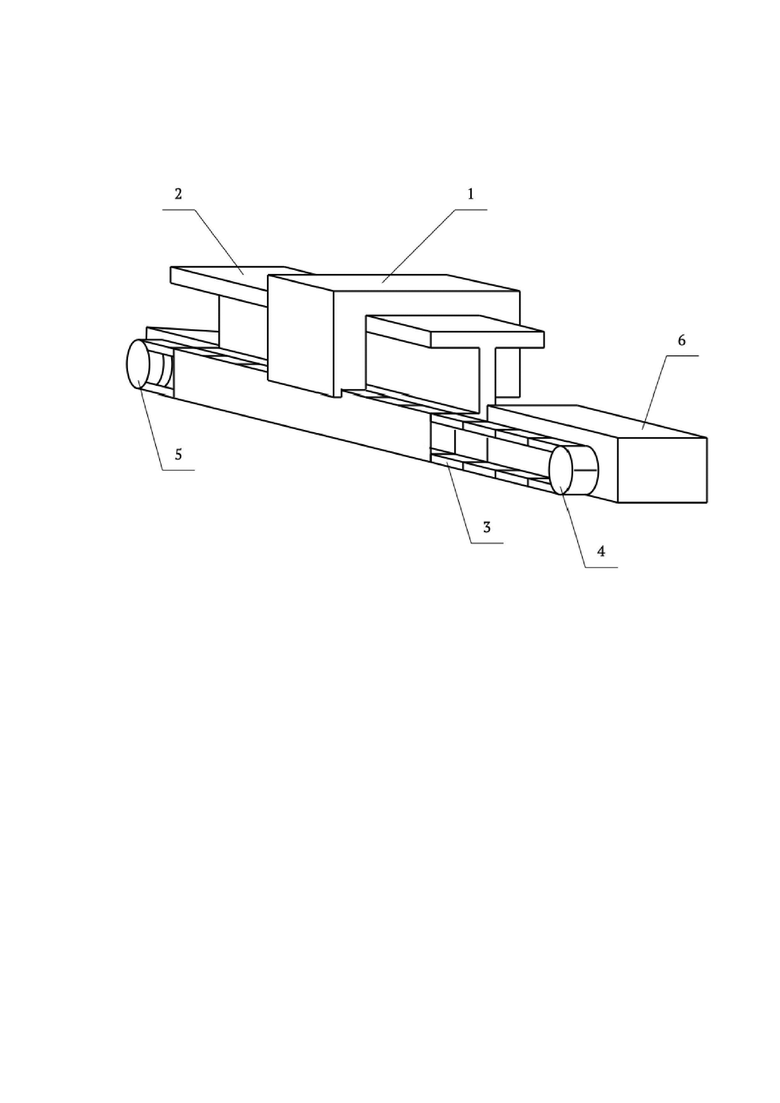
Изобретение поясняется чертежом, на котором схематично показана система перемещения мобильной платформы робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке, реализующая заявляемый способ. Система представляет собой мобильную платформу, которая содержит раму 1 мобильной платформы, удерживаемую за счет своей конструкции на ходовой направляющей балке 2, и жестко соединенную с лентой 3 гусеничного типа, закрепленной на ведущем 4 и ведомом 5 колесах, а также электронно-управляемый электропривод 6 мобильной платформы.
Осуществление изобретения
Система перемещения мобильной платформы робототехнического комплекса для роспуска железнодорожного подвижного состава на сортировочной горке (фигура) содержит раму 1 мобильной платформы, на которой размещена система технического зрения, манипулятор робототехнического комплекса и соответствующий электропривод (на чертеже не показаны), которая удерживается за счет своей конструкции на ходовой направляющей балке 2, расположенной с внешней стороны от железнодорожной колеи и жестко соединенную с лентой 3 гусеничного типа, закрепленной на ведущем 4 и ведомом 5 колесах и электронно-управляемый электропривод 6 мобильной платформы, главный вал которого соединен с ведущим колесом (на чертеже не показан).
Рама 1 мобильной платформы имеет характерную форму, позволяющую ей перемещаться вдоль ходовой направляющей балки 2 и при наличии различных продольных и поперечных нагрузок, возникающих при ее перемещении, не опрокидываться и не сходить с ходовой направляющей балки 2.
Система технического зрения, закрепляемая на раме мобильной платформы (на чертеже не показана), представляет собой известное аппаратно-программное устройство, включающее в себя по крайней мере одну камеру с функцией определения глубины, а также вычислительный модуль (на чертеже не показан), формирующий соответствующие сигналы для взаимодействия с другими компонентами робототехнического комплекса, предназначенного для расцепки железнодорожных подвижных составов на сортировочной горке. Вариант реализации системы технического зрения известен и изложен в RU 208417 U1, 17.12.2021, B61G 7/04.
Внешний путевой стационарный датчик (на чертеже не показан) представляет собой известные устройства, предназначенные для счета осей (вариант технического решения - RU 2206469 С2, 20.06.2003, B61L 1/16).
Манипулятор робототехнического комплекса (на чертеже не показан) представляет собой один или несколько сегментов, обеспечивающих взаимодействие робототехнического комплекса, предназначенного для роспуска железнодорожных подвижных составов, с цепью расцепного привода автосцепки. Электропривод манипулятора представляет собой совокупность электрического двигателя и системы распределительных шестерней и редукторов. Реализация манипулятора робототехнического комплекса, а также реализация соответствующего привода или системы приводов не является предметом заявляемого изобретения, а потому может быть выбрана любой с учетом собственных требований к конструкции. Вариант реализации манипулятора известен и изложен в RU 208417 U1, 17.12.2021, B61G 7/04.
Под транспортировочным положением манипулятора в настоящем изобретении понимают такое положение манипулятора, при котором никакая его часть не попадает внутрь границы габарита приближения строений.
Под рабочим положением манипулятора в настоящем изобретении понимают такое положение манипулятора, при котором его часть находится внутри границы габарита приближения строений для осуществления технологических операций по взаимодействию с механизмом автосцепки, подлежащей расцепки.
Ходовую направляющую балку 2 выполняют, как правило, прямолинейной, т.е. соответствующей плану и профилю пути надвига, оборудуемого средствами роботизации технологического процесса для роспуска железнодорожных подвижных составов на сортировочной горке. Кроме того, ходовую направляющую балку 2 выполняют непрерывной по всей ее длине путем соединение отдельных ее конструктивных элементов. Ходовую направляющую балку 2, как правило, выполняют в виде двутаврового профиля и размещают с внешней стороны железнодорожной колеи пути надвига.
Лента 3 гусеничного типа представляет собой замкнутую сплошную ленту из шарнирно-соединенных элементов - звеньев. Конструкция звеньев и их соединений выбирается с учетом массо-габаритных характеристик рамы 1 мобильной платформы и установленного на ней оборудования и не является предметом заявляемого изобретения. Ленту 3 гусеничного типа располагают на ведущем 4 и ведомом 5 колесах.
Ведущее 4 и ведомые 5 колеса предназначены для перемотки гусеничной ленты 3. Причем ведущее колесо 4 осуществляет преобразование собственного вращательного движения, задаваемого электроприводом 6, в поступательное перемещение ленты 3 гусеничного типа. Конструктивно ведущее 4 и ведомое 5 колеса представляют собой разновидность профилированного колеса с зубьями, входящими в зацепление с лентой 3 гусеничного типа.
Ведущее 4 и ведомое 5 колеса размещают на противоположных концах ходовой направляющей балки 2. Форма, размер и материал ведущего 4 и ведомого 5 колеса не являются предметом настоящего изобретения и выбираются с учетом особенностей выполнения ленты 3 гусеничного типа.
Электропривод 6 выполнен в виде по крайней мере одного асинхронного тягового электродвигателя, вал которого через редуктор соединяется с главным валом электропривода (на чертеже не показаны). Электропривод имеет электронное управление, позволяющее регулировать скорость вращения вала электродвигателя (на чертеже не показан). Главный вал электропривода 6 соединен с ведущим 4 колесом с возможностью приведения в движение ленты 3 гусеничного типа с закрепленной на ней рамой 1 мобильной платформы.
Способ перемещения мобильной платформы робототехнического комплекса для роспуска железнодорожного подвижного состава на сортировочной горке реализуется следующим образом (фигура). В процессе эксплуатации непрерывно опрашивают состояние внешнего путевого стационарного датчика или системы технического зрения (на чертеже не показаны) на предмет обнаружения условий начала движения и определяют пространственные координаты рамы 1 мобильной платформы вдоль ходовой направляющей балки 2. Условием начала движения является прохождение соответствующей сортировочному листку (документу, определяющему порядок осуществления роспуска железнодорожного данного подвижного состава) колесной пары над внешним путевым стационарным датчиком или автосцепки перед камерами системы технического зрения (на чертежах не показаны).
При обнаружении условий начала движения от внешнего путевого стационарного датчика или от системы технического зрения (на чертежах не показаны): формируют сигнал, инициирующий начало движения мобильной платформы в направлении, совпадающем с направлением движения надвигаемого железнодорожного подвижного состава. С учетом сформированного сигнала, инициирующего начало движения рамы 1 мобильной платформы к месту расцепки железнодорожного подвижного состава (на чертеже не показан) в направлении, совпадающим с направлением движения надвигаемого железнодорожного подвижного состава, приводят в движение с максимальной скоростью главный вал электронно-управляемого электропривода 6 мобильной платформы, который через ведущее колесо 4 приводит в движение ленту 3 гусеничного типа, жестко соединенную с рамой 1 мобильной платформы.
При совпадении пространственных координат движущейся рамы 1 мобильной платформы и автосцепки железнодорожного подвижного состава, подлежащей расцепки (на чертеже не показана), осуществляют синхронизацию скорости движения рамы 1 мобильной платформы и надвигаемого железнодорожного подвижного состава за счет регулирования скорости вращения главного вала электронно-управляемого электропривода 6 мобильной платформы по данным, поступающим от системы технического зрения (на чертеже не показана). Синхронизация обеспечивает повышение таких важных показателей эффективности роботизации технологического процесса роспуска составов с сортировочной горки как вероятность пропуска отцепа, вероятность неправильного формирования отцепа, а также скорость надвига, т.е. повышается точность и скорость выполнения технологической операции манипулятором. При синхронном движении мобильной платформы и надвигаемого железнодорожного подвижного состава осуществляется перевод манипулятора робототехнического комплекса в рабочее положение и его взаимодействие с механизмом автосцепки, подлежащей расцепке.
По окончании расцепки при движении рамы 1 мобильной платформы после возвращения манипулятора робототехнического комплекса (на чертеже не показан) в транспортировочное положение формируют сигнал, инициирующий остановку рамы 1 мобильной платформы, и начало ее движения в направлении, противоположном направлению движения надвигаемого железнодорожного подвижного состава. Использование такого алгоритма действий позволяет сократить протяженность ходовой направляющей балки 2 при обеспечении тех же показателей качества функционирования робототехнического комплекса.
При приближении рамы 1 мобильной платформы к границе ходовой направляющей балки 2 на расстояние, соответствующее длине тормозного пути рамы 1, формируют сигнал остановки рамы 1 мобильной платформы в соответствии с которым скорость вращения главного вала электронно-управляемого электропривода 6 мобильной платформы уменьшают с обеспечением возможности схода рамы 1 мобильной платформы с ходовой направляющей балки 2.
С учетом вышеизложенного достигается обеспечение синхронизацией с заданной скоростью надвига железнодорожного подвижного состава.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАСЦЕПЛЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2020 |
|
RU2732676C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РАСЦЕПЛЕНИЯ АВТОСЦЕПОК ДВИЖУЩИХСЯ ВАГОНОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2728968C1 |
| СИСТЕМА АВТОРАСЦЕПКИ ВАГОНОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2010 |
|
RU2450946C1 |
| Система обеспечения электропитанием робототехнического комплекса, предназначенного для роспуска железнодорожного подвижного состава на сортировочной горке | 2024 |
|
RU2835855C1 |
| УСТРОЙСТВО АВТОРАСЦЕПКИ ГРУЗОВЫХ ВАГОНОВ | 2008 |
|
RU2379206C1 |
| Способ управления технологическим процессом сортировочной станции с контролем и перераспределением трудовых ресурсов и система для его осуществления | 2024 |
|
RU2839171C1 |
| Устройство для расцепления железнодорожных вагонов | 1981 |
|
SU960059A1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| Способ и система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки | 2019 |
|
RU2705035C1 |
| Устройство для автоматического расцепления железнодорожных вагонов | 1980 |
|
SU901125A1 |
Изобретение относится к области робототехники и может быть использовано в робототехническом комплексе, предназначенном для роспуска железнодорожных подвижных составов на сортировочной горке, причем комплекс включает в себя мобильную платформу, которую размещают на ходовой направляющей балке, расположенной с внешней стороны от железнодорожной колеи, систему технического зрения, манипулятор с соответствующим электроприводом для расцепки состава и механизм перемещения платформы вдоль железнодорожной колеи, выполненный в виде жестко соединенной с платформой ленты гусеничного типа, расположенной на ведущем и ведомом колесах, установленных на противоположных концах ходовой направляющей балки, и управляемого электропривода, вал которого соединен с ведущим колесом с возможностью приведения в движение упомянутой ленты с мобильной платформой. Для перемещения мобильной платформы непрерывно опрашивают состояние внешнего путевого стационарного датчика или системы технического зрения на предмет обнаружения начала движения подвижного состава и определяют пространственные координаты мобильной платформы вдоль железнодорожной колеи, при этом в случае обнаружения начала движения формируют сигнал, инициирующий начало движения мобильной платформы в направлении, совпадающем с направлением движения надвигаемого железнодорожного подвижного состава, в соответствии с которым осуществляют перемещение мобильной платформы, а при совпадении пространственных координат мобильной платформы и автосцепки упомянутого состава, подлежащей расцепке, осуществляют синхронизацию скорости движения мобильной платформы со скоростью движения состава. После выполнения манипулятором заданной расцепки состава формируют сигнал, инициирующий остановку мобильной платформы и начало ее движения в направлении, противоположном направлению движения упомянутого состава, в исходное положение. Использование изобретения позволяет ускорить проведение роспуска составов и повысить надежность этого процесса. 1 ил.
Способ перемещения мобильной платформы робототехнического комплекса для роспуска железнодорожного подвижного состава на сортировочной горке, причем мобильная платформа оснащена системой технического зрения, манипулятором с соответствующим электроприводом для расцепки состава и механизмом перемещения платформы вдоль железнодорожной колеи, включающий непрерывное опрашивание состояния внешнего путевого стационарного датчика или системы технического зрения на предмет обнаружения начала движения подвижного состава и определение пространственных координат мобильной платформы вдоль железнодорожной колеи, при этом в случае обнаружения упомянутого начала движения формируют сигнал, инициирующий начало движения мобильной платформы в направлении, совпадающем с направлением движения надвигаемого железнодорожного подвижного состава, в соответствии с которым осуществляют перемещение мобильной платформы, а при совпадении пространственных координат мобильной платформы и автосцепки упомянутого состава, подлежащей расцепке, осуществляют синхронизацию скорости движения мобильной платформы со скоростью движения упомянутого состава посредством регулирования скорости механизма перемещения платформы по данным, поступающим от системы технического зрения, причем после выполнения манипулятором заданной расцепки упомянутого состава и его возвращения в транспортировочное положение формируют сигнал, инициирующий остановку мобильной платформы и начало ее движения в направлении, противоположном направлению движения упомянутого состава, в исходное положение, отличающийся тем, что мобильную платформу размещают на ходовой направляющей балке, расположенной с внешней стороны от железнодорожной колеи, при этом используют механизм перемещения платформы, выполненный в виде жестко соединенной с платформой ленты гусеничного типа, расположенной на ведущем и ведомом колесах, установленных на противоположных концах ходовой направляющей балки, и электронно-управляемого электропривода, главный вал которого соединен с ведущим колесом с возможностью приведения в движение упомянутой ленты с мобильной платформой, причем для перемещения мобильной платформы в заданное место расцепки упомянутого состава главный вал электронно-управляемого электропривода приводят во вращение со скоростью, обеспечивающей движение мобильной платформы с максимальной скоростью, а при возвращении платформы в исходное положение при ее приближении к границе ходовой направляющей балки на расстояние, соответствующее длине тормозного пути платформы, формируют сигнал остановки мобильной платформы, в соответствии с которым скорость вращения главного вала электронно-управляемого электропривода уменьшают с обеспечением исключения схода мобильной платформы с упомянутой балки.
| МАГНИТНАЯ ВОЗБУЖДАЮЩАЯ ГОЛОВКА | 1967 |
|
SU216043A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РАСЦЕПЛЕНИЯ АВТОСЦЕПОК ДВИЖУЩИХСЯ ВАГОНОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2728968C1 |
| УСТРОЙСТВО ДЛЯ РАСЦЕПЛЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2020 |
|
RU2732676C1 |
| СИСТЕМА АВТОРАСЦЕПКИ ВАГОНОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2010 |
|
RU2450946C1 |
| DE 4015878 A, 21.11.1991 | |||
| EP 3095666 A1, 23.11.2016. | |||

