Изобретение относится к беспилотным летательным аппаратам, а именно к механизмам управления штангой, и может быть использовано для установки штанги на заданный угол относительно продольной оси беспилотного летательного аппарата.
Известен механизм управления штангой беспилотного летательного аппарата, включающий корпус, где с передней стороны в торцевой части установлена нижняя П-образная горизонтальная плита, а с задней стороны по бокам закреплены конические шестерни. Нижняя П-образная горизонтальная плита со стороны свободной торцевой части оснащена нижним круглым посадочным отверстием, а сверху - резьбовыми отверстиями для крепления верхней горизонтальной плиты с помощью болтов. По центру нижнего круглого посадочного отверстия сделан нижний кольцевой паз со стопорной канавкой. В нижнем кольцевом пазу размещена реверсивная пружина, зафиксированная в стопорной канавке, а на одинаковом удалении от его центра выполнена первая группа шпоночных пазов, в которые вставлены шпонки с пружинами. Вертикальный опорный вал вставлен в реверсивную пружину и жестко закреплен по центру кольцевого паза. На вертикальном опорном валу установлен шарнир, снабженный стопорной канавкой в посадочном отверстии для фиксации реверсивной пружины, на шарнире жестко закреплена штанга. В нижней части шарнира на одинаковом удалении от центра его посадочного отверстия выполнена вторая группа шпоночных пазов, которая имеет совмещение с первой группой шпоночных пазов. В зацепление с коническими шестернями входят ведомые шестерни, которые приводятся во вращение ведущей шестерней, установленной на валу электропривода (см. патент CN № 112078766 А, М. Кл. B63C 11/52, B63H 1/36, 15.12.2020).
Недостатками данного механизма управления штангой беспилотного летательного аппарата являются ограниченные функциональные возможности, так как требуется ручное складывание штанги и отсутствует возможность изменения угла установки штанги относительно продольной оси беспилотного летательного аппарата в процессе его полета.
Задача, на решение которой направлено изобретение - расширение функциональных возможностей механизма управления штангой беспилотного летательного аппарата.
Для решения этой задачи в механизме управления штангой беспилотного летательного аппарата, включающем корпус, где с передней стороны в торцевой части установлена нижняя П-образная горизонтальная плита и конические шестерни, нижняя П-образная горизонтальная плита со стороны свободной торцевой части имеет нижнее круглое посадочное отверстие, а сверху - резьбовые отверстия для крепления верхней горизонтальной плиты с помощью болтов, по центру нижнего круглого посадочного отверстия сделан нижний кольцевой паз; вертикальный опорный вал с установленным на нем шарниром, на котором жестко закреплена штанга; и электропривод, согласно изобретению, с задней стороны корпуса в торцевой части установлена крепежная пластина с отверстиями, а с верхней стороны вмонтирован ревизионный люк, при этом нижняя П-образная горизонтальная плита и корпус имеют общее сквозное отверстие, а верхняя горизонтальная плита имеет верхнее круглое посадочное отверстие, центр которого совпадает с центром нижнего круглого посадочного отверстия, где по центру верхнего круглого посадочного отверстия сделан верхний кольцевой паз, в нижнем кольцевом пазе размещен нижний упорный подшипник, а в верхнем кольцевом пазе размещен верхний упорный подшипник, которые установлены на вертикальном опорном валу с направляющей шпонкой, причем нижний упорный подшипник в нижнем кольцевом пазу зафиксирован нижней крышкой, закрепленной болтами за нижнее круглое посадочное отверстие, а верхний упорный подшипник в верхнем кольцевом пазу зафиксирован верхней крышкой, закрепленной болтами за верхнее круглое посадочное отверстие; на вертикальном опорном валу от нижней крышки установлена ведомая коническая шестерня, таким образом, что направляющая шпонка заходит в сквозной шпоночный паз, выполненный в посадочном отверстии конической шестерни, а сверху конической шестерни на вертикальном опорном валу установлен шарнир, причем направляющая шпонка заходит в сквозной шпоночный паз, выполненный в посадочном отверстии шарнира; внутри корпуса на опорах расположен электропривод, вал которого проходит через сквозное отверстие, а на свободном конце вала закреплена ведущая коническая шестерня, входящая в зацепление с ведомой конической шестерней.
Установка с задней стороны корпуса в торцевой части крепежной пластины с отверстиями, вмонтирование с верхней стороны корпуса ревизионного люка, оснащение нижней П-образной горизонтальной плиты и корпуса общим сквозным отверстием, оснащение верхней горизонтальной плиты верхним круглым посадочным отверстием, центр которого совпадает с центром нижнего круглого посадочного отверстия, где по центру верхнего круглого посадочного отверстия сделан верхний кольцевой паз, размещение в нижнем кольцевом пазу нижнего упорного подшипника, а в верхнем кольцевом пазу размещение верхнего упорного подшипника, которые установлены на вертикальном опорном валу, снабженном направляющей шпонкой, причем нижний упорный подшипник в нижнем кольцевом пазу зафиксирован нижней крышкой, закрепленной болтами за нижнее круглое посадочное отверстие, а верхний упорный подшипник в верхнем кольцевом пазу зафиксирован верхней крышкой, закрепленной болтами за верхнее круглое посадочное отверстие, установка на вертикальный опорный вал от нижней крышки ведомой конической шестерни, таким образом, что направляющая шпонка заходит в сквозной шпоночный паз, выполненный в посадочном отверстии конической шестерни, а сверху конической шестерни на вертикальном опорном валу установка шарнира, где направляющая шпонка заходит в сквозной шпоночный паз, выполненный в посадочном отверстии шарнира, а также расположение внутри корпуса на опорах электропривода, вал которого проходит через сквозное отверстие, где на свободном конце вала закреплена ведущая коническая шестерня, входящая в зацепление с ведомой конической шестерней, позволяет посредством электропривода через ведущую и ведомую конические шестерни передавать крутящий момент на вертикальный опорный вал, тем самым обеспечивая вращение вертикального опорного вала, установленного в нижнем и верхнем упорных подшипниках, вокруг своей оси. При вращении вертикального опорного вала вокруг своей оси поворачивается установленный на нем шарнир, на котором жестко закреплена штанга, по часовой или против часовой стрелки, в результате этого осуществляется установка штанги параллельно продольной оси беспилотного летательного аппарата, а следовательно, механизм управления выполняет складывание штанги, а его функциональные возможности расширяются.
Расположение внутри корпуса на опорах электропривода, вал которого проходит через сквозное отверстие, где на свободном конце вала закреплена ведущая коническая шестерня, входящая в зацепление с ведомой конической шестерней, дает возможность вращать вокруг своей оси вертикальный опорной вал с установленным на нем шарниром, на котором жестко закреплена штанга, то есть изменять угол установки штанги относительно продольной оси беспилотного летательного аппарата в процессе его полета, что также расширяет функциональные возможности механизма управления штангой беспилотного летательного аппарата.
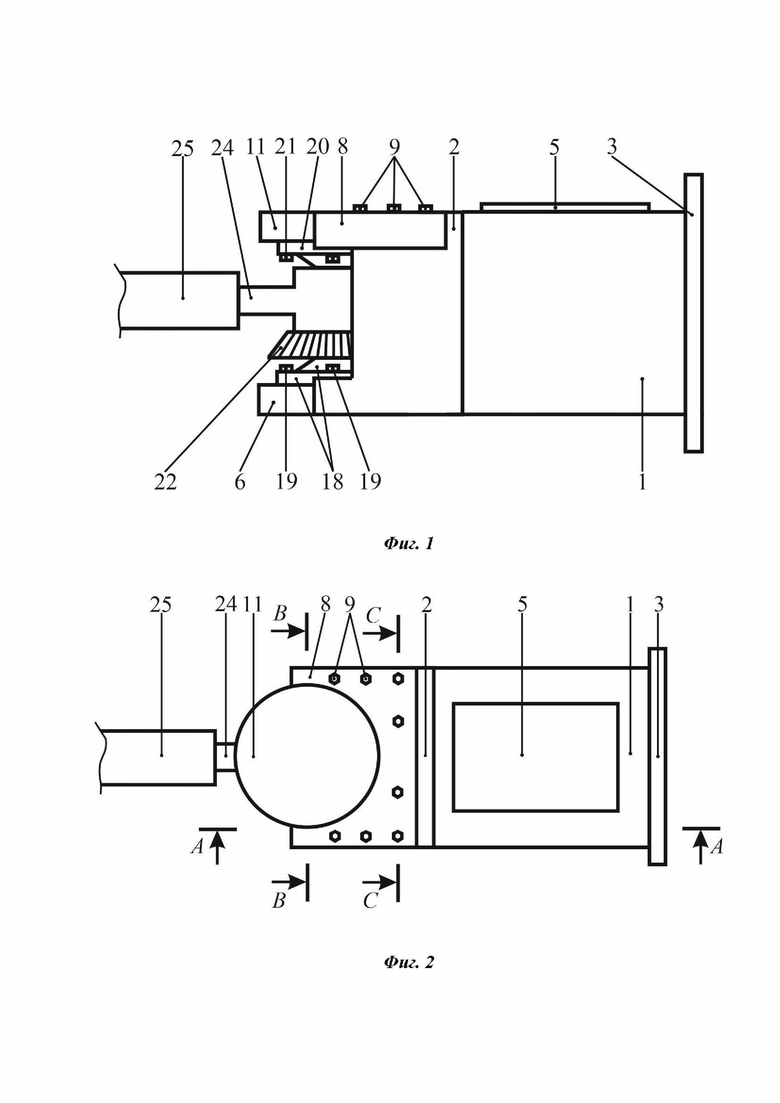
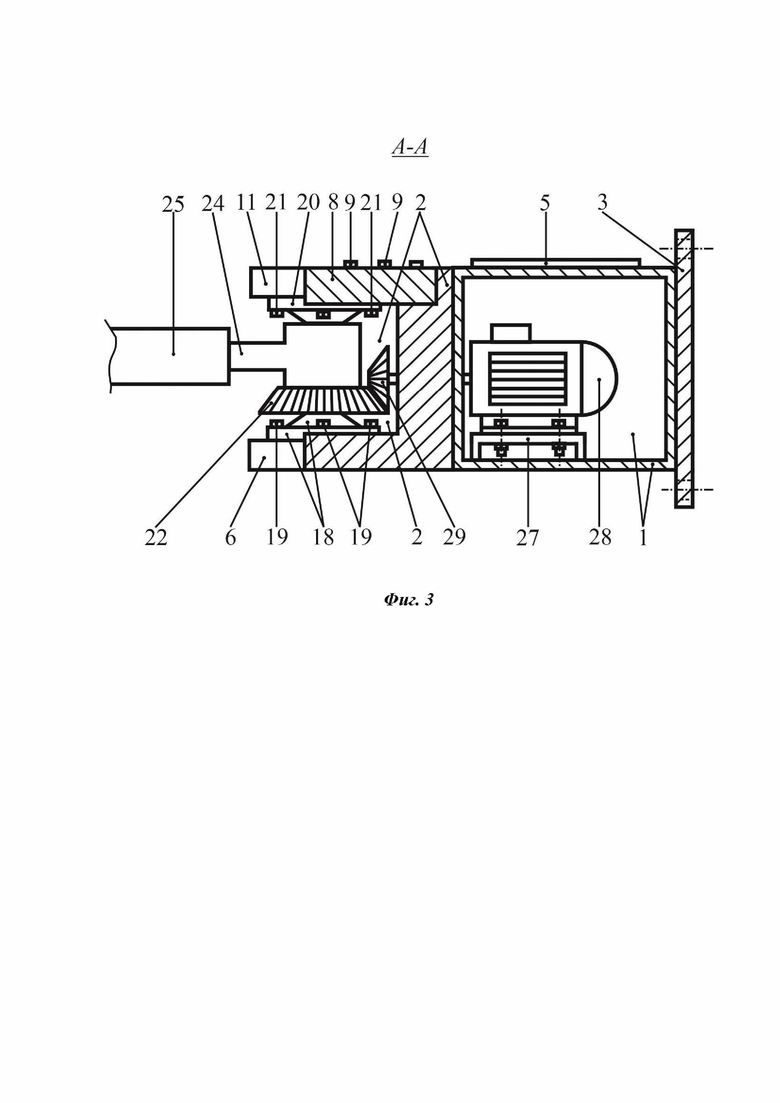
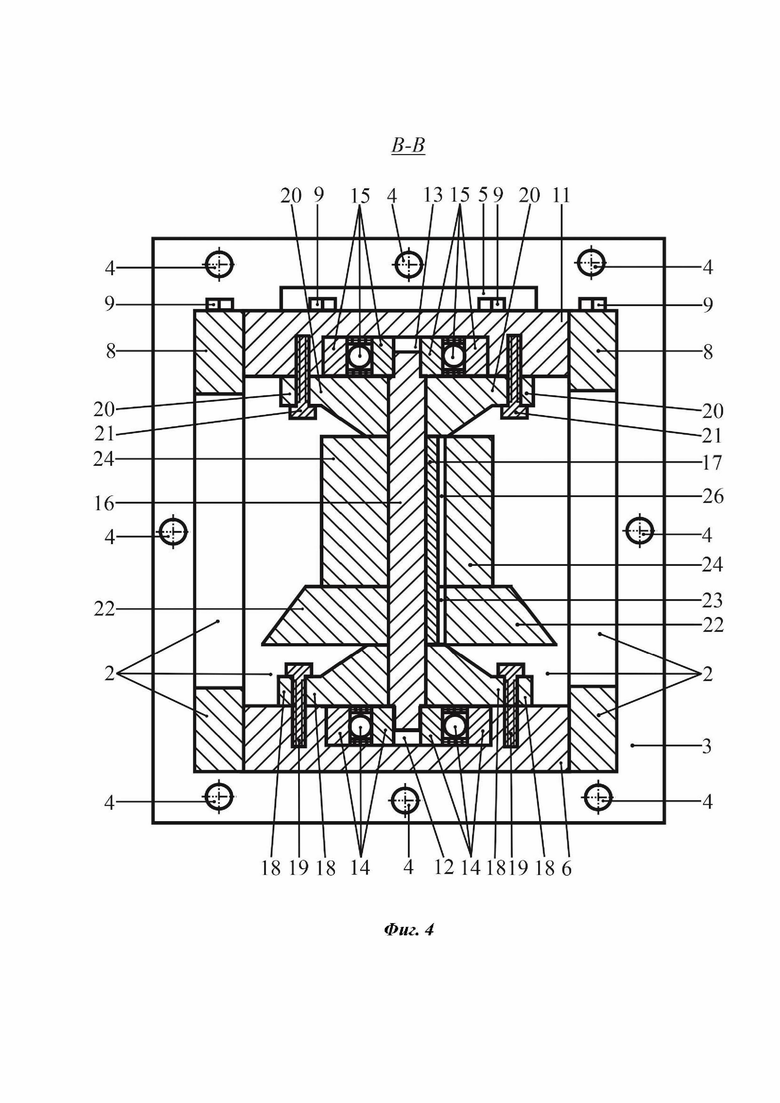
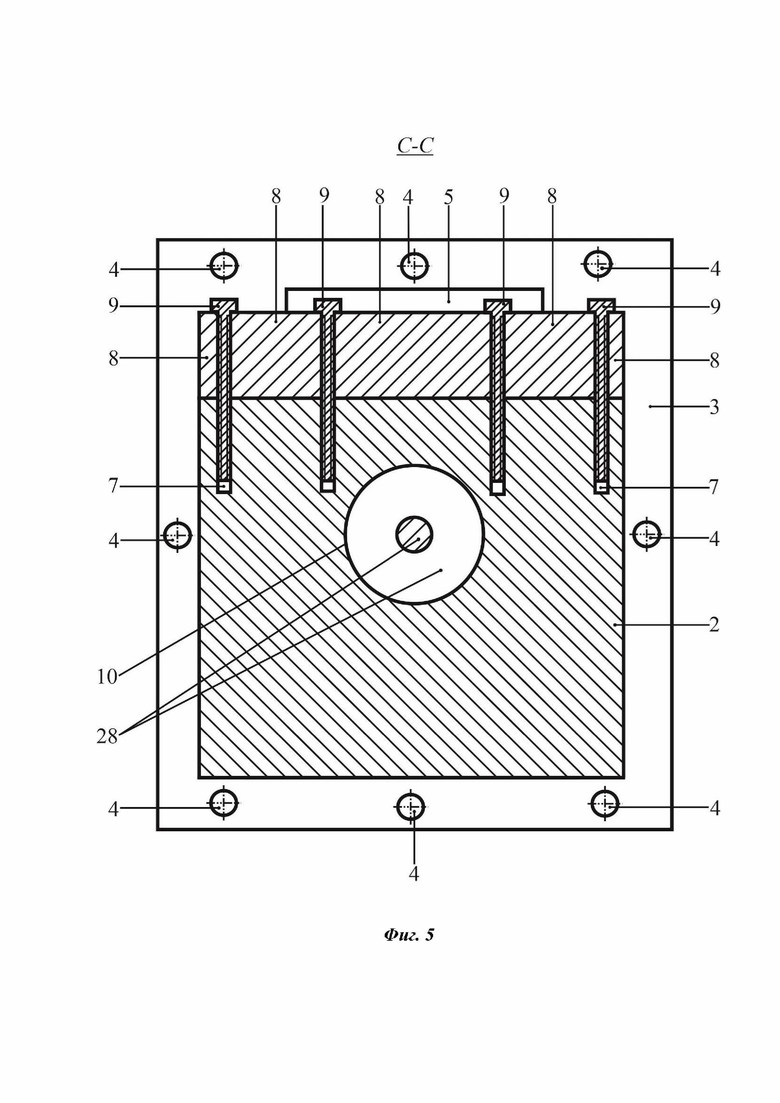
На фиг. 1 показан механизм управления штангой беспилотного летательного аппарата, вид сбоку; на фиг. 2 - то же, вид с верху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - разрез С-С на фиг. 2.
Механизм управления штангой беспилотного летательного аппарата включает корпус 1, где с передней стороны в торцевой части установлена нижняя П-образная горизонтальная плита 2, с задней стороны в торцевой части установлена крепежная пластина 3 с отверстиями 4, а с верхней стороны вмонтирован ревизионный люк 5. Нижняя П-образная горизонтальная плита 2 со стороны свободной торцевой части имеет нижнее круглое посадочное отверстие 6, а сверху - резьбовые отверстия 7 для крепления верхней горизонтальной плиты 8 с помощью болтов 9. При этом нижняя П-образная горизонтальная плита 2 и корпус 1 имеют общее сквозное отверстие 10, а верхняя горизонтальная плита 8 имеет верхнее круглое посадочное отверстие 11, центр которого совпадает с центром нижнего круглого посадочного отверстия 6. По центру нижнего круглого посадочного отверстия 6 и верхнего круглого посадочного отверстия 11 сделаны соответственно нижний кольцевой паз 12 и верхний кольцевой паз 13. В нижнем кольцевом пазу 12 размещен нижний упорный подшипник 14, а в верхнем кольцевом пазу 13 размещен верхний упорный подшипник 15, которые установлены на вертикальном опорном валу 16, снабженном направляющей шпонкой 17. Нижний упорный подшипник 14 в нижнем кольцевом пазу 12 зафиксирован нижней крышкой 18, закрепленной болтами 19 за нижнее круглое посадочное отверстие 6. Верхний упорный подшипник 15 в верхнем кольцевом пазу 13 зафиксирован верхней крышкой 20, закрепленной болтами 21 за верхнее круглое посадочное отверстие 11. На вертикальном опорном валу 16 от нижней крышки 18 установлена ведомая коническая шестерня 22, таким образом, что направляющая шпонка 17 заходит в сквозной шпоночный паз 23, выполненный в посадочном отверстии ведомой конической шестерни 22. Сверху ведомой конической шестерни 22 на вертикальном опорном валу 16 установлен шарнир 24, на котором жестко закреплена штанга 25, где направляющая шпонка 17 заходит в сквозной шпоночный паз 26, выполненный в посадочном отверстии шарнира 24. Внутри корпуса 1 на опорах 27 расположен электропривод 28, вал которого проходит через сквозное отверстие 10, на свободном конце вала закреплена ведущая коническая шестерня 29, входящая в зацепление с ведомой конической шестерней 22.
Механизм управления штангой беспилотного летательного аппарата работает следующим образом. Беспилотный летательный аппарат, находящийся в функциональном состоянии ожидания полета, транспортировки, планового обслуживания или хранения требует, чтобы штанги 25 были в сложенном состоянии. При начале полета оператором подается соответствующий сигнал на контроллер (на фиг. не показан), который включает электропривод 28 в результате чего вал электропривода 28 с закрепленной на нем ведущей конической шестерней 29 начинает вращаться в заданном направлении. При вращении ведущей конической шестерни 29, которая входит в зацепление с ведомой конической шестерней 22, осуществляется вращение вертикального опорного вала 16 вокруг своей оси и шарнира 24, на котором жестко закреплена штанга 25. В процессе вращения шарнира 24 штанга 25 выходит из сложенного состояния и устанавливается на заданный угол относительно продольной оси беспилотного летательного аппарата. В заданном положении штанги 25 беспилотный летательный аппарат выполняет взлет на требуемую высоту.
При выполнении полета беспилотным летательным аппаратом, если возникает потребность изменения угла установки штанги 25 относительно продольной оси данного беспилотного летательного аппарата, то оператор подает соответствующий сигнал на контроллер (на фиг. не показан), который включает электропривод 28. Электропривод 28 через ведущую коническую шестерню 29 и ведомую коническую шестерню 22 передает крутящий момент на вертикальный опорный вал 16. Вращение вертикального опорного вала 16 на заданный угол поворота реализуется совместно с шарниром 24, на котором жестко закреплена штанга 25. В результате этого изменяется угол установки штанги 25 относительно продольной оси беспилотного летательного аппарата.
После завершения полета у беспилотного летательного аппарата штанги 25 складываются. Оператором подается соответствующий сигнал на контроллер (на фиг. не показан), который включает электропривод 28. В результате этого вал электропривода 28 с закрепленной на нем ведущей конической шестерней 29 начинает вращаться в противоположном направлении раскладывания штанги 25. В процессе вращения ведущей конической шестерни 29, которая входит в зацепление с ведомой конической шестерней 22, осуществляется вращение вокруг своей оси вертикального опорного вала 16 и шарнира 24, на котором жестко закреплена штанга 25. Шарнир 24 поворачивает штангу 25, и она устанавливается параллельно продольной оси беспилотного летательного аппарата, и таким образом находится в сложенном состоянии.
Ревизионный люк 5 обеспечивает доступ обслуживающего персонала к электроприводу 28 для его осмотров, технического обслуживания и ремонта.
Использование предложенного механизма управления штангой беспилотного летательного аппарата позволит эффективно эксплуатировать беспилотные летательные аппараты.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОФИЛЕГИБОЧНЫЙ СТАН | 2004 |
|
RU2276627C1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| Беспилотный летательный аппарат для отбора почвенных образцов | 2024 |
|
RU2828894C1 |
| Устройство для образования соляной пыли | 2023 |
|
RU2830463C1 |
| ПОДВЕСНОЙ МАНИПУЛЯТОР ДЛЯ КАНТОВКИ, ПРОТЯЖКИ, СБОРКИ, ЗАЛИВКИ ЛИТЕЙНЫХ ФОРМ И ВЫДАВЛИВАНИЯ ФОРМОВОЧНОЙ СМЕСИ И ОТЛИВКИ ИЗ ОПОКИ | 2004 |
|
RU2346789C2 |
| ВЕЛОСИПЕД ДВУХКОЛЕСНЫЙ | 2018 |
|
RU2696749C1 |
| Автоматический многопильный станок для распиловки сахарных голов | 1933 |
|
SU40284A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ЧЕРЁМУШКИНА О.В. | 2008 |
|
RU2396185C1 |
| Устройство для намотки полосового материала | 1980 |
|
SU990366A1 |
| ДВУХКЛЕТЕВОЙ БЛОК ТРЕХРОЛИКОВЫХ КЛЕТЕЙ | 1999 |
|
RU2177385C2 |
Изобретение относится к беспилотным летательным аппаратам. Механизм управления штангой беспилотного летательного аппарата включает корпус (1), с задней стороны которого в торцевой части установлена крепежная пластина (3) с отверстиями, а с верхней стороны вмонтирован ревизионный люк (5). Нижняя П-образная горизонтальная плита (2) со стороны свободной торцевой части имеет нижнее круглое посадочное отверстие (6). По центру отверстий (6, 11) сделаны кольцевые пазы. В пазах размещены подшипники, которые установлены на валу, снабженном шпонкой. На валу от нижней крышки (18) установлена ведомая коническая шестерня (22). Сверху ведомой конической шестерни (22) на валу (16) установлен шарнир (24), на котором жестко закреплена штанга (25), где направляющая шпонка заходит в сквозной шпоночный паз, выполненный в посадочном отверстии шарнира (24). Внутри корпуса (1) расположен электропривод (28). Достигается улучшение эксплуатационных возможностей беспилотных летательных аппаратов. 5 ил.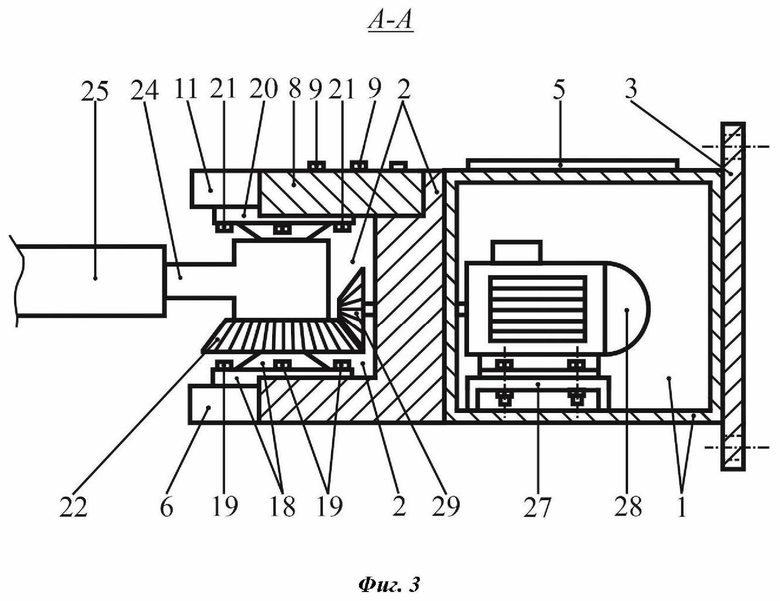
Механизм управления штангой беспилотного летательного аппарата, включающий корпус, где с передней стороны в торцевой части установлена нижняя П-образная горизонтальная плита и конические шестерни, нижняя П-образная горизонтальная плита со стороны свободной торцевой части имеет нижнее круглое посадочное отверстие, а сверху – резьбовые отверстия для крепления верхней горизонтальной плиты с помощью болтов, по центру нижнего круглого посадочного отверстия сделан нижний кольцевой паз; вертикальный опорный вал с установленным на нем шарниром, на котором жестко закреплена штанга; и электропривод, отличающийся тем, что с задней стороны корпуса в торцевой части установлена крепежная пластина с отверстиями, а с верхней стороны вмонтирован ревизионный люк, при этом нижняя П-образная горизонтальная плита и корпус имеют общее сквозное отверстие, а верхняя горизонтальная плита имеет верхнее круглое посадочное отверстие, центр которого совпадает с центром нижнего круглого посадочного отверстия, где по центру верхнего круглого посадочного отверстия сделан верхний кольцевой паз, в нижнем кольцевом пазу размещен нижний упорный подшипник, а в верхнем кольцевом пазу размещен верхний упорный подшипник, которые установлены на вертикальном опорном валу с направляющей шпонкой, причем нижний упорный подшипник в нижнем кольцевом пазу зафиксирован нижней крышкой, закрепленной болтами за нижнее круглое посадочное отверстие, а верхний упорный подшипник в верхнем кольцевом пазу зафиксирован верхней крышкой, закрепленной болтами за верхнее круглое посадочное отверстие; на вертикальном опорном валу от нижней крышки установлена ведомая коническая шестерня таким образом, что направляющая шпонка заходит в сквозной шпоночный паз, выполненный в посадочном отверстии конической шестерни, а сверху конической шестерни на вертикальном опорном валу установлен шарнир, причем направляющая шпонка заходит в сквозной шпоночный паз, выполненный в посадочном отверстии шарнира; внутри корпуса на опорах расположен электропривод, вал которого проходит через сквозное отверстие, а на свободном конце вала закреплена ведущая коническая шестерня, входящая в зацепление с ведомой конической шестерней.
| CN 112078766 А, 15.12.2020 | |||
| Стыковочная система беспилотного летательного аппарата | 2018 |
|
RU2680555C1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2490183C1 |
| CN 103112513 A, 22.05.2013. | |||

