Изобретение относится к беспилотным летательным аппаратам, а именно к комбинированным транспортным беспилотным летательным аппаратам, и может быть использовано для транспортировки грузов в условиях, когда применение наземных транспортных средств невозможно, опасно или сопряжено с высоким риском.
Известен комбинированный транспортный беспилотный летательный аппарат, включающий кольцевую раму, внутри которой расположен блок управления, соединенный с кольцевой рамой горизонтальными спицами. На верхней поверхности кольцевой рамы выполнены вертикальные установочные пазы попарно, каждый из которых дополнительно оснащен горизонтальным пазом, а на нижней поверхности кольцевой рамы закреплены грузозахватные стропы, оснащенные на свободных концах грузозахватными крюками. В каждую пару вертикальных установочных пазов вставлены вертикальные Г-образные тяги, где свободные концы их длинных сторон закреплены за беспилотные летательные аппараты, а свободные концы их коротких сторон заходят в горизонтальные пазы. Вертикальные установочные пазы, расположенные в паре, в нижней части объединены отверстием. Каждое отверстие оснащено подвижной пластиной, которая с нижней стороны по бокам соединена с пружинами, а по центру – со штоком, проходящим через нижнюю поверхность кольцевой рамы. Подвижная пластина с верхней стороны оснащена двумя ограничителями, входящими в вертикальные установочные пазы, которые фиксируют вставленные в них вертикальные Г-образные тяги. На внешней боковой поверхности кольцевой рамы выполнены горизонтальные резьбовые отверстия, центры которых совпадают с пазами, выполненными в торцах подвижных пластин. Подвижные пластины фиксируются болтами, каждый из которых проходит через горизонтальное резьбовое отверстие и заходит в паз, выполненный в торце подвижной платины (см. патент CN № 215155691 U, М. Кл. B 64 D 9/00, B 64 C 1/06, 27/08, 14.12.2021).
Недостатком данного комбинированного транспортного беспилотного летательного аппарата является сложность конструкции.
Задача, на решение которой направлено изобретение – упрощение конструкции комбинированного транспортного беспилотного летательного аппарата.
Для решения этой задачи в комбинированном транспортном беспилотном летательном аппарате, включающем кольцевую раму, внутри которой расположен блок управления, соединенный с кольцевой рамой горизонтальными спицами, на нижней поверхности кольцевой рамы закреплены грузозахватные стропы, оснащенные на свободных концах грузозахватными крюками; беспилотные летательные аппараты, расположенные над верхней поверхностью кольцевой рамы и оснащенные парами вертикальных Г-образных тяг, закрепленных к беспилотным летательным аппаратам длинными сторонами, согласно изобретению, вертикальные Г-образные тяги каждого беспилотного летательного аппарата направлены короткими сторонами друг к другу и прижаты длинными сторонами к внешней боковой и внутренней боковой поверхностям кольцевой рамы гайками, накрученными на резьбовые концы шпильки, проходящей через горизонтальное радиальное отверстие кольцевой рамы и отверстия, выполненные на длинных сторонах вертикальных Г-образных тяг, таким образом, что короткие стороны вертикальных Г-образных тяг прижаты к нижней поверхности кольцевой рамы, при этом на шпильке между гайками и длинными сторонами вертикальных Г-образных тяг установлены пружинные шайбы.
Установка вертикальных Г-образных тяг каждого беспилотного летательного аппарата короткими сторонами друг к другу, прижатие вертикальных Г-образных тяг длинными сторонами к внешней боковой и внутренней боковой поверхностям кольцевой рамы гайками, накрученными на резьбовые концы шпильки, проходящей через горизонтальное радиальное отверстие кольцевой рамы и отверстия, выполненные на длинных сторонах вертикальных Г-образных тяг, таким образом, что короткие стороны вертикальных Г-образных тяг прижаты к нижней поверхности кольцевой рамы, а также установка на шпильке между гайками и длинными сторонами вертикальных Г-образных тяг пружинных шайб позволяют обеспечить крепление кольцевой рамы к беспилотными летательным аппаратам, при котором кольцевая рама удерживается короткими сторонами вертикальных Г-образных тяг и шпильками, не позволяющими противоположным вертикальным Г-образным тягам расходиться. При этом из конструкции комбинированного транспортного беспилотного летательного аппарата исключены: вертикальные установочные пазы, каждый из которых дополнительно оснащен горизонтальным пазом; отверстия, объединяющие вертикальные установочные пазы в нижней части попарно; подвижные пластины, которые с нижней стороны по бокам соединены с пружинами, а по центру – со штоком, проходящим через нижнюю поверхность кольцевой рамы, а также оснащены ограничителями, входящими в вертикальные установочные пазы, которые фиксируют вставленные в них вертикальные Г-образные тяги; горизонтальные резьбовые отверстия, центры которых совпадают с пазами, выполненными в торцах подвижных пластин; болты, каждый из которых проходит через горизонтальное резьбовое отверстие и заходит в паз, выполненный в торце подвижной платины. Таким образом, конструкция комбинированного транспортного беспилотного летательного аппарата упрощается.
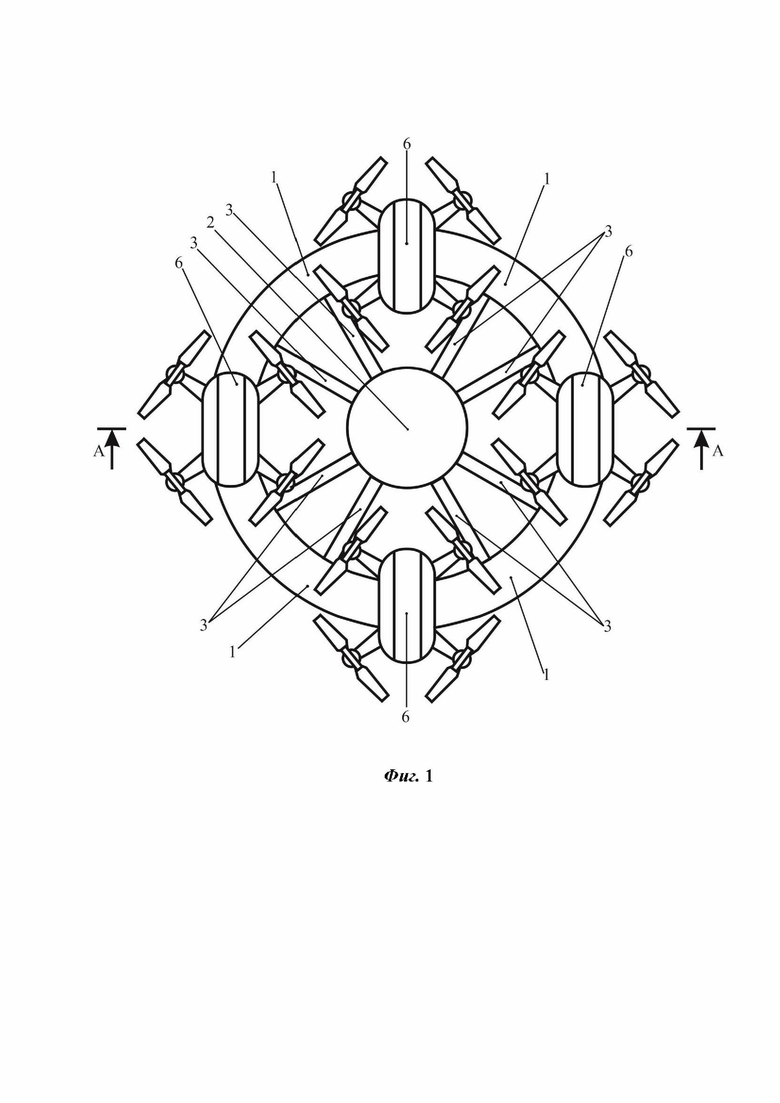
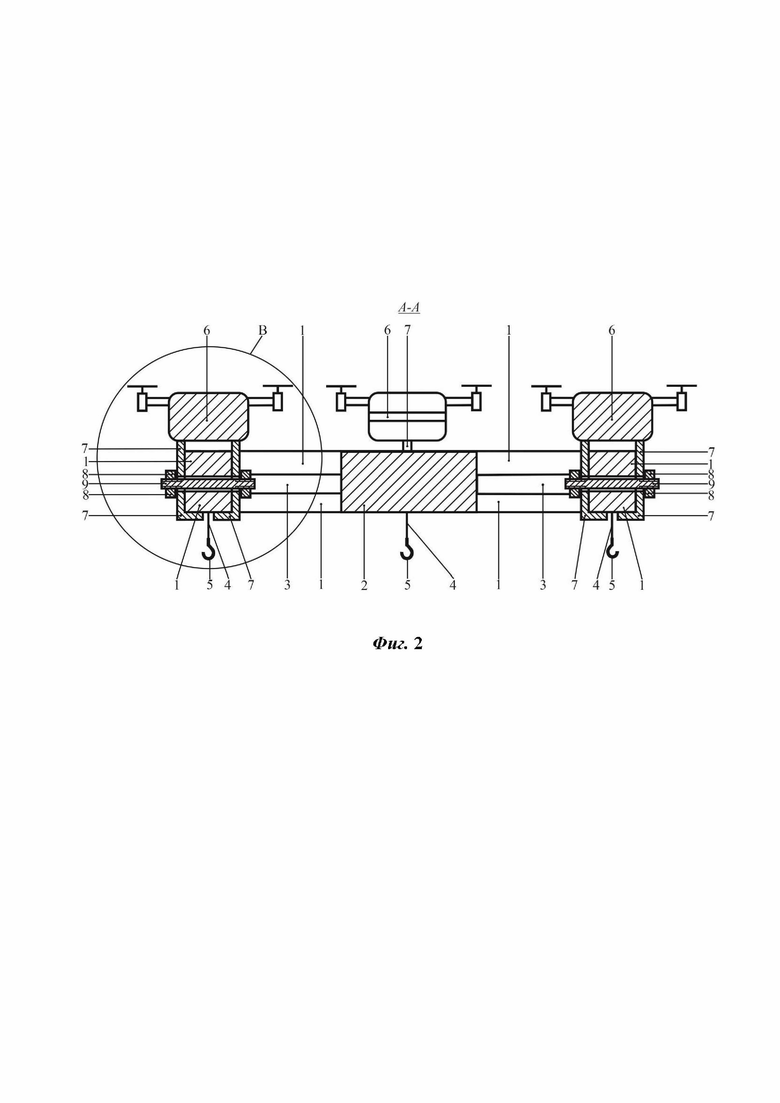
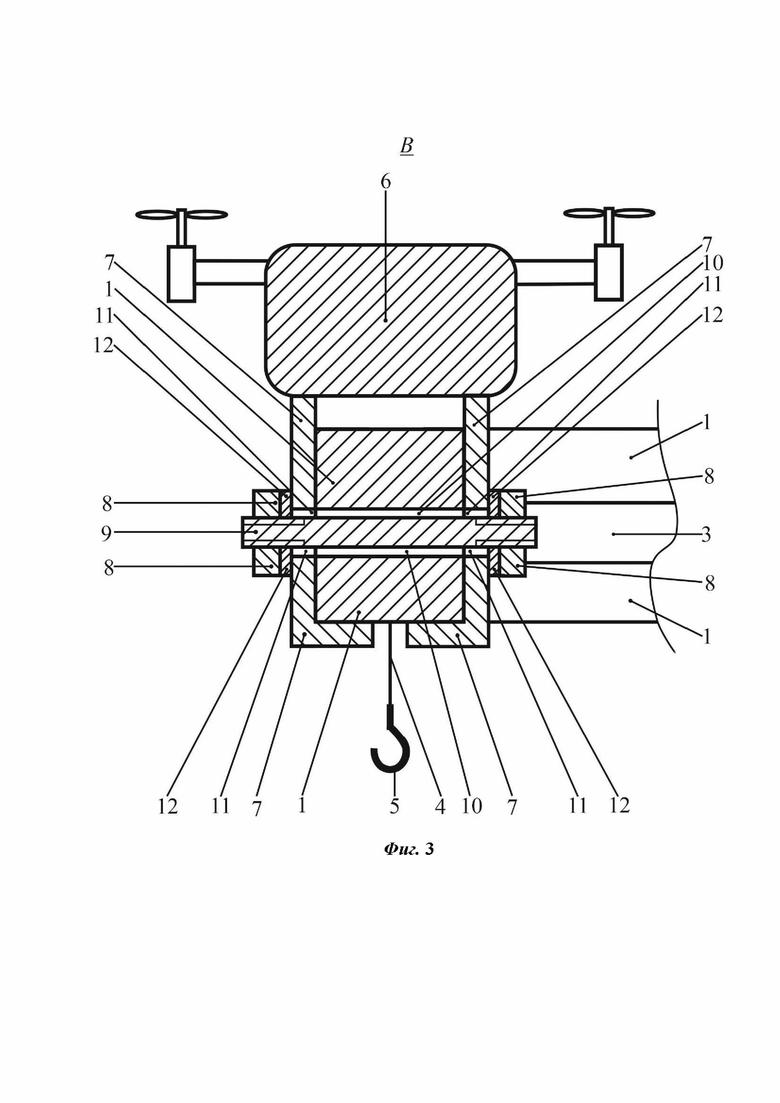
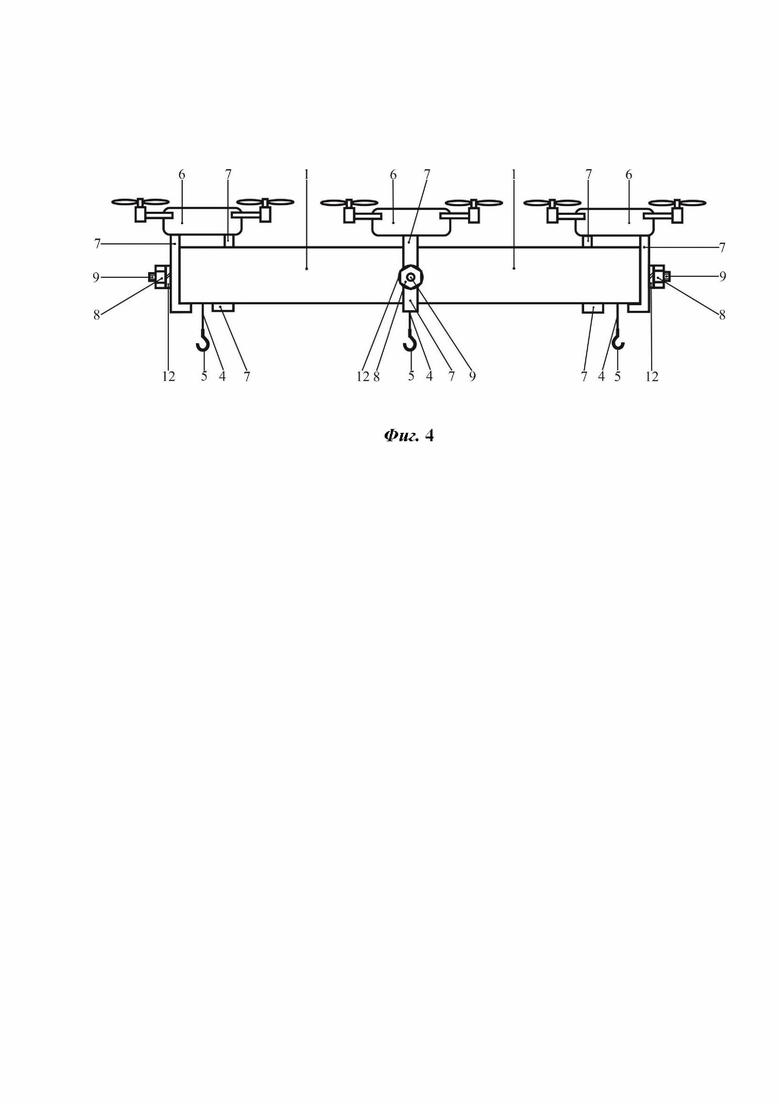
На фиг. 1 показан комбинированный транспортный беспилотный летательный аппарат, вид сверху; на фиг. 2 – разрез А–А на фиг. 1; на фиг. 3 – узел B на фиг. 2, на фиг. 4 – вид с внешней боковой поверхности кольцевой рамы.
Комбинированный транспортный беспилотный летательный аппарат включает кольцевую раму 1, внутри которой расположен блок управления 2, соединенный с кольцевой рамой 1 горизонтальными спицами 3, на нижней поверхности кольцевой рамы 1 закреплены грузозахватные стропы 4, оснащенные на свободных концах грузозахватными крюками 5; беспилотные летательные аппараты 6, расположенные над верхней поверхностью кольцевой рамы 1 и оснащенные парами вертикальных Г-образных тяг 7, закрепленных к беспилотным летательным аппаратам 6 длинными сторонами. Вертикальные Г-образные тяги 7 каждого беспилотного летательного аппарата 6 направлены короткими сторонами друг к другу и прижаты длинными сторонами к внешней боковой и внутренней боковой поверхностям кольцевой рамы 1 гайками 8, накрученными на резьбовые концы шпильки 9, проходящей через горизонтальное радиальное отверстие 10 кольцевой рамы 1 и отверстия 11, выполненные на длинных сторонах вертикальных Г-образных тяг 7, таким образом, что короткие стороны вертикальных Г-образных тяг 7 прижаты к нижней поверхности кольцевой рамы 1. На шпильке 9 между гайками 8 и длинными сторонами вертикальных Г-образных тяг 7 установлены пружинные шайбы 12.
Комбинированный транспортный беспилотный летательный аппарат работает следующим образом. Предварительно производится его сборка. На кольцевую раму 1, на нижней поверхности которой закреплены грузозахватные стропы 4, оснащенные на свободных концах грузозахватными крюками 5, устанавливается блок управления 2 и соединяется с кольцевой рамой горизонтальными спицами 3. Сверху на кольцевую раму 1 над горизонтальными радиальными отверстиями 10 устанавливаются беспилотные летательные аппараты 6 (2, 4 или 6 шт.) в зависимости от требуемой грузоподъемности комбинированного транспортного беспилотного летательного аппарата. При этом беспилотные летательные аппараты 6 оборудованы парами вертикальных Г-образных тяг 7, закрепленных к беспилотным летательным аппаратам 6 длинными сторонами. Отверстия 11, выполненные на длинных сторонах вертикальных Г-образных тяг 7, совмещаются с горизонтальными радиальными отверстиями 10 кольцевой рамы 1, и в них вставляются шпильки 9, таким образом, чтобы резьбовые концы шпилек 9 выходили за отверстия 11, выполненные на длинных сторонах вертикальных Г-образных тяг 7. На резьбовые концы шпилек 9 к длинным сторонам вертикальных Г-образных тяг 7 устанавливают пружинные шайбы 12 и закручивают гайки 8. Пружинные шайбы 12 препятствуют самораскручиванию гаек 8 под действием внешних нагрузок. После закрепления всех беспилотных летательных аппаратов 6 к кольцевой раме 1 оператор подает сигнал на взлет. Блок управления 2 выдает управляющие сигналы соответствующим исполнительным устройствам (на фиг. не показаны). Комбинированный транспортный беспилотный летательный аппарат взлетает и направляется сигналом к месту хранения транспортируемого груза (на фиг. не показан). При достижении места хранения груза (на фиг. не показан) оператор подает сигнал на снижение. Блок управления 2 выдает управляющие сигналы соответствующим исполнительным устройствам (на фиг. не показаны). Комбинированный транспортный беспилотный летательный аппарат опускается на высоту, обеспечивающую зацепление груза (на фиг. не показан) грузозахватными крюками 6. Производится зацепление груза (на фиг. не показан) грузозахватными крюками 6. Оператор подает сигнал на взлет. Блок управления 2 выдает управляющие сигналы соответствующим исполнительным устройствам (на фиг. не показаны). Комбинированный транспортный беспилотный летательный аппарат взлетает на требуемую высоту и направляется сигналом к месту доставки груза (на фиг. не показан). По прибытии к месту доставки груза (на фиг. не показан) оператор подает сигнал на снижение. Блок управления 2 выдает управляющие сигналы соответствующим исполнительным устройствам (на фиг. не показаны). Комбинированный транспортный беспилотный летательный аппарат снижается на высоту, обеспечивающую снятие груза (на фиг. не показан) с грузозахватных крюков 6. Производится снятие груза (на фиг. не показан) с грузозахватных крюков 6. Оператор подает сигнал на взлет. Блок управления 2 выдает управляющие сигналы соответствующим исполнительным устройствам (на фиг. не показаны). Комбинированный транспортный беспилотный летательный аппарат взлетает на требуемую высоту и направляется сигналом к месту назначения.
При необходимости комбинированный транспортный беспилотный летательный аппарат может быть разобран для его транспортировки на другой объект или на предприятие, осуществляющее техническое обслуживание и ремонт.
Использование предложенного комбинированного транспортного беспилотного летательного аппарата позволит доставлять грузы в условиях, когда применение наземных транспортных средств невозможно, опасно, или сопряжено с высоким риском.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ПОГРУЗОЧНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1999 |
|
RU2150813C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 2000 |
|
RU2178961C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| СИЛОВОЙ ТРЕНАЖЕР И НАГРУЗОЧНЫЙ УЗЕЛ (ВАРИАНТЫ) | 2003 |
|
RU2344861C2 |
| СИСТЕМА ДЛЯ РАЗМЕЩЕНИЯ И ДЕСАНТИРОВАНИЯ ГРУЗОВ С ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2426675C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Механизм управления штангой беспилотного летательного аппарата | 2024 |
|
RU2836956C1 |
| КОНТЕЙНЕР ДЛЯ ФИКСАЦИИ ГРУЗОВ КОНТЕЙНЕРНОГО ТИПА ДЛЯ ЛЕГКИХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2811209C1 |
Изобретение относится к беспилотным летательным аппаратам. Комбинированный транспортный беспилотный летательный аппарат включает кольцевую раму (1) и беспилотные летательные аппараты (6), расположенные над верхней поверхностью кольцевой рамы и оснащенные парами вертикальных Г-образных тяг (7), закрепленных к беспилотным летательным аппаратам (6) длинными сторонами. Вертикальные Г-образные тяги (7) каждого беспилотного летательного аппарата (6) прижаты длинными сторонами к внешней боковой и внутренней боковой поверхностям кольцевой рамы гайками (8), накрученными на шпильку (9), проходящую через горизонтальное радиальное отверстие (10) кольцевой рамы (1) и отверстия (11), выполненные на длинных сторонах вертикальных Г-образных тяг (7). Достигается упрощение конструкции. 4 ил.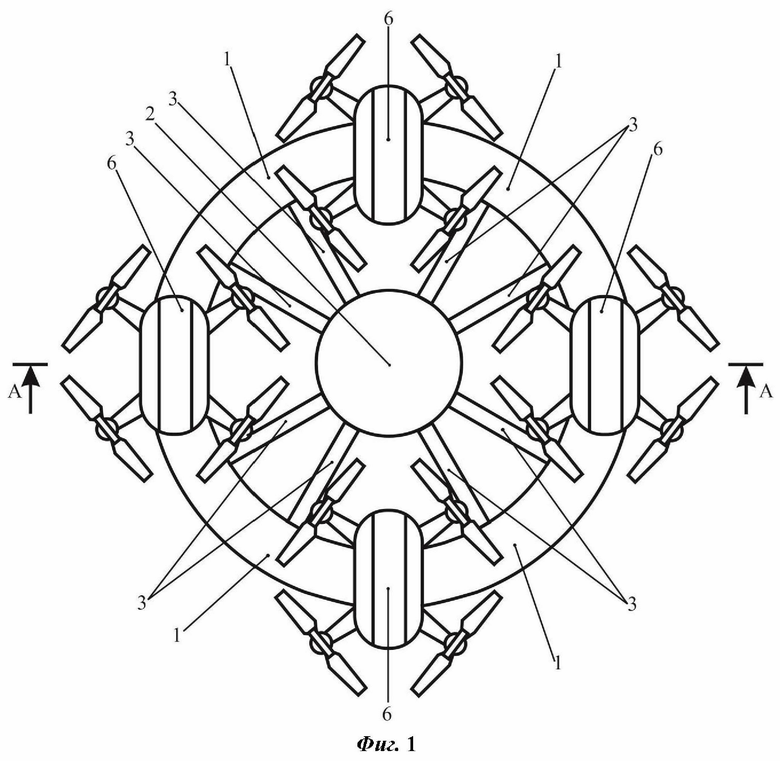
Комбинированный транспортный беспилотный летательный аппарат, включающий кольцевую раму, внутри которой расположен блок управления, соединенный с кольцевой рамой горизонтальными спицами, на нижней поверхности кольцевой рамы закреплены грузозахватные стропы, оснащенные на свободных концах грузозахватными крюками; беспилотные летательные аппараты, расположенные над верхней поверхностью кольцевой рамы и оснащенные парами вертикальных Г-образных тяг, закрепленных к беспилотным летательным аппаратам длинными сторонами, отличающийся тем, что вертикальные Г-образные тяги каждого беспилотного летательного аппарата направлены короткими сторонами друг к другу и прижаты длинными сторонами к внешней боковой и внутренней боковой поверхностям кольцевой рамы гайками, накрученными на резьбовые концы шпильки, проходящей через горизонтальное радиальное отверстие кольцевой рамы и отверстия, выполненные на длинных сторонах вертикальных Г-образных тяг, таким образом, что короткие стороны вертикальных Г-образных тяг прижаты к нижней поверхности кольцевой рамы, при этом на шпильке между гайками и длинными сторонами вертикальных Г-образных тяг установлены пружинные шайбы.
| CN 215155691 U, 14.12.2021 | |||
| US 11643207 B1, 09.05.2023 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО, ТРАНСПОРТНАЯ СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2789564C1 |
| Модульный летательный аппарат и способ его вертикального взлёта | 2021 |
|
RU2777132C1 |

